
Cluster-Based Transmission Diversity Optimization in Ultra Reliable Low Latency Communication

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
2. Related Work
- We propose the C-OFSMA protocol that ensures higher transmission reliability and minimizes the latency in the intra-vehicular network.
- We compare C-OFSMA scheme with OFSMA:
- –
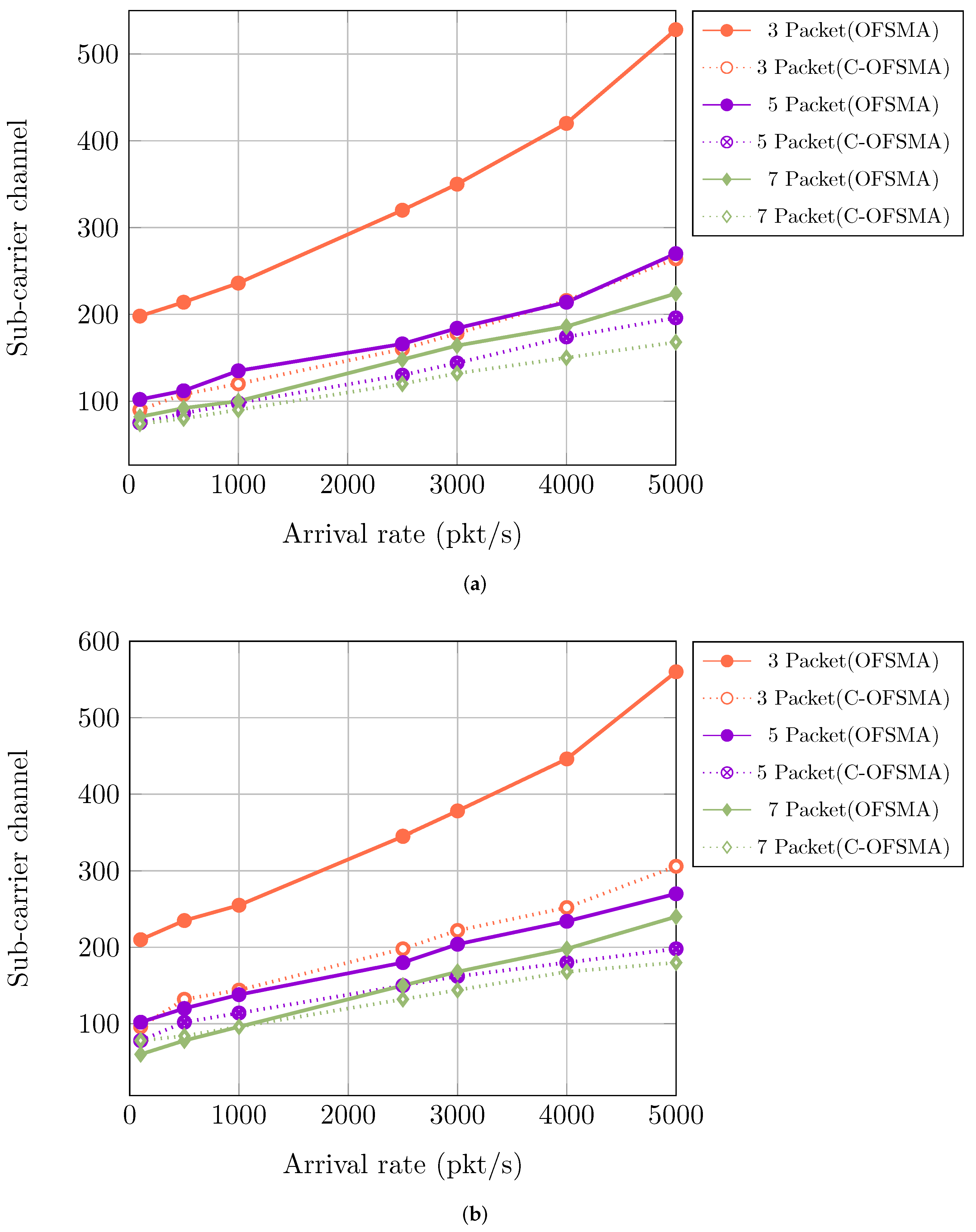
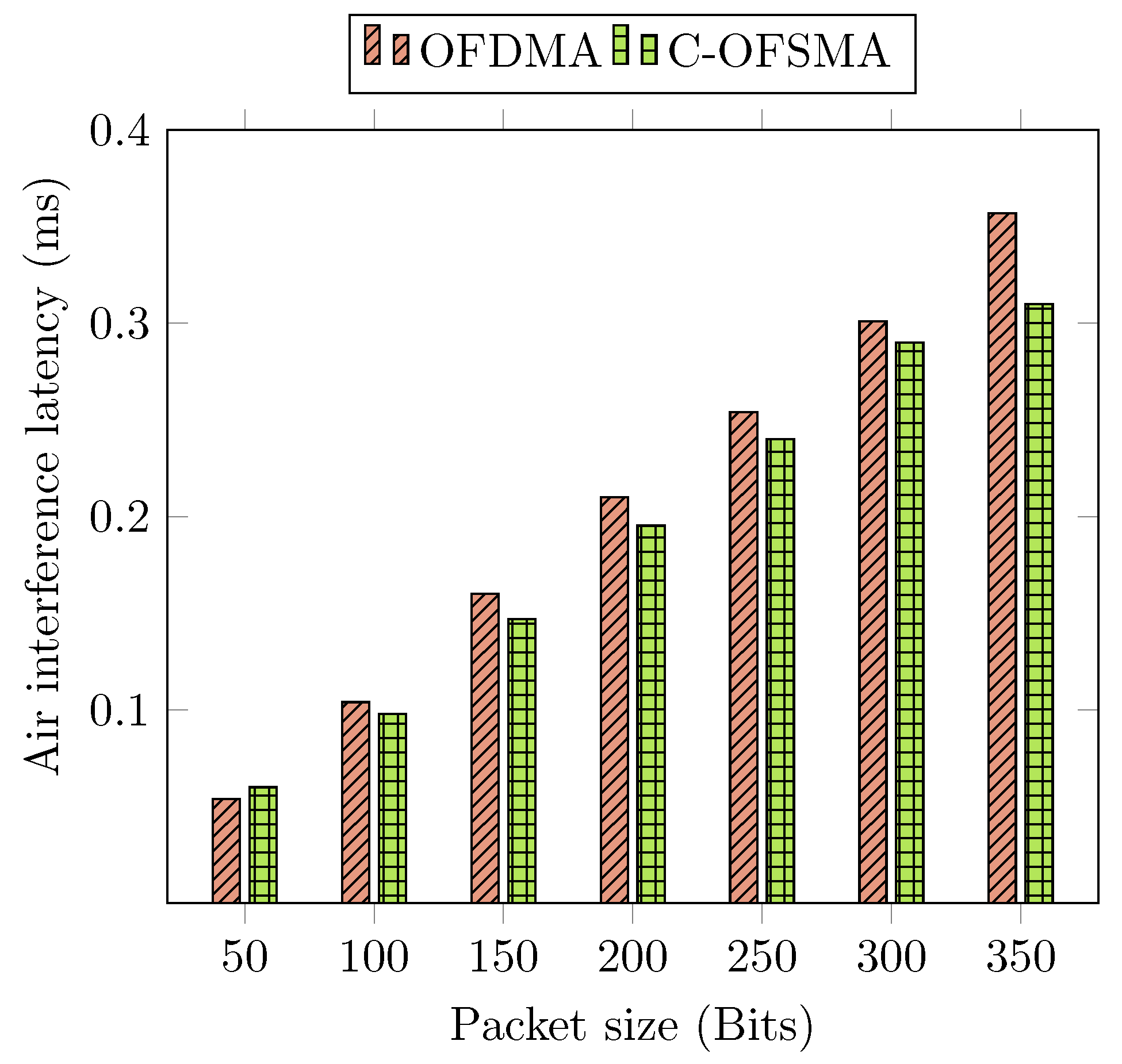
- Evaluating the minimum subcarrier channels to reach the reliability of 99.999% for different packet duplication within stringent latency bound of 0.2 ms.
- –
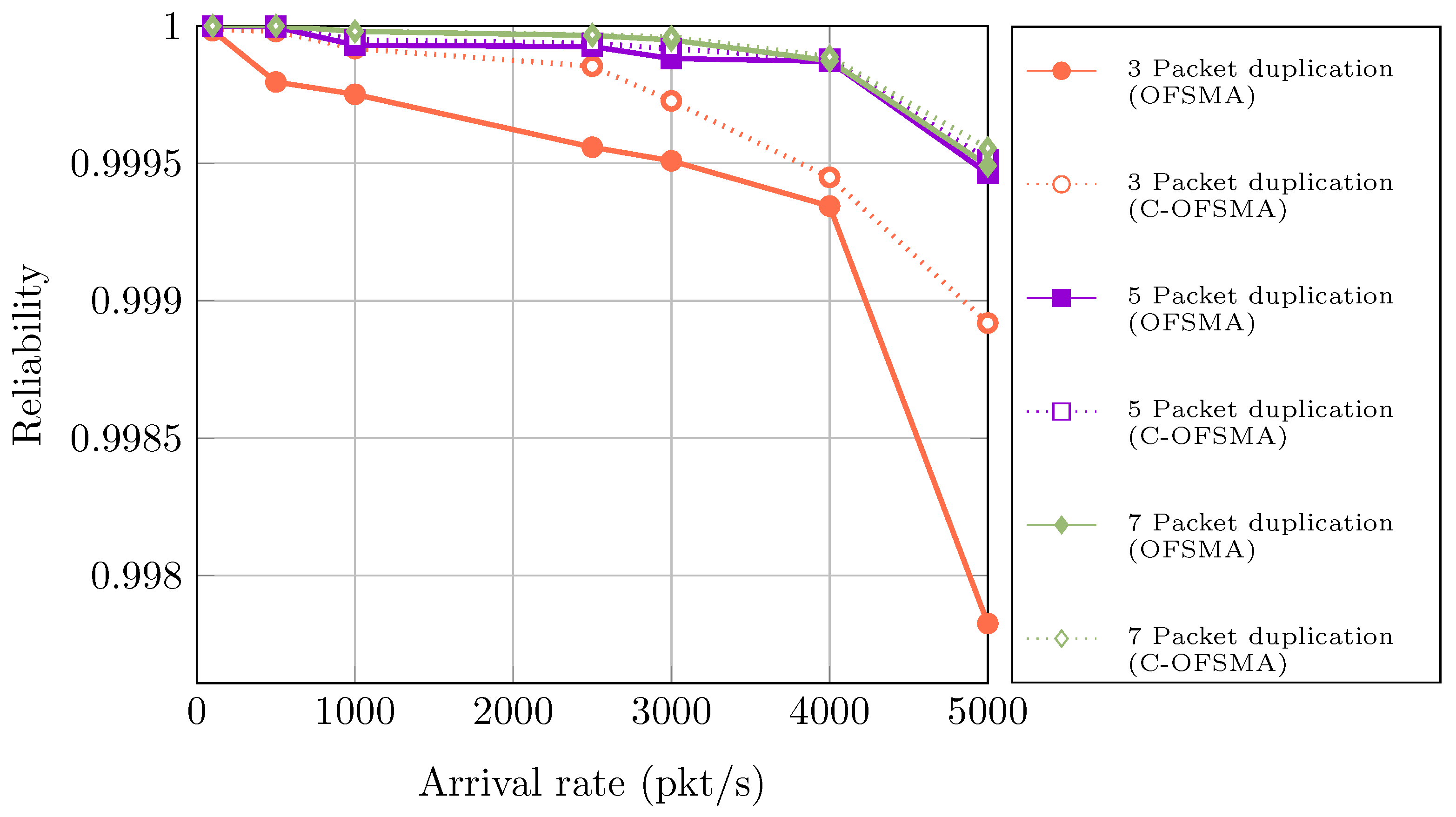
- Evaluating reliability responsiveness, using fixed channels condition.
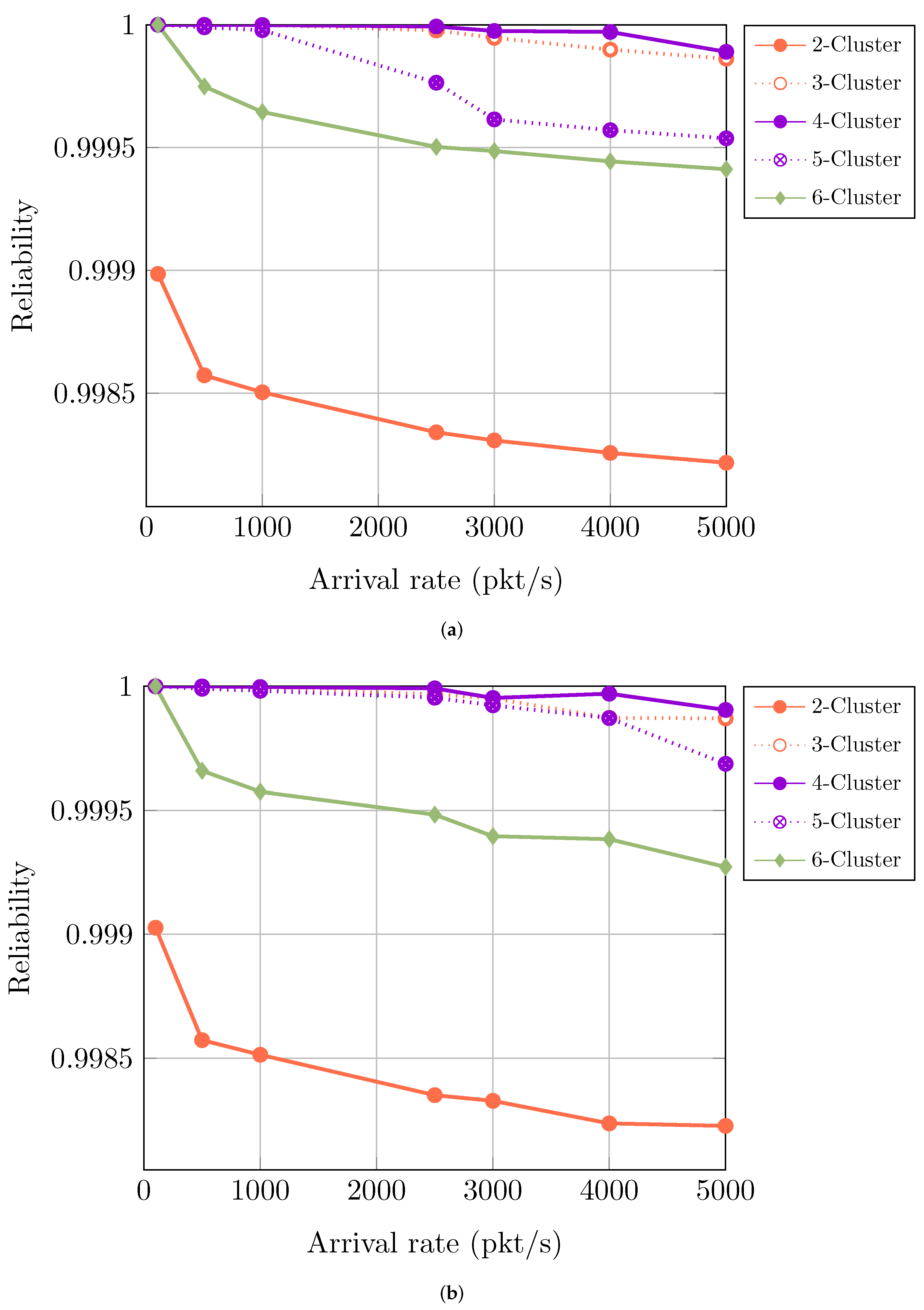
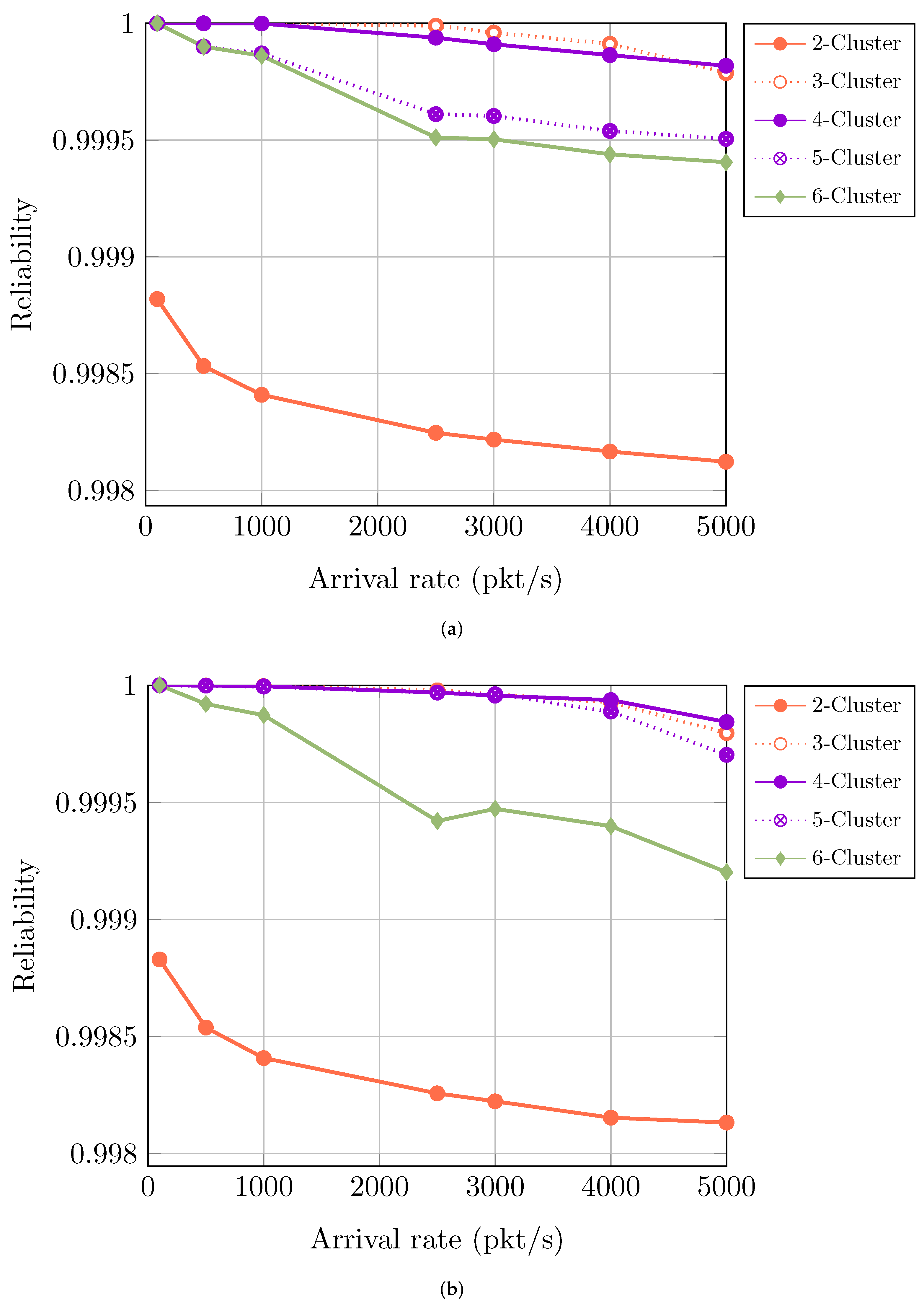
- We evaluate the optimal number of clusters for different packet duplication in terms of reliability analysis.
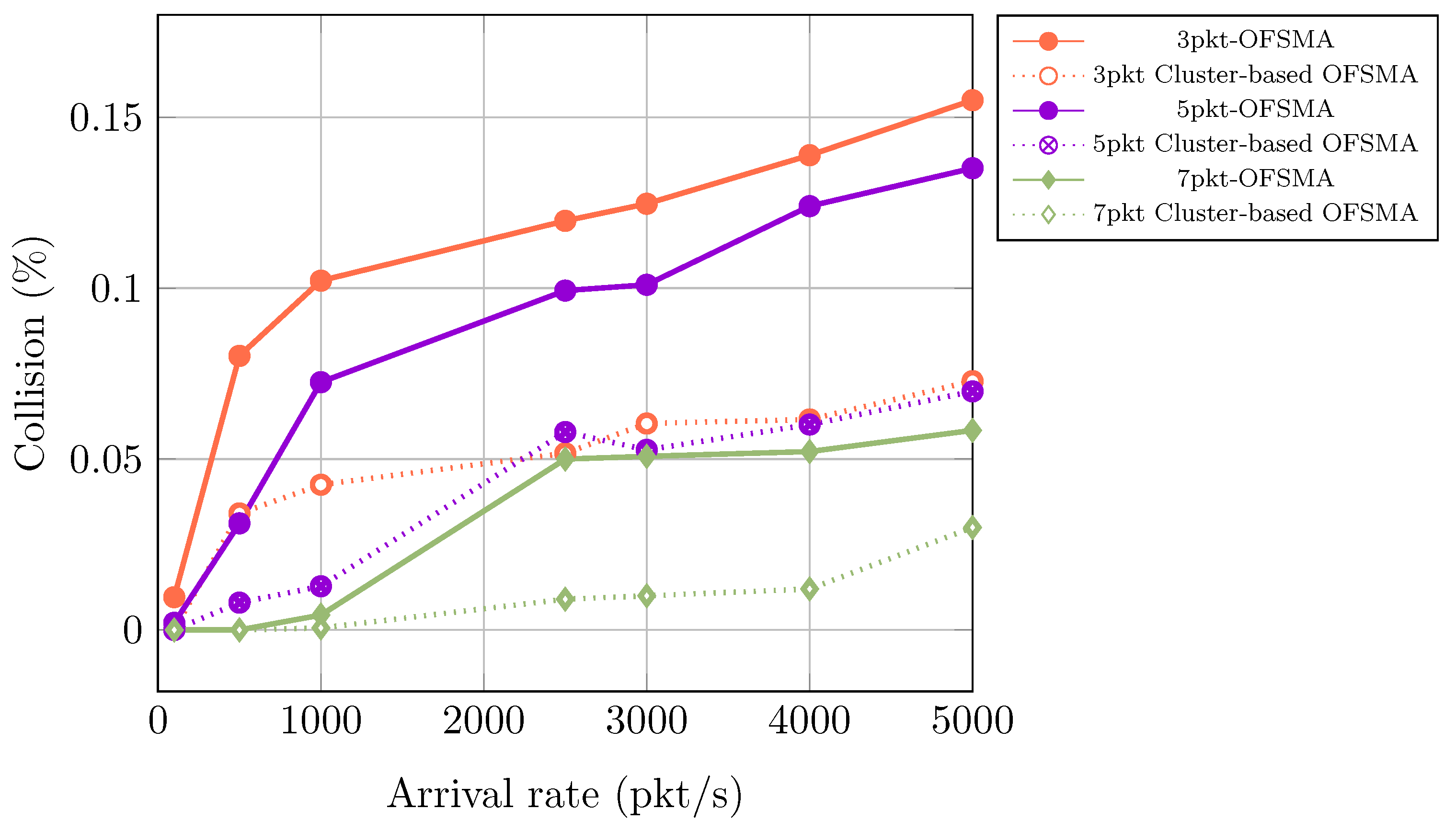
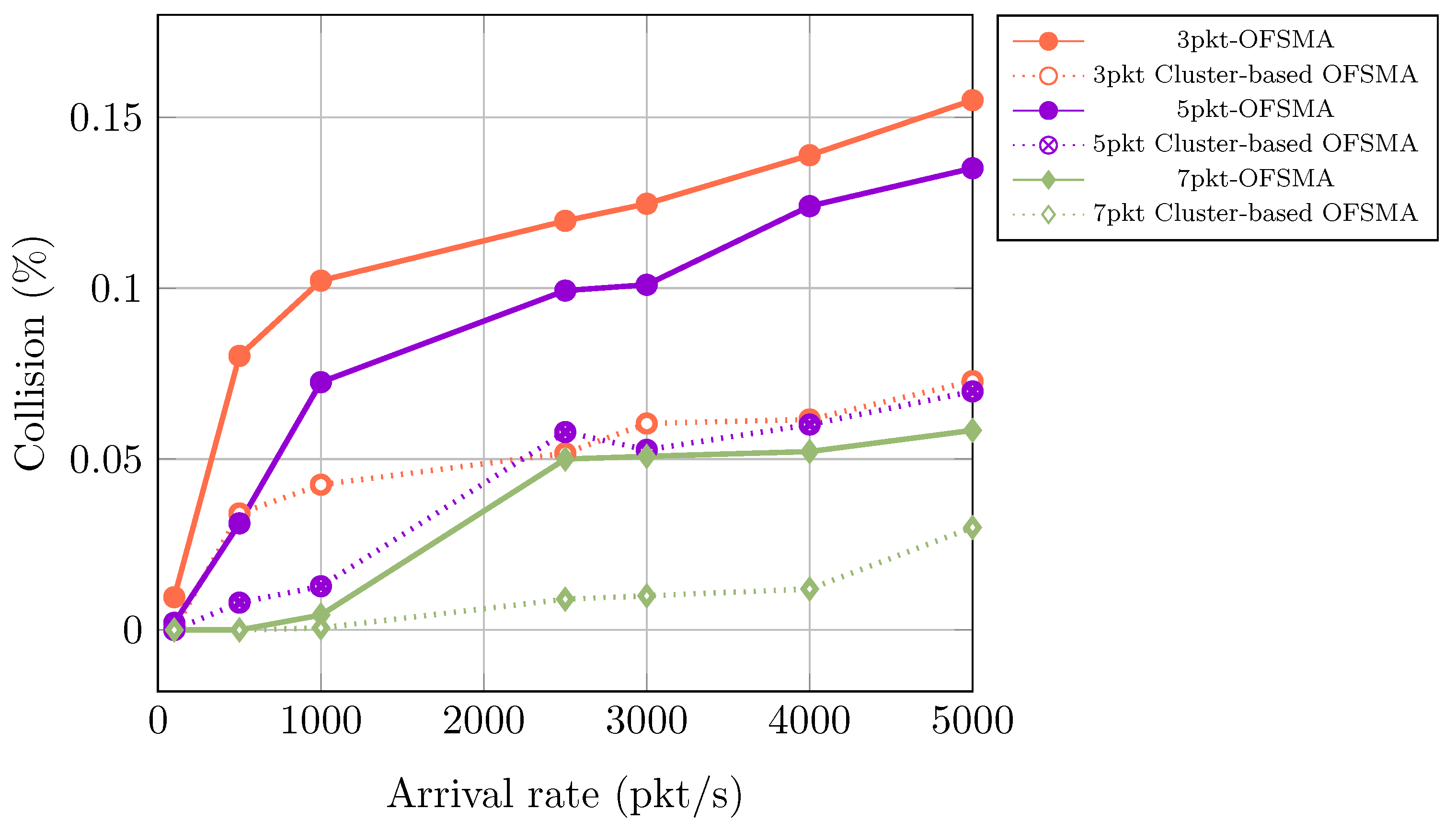
- We determine the collision probability for different packet duplication at different arrival conditions.
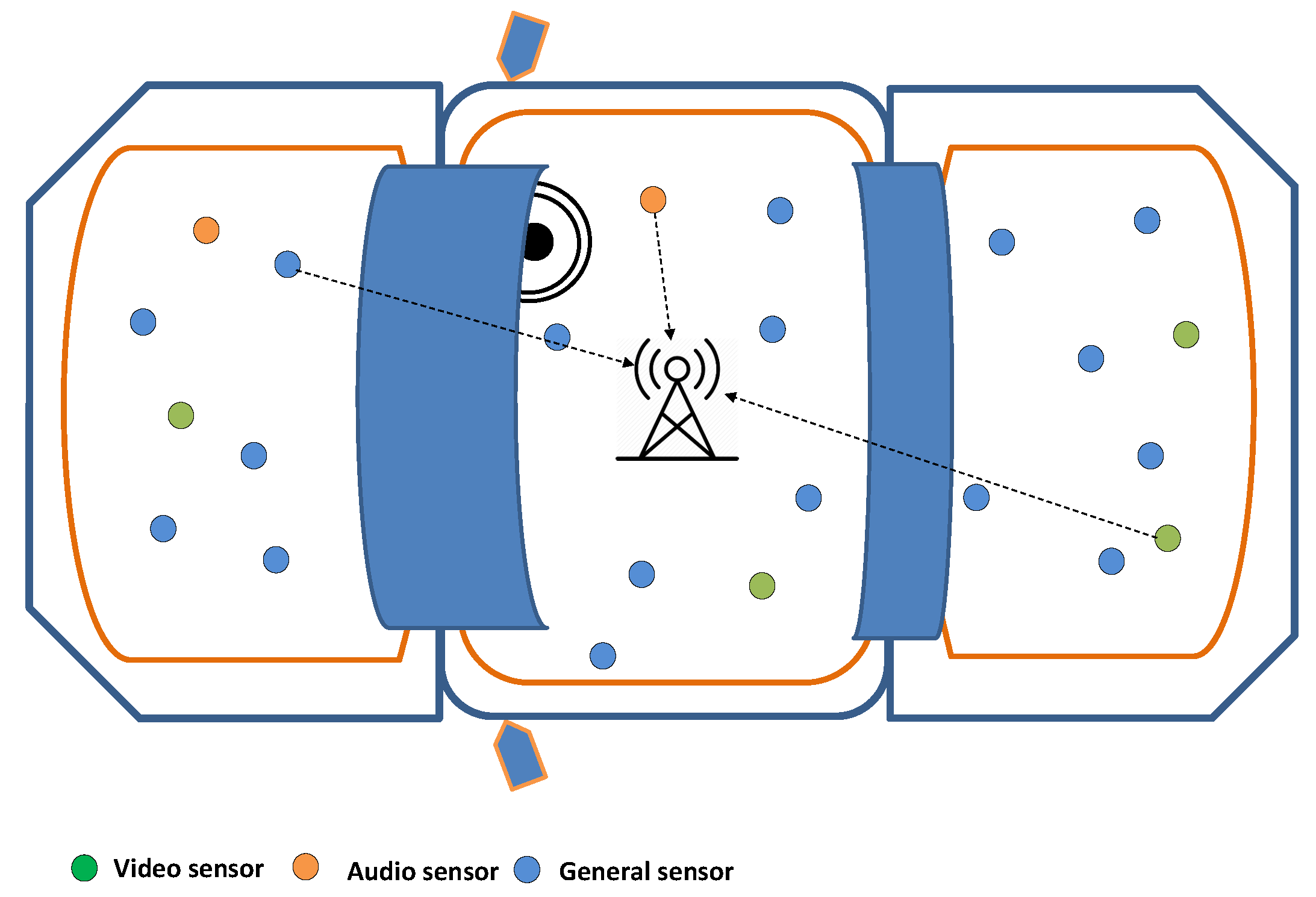
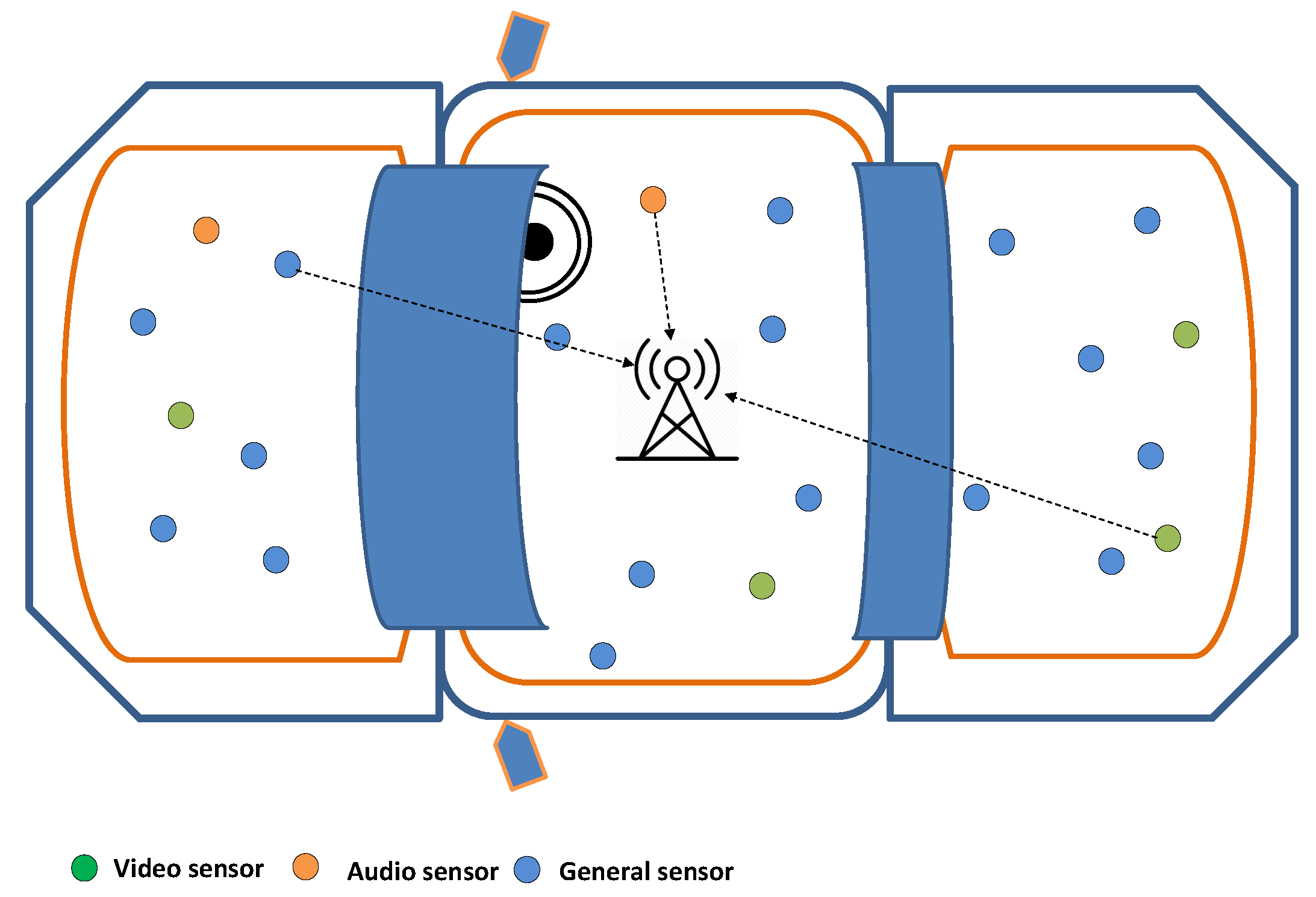
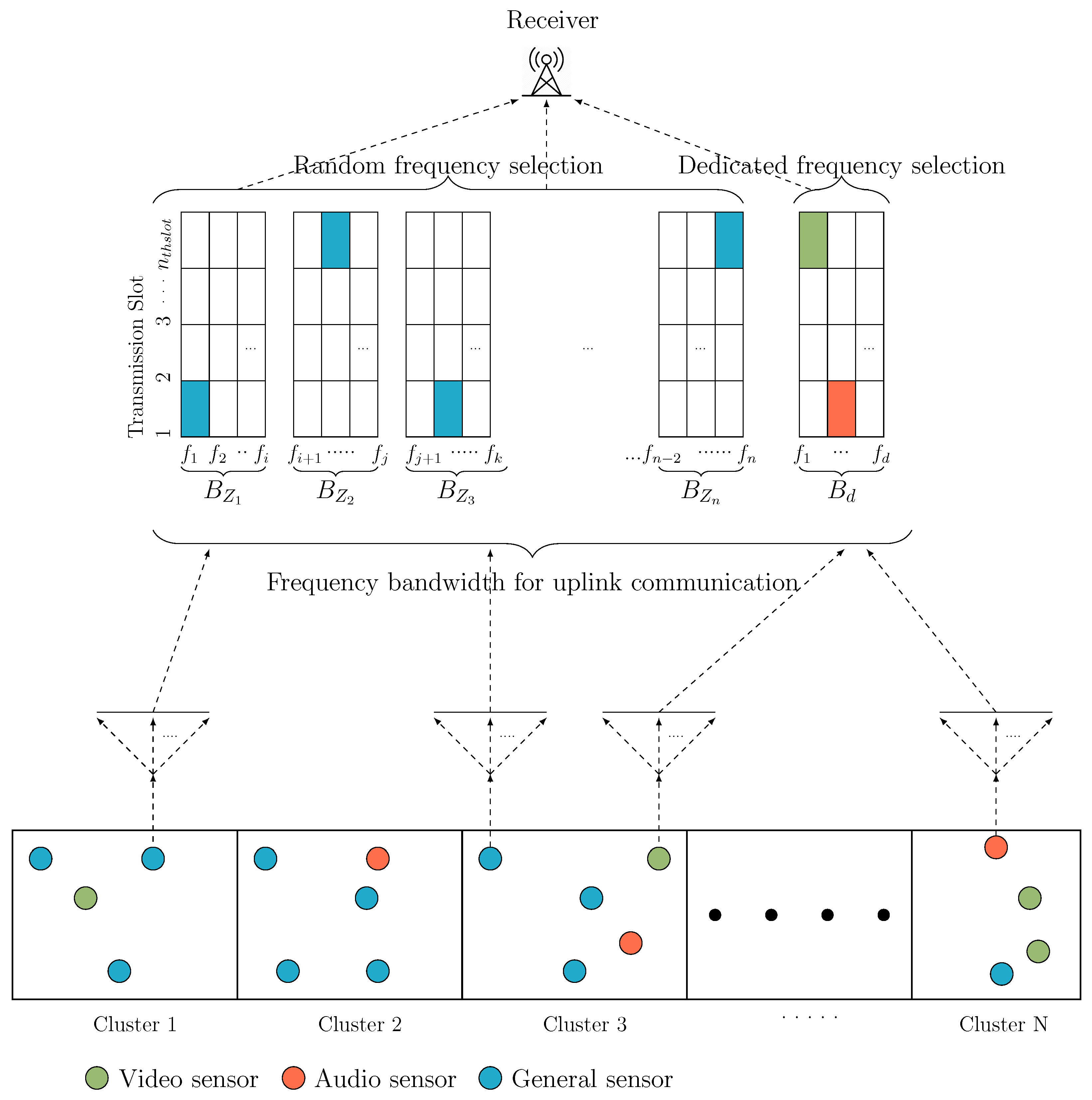
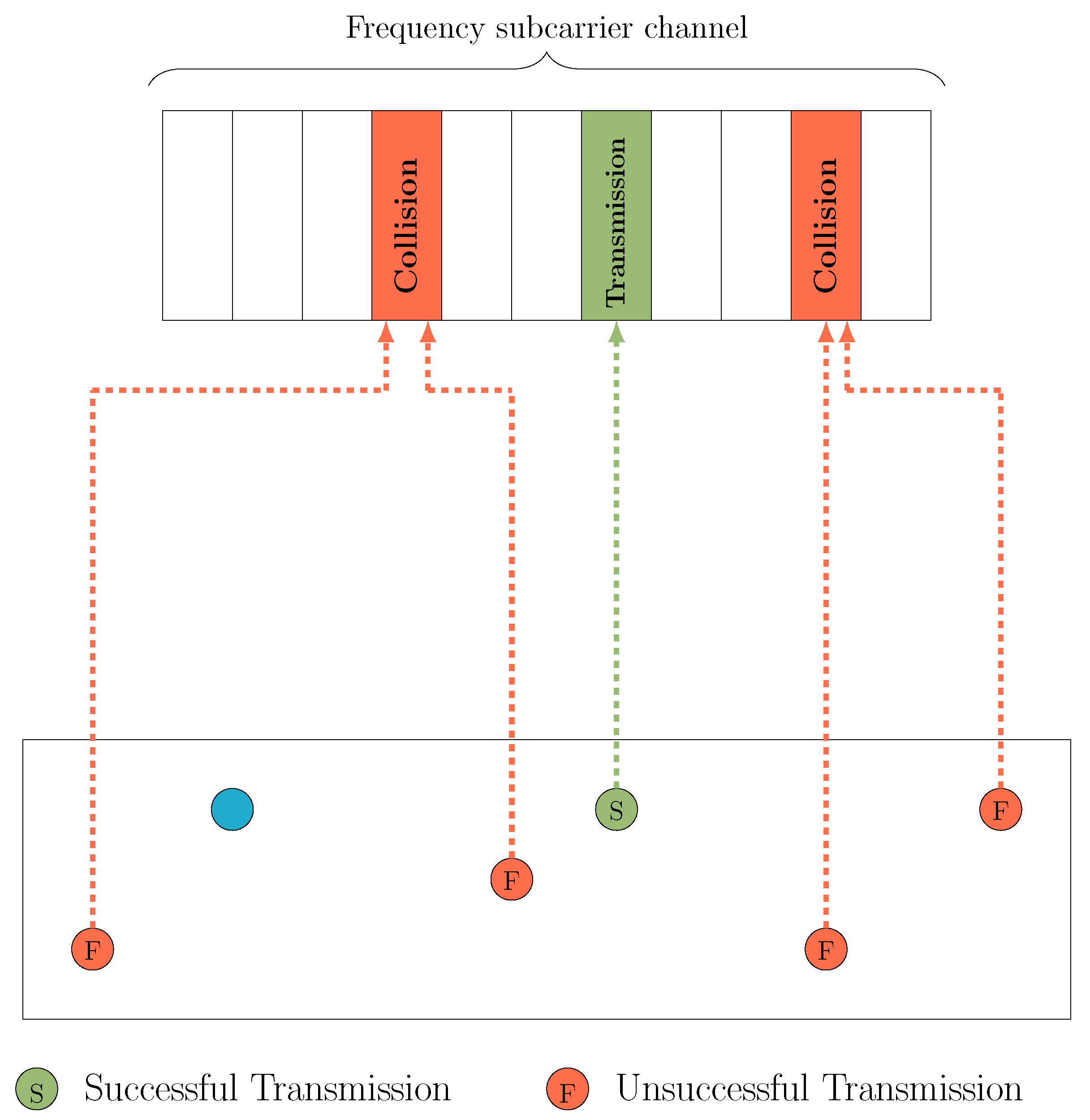
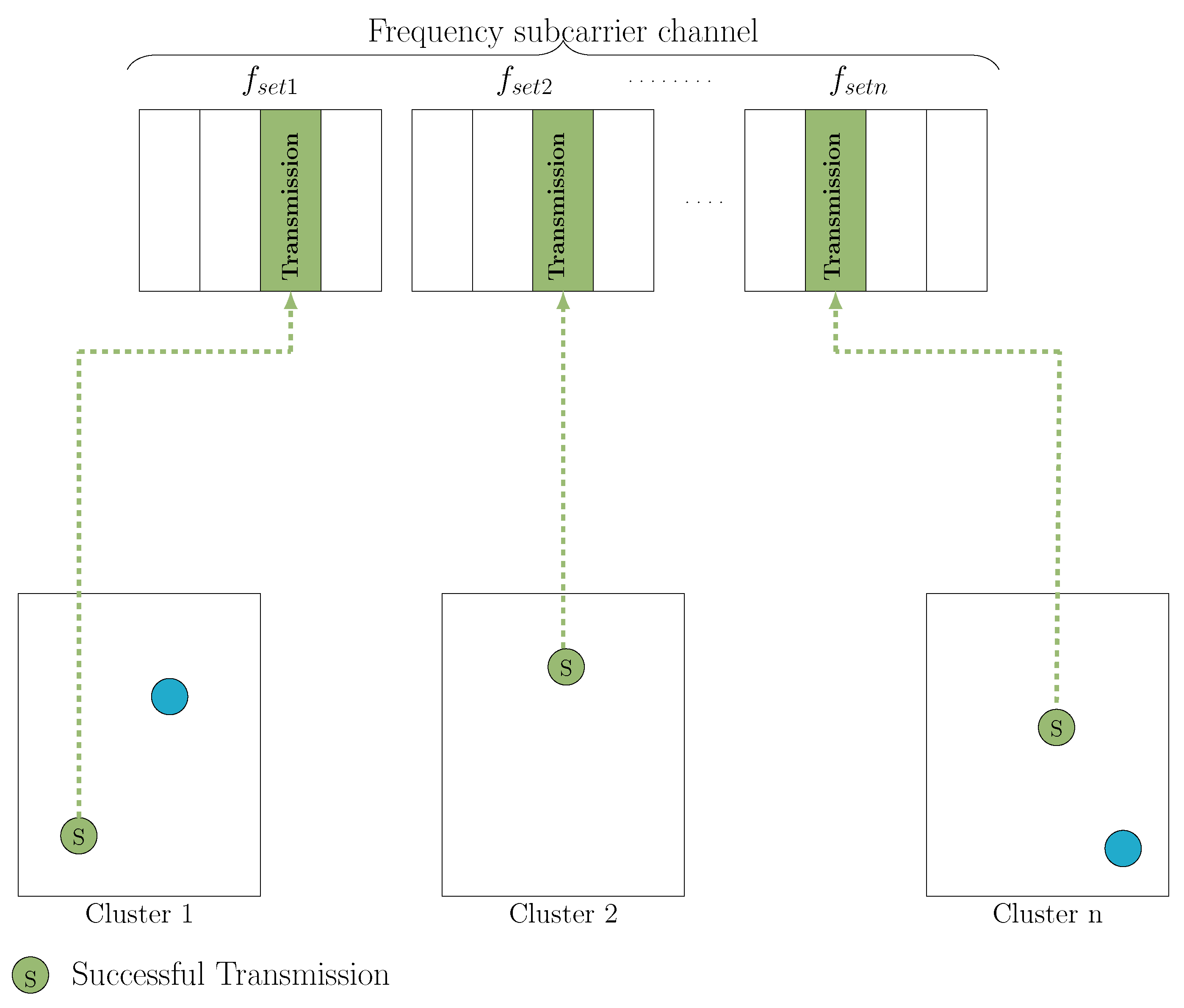
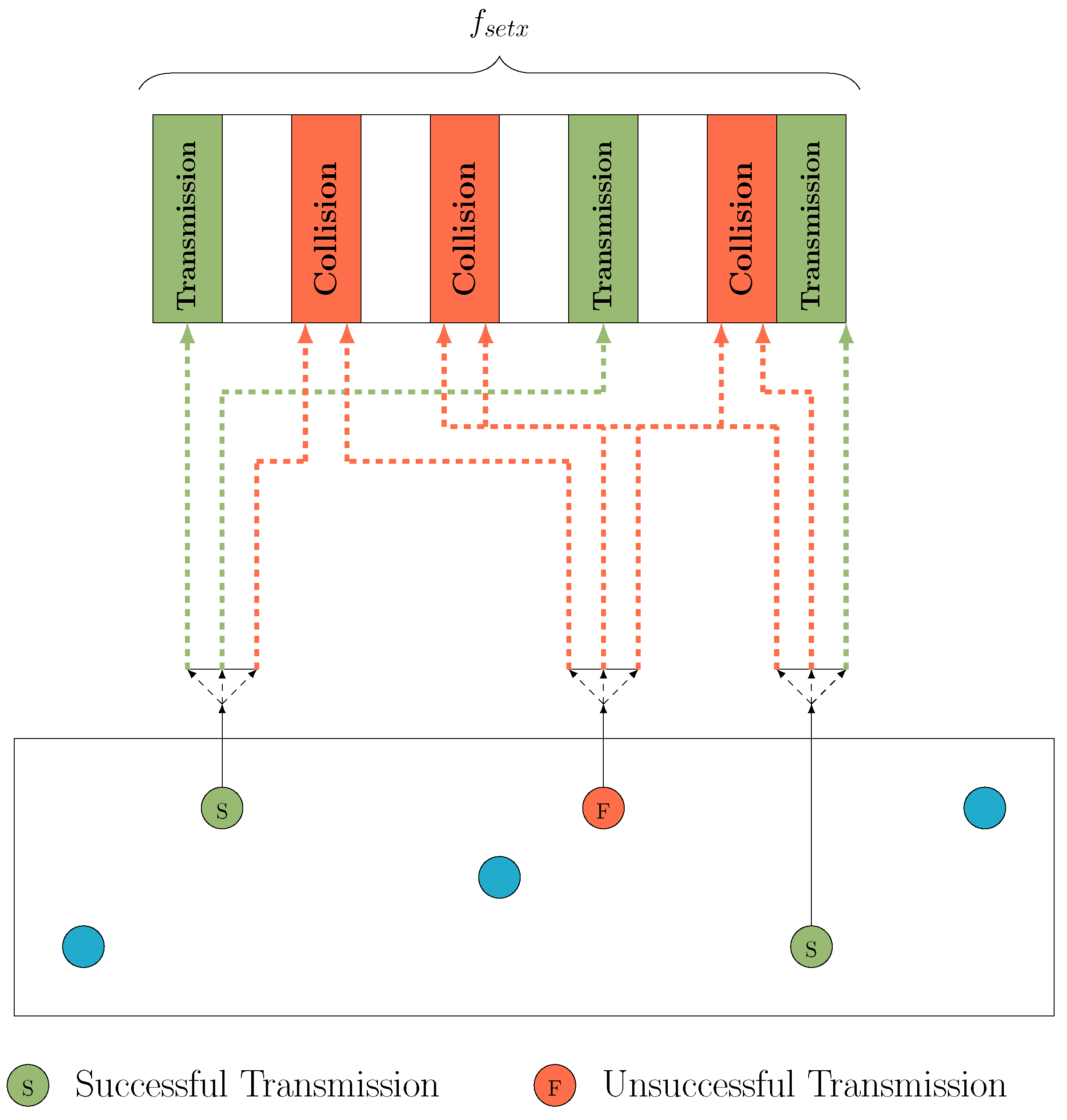
3. System Architecture
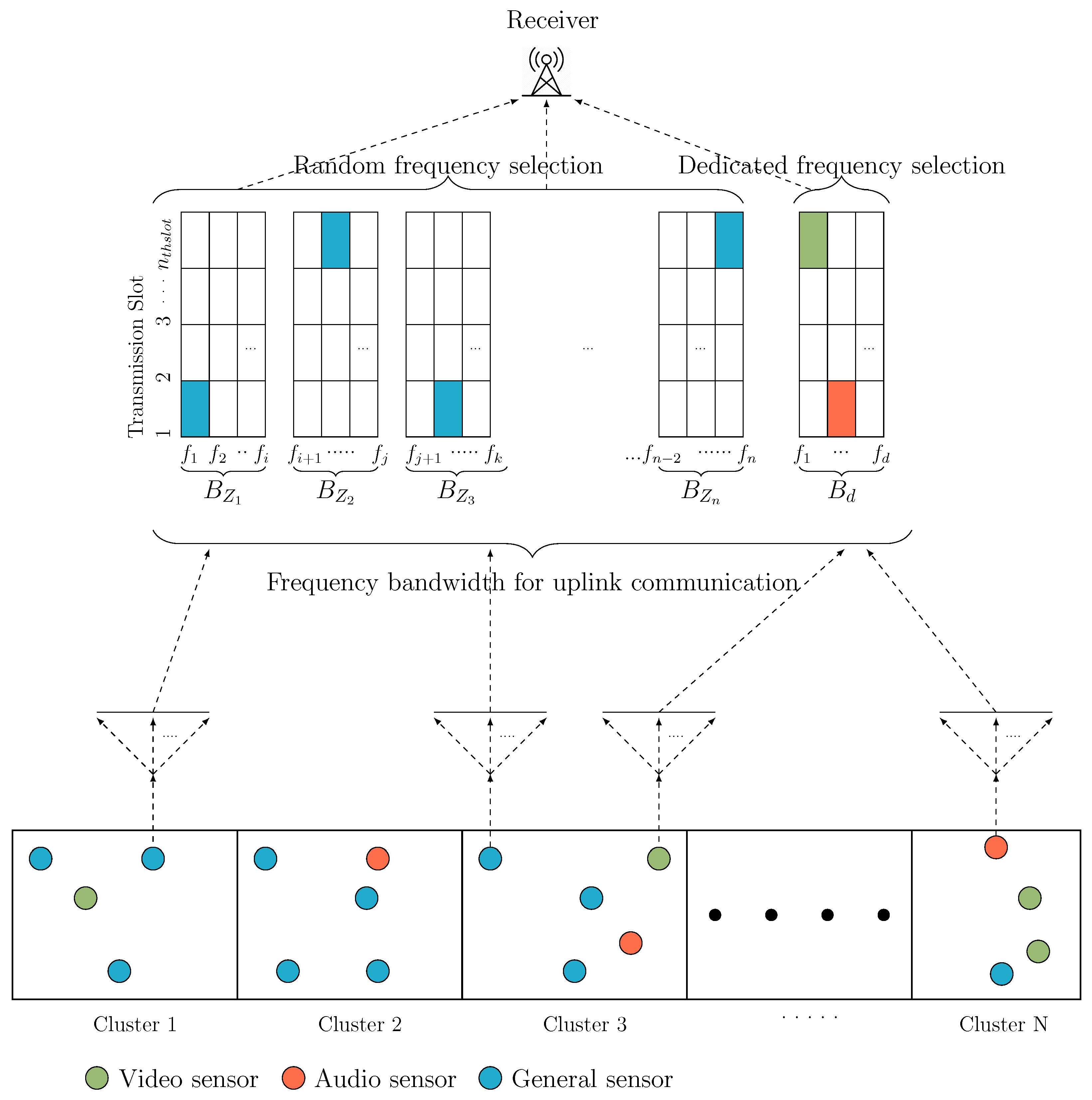
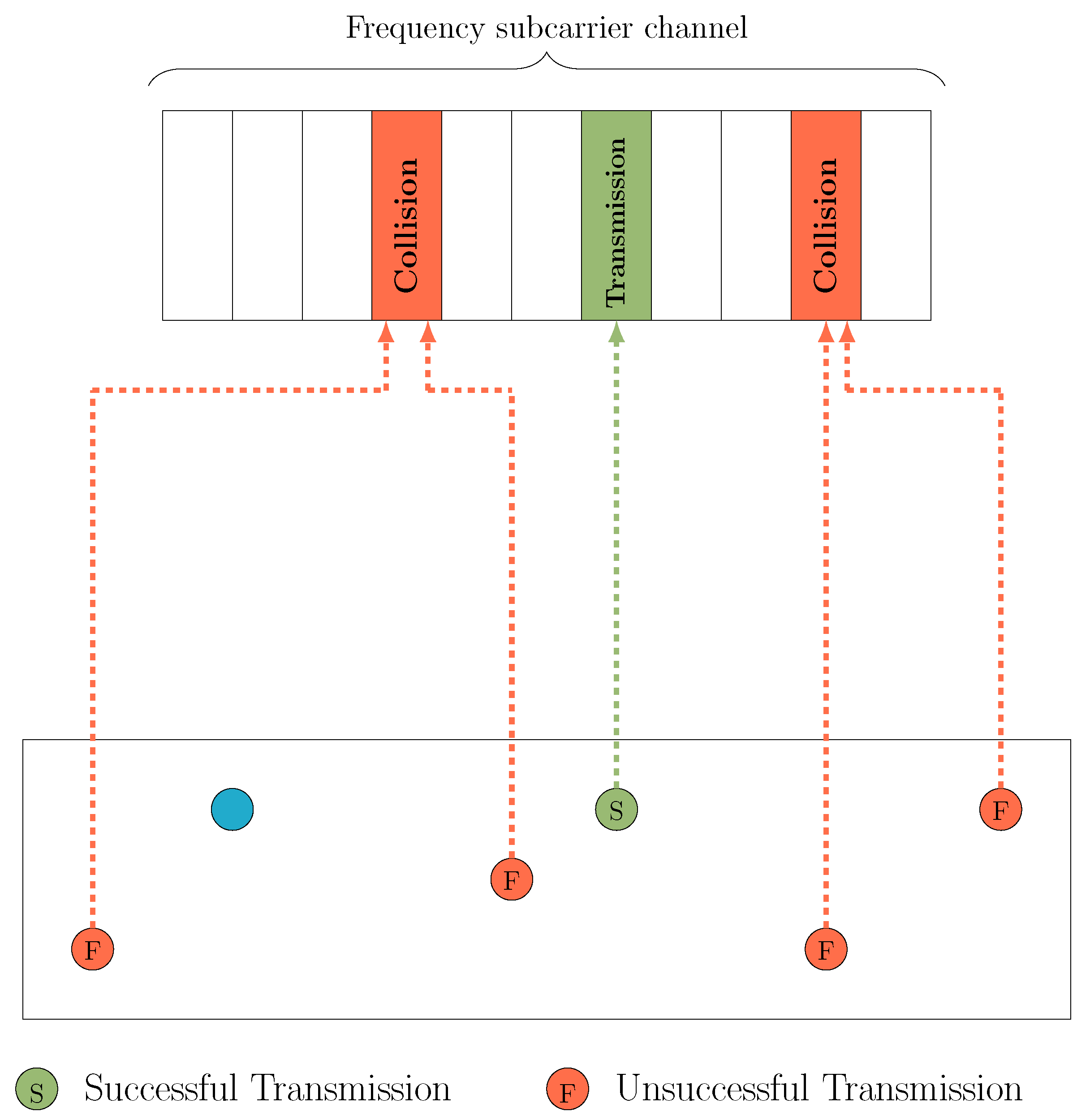
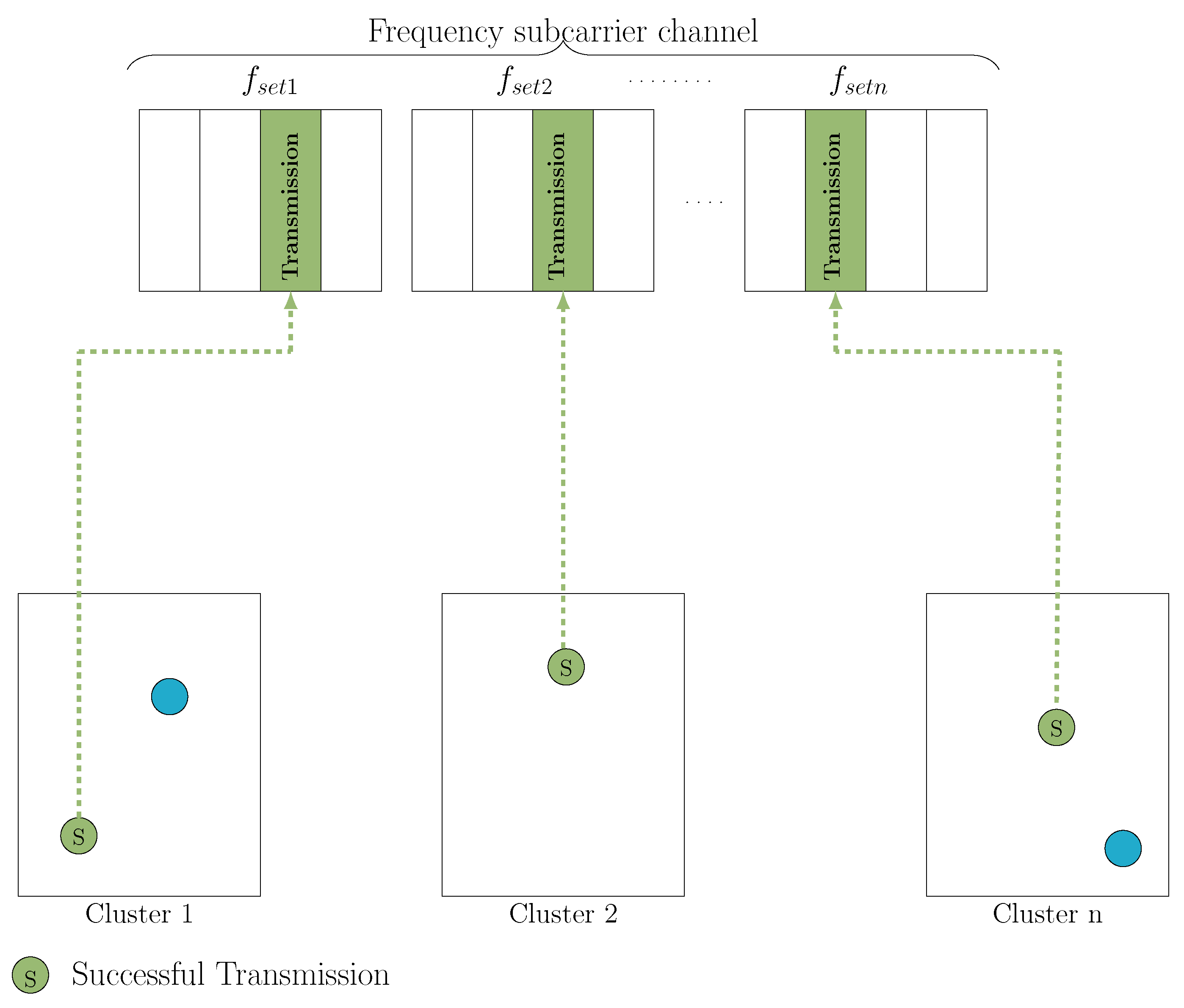
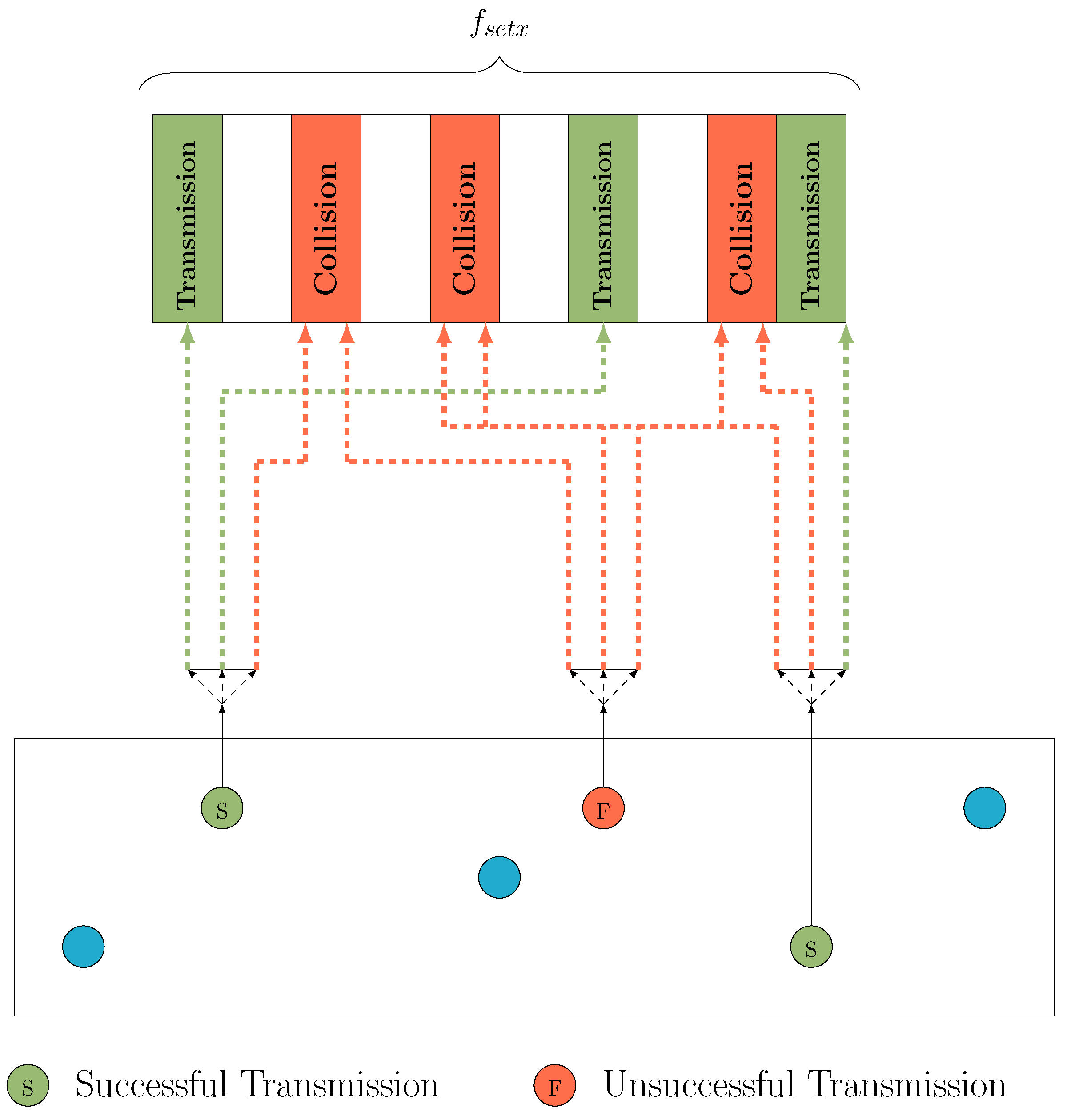
3.1. Packet Transmission Structure
| Algorithm 1 Minimum subcarrier channel detection algorithm for |
Input: N ← Number of subcarrier channels ← Total number of general sensor Dup ← Packet duplication ← Number of cluster ▹ Using K-means clustering ← Number of Sensor in each cluster Output: ←Number of minimum channel to Satisfy the reliability 99.999%
|
| Algorithm 2 Optimal number of Cluster allocation algorithm |
Input: N ← Number of subcarrier channels ← Total number of general sensor M ←Maximum Number of clusters Output: Optimal-Cluster←Number of optimal clusters
|
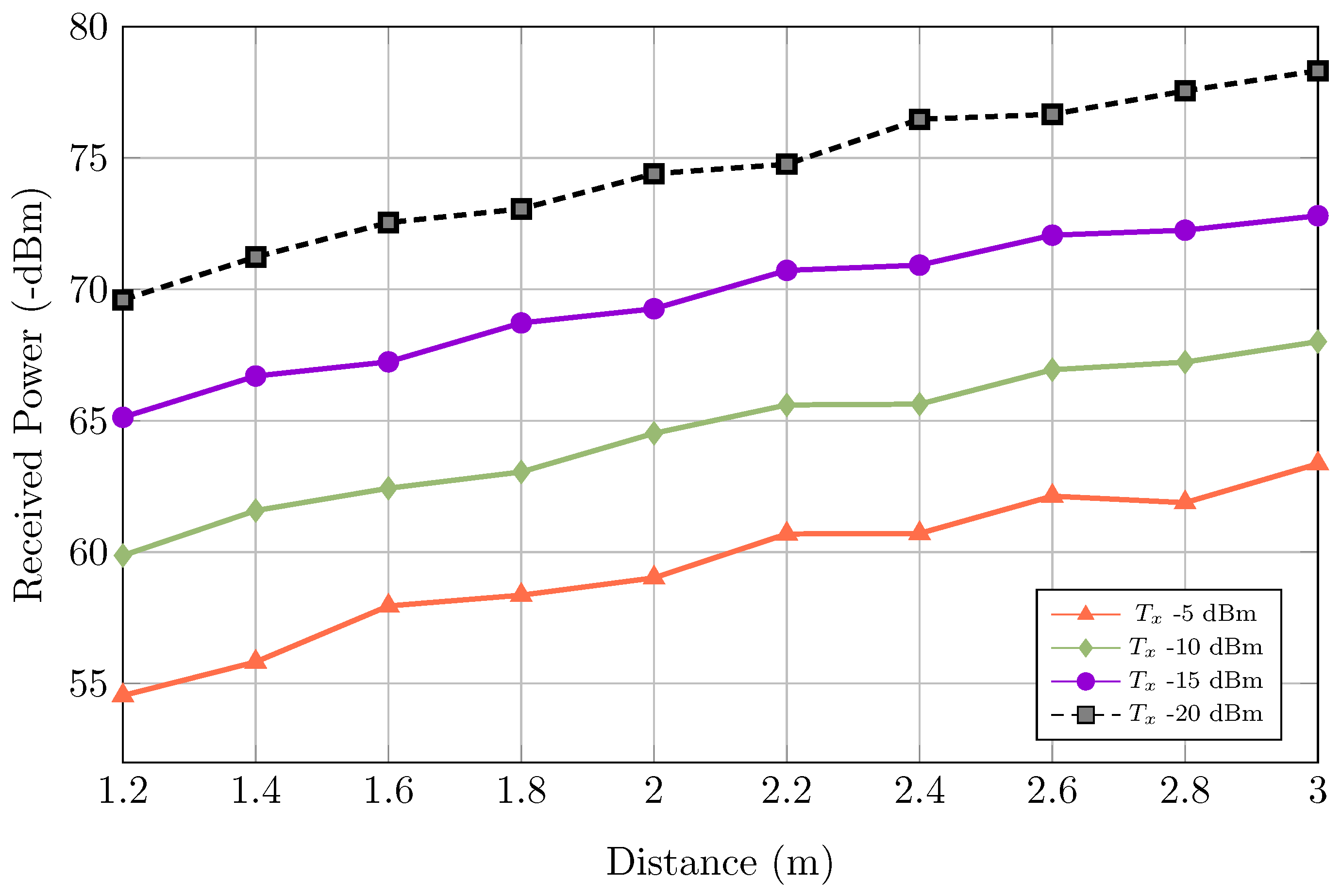
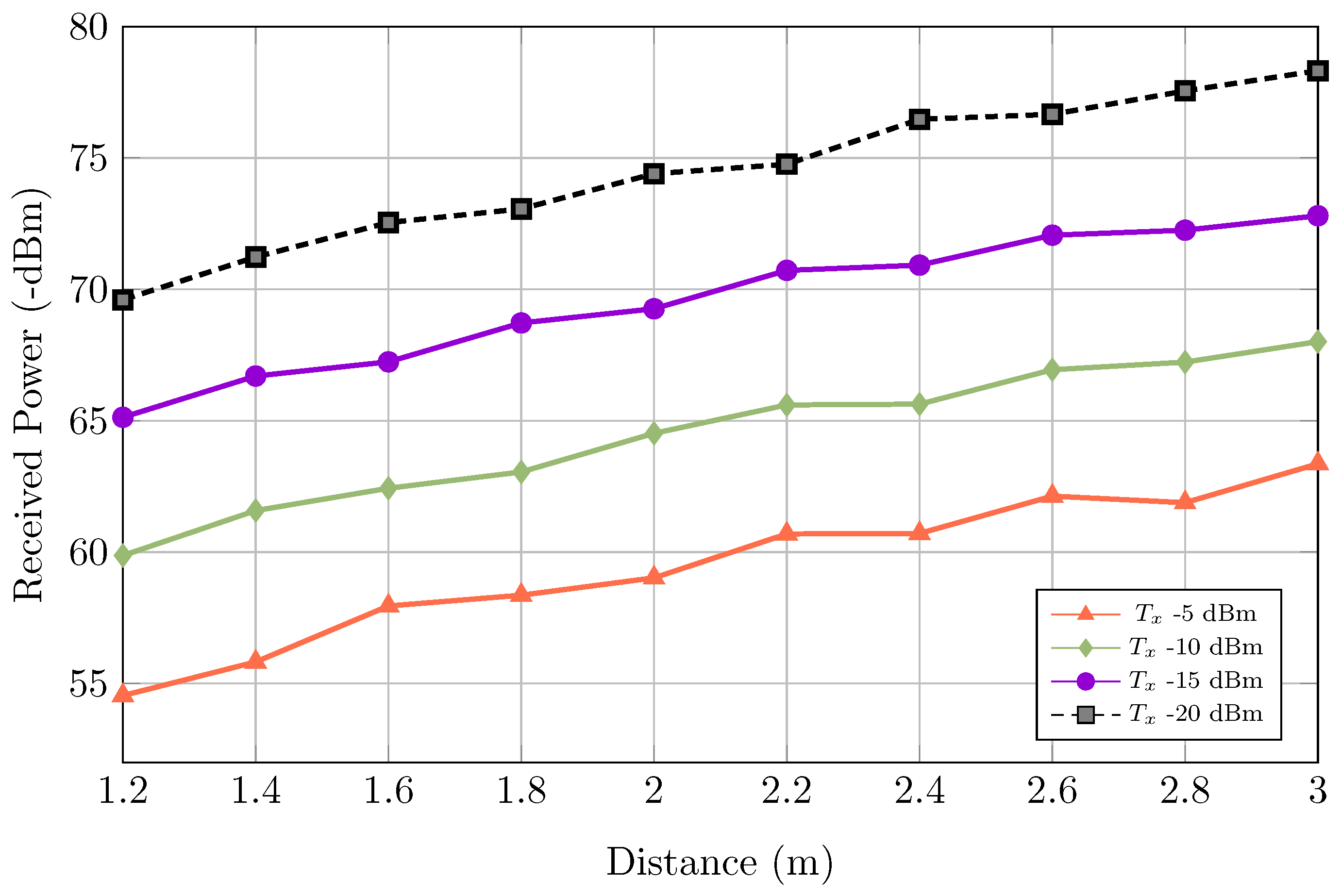
3.2. Path Loss Model
4. Simulation Results
4.1. Subcarrier Channel Analysis
4.2. Reliability Analysis
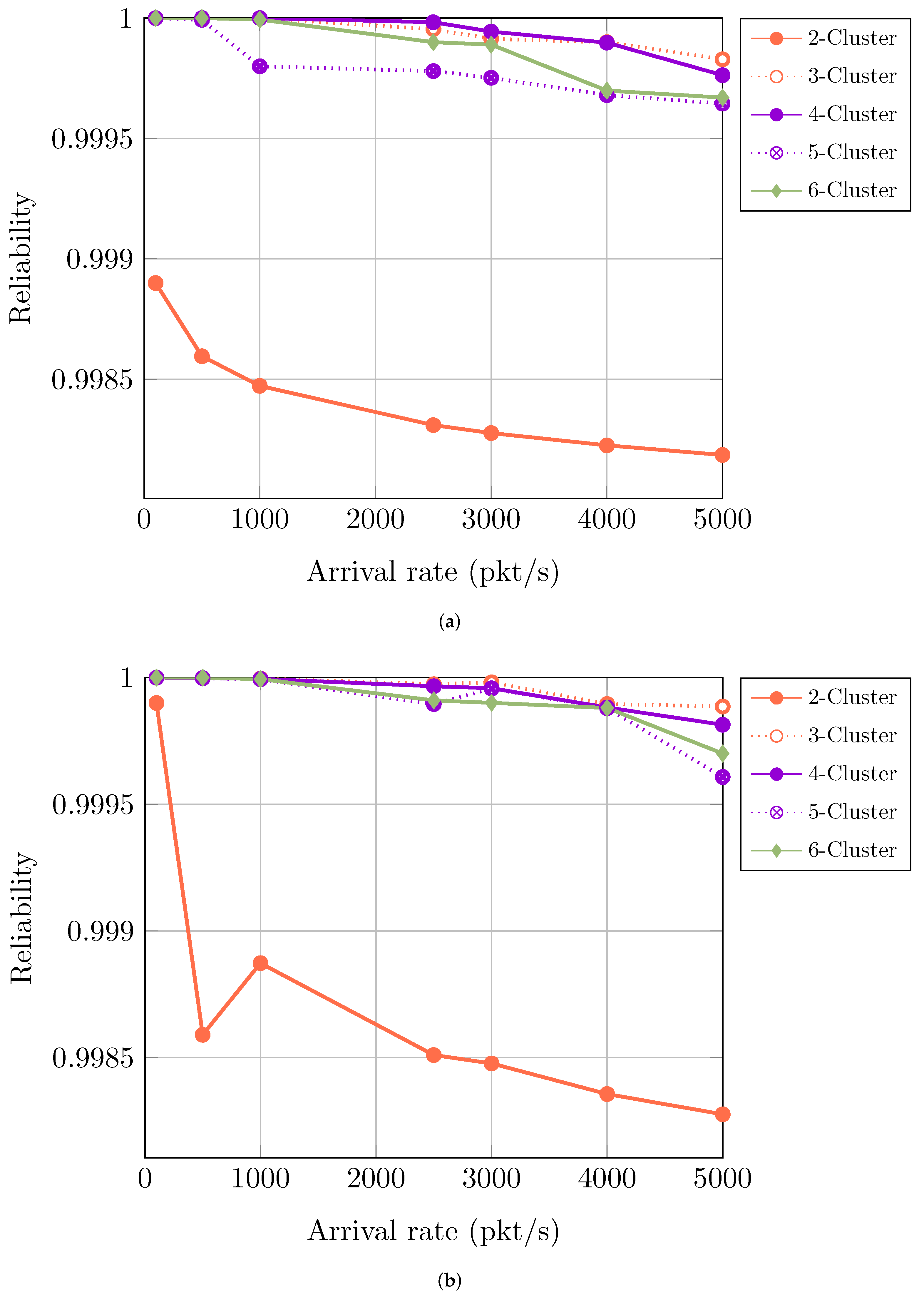
4.3. Optimum Number of Cluster Evaluation
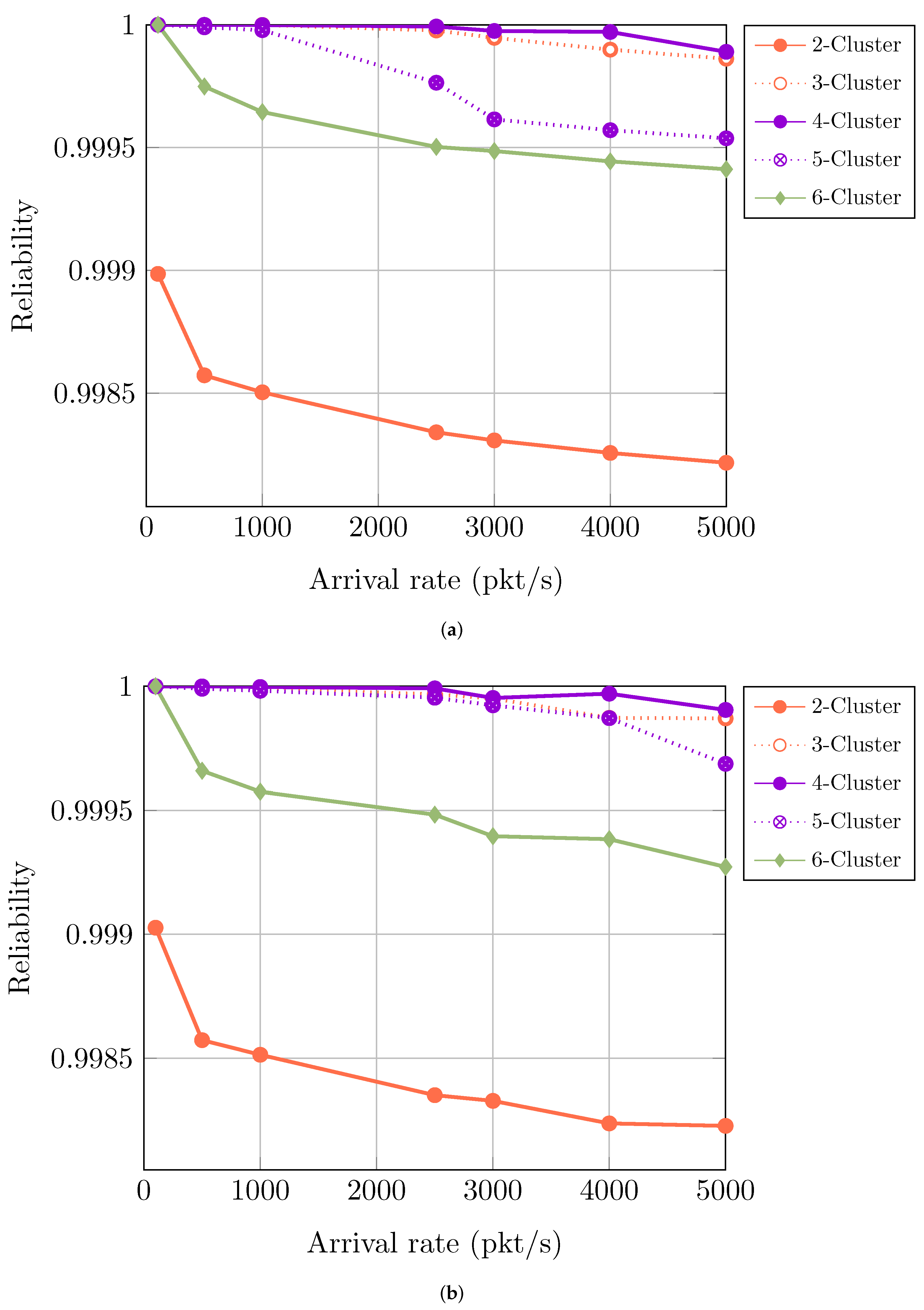
4.3.1. Reliability for Three Packet Duplication
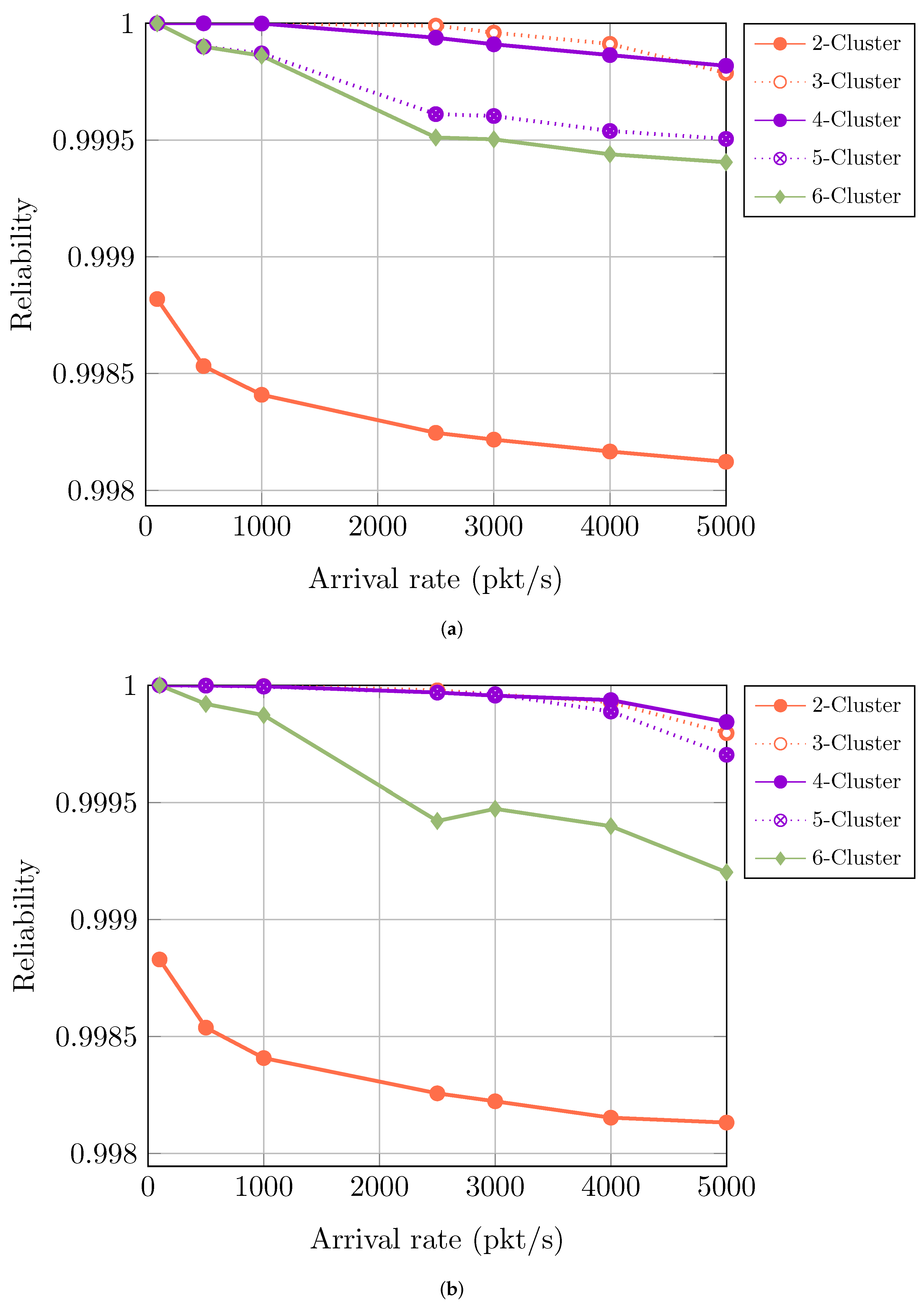
4.3.2. Reliability for Five Packet Duplication
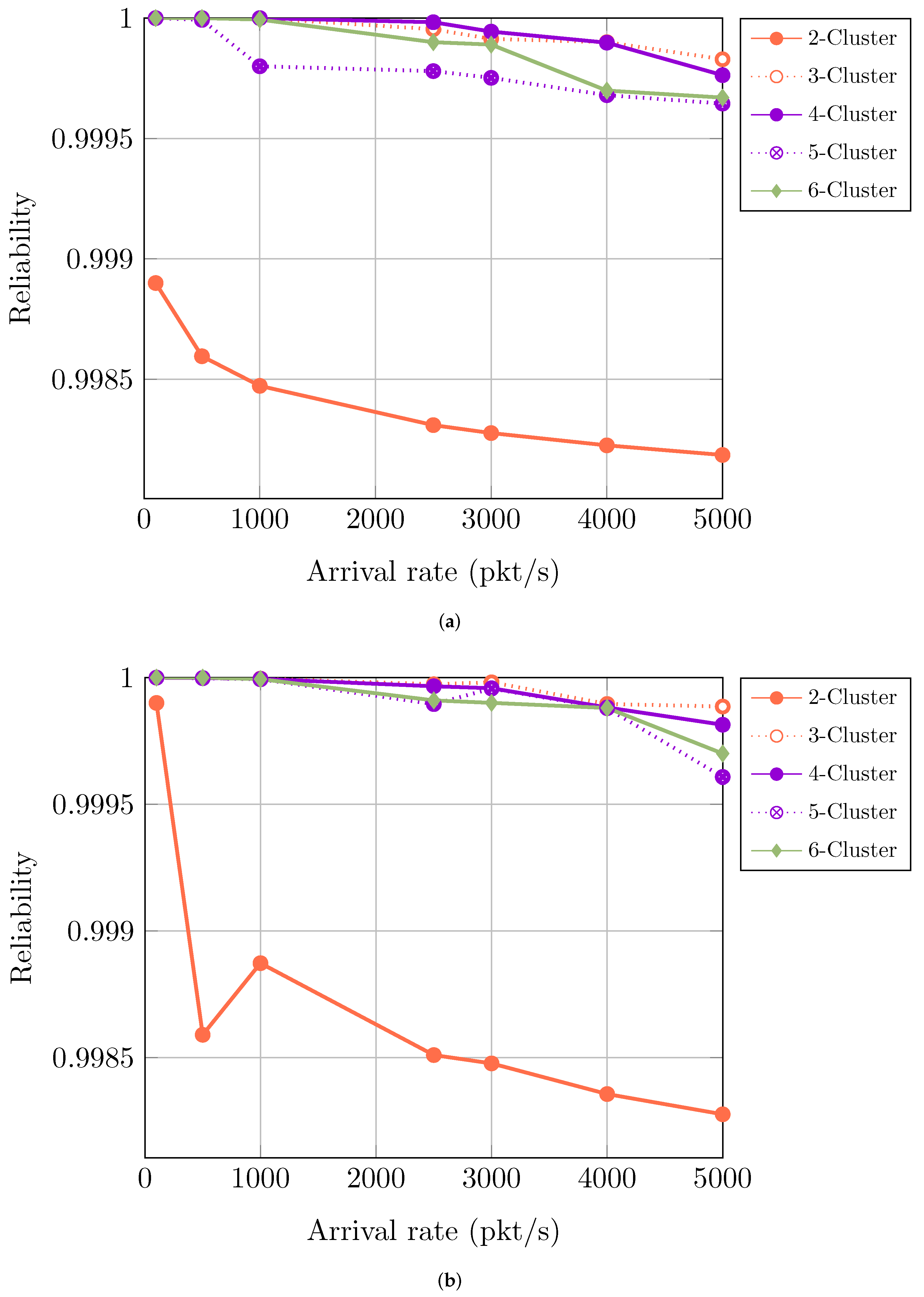
4.3.3. Reliability for Seven Packet Duplication
4.4. Collision Ratio
4.5. Path Loss
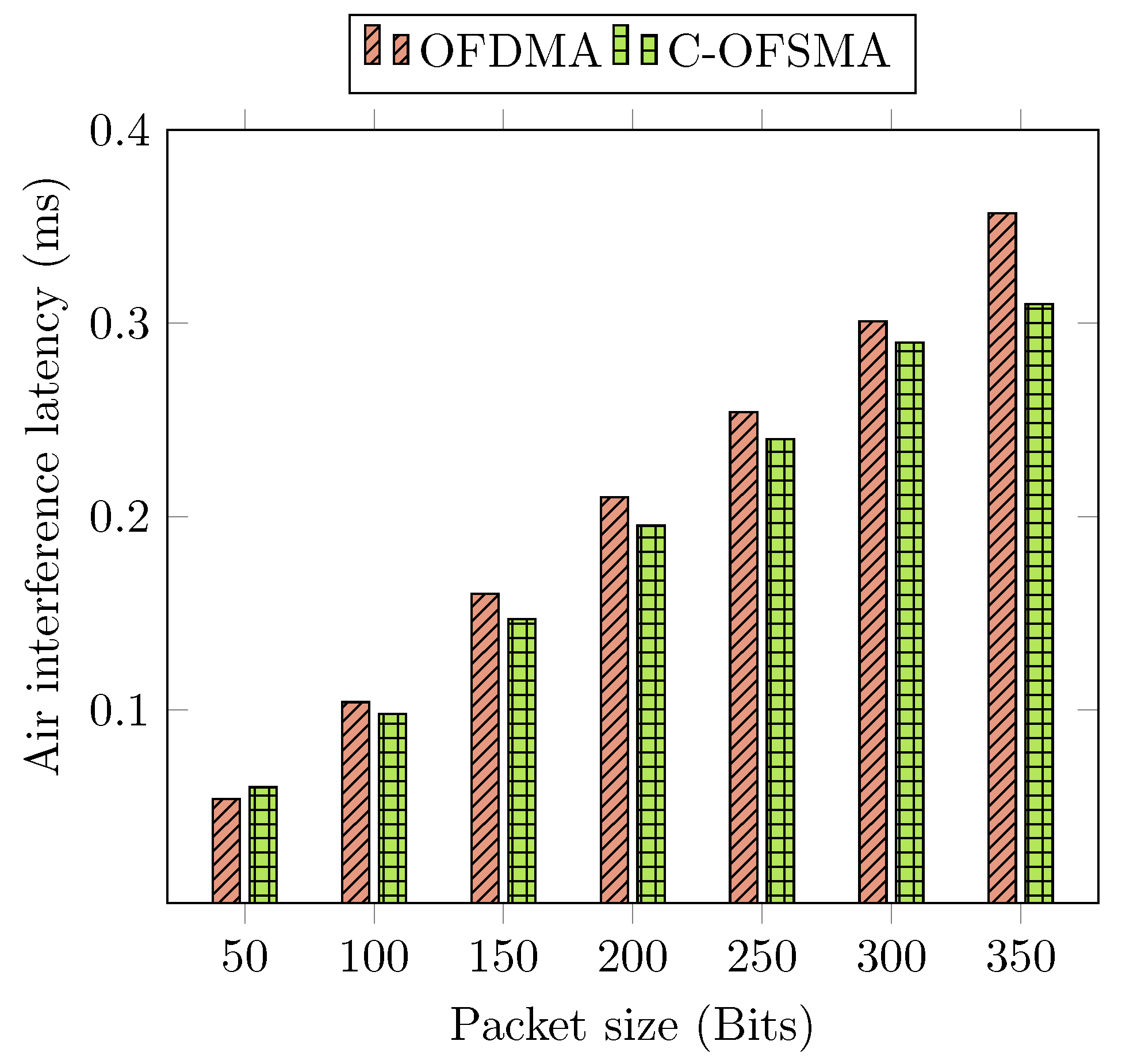
4.6. Latency Calculation for Different Packet Sizes
4.7. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| C-OFSMA | Cluster-based Orthogonal Frequency Subcarrier-based Multiple Access |
| OFSMA | Orthogonal Frequency Subcarrier-based Multiple Access |
| URLLC | Ultra-Reliable Low-Latency Communication |
| WSN | Wireless Sensor Network |
| 3GPP | 3rd Generation Partnership Project |
| eMBB | evolved Mobile Broadband |
| mMTC | massive Machine Type Communication |
| URC | Ultra-Reliable Communication |
| TTI | Transmission Time Interval |
| CAN | Controller Area Network |
| LIN | Local Interconnect Network |
| CDMA | Code-Division Multiple Access |
| OFDM | Orthogonal Frequency-Division Multiplexing |
| QoS | Quality of Service |
| HAS | Hybrid Access Scheme |
| LDPC | Low-Density Parity-Check |
| MIMO | Multiple-input Multiple-output |
| DCA | Dedicate Access Channel |
References
- Chen, B.; Wan, J.; Shu, L.; Li, P.; Mukherjee, M.; Yin, B. Smart factory of industry 4.0: Key technologies, application case, and challenges. IEEE Access 2017, 6, 6505–6519. [Google Scholar] [CrossRef]
- Segura, D.; Khatib, E.J.; Munilla, J.; Barco, R. 5G Numerologies Assessment for URLLC in Industrial Communications. Sensors 2021, 21, 2489. [Google Scholar] [CrossRef]
- Kundaliya, B. Challenges of WSNs in IoT. In Wireless Sensor Networks-Design, Deployment and Applications; IntechOpen: London, UK, 2020. [Google Scholar]
- Elvas, L.B.; Ferreira, J.C. Intelligent Transportation Systems for Electric Vehicles. Energies 2021, 14, 5550. [Google Scholar] [CrossRef]
- Le, T.K.; Salim, U.; Kaltenberger, F. An overview of physical layer design for Ultra-Reliable Low-Latency Communications in 3GPP Releases 15, 16, and 17. IEEE Access 2020, 9, 433–444. [Google Scholar] [CrossRef]
- Sun, C.; She, C.; Yang, C. Energy-efficient resource allocation for ultra-reliable and low-latency communications. In Proceedings of the GLOBECOM 2017-2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor technologies for intelligent transportation systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [Green Version]
- Popovski, P.; Nielsen, J.J.; Stefanovic, C.; De Carvalho, E.; Strom, E.; Trillingsgaard, K.F.; Bana, A.S.; Kim, D.M.; Kotaba, R.; Park, J.; et al. Wireless access for ultra-reliable low-latency communication: Principles and building blocks. IEEE Netw. 2018, 32, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Popovski, P. Ultra-reliable communication in 5G wireless systems. In Proceedings of the 1st International Conference on 5G for Ubiquitous Connectivity, Akaslompolo, Finland, 26–28 November 2014; pp. 146–151. [Google Scholar]
- Likas, A.; Vlassis, N.; Verbeek, J.J. The global k-means clustering algorithm. Pattern Recognit. 2003, 36, 451–461. [Google Scholar] [CrossRef] [Green Version]
- Hossain, A.; Pan, Z.; Saito, M.; Liu, J.; Shimamoto, S. Multiband Massive Channel Random Access in Ultra-Reliable Low-Latency Communication. IEEE Access 2020, 8, 81492–81505. [Google Scholar] [CrossRef]
- Hossain, A.; Pan, Z.; Saito, M.; Liu, J.; Shimamoto, S. Robotic Inner Signal Propagation and Random Access over Hybrid Access Scheme. Int. J. Comput. Netw. Commun. 2020, 12. [Google Scholar] [CrossRef]
- Tindell, K.; Hanssmon, H.; Wellings, A.J. Analysing Real-Time Communications: Controller Area Network (CAN). In RTSS; Citeseer: San Juan, PR, USA, 1994; pp. 259–263. [Google Scholar]
- CAN in Automation. Available online: https://www.can-cia.org (accessed on 21 April 2021).
- Huang, J.; Zhao, M.; Zhou, Y.; Xing, C.C. In-vehicle networking: Protocols, challenges, and solutions. IEEE Netw. 2018, 33, 92–98. [Google Scholar] [CrossRef]
- LIN Consortium. Available online: https://lin-cia.org (accessed on 23 April 2021).
- D’Orazio, L.; Visintainer, F.; Darin, M. Sensor networks on the car: State of the art and future challenges. In Proceedings of the IEEE 2011 Design, Automation & Test in Europe, Grenoble, France, 14–18 March 2011; pp. 1–6. [Google Scholar]
- Makowitz, R.; Temple, C. Flexray-a communication network for automotive control systems. In Proceedings of the 2006 IEEE International Workshop on Factory Communication Systems, Torino, Italy, 28–30 June 2006; pp. 207–212. [Google Scholar]
- Alparslan, O.; Arakawa, S.; Murata, M. Next Generation Intra-Vehicle Backbone Network Architectures. In Proceedings of the 2021 IEEE 22nd International Conference on High Performance Switching and Routing (HPSR), Paris, France, 7–10 June 2021; pp. 1–7. [Google Scholar]
- Rahman, M.A.; Ali, J.; Kabir, M.N.; Azad, S. A performance investigation on IoT enabled intra-vehicular wireless sensor networks. Int. J. Automot. Mech. Eng. 2017, 14, 3970–3984. [Google Scholar] [CrossRef]
- Rahman, M.A. Reliability analysis of ZigBee based intra-vehicle wireless sensor networks. In International Workshop on Communication Technologies for Vehicles; Springer: Cham, Switzerland, 2014; pp. 103–112. [Google Scholar]
- Liu, J.; Kato, N.; Ma, J.; Kadowaki, N. Device-to-device communication in LTE-advanced networks: A survey. IEEE Commun. Surv. Tutor. 2014, 17, 1923–1940. [Google Scholar] [CrossRef]
- Gomez, C.; Oller, J.; Paradells, J. Overview and evaluation of bluetooth low energy: An emerging low-power wireless technology. Sensors 2012, 12, 11734–11753. [Google Scholar] [CrossRef]
- Zhu, L.; Sun, S.; Menzel, W. Ultra-wideband (UWB) bandpass filters using multiple-mode resonator. IEEE Microw. Wirel. Components Lett. 2005, 15, 796–798. [Google Scholar]
- Kinney, P. Zigbee technology: Wireless control that simply works. In Proceedings of the Communications Design Conference, Boston, MA, USA, 13–16 October 2003; Volume 2, pp. 1–7. [Google Scholar]
- Iturri, P.L.; Aguirre, E.; Azpilicueta, L.; Garate, U.; Falcone, F. ZigBee radio channel analysis in a complex vehicular environment [wireless corner]. IEEE Antennas Propag. Mag. 2014, 56, 232–245. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected vehicles: Solutions and challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Holfeld, B.; Wieruch, D.; Wirth, T.; Thiele, L.; Ashraf, S.A.; Huschke, J.; Aktas, I.; Ansari, J. Wireless communication for factory automation: An opportunity for LTE and 5G systems. IEEE Commun. Mag. 2016, 54, 36–43. [Google Scholar] [CrossRef]
- Ganjalizadeh, M.; Di Marco, P.; Kronander, J.; Sachs, J.; Petrova, M. Impact of correlated failures in 5 g dual connectivity architectures for urllc applications. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Ratiu, O.; Panagiotopoulos, N.; Vos, S.; Puschita, E. Wireless transmission of sensor data over UWB in spacecraft payload networks. In Proceedings of the 2018 6th IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Huntsville, AL, USA, 11–13 December 2018; pp. 131–136. [Google Scholar]
- Iwabuchi, M.; Benjebbour, A.; Kishiyama, Y.; Ren, G.; Tang, C.; Tian, T.; Gu, L.; Cui, Y.; Takada, T. 5G Experimental Trials for Ultra-Reliable and Low Latency Communications Using New Frame Structure. IEICE Trans. Commun. 2018, E102, 381–390. [Google Scholar] [CrossRef]
- Voigtländer, F.; Ramadan, A.; Eichinger, J.; Grotepass, J.; Ganesan, K.; Canseco, F.D.; Pensky, D.; Knoll, A. 5G for the Factory of the Future: Wireless Communication in an Industrial Environment. arXiv 2019, arXiv:1904.01476. [Google Scholar]
- Jiang, X.; Pang, Z.; Zhan, M.; Dzung, D.; Luvisotto, M.; Fischione, C. Packet detection by a single OFDM symbol in URLLC for critical industrial control: A realistic study. IEEE J. Sel. Areas Commun. 2019, 37, 933–946. [Google Scholar] [CrossRef] [Green Version]
- Knapp, Á.; Wippelhauser, A.; Magyar, D.; Gódor, G. An Overview of Current and Future Vehicular Communication Technologies. Period. Polytech. Transp. Eng. 2020, 48, 341–348. [Google Scholar] [CrossRef]
- Islam, A.; Musavian, L.; Thomos, N. Performance Analysis of Vehicular Optical Camera Communications: Roadmap to uRLLC. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Yoshizawa, T.; Baskaran, S.B.M.; Kunz, A. Overview of 5g urllc system and security aspects in 3gpp. In Proceedings of the 2019 IEEE Conference on Standards for Communications and Networking (CSCN), Granada, Spain, 28–30 October 2019; pp. 1–5. [Google Scholar]
- Hossain, M.; Saitou, M.; Pan, Z.; Liu, J.; Shimamoto, S. Orthogonal frequency subcarrier-based multiple random access in ultra reliability and low latency communication. In Proceedings of the IEEE Workshop Cyber Phys. Netw. (CPN), Montreal, QC, Canada, 13 January 2020. [Google Scholar]
- Ji, H.; Park, S.; Yeo, J.; Kim, Y.; Lee, J.; Shim, B. Ultra-reliable and low-latency communications in 5G downlink: Physical layer aspects. IEEE Wirel. Commun. 2018, 25, 124–130. [Google Scholar] [CrossRef] [Green Version]
- Singh, B.; Tirkkonen, O.; Li, Z.; Uusitalo, M.A. Contention-based access for ultra-reliable low latency uplink transmissions. IEEE Wirel. Commun. Lett. 2017, 7, 182–185. [Google Scholar] [CrossRef] [Green Version]
- Siddiqi, M.A.; Yu, H.; Joung, J. 5G ultra-reliable low-latency communication implementation challenges and operational issues with IoT devices. Electronics 2019, 8, 981. [Google Scholar] [CrossRef] [Green Version]
- Choi, Y.J.; Park, S.; Bahk, S. Multichannel random access in OFDMA wireless networks. IEEE J. Sel. Areas Commun. 2006, 24, 603–613. [Google Scholar] [CrossRef]
- Sen, S.; Dorsey, D.J.; Guérin, R.; Chiang, M. Analysis of slotted ALOHA with multipacket messages in clustered surveillance networks. In Proceedings of the MILCOM 2012-2012 IEEE Military Communications Conference, Orlando, FL, USA, 29 October–1 November 2012; pp. 1–6. [Google Scholar]
- Popovski, P.; Stefanović, Č.; Nielsen, J.J.; De Carvalho, E.; Angjelichinoski, M.; Trillingsgaard, K.F.; Bana, A.S. Wireless access in ultra-reliable low-latency communication (URLLC). IEEE Trans. Commun. 2019, 67, 5783–5801. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhao, L.; Zheng, G.; Chu, X.; Ding, Z.; Chen, K.C. Resource allocation for open-loop ultra-reliable and low-latency uplink communications in vehicular networks. IEEE Trans. Veh. Technol. 2021, 70, 2590–2604. [Google Scholar] [CrossRef]
- Garg, D.; Narendra, N.C.; Tesfatsion, S. Heuristic and Reinforcement Learning Algorithms for Dynamic Service Placement on Mobile Edge Cloud. arXiv 2021, arXiv:2111.00240. [Google Scholar]
- Bala, D.; Islam, N.; Abdullah, I.; Hossain, M.A.; Alam, S. Analysis the Performance of OFDM Using BPSK, QPSK, 64-QAM, 128-QAM & 256-QAM Modulation Techniques. J. Electr. Eng. Electron. Control Comput. Sci. 2020, 7, 31–38. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Reis, S.; Pesch, D.; Wenning, B.L.; Kuhn, M. Empirical path loss model for 2.4 GHz IEEE 802.15. 4 wireless networks in compact cars. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Latency | Data Rate | Channel Bandwidth | Transmission Power |
|---|---|---|---|---|
| CAN [13] | 5 ms | 2.5 Mb/s | 50∼95 MHz | −50 dBm |
| Bluetooth LE [23] | 3 ms | 305 kb/s | 2 MHz | −20∼10 dBm |
| Ultra Wideband (UWB) [24] | Evolving | 53∼480 Mb/s | ≥500 MHz | −41.3 dBM |
| ZigBee [25] | 16 ms | 20∼250 kb/s | 2 MHz | −32 dBm |
| OFSMA [11] | 0.1 ms | 1 Mb/s | 10 KHz | −20 dBm |
| C-OFSMA | 0.2 ms | 1 Mb/s | 10 KHz | −20∼−5 dBm |
| Parameter | Value |
|---|---|
| General sensors | 90 |
| Subcarrier channels | 60∼560 |
| Audio Sensors | 4 |
| Video Sensors | 6 |
| Dedicated subcarrier channels | 10 |
| Carrier frequency | 5.9 GHz |
| Subcarrier bandwidth | 10 KHz |
| Packet size | 200 bits |
| Link speed | 1 Mbps |
| Modulation | BPSK |
| Packet duplication | 3, 5, and 7 |
| Arrival rate, | 100∼5000 pkt/s |
| Slot duration | 0.2 ms |
| Simulation time | 500 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shanto, M.A.H.; Binodon; Karmaker, A.; Reza, M.M.; Hossain, M.A. Cluster-Based Transmission Diversity Optimization in Ultra Reliable Low Latency Communication. Network 2022, 2, 168-189. https://doi.org/10.3390/network2010012
Shanto MAH, Binodon, Karmaker A, Reza MM, Hossain MA. Cluster-Based Transmission Diversity Optimization in Ultra Reliable Low Latency Communication. Network. 2022; 2(1):168-189. https://doi.org/10.3390/network2010012
Chicago/Turabian StyleShanto, Md. Amirul Hasan, Binodon, Amit Karmaker, Md. Mahfuz Reza, and Md. Abir Hossain. 2022. "Cluster-Based Transmission Diversity Optimization in Ultra Reliable Low Latency Communication" Network 2, no. 1: 168-189. https://doi.org/10.3390/network2010012
APA StyleShanto, M. A. H., Binodon, Karmaker, A., Reza, M. M., & Hossain, M. A. (2022). Cluster-Based Transmission Diversity Optimization in Ultra Reliable Low Latency Communication. Network, 2(1), 168-189. https://doi.org/10.3390/network2010012