1. Introduction
The study of the rigid body dates back to the XVIII century, with the pioneering works of Euler (1707–1783), who dedicated a large part of his life to study this problem, trying to explain and predict the motion of ships and their building (a historical review of Euler’s works on the rigid body are in the article by Marquina et al. [
1]). Around 1736, Euler published in two large volumes his treatise
Mechanica sive motus scientia analytice exposita (Mechanics or the science of motion, expounded analytically), where he proposes that the motion of a rigid body can be studied as two types of combined movements: one of translation around its center of gravity, and another of rotation of the body’s orientation around an axis that passes through its center of gravity. The most simple rotation problem is when there are no torques, the so called
Euler free rigid body or simply the
Euler top. In 1755, Segner showed that every rigid body has three main axes where the inertial tensor is diagonal. Then, in the series of works that Euler wrote between 1758 and 1765, which culminate in the voluminous compendium
Theoria motus corporum rigorumum seu solidorum, Euler used the principal axes system, and found the so-called
Euler equations and the
Euler angles. He obtained the kinematic relations for the motion of a heavy rigid body and addressed the integrable problem of the free rigid body, reducing it to quadratures. The angular momentum in the inertial frame is a constant of motion, but in the body-fix frame it satisfies the Euler equations.
A geometric construction of the solution to the Euler equations for the free rigid body was given by Luis Poinsot [
2] in 1851 using the
polhod and
herpolhod: the inertia ellipsoid with a fixed center rolls without slipping on a fixed plane perpendicular to the constant angular momentum; the position vector of the contact point is like an instantaneous axis of rotation, and draws polhodes on the ellipsoid of inertia, or herpolhodes on the fixed plane.
The general solution of the motion of a rigid body around a fixed point under no forces was probably first given by Rueb in 1834 [
3] in his PhD Thesis, and completed by Jacobi in 1849 [
4], who obtained the Euler angles in terms of elliptic functions and theta functions, and their expression in terms of Fourier series. Elliptic integrals had already appeared in the Elastica of Jakob Bernoulli, while Maclaurin, Fragano, Legendre and others used them in connection with the problem of rectifying an arc of an ellipse. Proceeding in analogy with the circular functions, Abel, Jacobi, Gauss and Weierstrass [
5] introduced the idea of inverting the elliptic integrals defining the elliptic functions. Carl Gauss noticed that the rigid body position may be uniquely determined by quaternions with unit norm, now known as the
Rodrigues–Hamilton parameters [
6].
Integrable cases of the rigid body were the first to be studied. Besides the free Euler top, just two integrable cases for the Euler equations with an additional global real integral are known: the Lagrange case (1788) [
7], a symmetrical top with the center of mass on the symmetry axis moving around a fixed point in a constant gravitational field, and the Kovalevskaya case (1888) [
8], a symmetrical top with
and the center of mass lying in the plane perpendicular to the symmetry axis. The Goryachev case (1900) [
9], a symmetrical top with
and the center of mass lying in the equatorial plane, has only particular integrals. It was integrated by Chaplygin in terms of hyperelliptic integrals [
10]. The Goryachev–Chaplygin case has a rational relationship with the three-body periodic Toda lattice [
11]. The additional integrals in the Euler and the Lagrange cases are related with natural physical quantities: the square of the angular momentum, and the projection of the angular momentum on the dynamical symmetry axis, respectively. The additional integral in the Kovalevskaya case is highly non-trivial: it was found a hundred years later than Lagrange’s case. The basic methods for finding first integrals from the symmetries and for studying the integrability are the separation of variables and the Noether’s theorem. A new qualitative frame to study integrability in finite dimensional Hamiltonian systems was shown by Arnold [
12,
13].
In his course on Celestial Mechanics, Andoyer (1926) [
14] used the two integrals of motion for the Euler and Lagrange integrable cases (the angular momentum and its projection into the
z body-axis) as convenient variables to study the rotational motions of the planets. Similar variables were introduced by Deprit [
15] in 1967, reducing the free rotor system to a conservative Hamiltonian system with one degree of freedom. The phase space has a pendulum-type dynamics. These variables are widely used in the perturbation theory of the rigid body.
Lagrangian and Hamiltonian structure of the rigid bodies can be studied with Euler angles, for instance, but many questions are easier to solve using the three Euler equations of motion for the angular velocity or the angular momentum. The dynamics of the rigid body has played a major role in the development of modern geometrical methods and theories of Lie groups and algebras [
16,
17]. The rigid body equations can be written in Hamiltonian form as a Lie-Poisson system associated to a Lie algebra structure in
. Different algebras can be chosen:
,
,
. The deformation through these algebras can be achieved defining
-linear combinations of the constants of motion (Casimir constants) [
18,
19], the energy and square of the body angular momentum. Under these linear transformations, the Euler equations of motion and the trajectories in
remain unchanged. Choosing the
-linear transformation properly [
18], the dynamics of a simple pendulum is obtained.
Separability in the Liouville sense became an important issue with the advent of quantum mechanics. Reiche [
20] opens a research path in this direction, showing that the classical kinetic energy of the free asymmetric Euler top is separable whenever the canonical momentum corresponding to the gyration angle around the direction of the constant angular momentum is zero; the intersection of the ellipsoid of energy
E and the sphere of angular momentum
can be parametrized in sphero-conical coordinates in terms of Jacobi elliptic functions. In these coordinates, the asymmetric free rigid body can be quantized, and the Schrödinger equation separated [
21,
22,
23,
24,
25,
26]. For more recent works on the rigid body see [
27,
28,
29,
30,
31,
32].
In this work, we study the trajectories of the solutions by eliminating the time as the independent variable in the autonomous Euler equations. It is convenient to use the dimensionless variables and independent parameters of asymmetry and energy-momentum, as in the references [
5,
19,
33], as these allow for a geometric study by means of continuous variations on the two independent parameters. We intended this work to be self-contained. In
Section 2, we write the Euler equations in dimensionless variables and dimensionless parameters, the
asymmetry parameter , and the
energy-momentum parameter . In these variables, the “energy surface” becomes generically a
hyperboloid. The geometry of the hyperboloids depends on both parameters
and
. The asymmetry parameter
fully specifies the values of the three dimensionless
inertia parameters ,
,
, which divide the space of parameters into six regions; for a given
, the geometry of the hyperboloid depends on the relative values of
and the inertia parameters, as expected. Special cases take place when the value of
is on the boundary of these regions, i.e.,
for some
.
In
Section 3, we use cylindrical coordinates and eliminate the time as an independent variable in the autonomous Euler equations to obtain the equation of the trajectory in a two-dimensional configuration space, with non-autonomous differential equations, which are solved explicitly in terms of trigonometric functions of the cylindric angle
. Of course, the solutions depend on where in the six regions, or their boundaries, the values of
and
parameters lie. We give the time-independent trajectory solution as a function of the two continuous parameters. Continuously changing the values of
and
, we obtain all the solutions for the trajectory and the geometry of the hyperboloid of energy for all the possible cases of symmetries and asymmetries of the rigid body.
In
Section 4, the solutions are studied as limit cases of
Section 3, at the boundary of the six open regions. They are the separatrices of different kinds of solutions, which are changing their symmetry axis. In
Section 5, the conclusions are summarized.
2. The Euler Equations
To study the rotational motion of a torque free rigid body, we assume that the body’s center of mass is fixed at the origin of an inertial frame. The Newton equations are
where
is the torque, and
the angular momentum of the rigid body in the inertial frame. If
,
becomes a constant of motion. These vectors in the body-fix reference frame are denoted by
and
, respectively, and they are related by an orthogonal rotation matrix
, such that
and
. Writing the Equation (
1) in the body frame, we have the
Euler equations
where
is the pseudovector
angular velocity, such that
for all vectors
in the body frame. This equation gives the velocity due to the rotation of a point in
.
If the torque vanishes, either because the motion is free of external forces, or because the rigid body is in a constant field and the origin of the non-inertial frame is the body’s center of mass, then and we are dealing with the rigid body torque free system with two integrals of motion: the energy E and the angular momentum (then constant).
In this case, the free Euler equations are given by
Since
with
the matrix of moment of inertia, the Euler equations for the torque free rigid body can be written either as
or
For tensor
to be diagonal, we choose the axes of the body frame in the direction of the principal axes system. The special case with spherical symmetry
has the solution
, and the rotation matrix
is also constant.
The kinetic energy
E and the square of the angular momentum
are given in terms of the moments of inertia and the components of
:
Geometrically, the equation for the conservation of the energy generically defines an ellipsoid with semi-axes
,
and
, whereas the equation for the conservation of the modulus of the angular momentum defines a sphere of radius
. If a solution exists, the radius of the sphere must have a value between the minimum and maximum values of the semi-axes of the ellipsoid
When the vector moves relative to the top’s principal axes of inertia, it lies along the curve of the intersection of the surfaces and . Since the paths are closed, the motion of with respect to the body system must be periodic, describing some conical surface and returning to its original position.
To introduce the dimensionless variables [
19,
33], let
be in the unitary vector in the direction of the angular momentum
, with the equation of motion
If the tensor
is written in terms of its irreducible representations (its trace and a traceless symmetric matrix) [
19]
where
A and
T have dimensions of the inverse of the momentum of inertia
the
inertia parameters here defined are dimensionless. We find that
and then the trace of the dimensionless matrix
is canceled
Computing the trace of the square of the matrix
, we have
and if we take
then
In order that
and
be well defined, from (
11) we see that the rigid body cannot be completely symmetric; in what follows we exclude this case, but the symmetric case with only two equal moments of inertia is included in our discussion. The inertia parameters turn out to be convenient because they are bounded and satisfy the equations
In the three dimensional space of inertia parameters, these equations define a plane going through the origin, and a sphere with its center at the origin and radius
, respectively. The main difference between the dimensionless inertia parameters
and the inverse moments of inertia
is that the
parameters can be positive, negative or zero, while the
are always positive reals. However, the equations of motion and their solutions rely only on the differences of the inertia parameters
and, subsequently, on the differences
as per Equation (
10). Furthermore, since the sum of the inertia parameters must be zero, two of them must possess opposite signs, while the third one can have any sign, including perhaps being zero. Notice that if one inertia parameter is smaller than another, like
, it means that their moments of inertia are in the opposite order
, because
is related to
.
According to the conditions (
12), only one parameter is needed to determine the three inertia parameters, named the
asymmetry parameter such that
The angle
parametrizes the circle defined by the intersection of the plane and the sphere in the Equation (
12). A third equation also holds,
, related with the third invariant (the determinant) of the characteristic polynomial of the inverse inertia matrix, see [
19] for more details.
The dimensionless parameter
associated with the energy and the square of the angular momentum is defined analogously to (
10)
and is called the dimensionless
energy-momentum parameter or shortly the
energy parameter, although it depends on both energy and the squared of the angular momentum.
The conservation of energy (
5) and angular momentum (6) in the new dimensionless variables have been transformed into
and the Euler Equation (
8) results in
. Finally, the dimensionless time is defined by
in order to obtain the equations
From now on, a dot will denote the derivative with respect to the dimensionless time
These are the
dimensionless Euler equations: all the variables
, “time”
and inertia parameters
are dimensionless, as well as the energy-momentum
, Equation (
14). The surface (
15) does not correspond to the energy ellipsoid (
5), but they are related through the transformation (
14). This is why in the new parameters
,
,
that satisfy (
12) do not define an ellipsoid but a hyperboloid. Abusing the language, we call
the energy parameter (which also involves the square of the angular momentum), and the equation
is called the energy level.
For any value of , at least one of the inertia parameters is positive and another is negative . The third one may be either positive, negative or zero. For instance, if , the inertia parameters satisfy (with , , and either positive, negative or zero), and the moments of inertia are in the opposite ordering , with because we assume that the rigid body has no spherical symmetry.
In particular, when the asymmetry parameter is a multiple of
, mod(
)
some
have an extremal value and the rigid body is symmetric, with two equal inertia parameters. Likewise, when the asymmetry parameter is an odd multiple of
, mod(
)
the rigid body is the most asymmetric one: one inertia parameter is zero, and the other two inertia parameters have the same absolute value but opposite signs.
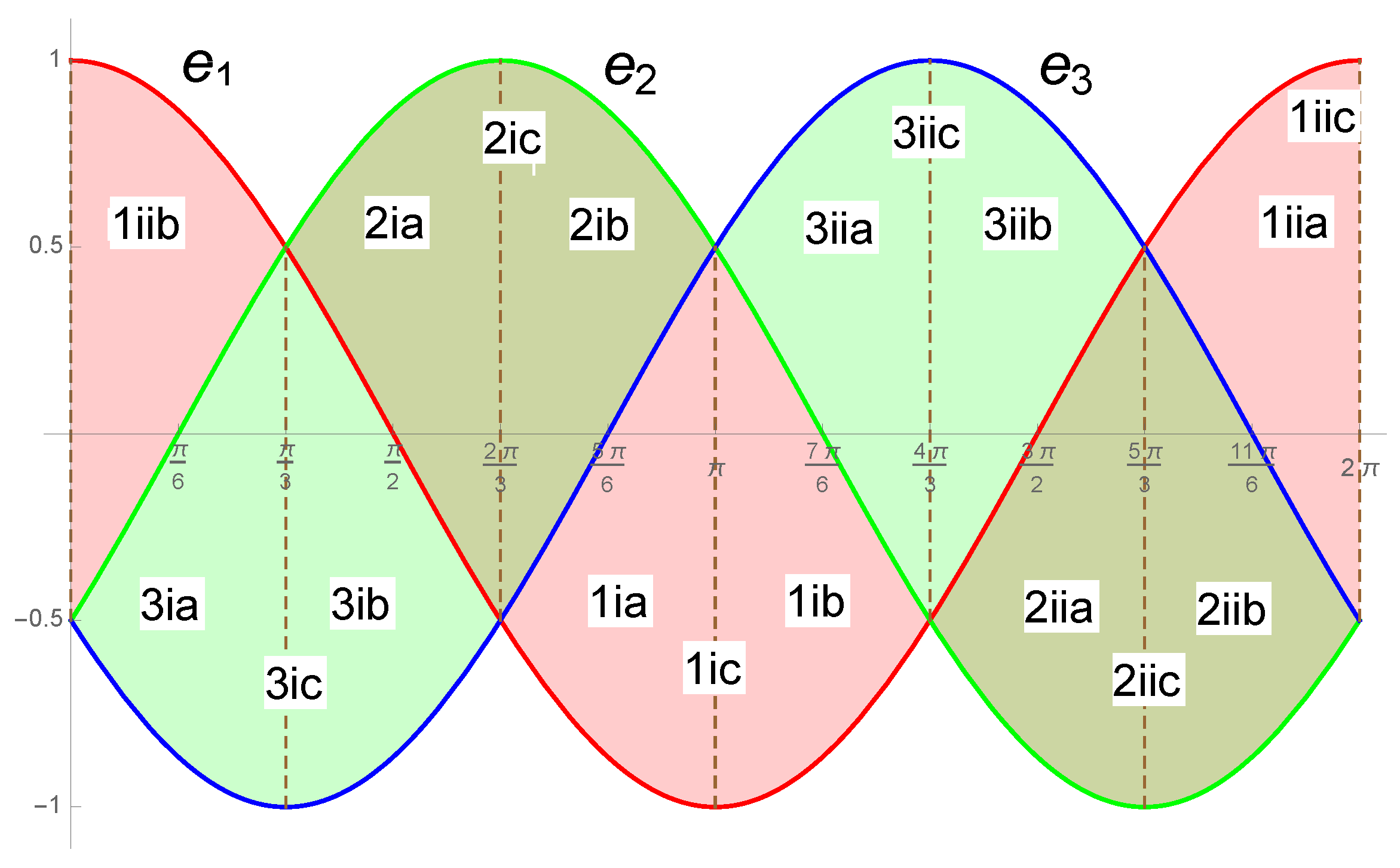
Figure 1 shows the inertia parameters as a function of
.
These special values of
split the interval
in twelve disjoint open subintervals. For the values of
, we can continuously cover all the possible
asymmetries of the rigid body: symmetrical top (
) and asymmetrical top (
, including the most asymmetrical tops
), with all the possible ordering of the
’s parameters, as it is shown in the
Figure 1; of course, instead of the inverse inertia matrix
, we are using the dimensionless matrix
.
The transition from three real inertia moments to a single asymmetry parameter and the conversion of the ratio into the energy-momentum parameter have allowed us to reduce all case studies to only two bounded independent parameters, namely and . For taking continuous values within its domain , we naturally obtain the six possible permutations of the three inertia parameters, ranging from symmetric rigid bodies (treated as subsections (c) in all the studied cases, where is a multiple of ), and notably, to the most asymmetric cases (when one inertia parameter vanishes, if is an odd multiple of ).
Special cases take place when the rigid body has cylindric symmetry,
. If
for
in the set
, from (
17) we obtain
as constant and
where
, and the solution is given in terms of circular functions.
The surface of energy (
15) and angular momentum (16) define the level surfaces
The sphere of angular momentum (21) is a unitary sphere, and the level surface (
20), is generically an elliptic hyperboloid instead of the original ellipsoid (
5), because at least one inertia parameter is positive and another is negative. Remember that the name
energy surface is used for simplicity, and
depends also on the square of the angular momentum, see Equation (
14). The solution to the dimensionless Euler equation lives at the intersection
.
The condition for the intersection between the sphere of angular momentum and the original ellipsoid of energy (
7) becomes in these parameters the intersection of the hyperboloid (
20) and the unitary sphere (21), with the condition
When
or
, the hyperboloid and the unitary sphere are tangent at only two points.
The geometry of the energy surface (
20) depends on the values of
and
. We have two cases:
- I.
. The energy surface
has the equation
which is either a hyperboloid or a cylinder, depending on the value of the asymmetry parameter:
- (i)
. This is the generic case. All the coefficients in (
23) are not zero, and
- -
If two coefficients are positive, and the other one is negative, let us say , then is an elliptic hyperboloid of one sheet around the axis .
- -
If two coefficients are negative, and the other one is positive, let us say , then is an elliptic hyperboloid of two sheets around the axis .
That two coefficients in (
23) are positive or negative depends on the sign
and on the intermediate inertia parameter, because the other two always have opposite signs.
- (ii)
and two inertia parameters are equal. All the coefficients in (
23) are not zero, and
- -
If two coefficients have the same positive value, and the other one is negative, let us say , then is a hyperboloid of revolution of one sheet around the axis .
- -
If two coefficients have the same negative value, and the other one is positive, let us say , then is a hyperboloid of revolution of two sheets around the axis .
- (iii)
. A coefficient is zero, let us say , and the other two have the same absolute value but opposite signs. This is a hyperbolic cylinder with cylindrical axis .
- II.
. The energy surface
has the equation
which is either a cone or two intersecting planes, depending on the value of the asymmetry parameter:
- (i)
. All the coefficients in (
24) are not zero. If two coefficients have the same sign, and the other the opposite one, let us say
.
is an elliptic cone around the axis
.
- (ii)
. All the coefficients in (
24) are not zero: two coefficients have the same value and sign, and the other has the opposite sign, let us say
, then
is a circular cone around the axis
.
- (iii)
. Then some inertia parameter vanishes, let us say , and are two planes intersecting along the axis.
The solution of (
17) for asymmetric rigid bodies is well known in terms of elliptic Jacobi functions, see for instance [
33,
34], and they live at the intersection of the unitary sphere (6) and the hyperboloid of energy (
5).
In the next section, we will take a different approach. We will explicitly find the trajectory equation as the solution to the Euler equations in a reduced two-dimensional space, where the solution depends on trigonometric functions of a cylindric angle . The geometry of the solutions is related with the hyperboloids previously characterized in terms of the asymmetry parameter and the energy parameter .
3. The Explicit Solution for the Trajectory Equation
We write the dimensionless Euler Equation (
17) in the abbreviated form
where the coefficients
a,
b and
c are the differences between the inertia parameters, which satisfies
and can be written in different ways
We expect these differences of inertia parameters to be present in the solution.
We will introduce cylindrical coordinates for distinguish three possible cases depending on the symmetry axis of the cylindrical coordinates. Then we will solve the Euler Equation (
17) eliminating the time
to find the trajectory equation parametrized with a cylindric angle
. In what follows, we assume
.
In
Figure 1, a summary of all the cases and subcases is shown.
Equation (
25) become
Note that
and we have the first integral
where
, which is the conservation of the norm of the angular momentum given in (21)
To solve the equations of motion (
30), we change to the independent variable
, reducing the differential system in one dimension
These are the trajectory differential equations in the independent variable
. Now the system is non-autonomous in a reduced two-dimensional space
. In order that these equations be well defined, the denominators of (
32) and (33) must be different from zero for all
. We assume that
and also
by (
31). Critical points take place when
at the points
and they will be studied in the next section. The condition
implies that
which means that
is the smallest or the greatest of the three inertia parameters.
The differential Equation (
32) is separated and can be integrated explicitly. Once we have
, we can substitute it into Equation (33) and solve it explicitly, or we use the first integral (
31) to obtain
. Integrating (
32) we have
and for
where
, the other first integral, depends on the initial conditions. Factor 2 is convenient as will be seen ahead.
The solutions
and
are well defined if (
34) is satisfied, and they are periodic functions with period
. The factor 2 in the argument of the cosine function is due to the invariance of the solution under
,
. In other words, the two points
and
are on the same solution.
The first integral
can be easily calculated, and it must be consistent with (
20). From (
35) and (
29), we have
and using the definitions of
b and
c, (27) and (28), and the first integral (
31) we obtain
then
which is the hyperboloid of energy (
20). Then,
H and the energy parameter
are related by
We want to relate the first integral
H with the values of
and
. If we denote
and
, from (
35) with
we have
In this way, we have that the distances to the cylindrical axis along
and
are
respectively, where
and
. Thus, we have the relations
From (
34), we consider the following two cases.
- (i)
If
and
, then
and
is the smallest inertia parameter. The denominators of (
39) are positive, and for
we obtain
so that
is less than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
and the body is symmetric such that
- (ii)
If
and
, then
and
is the greatest inertia parameter. The denominators of (
39) are negative, and for
we obtain
so that
is greater than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
and the body is symmetric satisfying
These cases and conditions on
and
are shown in the
Figure 1 as 1ia, 1ib, 1ic and 1iia, 1iib, 1iic.
As
and
, the solutions (
35) and (
36) in terms of the inertia and energy parameters are
where
satisfies (
40) or (
41). As a function of the asymmetry parameter
, Equation (
13) yields
and
which only depend on the two constant parameters
and
.
In the special symmetric case (1
i c) with
, the solutions are reduced to
which are two circles perpendicular to the
axis with the center at
and radio
r. In the case (1
ii c) with
, the corresponding values are
Finally, from (
38) and (
29) at
and
, the trajectory crosses the planes
and
, at the points
respectively, such that either (
40) or (
41) is satisfied.
The Euler Equation (
25) becomes
Now
gives the first integral
where
, which is the conservation of the norm of the angular momentum (21), i.e.,
The differential system with the independent variable
becomes
In order that these equations be well defined, the denominators of (
46) and (47) must be different from zero for all
. We assume that
and also
by (
45). When
, there are two critical points
; they will be studied in the next section. The condition
implies
thus
is the smallest or the greatest of the three inertia parameters.
The differential Equation (
46) can be integrated explicitly, and with the first integral (
45) we obtain
the other first integral being
H. The solution is invariant under
, so the points
and
belong to the same solution.
Following the same steps as in Case 1, we obtain analogous results with the corresponding permuted indices. For
H, we obtain
and denoting
and
, we have
therefore the square distances to the cylindrical axis
along
and
are given by
respectively, where
and
. Then,
We have two cases
- (i)
If
and
, then
, and
is the greatest inertia parameter for all this interval of
. The denominators in (
52) are negative, and for
we obtain
so that
is greater than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
and the body is symmetric and
- (ii)
If
and
, then
, and
is the smallest inertia parameter in all this interval of
. The denominators of (
52) are positive, and for
we obtain
so that
is smaller than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
and the body is symmetric and
These cases and conditions on
and
are shown in the
Figure 1 as 2ia, 2ib, 2ic and 2iia, 2iib, and 2iic.
As
and
, the solutions (
49) and (50) in terms of the inertia and energy parameters are
such that
satisfies (
53) or (
54). With (
13), the previous solutions can be written in terms of only two parameters
and
.
In the two symmetrical cases (2
i c) and (2
ii c), the solutions (
55) and are reduced, respectively, to
and
which are circles perpendicular to the
axis with center at
and radio
r.
Finally, from (
51) and (
44) at
and
, the solution crosses the planes
and
at the points
respectively, and either (
53) or (
54) is satisfied.
The Euler Equation (
25) becomes
Since
, we have the integral of the norm
and the differential system with the independent variable
is
Analogously to the previous cases, we assume that
and
by (
57).
The two critical points take place when
at
. They will be studied in the next section. The condition
means
which implies that
is the smallest or the greatest of the three inertia parameters.
The Equation (
58) is separable, and we obtain
and
Both are well defined if (
59) is satisfied. For
H in this case, we obtain
If
and
, we have
then
with
and
. Therefore
and
We have the following two cases:
- (i)
If
and
, then
and
is the smallest inertia parameter for all this interval of
. The denominators in (
63) are positive, and for
we obtain
so that
is smaller than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
. The rigid body is symmetric with
- (ii)
If
and
, then
, and
is the greatest inertia parameter for all this interval of
. The denominators in (
63) are negative, and for
we have
so that
is greater than both
and
in all the interval
, and if
- (a)
then , .
- (b)
then , .
- (c)
then
and the rigid body is symmetric with
These cases and conditions on
and
are shown in the
Figure 1 as 3ia, 3ib, 3ic and 3iia, 3iib, 3iic.
As
and
, the solutions (
60) and (
61) become
where
satisfies (
64) or (
65). With (
13), the previous equations can be written in terms of
,
and of course
.
In the two special symmetrical cases (3
i c) and (3
ii c), the solutions (
66) are reduced to
and
respectively. They are circles perpendicular to the
axis with the center at
and radio
r.
Finally, from (
62) and (
56) at
and
, the trajectory crosses the planes
and
at the points
respectively, and either (
64) or (
65) is satisfied.
We have seen that each case has two open disjointed intervals of
(subcases (i) and (ii)), and that the parameter space is divided in six regions where the periodic solutions were found, depending on the value of
. In
Figure 1, we summarize the studied cases. A file
Free Rigid Body can be downloaded where the solutions at the intersection of the sphere and hyperboloid can be seen as a function of
and
; it requires free CDF Wolfram Player.
The boundary of these regions are the special cases where for some . We study these special cases in the next section.
It must be clear from the previous discussion that the axis of the hyperboloid
, which changes at the values
(
19), may not be the same as the axis of the cylindrical coordinates used to write the solution, summarized in
Figure 1. For instance, for negative
and
(cases (1ia–c)), when
,
is a one sheet hyperboloid with axis
, but the solution has the cylindrical axis
(case (1ia)). For
,
is a two sheet hyperboloid with axis
, and the solution has the same cylindrical axis
(cases (1ia–c)). For
,
is a one sheet hyperboloid with axis
, but the solution has the cylindrical axis
(case (1ib)).
Finally, with the division into six disjoint regions based on the symmetry axis of the cylindrical coordinates to obtain the solutions, we can see that the values of and are related to the solutions found in each case. The cylindrical symmetry axes where the solutions were calculated coincide with the axes of the larger or smaller inertia parameters, never with the intermediate one. For each value of , there is always an intermediate inertia parameter, which we will refer to as , and two extremes, denoted as . If the energy parameter satisfies , then the solution is expressed in cylindrical coordinates with the cylindrical axis in the direction of . Conversely, if the energy parameter satisfies , then the solution is expressed in cylindrical coordinates with the cylindrical axis in the direction of . In the symmetric cases, there are two equal inertia parameters, let us say . In this scenario, the different inertia parameter satisfies either or . These symmetric cases allow the exchange of the cylindrical axis in the i and j directions for the calculated solution: a parameter that was intermediate for slightly lower than the value of the symmetric case (), becomes extreme for slightly greater than in the symmetric case (), and the other one that was extreme becomes intermediate. Of course, the third parameter remains extreme. However, the axis of the cylindrical coordinates for the solution may not necessarily correspond with the axis of the hyperboloid, as we mentioned earlier.
4. The Separatrices
Now we consider the cases in which
takes the value of an inertia parameter
at the boundary of the regions studied in the previous section. The most simple cases are those in which
because the solution reduces to two points. This is confirmed by calculating the limit of the solutions previously found, (
42), (
55) and (
66), when the numerator goes to zero. For instance, in Case 1, we saw that
has the smallest or the greatest value of the three inertia parameters, and from (
42), if
, then
and
. These are two points on the
axis, where the two surfaces (
20) and (21) are tangent, as it is expected.
However, in the limit when
tends to the inertia parameter with the intermediate value (for a given
), the solutions are the separatrix sets given by four semicircles (they are open sets). To see this we substitute the value of
in (
42), (
55) and (
66) (Cases 1, 2 and 3, respectively), to the intermediate value of the inertia parameter, as it is indicated in the second column of the next tables.
| Case 1 |
| (i a) | , , |
| (ii a) |
| (i b) | , , |
| (ii b) |
| (i c) | , |
| (ii c) |
| Case 2 |
| (i a) | , , |
| (ii a) | |
| (i b) | , , |
| (ii b) | |
| (i c) | , |
| (ii c) |
| Case 3 |
| (i a) | , , |
| (ii a) | |
| (i b) | , , |
| (ii b) | |
| (i c) | , |
| (ii c) |
In general, assuming that the intermediate value of the inertia parameters is
, and their ordering is
,
in the set
, if
, the solutions are four open semicircles whose boundary points are on opposite sides of the
axis. The intersection of the hyperboloid (
20) and the unit sphere (21) are two big circles, where the four semicircles lie.
Since the separatrix solution is at the boundary of the two different cases, it can be obtained indistinctly from either of them, as the locus of both solutions coincides, although the domain of is different. For instance, solutions (1ia) are the same locus than (2ib), and (1iia) are the same locus than (2iib), although they come from different limits and symmetry axes. The domain of (1ia) and (1iia) is and of the second one is .



{kind=link}