
Potential Assessment of Electrified Heavy-Duty Trailers Based on the Methods Developed for EU Legislation (VECTO Trailer)


Abstract
1. Introduction
2. Implementing Regulation (EU) 2022/1362 and VECTO Trailer
- Pe: Mechanical power demand on the ICE of the towing vehicle [W]
- Pair: Air resistance [W]
- PRoll: Rolling resistance [W]
- PAcc: Acceleration resistance [W]
- PGrd: Gradient resistance [W]
- PLoss: Power losses in the powertrain [W]
- PAux: Power demand due to auxiliary systems [W]
- Curb weight of the trailer: In the case of refrigerated trailers, this also includes the TRU (Transport Refrigeration Unit).
- Main external dimensions: These are used to calculate the air drag of the basic configuration of generic towing vehicle and trailer.
- Standard or specific aerodynamic devices: The former have fixed air drag reductions compared with the basic configuration, depending on the trailer type, while the effect of the latter is to be assessed using a certified CFD (Computational Fluid Dynamics) method.
- Axle and tire features: These include the declaration of whether an axle is liftable and/or steered as well as the rolling resistance, determined on a drum test rig, as set out in Regulation (EU) 2020/740 [11].
3. Current Developments in VECTO Trailer
3.1. E-Trailer Working Principles and Consideration in a Regulatory Simulation Approach
- Robustness of the approach
- ○
- Inputs to the tool need to be generally describable in the technical annexes.
- ○
- Parameterization effort shall be as low as possible, as a simulation needs to be carried out individually for each vehicle as part of the vehicle approval.
- ○
- Generic data, assumptions, and model functions cannot be individually adapted for specific vehicles.
- There is no possibility to incorporate manufacturer-specific control algorithms into the simulations, e.g., via software or hardware in-the-loop methods (see conclusions from Task 5 in the project “Further development and update of VECTO with new technologies” [13]).
- At the time of calculation, no data on the specific use of the vehicle (e.g., charging behavior by the vehicle operator) is available.
- For the evaluation of the performance e-trailer in the context of the HDV CO2 standards, the results need to be consolidated into very few parameters.
- Fuel consumption of 2.5 [L/h] for a Diesel–electric TRU (current standard TRU technology).
- Electrical energy consumption of 5 [kW] for pure electric TRU.
- Brake blending:
- ○
- Description: A feature of an e-trailer applying electric regenerative braking in driving conditions where a braking request is sent from the towing vehicle to the trailer.
- ○
- Proposed generic modeling: The feature is considered by splitting the service brake power (total brake power minus endurance brake power on the towing vehicle) between the towing vehicle and trailer based on the vertical wheel force distribution. The amount of service brake actuation required by the trailer is then covered as much as possible by the e-axle, considering the torque limitations of the e-components.
- Free recuperation:
- ○
- Description: A feature that applies electric regenerative braking in driving conditions where the trailer is pushing but no braking request is made by the towing vehicle. The feature has the primary goal of using braking energy for electric recuperation that would otherwise be dissipated by the endurance brake on the towing vehicle. For this feature to work properly, the control algorithm on the e-trailer must be able to estimate the driving status of the entire vehicle very well—and, in particular, whether the endurance brake on the towing vehicle is currently active. Information of this kind is not yet included as standard in the communication protocols between the towing vehicle and trailer. In reality, active “free recuperation” results in a complex interaction between the brake control of the e-trailer and the tractor unit.
- ○
- Proposed generic modeling: Such iterative controls cannot be modeled in detail in VECTO Trailer due to it being a “backwards” calculation model in its core. Hence, the feature is proposed to be considered in a simplified way by shifting a fixed percentage of the endurance brake power to the e-trailer, considering the full load capabilities of the e-components as well as an optional power limit, which can be defined by the manufacturer.
- Dynamo mode:
- ○
- Description: An operation mode of an e-trailer in which the e-axle applies electric braking to supply the vehicle with electrical energy (e.g., for supply of a refrigeration unit) and/or to increase the state of charge (SOC) of the battery predominantly or exclusively in driving situations where the vehicle is pulling the trailer. This e-trailer operation mode induces additional CO2 emissions on an ICE towing vehicle. Nevertheless, this mode is necessary to ensure cooling safety of refrigerated trailers with electric TRUs in case there is not sufficient electrical energy available from the battery (plug-in charged from the grid) and from CO2-free regenerative electric braking.
- ○
- The relevance of the dynamo mode lies in the fact that, for each kWh of electrical energy generated, the additional CO2 emissions emitted by the ICE on the towing vehicle are significantly lower compared with those produced by a Diesel–electric generator on conventional refrigerated trailers. As a rough approximation, it can be said that around 10% of the total emissions from a classic articulated truck with a refrigerated trailer come from a typical Diesel–electric TRU. If the electricity for the electric compressor is not generated by the small Diesel generator on the refrigerated trailer, but by the e-trailer in dynamo mode, the attributable CO2 emissions are reduced by half, mainly due to the significantly higher efficiency of the Diesel ICE on the towing vehicle.
- ○
- Proposed generic modeling: In the model, this mode is essentially taken into account by applying a generically defined braking power (e.g., 20 kW, speed-dependent, with full load limitations from component and/or manufacturer side considered).
- Propulsion support:
- ○
- Description: An operation mode of an e-trailer in which the overall propulsion of the vehicle is supported by the application of motive power by the trailer. A key boundary condition in this respect is that, in accordance with the provisions currently discussed in the related UN Regulation No. 13 [18] working group, an e-trailer in propulsion mode must not push the towing vehicle. The working group is tasked with establishing boundary conditions, limitations, and provisions for the application of specific e-trailer functionalities. As this work is still in progress, no citable version of the corresponding regulation is currently available including these e-trailer provisions. Beyond the prerequisite to not push the towing vehicle, many different control strategies may be followed by manufacturers linked to basic design layout features (maximum power of the e-axle and battery capacity) as well as basic control features (like direct sensing of the coupling force and/or indirect estimation of the driving state using, e.g., speed and acceleration sensors).
- ○
- Proposed generic modeling: The proposed generic modeling of this mode follows the main principle that the trailer provides as much of its own propulsion as possible up to the point where the trailer still is not pushing the towing vehicle. This is handled in the longitudinal dynamics simulation by calculating the force at the coupling point and controlling the e-axle actuation accordingly, taking into account the torque and speed limitations of the components. In real-life use, the effect of e-trailer propulsion on overall energy consumption is also determined by the limits of the electrical energy required for propulsion (i.e., essentially by the battery capacity). This effect is modeled by simulating the vehicle combination in two different modes (battery full and battery empty, see explanation in Section 4.1).
- Energy supply to TRU: Supplying an electrically driven TRU is the key function of passive e-trailers currently available on the market. However, active e-trailers can of course also be configured as reefers.
- BEV range extension: For e-trailers with propulsion capabilities, a dedicated application scenario is to serve as a range extender for BEVs (battery-electric towing vehicles) by taking over part of the propulsion work. In this respect, VECTO Trailer is also intended to simulate active e-trailers in combination with a generic BEV towing vehicle, providing an estimate of the extended electric range enabled by the e-trailer.
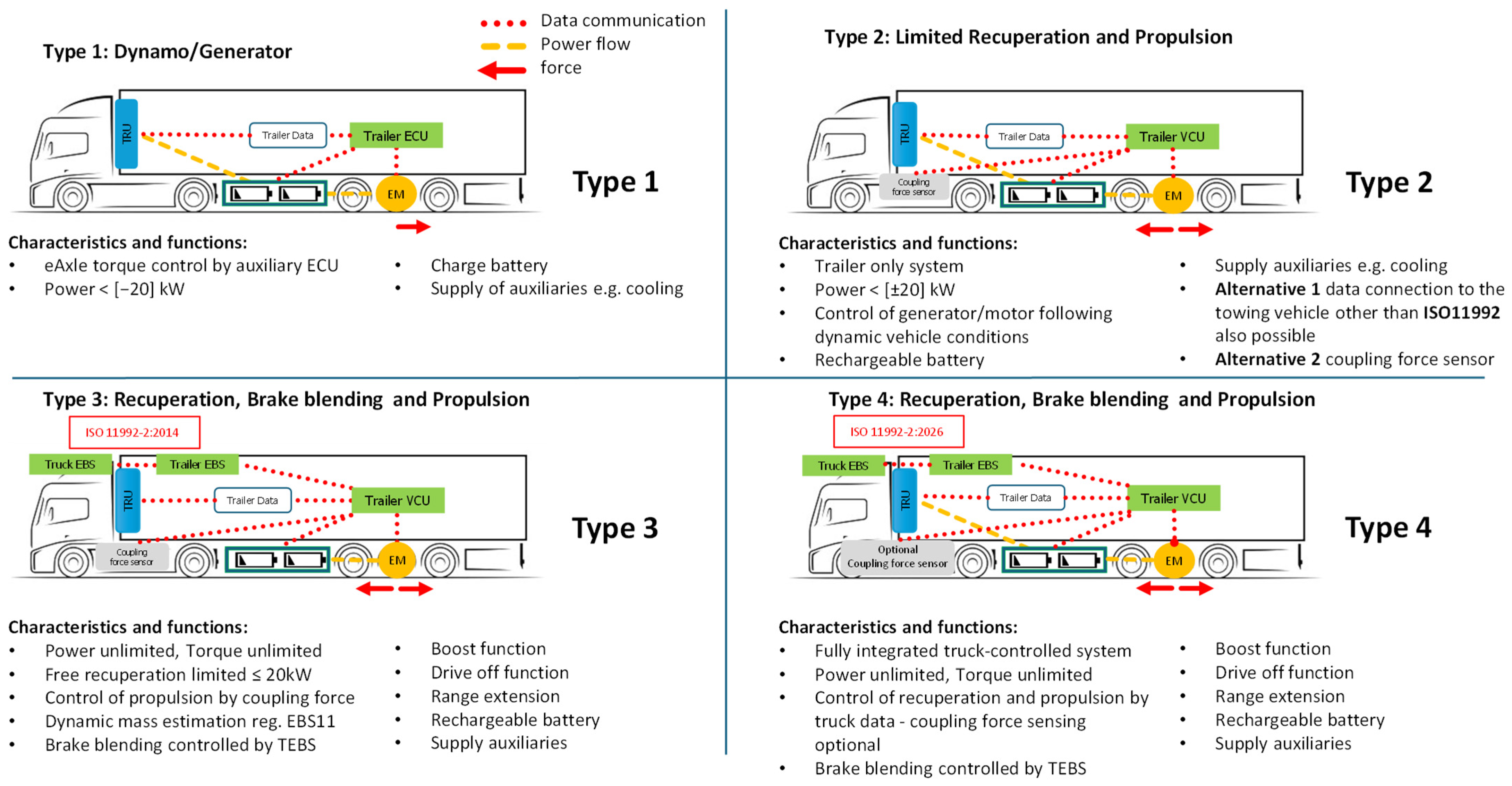
3.2. Type Classification as Discussed in UN Regulation No. 13
- It can assist in propulsion in certain conditions.
- It can include more sophisticated controls regarding the generation of electrical energy (free recuperation).
- An ISO 11992-2:2014 [19] interface for connection of the e-trailer with the EBS (Electronic Braking System).
- Sensors on the trailer to detect the driving state, which can be done directly and/or indirectly, as described in the previous section.
- Power ratings of the e-axle(s).
- The capacity of the battery for the “plug-in” effect.
- The controls (sensors and algorithms).
- A future ISO 11992-2:2026 interface for exchange of torque requests.
- Algorithms on the towing vehicle to optimize the complete vehicle combination like
- ○
- ICE towing vehicle and e-trailer with energy optimization as for an HEV.
- ○
- BEV towing vehicle and e-trailer with efficiency and SOC optimizations (e.g., shifting of electric braking between towing vehicle and trailer based on the actual demands).
4. E-Trailer Reduction Potential Estimation
4.1. Basic Approach for Modeling the Different Operating Modes of an E-Trailer
- Propulsion support function = ON
- Regenerative braking = ON
- Electric refrigeration unit = ON
- Dynamo mode = OFF
- The SOC is “artificially” kept constant in the simulation, in the middle of the usable SOC range (“center SOC”). This is done to guarantee each vehicle being able to drive the complete cycle independent of its electric-storage capacity. This ensures the comparability of the results for electrical energy consumption and ranges between all possible vehicle configurations. Otherwise, vehicles with a small battery would not be able to run the full cycle. Thus, the cycle specification implicitly depicted in the result would not be representative. Furthermore, the constant SOC in the middle of the usable SOC range is representing the best guess for average real-world usage since there is no explicit correlation between actual SOC level and distance in the VECTO mission profiles available (i.e., location of typical charging points in the mission).
- The electrical energy consumed in the cycle is accumulated in a separate counter independent of the virtually constant SOC.
- UF: Utility factor [-]
- Daily distance CD: Daily distance driven in CD mode [km]
- Daily distance Total: Total daily driven distance [km]
- Eel,usable: Total usable electrical energy during the daily mission [kWh]
- ECel,CD: Kilometer-specific electrical energy consumption as simulated for the CD mode [kWh/km]
- Usable SOC range: Since real-world SOC usage is typically limited to reduce battery aging and is difficult to verify, e.g., by a type approval authority, a generic default of 80% usable SOC is proposed, derived from discussions with e-trailer manufacturers. Only lower values may be indicated in the VECTO Trailer input; values above 80% are not permitted.
- Battery aging deterioration: In line with the Commission’s approach, VECTO should reflect battery status at midlife, requiring consideration of capacity deterioration. While UN GTR No. 22 is developing methods to assess battery degradation, these currently apply only to towing vehicles. As no definitions or verification methods exist yet for e-trailers, a generic 10% capacity reduction is proposed for modeling. However, since e-trailers have recently been added to the GTR’s scope, specific values may be used in VECTO Trailer once relevant methods are finalized and adopted.
- Assumptions on the typical charging pattern:
- ○
- The battery is assumed to be fully charged at the start of the daily trip. Electric cooling systems on reefers require overnight grid connection, making 100% battery charge at trip start a reasonable assumption. Differentiating between reefer and non-reefer e-trailers would introduce complexity and unjustified differences in comparisons given the currently available data limitations.
- ○
- No intermediate charging is considered during the mission. During the mission, especially in long-haul operations, interim charging often could take place only at public charging infrastructure. There, it is assumed that charging the towing vehicle has priority.
- A key operational factor for refrigerated e-trailers is maintaining a battery reserve to ensure cooling during standstill periods without grid access—critical for trailers without an ICE genset as emergency backup. This reserve triggers a switch from battery to dynamo mode, which functions only while the vehicle is moving and is ineffective during standstills like traffic jams or on parking spaces without e-infrastructure. As reported by manufacturers, operators can choose SOC-based switchover thresholds to manage this reserve. If these operational patterns are not considered, CO2 savings, especially from type 1 e-trailers, may be systematically overestimated. As real-world data on dynamo mode contributions were not yet available, a default model was proposed as follows:
- RES weighted: Weighted result of the two operation modes
- RES CD: Result in charge-depleting mode
- RES CS: Result in charge-sustaining mode
- UF: Utility factor [-]
Additional Results for E-Trailers with “Propulsion Support” Feature in Combination with a BEV
- ΔERBEV: Additional range of BEV due to e-trailer operation [km]
- ERe-trailer: Electric range of the e-trailer calculated based on the electrical energy consumption in CD mode and the e-trailer’s usable battery capacity [km]
- ECel, BEV + e-trailer: Electrical energy consumption of the BEV in CD mode considering the e-trailer operation [kWh/km]
- ECel, BEV + ref-trailer: Electric energy consumption of the BEV in combination with the reference trailer according to Regulation (EU) 2022/1362 [kWh/km]
4.2. Modeling Framework for E-Trailer Potential Assessment
- A generic Diesel ICE truck, which depicts the average state of vehicle technology of new vehicles in the “baseline” year (1 July 2019–30 June 2020) and is used in the official VECTO Trailer tool.
- A BEV with a virtual vehicle configuration based on 2024 vehicle and component technology as a basis for comparison.
- Passive e-trailer concepts:
- ○
- Consideration of the actual e-trailer mass and a reduction in the full-load capability of the towing vehicle for the operating mode in which the e-trailer runs in dynamo mode (CS mode state A). This includes an additional load of approximately 25 kW on the power unit (ICE or EM (electric machine)) of the truck, accounting for the 20 kW to be generated at the e-axle and the additional powertrain losses.
- Active e-trailer concepts: Due to the propulsion feature, a more detailed differentiation had to be made depending on the mode of operation:
- ○
- CS mode without propulsion support is modeled in the same way as described above.
- ○
- CS mode with propulsion support (state C) and CD mode:
- ○
- For combinations with conventional towing vehicles, a P4 hybrid configuration (featuring electric motors at the wheel hubs) was defined with the e-axle power rating adjusted to approximate the intended propulsion contribution of the e-trailer. The P4 e-axle rating was iteratively adjusted by incorporating e-trailer operation in subsequent steps until the trailer’s modeled e-axle average power matched the reference simulation’s e-axle usage. This approach was necessary because e-axle(s) on the towing vehicle have fewer control restrictions than e-axle(s) on trailers, resulting in different e-axle utilization at identical power ratings. For combination with BEVs, a similar method was applied by scaling the towing vehicle’s electric motor full-load capacity to reflect the propulsion support from the e-trailer.
- Positive total traction force for the vehicle combination:
- ○
- The e-trailer may operate in “propulsion support” mode (CD or CS mode state C), “dynamo mode” (CS mode state A), or be passively towed (CS mode state B).
- Negative total traction force for the vehicle combination with braking of the towing vehicle:
- ○
- The e-trailer may apply the feature “dynamo mode” (CS mode state A), “free recuperation” (all modes), and/or “brake blending” (all modes). If the trailer’s total braking demand exceeds the braking power applied by the dynamo mode, additional regenerative braking can occur. Consequently, the three braking functions are applied sequentially until the total braking demand is covered electrically (considering the full-load limits of the electric machine(s)).
- Negative total traction force for the vehicle combination without braking of the towing vehicle:
- ○
- This could be the case, for example, when the vehicle decelerates solely due to the driving resistances. In this case, the e-trailer may be operated in “dynamo mode” (CS mode state A) or remain inactive (every other case where dynamo mode is not active).
- Total traction force for the vehicle combination is zero:
- ○
- In this case, the e-trailer may operate in “dynamo mode” (CS mode state A).
Analyzed E-Trailer Concepts
- Each trailer starts the daily mission fully charged to 100% of its usable SOC, with no interim charging available during the mission.
- Assumption of a generic usable battery SOC of 80% with regard to the installed nominal capacity as well as a generic battery deterioration for half of its lifetime of 10%.
- Assumption of fixed average endurance brake shares per mission profile (53% for LH, 47% for RD, 40% for UD) that are based on real-world test data provided by Knorr Bremse and analysis performed by ITnA (around 18.000 km in 45 trips with various vehicles and drivers).
- Scenarios regarding regenerative braking features:
- ○
- Minimum scenario: neither brake blending nor free recuperation is available (worst case scenario regarding available CO2 free electrical energy).
- ○
- Average scenario: only free recuperation is available, assuming that 50% of the endurance brake power is shifted to the e-axle of the trailer.
- ○
- Maximum scenario: both brake blending as well as free recuperation are available and for the latter, assuming that 75% of the endurance brake power is shifted to the e-axle of the trailer.
- Type 4 e-trailers were modeled differently with regard to electric braking, in line with the feature that for this concept the towing vehicle control system can optimize the energy consumption of the entire vehicle combination, including the trailer, during operation.
- Generic usage pattern in case of an electric TRU defined by the amount of kWh reserved for cooling safety to trigger the activation of the dynamo mode:
- ○
- Pessimistic scenario: 25 kWh reserved (no plug-in effect)
- ○
- Average scenario: 10 kWh reserved (2 h of average cooling)
- ○
- Optimistic scenario: 5 kWh reserved (1 h of average cooling)
4.3. Reduction Potential of E-Trailer Concepts with Diesel ICE Towing Vehicle
- The maximum potential of the technology is approx. 10% for the case with a battery that is large enough to cover the entire electrical energy demand of the TRU by the plug-in effect.
- The minimum potential of the technology is approx. 5% in the configuration that the entire electrical energy requirement of the TRU has to be covered by the dynamo mode.
- ○
- Those results are in line with manufacturer estimates.
- In the sensitivity analysis, the assumptions on the generic usage pattern (available plug-in energy) proved to be more important than characteristics and assumptions on regenerative braking, as the full load capacity of the e-axle (20 kW) limits the additional gain from optimized regeneration.
- With this battery size, the reduction potential of a type 2 trailer with TRU is no higher than that of a type 1 trailer (calculated with 6.5% for type 2 vs. 6.9% for type 1). This is because the limit for the potential is the overall available CO2-free energy (from plug-in and electric regenerative braking), which is the same in both cases. The fact that somewhat less potential was determined for type 2 is due to the limitations of the assumed operating strategy.
- The type 2 configuration without TRU and with the assumed small battery size has only approx. 2.5% CO2 reduction potential. The effect results from the slight reduction in the propulsion demand on the towing vehicle due to the small plug-in effect and the small recuperation capabilities of the e-axle.
- The approx. 4% points more potential of the configuration with TRU is due to the CO2 savings achieved by the dynamo mode of the e-axle compared with the CO2 emitted by the Diesel unit of the reference trailer. These additional savings therefore occur in addition to the available CO2-free electrical energy.
- Considering the announced “high-end” configurations with some 500 kW e-axle rating and 500 kWh installed battery capacity, a maximum CO2 reduction of around 35% can be expected.
- The sensitivity analysis showed that the installed battery capacity has the greatest impact on the overall reduction potential. High e-axle ratings are beneficial only when paired with a battery capable of supplying sufficient energy over extended portions of the cycle.
- Features and assumptions related to regenerative braking affect the reduction potential by approximately 2% points.
- The trends are generally similar to configurations without TRU, but with a higher overall CO2 reduction potential. This is because, with the same battery and EM specifications, more CO2 is replaced per kWh through electric TRU supply compared with propulsion support.
- The maximum potential is reached with a battery capable of fully supporting both propulsion and TRU supply across all relevant cycles, requiring approximately 580 kWh of installed capacity. This corresponds to a CO2 reduction of around 43%.
- The maximum potential is identical to that of type 3 but can be achieved with a smaller battery.
- With a fully sized e-axle and a medium-sized battery, an additional reduction potential of approximately 4% points can be expected.
- There is hardly any additional potential type 4 vs. type 3 with small e-axle ratings, since in this case the small e-axle can utilize nearly its full rating even without an integrated control.
- In urban missions (which are not included in the weighted reduction potentials shown in Table 9), the differences in potential between type 4 and type 3 trailers become more pronounced. The maximum CO2 reduction potential reaches approximately 50% for type 3 trailers with a TRU and around 60% for type 4 trailers with a TRU.
4.4. Reduction Potential of E-Trailer Concepts with BEV Towing Vehicle
5. Summary and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Commission Regulation (EU) 2017/2400 of 12 December 2017 implementing Regulation (EC) No 595/2009 of the European Parliament and of the Council as regards the determination of the CO2 emissions and fuel consumption of heavy-duty vehicles and amending Directive 2007/46/EC of the European Parliament and of the Council and Commission Regulation (EU) No 582/2011. Off. J. Eur. Union 2017, 349, 1–247.
- Commission Regulation (EU) 2019/1242 of the European Parliament and of the Council of 20 June 2019 setting CO2 emission performance standards for new heavy-duty vehicles and amending Regulations (EC) No 595/2009 and (EU) 2018/956 of the European Parliament and of the Council and Council Directive 96/53/EC. PE/60/2019/REV/1. Off. J. Eur. Union 2019, 198, 202–240.
- Commission implementing Regulation (EU) 2022/1362 of 1 August 2022 implementing Regulation (EC) No 595/2009 of the European Parliament and of the Council as regards the performance of heavy-duty trailers with regard to their influence on the CO2 emissions, fuel consumption, energy consumption and zero emission driving range of motor vehicles and amending Implementing Regulation (EU) 2020/683. Off. J. Eur. Union 2022, 205, 145–206.
- Bank, D.; Ehlers, S.F.G.; Kortmann, K.-P.; Zeller, T.; Cujic, P.; Seel, T. Predictive energy management for recuperation axles in refrigerated trailers. In VDI Mechatronics Conference 2024 Proceedings. VDI Mechatroniktagung, RWTH Aachen. 2024, pp. 136–140. Available online: https://www.vdi-mechatroniktagung.rwth-aachen.de/cms/vdi-mechatroniktagung/Teilnehmende/~zfbxp/Tagungsband-und-vorherige-Tagungen/ (accessed on 26 May 2025).
- Surcel, M.-D.; Mercier, S.; Bonsi, A.K. Energy Efficiency Evaluation of a Hybrid Electric Tractor-Semi-Trailer Prototype; SAE Technical Paper 2024-01-4319; SAE International: Warrendale, PA, USA, 2024. [Google Scholar] [CrossRef]
- Zhang, J.; Han, Z.; Liu, K.; Zhao, Y. Optimization for fuel consumption and TCO of a heavy-duty truck with electricity-propelled trailer. Energy 2024, 312, 133555. [Google Scholar] [CrossRef]
- Chen, R.; Duan, Y. Research on Energy Recovery Strategy in Braking of Electric Tractor-Semitrailer; SAE Technical Paper 2025-01-8290; SAE International: Warrendale, PA, USA, 2025. [Google Scholar] [CrossRef]
- Boonstra, S.; Rieck, F. Analysis of a fictive active e-trailer. World Electr. Veh. J. 2018, 9, 6. [Google Scholar] [CrossRef]
- Fontaras, G.; Grigoratos, T.; Savvidis, D.; Anagnostopoulos, K.; Luz, R.; Rexeis, M.; Hausberger, S. An experimental evaluation of the methodology proposed for the monitoring and certification of CO2 emissions from heavy-duty vehicles in Europe. Energy 2016, 102, 354–364. [Google Scholar] [CrossRef]
- Grigoratos, T.; Fontaras, G.; Tansini, A.; Giechaskiel, B.; Savvidis, D.; Ciuffo, B. EUR 29372 EN—Assessment of the Measurement Methodology for CO2 Emissions from Heavy Duty Buses and Coaches; Publications Office of the European Union: Luxembourg, 2018; ISBN 978-92-79-94184-9. [Google Scholar] [CrossRef]
- Regulation (EU) 2020/740 of the European Parliament and of the Council of 25 May 2020 on the labelling of tyres with respect to fuel efficiency and other parameters, amending Regulation (EU) 2017/1369 and repealing Regulation (EC) No 1222/2009. Off. J. Eur. Union 2020, 177, 1–31.
- Rexeis, M. Development and Validation of a Methodology for Monitoring and Certification of Greenhouse Gas Emissions from Heavy Duty Vehicles Through Vehicle Simulation; Final Report; TU, IVT: Graz, Austria, 2014; Rep. No. I 07/14/Rex EM-I 2012/08 699. [Google Scholar]
- Rexeis, M.; Silberholz, G.; Present, S.; Blatsis, E.; Kousias, N.; Mellios, G.; Pofahl, S.; Pertl, P.; Artigau, J.; Padmaji, V.; et al. Further Development and Update of VECTO with New Technologies. Available online: https://climate.ec.europa.eu/document/download/e18121d1-4c73-4292-a5d1-d3e1584ba195_en?filename=policy_transport_vecto_fd2_en.pdf (accessed on 26 May 2025).
- Plessis, M.J.; van Eden, J.; Goedehals-Gerber, L.; Else, J. Calculating Fuel Usage and Emissions for Refrigerated Road Transport Using Real-World Data. Transp. Res. Part D 2023, 117, 103623. [Google Scholar] [CrossRef]
- Tassou, S.A.; De-Lille, Y.T. Ge.: Food transport refrigeration—Approaches to reduce energy consumption and environmental impacts of road transport. Appl. Therm. Eng. 2009, 29, 1467–1477. [Google Scholar] [CrossRef]
- Otten, M.; Hoen, M.; den Boer, E. Electric Trailer Cooling During Rest Periods; Analysis of Emissions and Costs Publication Code; CE Delft: Delft, The Netherlands, 2015. [Google Scholar]
- Wagner vom Berg, B.; Arens, U.; Kühne, U.; Stenau, J.-P.; Hasanspahic, S.; Leibenath, M. Abschlussbericht zur Studie Klimafreundliche Kühlsysteme für den Straßengüterverkehr—Marktüberblick und Dekarbonisierungspotenziale; Smart Mobility Institute Hochschule Bremerhaven Mai: Bremerhaven, Germany, 2023. [Google Scholar]
- United Nations Economic Commission for Europe. UN Regulation No. 13: Uniform Provisions Concerning the Approval of Vehicles of Categories M, N and O with Regard to Braking; United Nations Economic Commission for Europe: Geneva, Switzerland, 2015. [Google Scholar]
- ISO 11992-2:2014; Road vehicles—Interchange of Digital Information on Electrical Connections Between Towing and Towed Vehicles—Part 2: Application Layer for Brakes and Running Gear. Third edition 1 May 2014; International Organization for Standardization: Geneva, Switzerland, 2014.
- Present, S.; Rexeis, M.; Röck, M.J.; Soler, M.; Urgell, X.; Vallbona, A.G. Task 2. Development of a Detailed Methodology and Procedure for the Determination of the Effect of Trailers and Semi-Trailers Bodyworks with Regards to the CO2 Emissions/Fuel Consumption of the Towing Vehicle Final Report for Contract Number 340201/2019/818045/SER/CLIMA.C.4 (Support Preparation of Legislation on Trailers Certification); Institute of Thermodynamics and Sustainable Propulsion Systems: Graz, Austria, 2022. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| CS State ID | State of the e-Trailer Feature (If Present on the Trailer) | Remarks | |||
|---|---|---|---|---|---|
| Electric Refrigeration Unit | Regenerative Braking | Propulsion Support Function | Dynamo Mode | ||
| A | ON | ON | OFF | ON | |
| B | ON | ON | OFF | OFF | This state is identical to CD mode for a passive e-trailer. |
| C | ON | ON | ON | OFF | This state is identical to CD mode for an active e-trailer. |
| Case Determined Based on State B | Interpretation | Applied Weighting for Consolidated CS Mode Results |
|---|---|---|
| Energy balance in battery < 0 | Not enough regenerative electrical energy available to cover the demand of the refrigeration system. Thus, additionally phases in dynamo mode are required. | Weighting of B and A so that the combined energy balance is zero. |
| Energy balance in battery > 0 | Regenerative electrical energy available to be used for vehicle propulsion support. | Weighting of B and C so that the combined energy balance is zero. For trailers without propulsion support, B is the final result. * |
| Energy balance in battery = zero | Regenerative electrical energy available exactly covers the demand of the refrigeration system. | B is the final result (also emerges as a boundary case of the two cases mentioned above). |
| ICE Diesel | BEV | ||
|---|---|---|---|
| ICE rated power | kW | 350 | - |
| EM power (peak/continuous) | kW | - | 360/540 |
| Powertrain configuration | - | conventional AMT 12 gears | E2 AT 3 gears |
| Battery nominal energy content | kWh | - | 550 |
| Vehicle curb mass (tractor only) | kg | 7747 | 9906 |
| RRC (steer/drive) | - | C/C | A/B |
| CdxA | m2 | 5.63 | 4.77 |
| Retarder | - | Yes | No |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Plug-In | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern |
|---|---|---|---|---|---|---|
| Type 1 | Pure electric | 20 | No | 6 | minimum | not relevant |
| Type 1 | Pure electric | 20 | No | 6 | average | not relevant |
| Type 1 | Pure electric | 20 | No | 6 | maximum | not relevant |
| Type 1 | Pure electric | 20 | Yes | 25 | average | pessimistic |
| Type 1 | Pure electric | 20 | Yes | 25 | average | average |
| Type 1 | Pure electric | 20 | Yes | 25 | average | optimistic |
| Type 1 | Pure electric | 20 | Yes | 55 | average | average |
| Type 2 | Pure electric | 20 | Yes | 25 | average | average |
| Type 2 | None | 20 | Yes | 25 | average | average |
| Type 3 | None | 100 peak | Yes | 60 | average | average |
| Type 3 | None | 100 peak | Yes | 200 | average | average |
| Type 3 | None | 500 peak | Yes | 250 | average | average |
| Type 3 | None | 500 peak | Yes | 500 | minimum | average |
| Type 3 | None | 500 peak | Yes | 500 | average | average |
| Type 3 | None | 500 peak | Yes | 500 | maximum | average |
| Type 3 | Pure electric | 100 peak | Yes | 60 | average | average |
| Type 3 | Pure electric | 100 peak | Yes | 200 | average | average |
| Type 3 | Pure electric | 500 peak | Yes | 250 | average | average |
| Type 3 | Pure electric | 500 peak | Yes | 500 | average | average |
| Type 3 | Pure electric | 500 peak | Yes | 580 | average | average |
| Type 4 | Pure electric | 100 peak | Yes | 60 | fully optim. | average |
| Type 4 | Pure electric | 100 peak | Yes | 200 | fully optim. | average |
| Type 4 | Pure electric | 500 peak | Yes | 250 | fully optim. | average |
| Type 4 | Pure electric | 500 peak | Yes | 500 | fully optim. | average |
| Type 4 | Pure electric | 500 peak | Yes | 560 | fully optim. | average |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Plug-In | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern |
|---|---|---|---|---|---|---|
| Type 1 | Pure electr. | 20 | No | 6 | none | not relevant |
| Type 1 | Pure electr. | 20 | Yes | 55 | none | average |
| Type 3 | Pure electr. | 100 peak | Yes | 130 | none | average |
| Type 3 | Pure electr. | 500 peak | Yes | 350 | none | average |
| Type 3 | None | 100 peak | Yes | 130 | none | average |
| Type 3 | None | 500 peak | Yes | 350 | none | average |
| Type 4 | Pure electr. | 100 peak | Yes | 130 | fully optim. | average |
| Type 4 | Pure electr. | 500 peak | Yes | 350 | fully optim. | average |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern | CO2/Energy Reduction Potential |
|---|---|---|---|---|---|---|
| Type 1 | Pure electr. | 20 | 6 | minimum | not relevant | 4.9% |
| Type 1 | Pure electr. | 20 | 6 | average | not relevant | 5.7% |
| Type 1 | Pure electr. | 20 | 6 | maximum | not relevant | 5.9% |
| Type 1 | Pure electr. | 20 | 25 | average | pessimistic | 5.4% |
| Type 1 | Pure electr. | 20 | 25 | average | average | 6.9% |
| Type 1 | Pure electr. | 20 | 25 | average | optimistic | 7.9% |
| Type 1 | Pure electr. | 20 | 55 | average | average | 10.1% |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern | CO2/Energy Reduction Potential |
|---|---|---|---|---|---|---|
| Type 2 | Pure electr. | 20 | 25 | average | average | 6.5% |
| Type 2 | None. | 20 | 25 | average | average | 2.6% |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern | CO2/Energy Reduction Potential |
|---|---|---|---|---|---|---|
| Type 3 | None | 100 peak | 60 | average | average | 6.4% |
| Type 3 | None | 100 peak | 200 | average | average | 18.4% |
| Type 3 | None | 500 peak | 250 | average | average | 20.6% |
| Type 3 | None | 500 peak | 500 | minimum | average | 33.3% |
| Type 3 | None | 500 peak | 500 | average | average | 34.4% |
| Type 3 | None | 500 peak | 500 | maximum | average | 34.9% |
| Type 3 | Pure electric | 100 peak | 60 | average | average | 10.5% |
| Type 3 | Pure electric | 100 peak | 200 | average | average | 22.0% |
| Type 3 | Pure electric | 500 peak | 250 | average | average | 21.6% |
| Type 3 | Pure electric | 500 peak | 500 | average | average | 38.3% |
| Type 3 | Pure electric | 500 peak | 580 | average | average | 43.4% |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern | CO2/Energy Reduction Potential |
|---|---|---|---|---|---|---|
| Type 4 | Pure electric | 100 peak | 60 | fully optim. | average | 11.6% |
| Type 4 | Pure electric | 100 peak | 200 | fully optim. | average | 22.9% |
| Type 4 | Pure electric | 500 peak | 250 | fully optim. | average | 25.6% |
| Type 4 | Pure electric | 500 peak | 500 | fully optim. | average | 40.1% |
| Type 4 | Pure electric | 500 peak | 560 | fully optim. | average | 43.4% |
| E-Trailer Type | Refrigeration Supply Type | Max Rating of e-Axle(s) [kW] | Nominal Battery Capacity [kWh] | Regenerative Braking Functions | Generic Usage Pattern | BEV Range Extension [km] | Eff. Ratio kWh/km Based |
|---|---|---|---|---|---|---|---|
| Type 1 | Pure electr. | 20 | 6 | none | not relevant | −25 | 1.005 |
| Type 1 | Pure electr. | 20 | 55 | none | average | +0 | 1.001 |
| Type 3 | Pure electr. | 100 peak | 130 | none | average | +60 | 1.014 |
| Type 3 | Pure electr. | 500 peak | 350 | none | average | +161 | 1.084 |
| Type 3 | None | 100 peak | 130 | none | average | +78 | 1.015 |
| Type 3 | None | 500 peak | 350 | none | average | +185 | 1.068 |
| Type 4 | Pure electr. | 100 peak | 130 | fully optim. | average | +60 | 1.013 |
| Type 4 | Pure electr. | 500 peak | 350 | fully optim. | average | +162 | 1.079 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Present, S.; Rexeis, M. Potential Assessment of Electrified Heavy-Duty Trailers Based on the Methods Developed for EU Legislation (VECTO Trailer). Future Transp. 2025, 5, 77. https://doi.org/10.3390/futuretransp5030077
Present S, Rexeis M. Potential Assessment of Electrified Heavy-Duty Trailers Based on the Methods Developed for EU Legislation (VECTO Trailer). Future Transportation. 2025; 5(3):77. https://doi.org/10.3390/futuretransp5030077
Chicago/Turabian StylePresent, Stefan, and Martin Rexeis. 2025. "Potential Assessment of Electrified Heavy-Duty Trailers Based on the Methods Developed for EU Legislation (VECTO Trailer)" Future Transportation 5, no. 3: 77. https://doi.org/10.3390/futuretransp5030077
APA StylePresent, S., & Rexeis, M. (2025). Potential Assessment of Electrified Heavy-Duty Trailers Based on the Methods Developed for EU Legislation (VECTO Trailer). Future Transportation, 5(3), 77. https://doi.org/10.3390/futuretransp5030077