
Towards a Smart and Transparent Road-Based Vehicle Speed Detection System in Tanzanian Highways: A Review of Methods, Technologies, and Systems


Abstract
1. Introduction
- Developed a taxonomy and a summarized guideline for selecting vehicle speed detection methods.
- Proposed new technological integration of smart and transparent vehicle speed detection system implementation.
- Identified research gaps for addressing existing systems’ limitations and meeting efficiency and transparency requirements.
- Conceptualized and demonstrated how emerging technologies (IoT, AI cloud computing, and blockchain) can be leveraged to implement smart and transparent vehicle speed detection systems.
2. Review of Methods for Vehicle Speed Detection
2.1. Road-Based
2.1.1. Intrusive Methods
2.1.2. Non-Intrusive Methods
2.2. Vehicle-Based
3. Review of Technologies for Implementing Smart and Transparent Vehicle Speed Detection Systems
4. Review of Existing Road-Based Vehicle Speed Detection Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Speed Type | Detection Method | Technologies | Storage and Processing | Comments |
|---|---|---|---|---|---|
| [90,91] | Instant | Acceleration/piezoresistance sensors | Wireless Sensor Network (WSN)/embedded system | Centralized/Remote | These systems may disrupt traffic flow during installation, operation, and maintenance and may be damaged if deployed on poor road surfaces. |
| [11] | Average | Vision | IoT and AI | Centralized | Proves the concept of smartly detecting vehicle speed on the highways of Tanzania. However, not feasible due to cost. |
| [18] | Instant. | Vision | AI in a client–server architecture. | Centralized | Proves the concept of detecting speed on urban roads of Tanzania. However, the implementation of client nodes is not disclosed. |
| [24] | Average | LiDAR | AI | N/A | Demonstrated the usefulness and limitations of LiDAR sensors for vehicle speed measurement. |
| [92,93] | Instant | RFID | IoT and AI | Centralized | RFID technology faces several obstacles in vehicle speed detection such as privacy issues and dependence on vehicle involvement. |
| [25] | Average | Infrared, RFID, and GPS. | IoT | Centralized | Suitable for urban environments. However, combining road- and vehicle-based methods is susceptible to forgery. |
| [22] | Average | Vision | IoT and AI | Centralized | Suitable for urban environments but looks complicated and computationally expensive. |
| [94,95] | Instantaneous | Magnetic sensor | IoT, IoT, Lightweight | Remote/Cloud | Illustrates how emerging technologies can provide practical, affordable, and simple-to-install alternatives to conventional speed sensors. |
| [96,97,98] | Average/ Instantaneous | Radar/potentiometer/laser | IoT/Automation | Centralized/ Remote | Primarily designed for law enforcement to detect overspeed, not collecting general-purpose data. |
| [99,100,101,102,103,104,105,106,107] | Average/ Instantaneous | GPS, radar sensors, and accelerometers | IoT/AI/embedded systems | Centralized/ Remote | Vehicle-based systems depend on the trust and cooperation of drivers and are limited to particular vehicles such as trucks and buses. |
| [23,108,109,110,111] | Average | Vision | Classical CV | Demonstrate promising precision and accuracy. Require enhancements to support license plate identification. | |
| [112,113] | Instantaneous | Vision | AI, HCI | Remote/Centralized | Demonstrate application of non-YOLO-based deep learning algorithms and libraries for vehicle detection, tracking, and speed estimations. |
| [114,115,116,117,118,119,120] | Instantaneous/Average | Vision | AI | N/A | Demonstrated applications of deep learning models, YOLOv3 and YOLOv4, for speed determination. |
| [121,122,123,124] | Averaged-Instantaneous | Vision | AI | N/A | Demonstrated improved accuracy in vehicle detection and speed estimation by leveraging the YOLOv5 model. |
| [125] | Average | Vision | AI | N/A | Acknowledged vision-based speed detection is a complex task as its accuracy depends on detection, tracking, and speed estimation schemes. |
| [126,127,128,129,130,132,133,151] | Average | Vision | AI | N/A | Highlights the role of advanced deep learning techniques in improving vehicle speed detection. |
| [134,135,136,137] | Instantaneous | Vision | AI, UAV | Centralized (Edge Computing) | UAVs face various challenges, yet they are effective tools for delivering real-time visual information for enhancing vehicle speed detection. |
| This work | Instantaneous | Radar and Vision | IoT and AI alongside cloud computing, and blockchain | Centralized processing and decentralized storage. | Proposes integration of IoT, AI, cloud computing, and blockchain technologies for implementing smart and transparent road-based vehicle speed detection systems. |
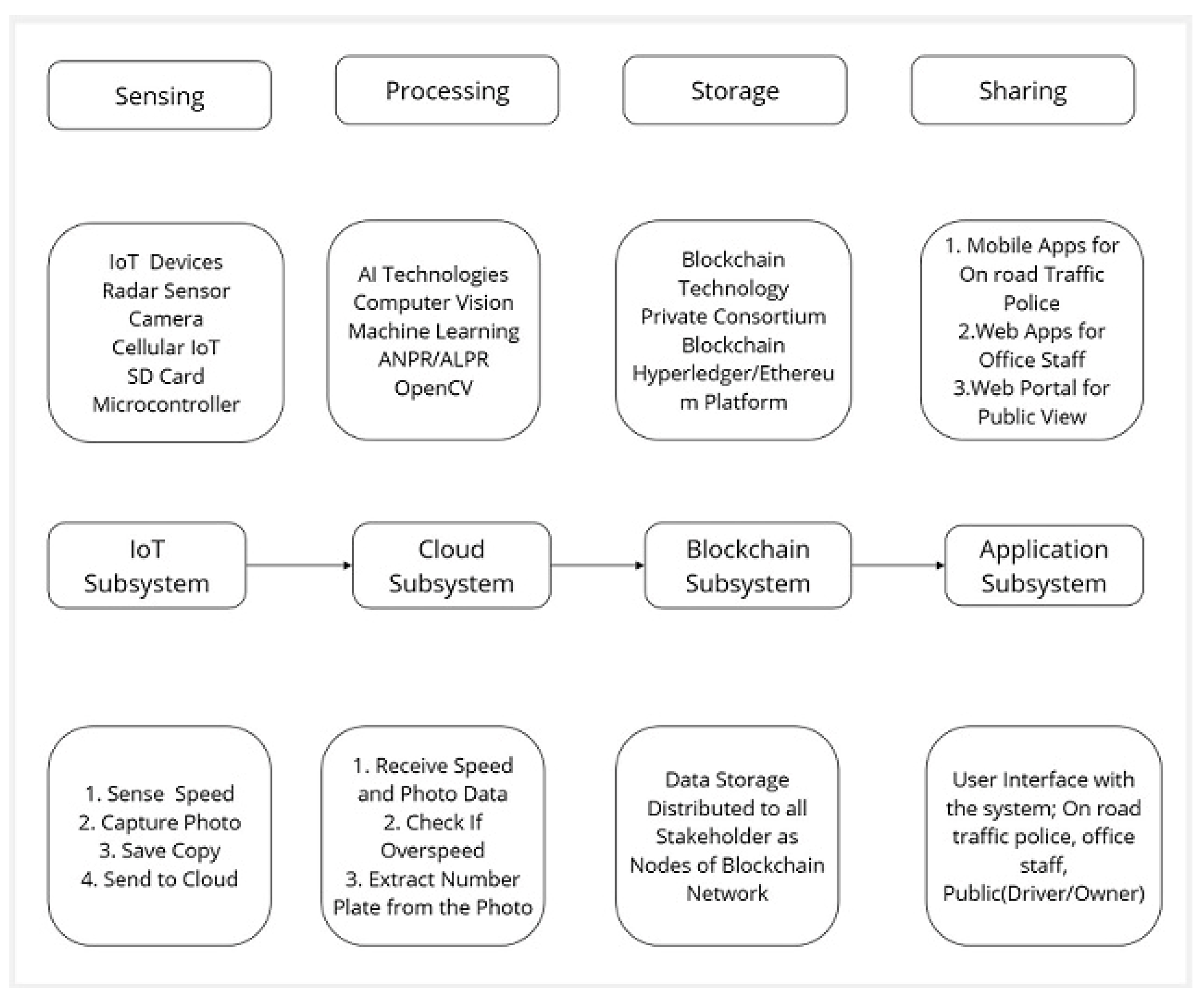
5. Proposed Smart and Transparent Road-Based Vehicle Speed Detection System
5.1. The Conceptual Framework
- Fd = measured Doppler shift frequency in Hz;
- Vc = velocity of the target in m/s;
- C = Speed of Light (3 × 108 m/s);
- Fo = operating frequency of the sensor (e.g., 10.525 GHz for HB100).
| Algorithm 1: Algorithm for the IoT subsystem |
| Input: Radar Doppler shift frequency (Fd), timestamp, captured image |
| Output: JSON object transmitted to the cloud server |
| 1. Initialize the radar sensor and camera module. |
| 2. Continuously monitor radar sensor for Doppler shift frequency (Fd). |
| 3. If a vehicle is detected: |
| a. Record timestamp |
| b. Compute speed (Vc) using the Doppler effect formula |
| c. Capture vehicle image. |
| d. Compress and encode the image in Base64 format. |
| e. Construct a JSON object: |
| { |
| “timestamp”: <time>, |
| “speed”: <V>, |
| “image”: <Base64_image> |
| } |
| f. Store JSON record temporarily on the SD card. |
| g. Establish an HTTP connection and transmit the JSON object as a payload to the cloud server. |
| 4. End. |
| Algorithm 2: Algorithm for cloud subsystem |
| Input: JSON object {timestamp, speed, image} |
| Output: vehicle number plate, imageHash, new JSON object sent to Blockchain. |
| 1. Start the API server to listen for HTTP POST requests. |
| 2. Receive incoming JSON objects from the IoT subsystem. |
| 3. Extract data fields: timestamp, speed, and Base64 image. |
| 4. Convert base64 image to hash (SHA-256) |
| 5. Decode the Base64 image and decompress it. |
| 6. Store image and imageHash in the cloud database. |
| 7. Perform ANPR on the stored image: |
| a. Convert the image to grayscale. |
| b. Apply edge detection and contour analysis. |
| c. Extract number plate region and process characters using OCR. |
| d. Store the extracted vehicle number in the database. |
| 8. Construct a JSON object: |
| { |
| “timestamp”: <time>, |
| “vehicle_number”: <plate_number>, |
| “speed”: <speed> |
| “image”: <imageHash> |
| } |
| 9. Send this data to the Hyperledger Fabric blockchain via the HTTPS. |
| 10. If a transaction is successful, return a confirmation response. |
| 11. If a failure occurs, retry or log the error. |
| 12. End. |
| Algorithm 3: Algorithm for blockchain subsystem |
| 1. Wait for incoming vehicle speed data from the cloud server |
| 2. On receiving a new speed record: |
| a. Extract timestamp, vehicle number, speed, and image hash |
| b. Construct a transaction payload |
| c. Submit a transaction to the blockchain: |
| i. Invoke the smart contract function (recordVehicleSpeed) |
| ii. Pass arguments: timestamp, vehicle number, speed, image hash |
| d. Get transaction ID and confirmation from the blockchain |
| e. Log transaction ID for verification |
| 3. Return transaction ID to the cloud system |
| 4. Repeat for new incoming speed data |
| Algorithm 4: Algorithm for the police application subsystem |
|
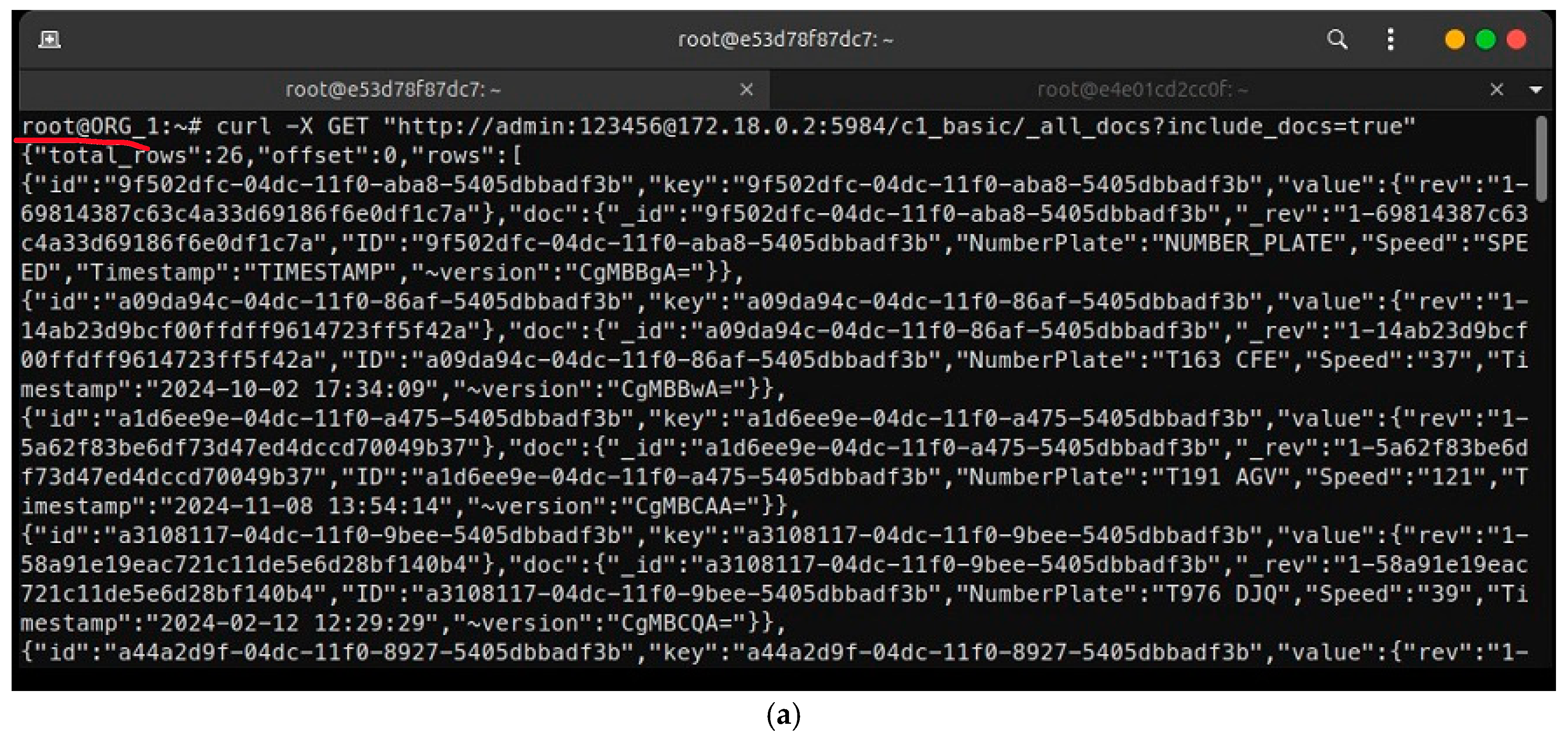
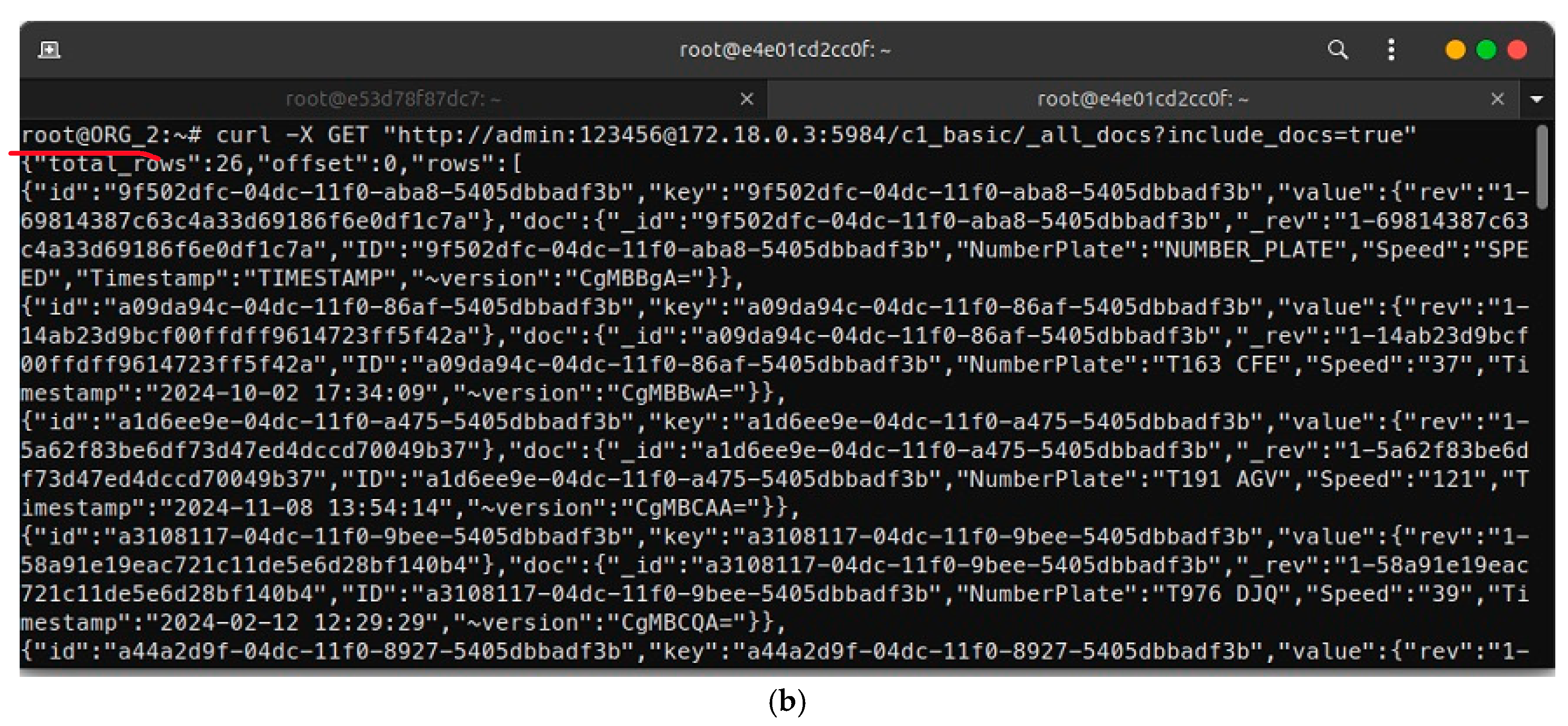
5.2. The Proposed System Proof-of-Concept Demonstration
5.3. Performance Evaluation of the Proof-of-Concept Demonstration
5.3.1. Experiment 1: How Payload Size Affects Latency
- NR = 5: represents the typical transmission scenario, where up to five vehicles’ data are sent at a time.
- NR = 10: simulates data transmission after a brief network outage, where accumulated records are sent in bulk.
- NR = 100: represents the worst-case scenario, where data are transmitted after a prolonged outage.
- Step 1: Computation of latency for each node i and record j using Equation (5).where
- Tclient-sent,i,j = timestamp when node i sends record j
- Tblockchain-receive,i,j = Timestamp when blockchain received record j from node i
- Step 2: Computation of average latency per node for a given NR using Equation (5).
- Step 3: Computation of overall average latency for the 12 NN with the help of Equation (5).
- Step 4: Finally, the conversion of latency computed in Equation (7) into milliseconds:
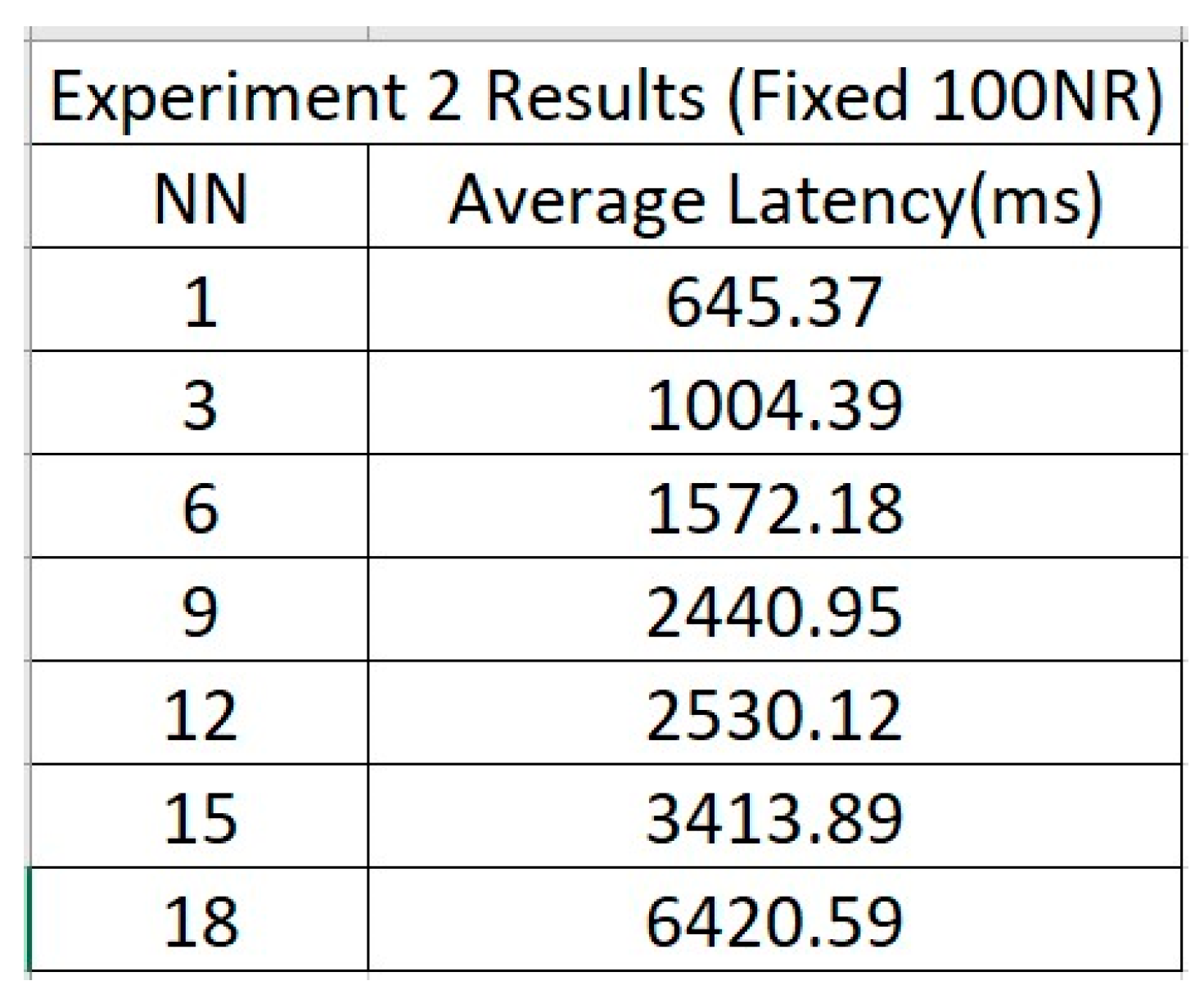
5.3.2. Experiment 2: How the Number of Nodes Affects Latency
- Tblockcchain-received,j = timestamp when record j is sent by the client;
- Tclient-sent,j = timestamp when record j is received by the blockchain.
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- WHO. Global Status Report on Road Safety 2023; WHO: Geneva, Switzerland, 2023. [Google Scholar]
- Worldlifeexpectancy. Tanzania: Road Traffic Accidents. Available online: https://www.worldlifeexpectancy.com/tanzania-road-traffic-accidents (accessed on 22 October 2024).
- Vitalis, N.; Runyoro, A.-A.K.; Selemani, M. Assessing Factors for Occurrence of Road Accidents in Tanzania Using Panel Data Analysis: Road Safety Perspective. J. Transp. Technol. 2022, 12, 123–136. [Google Scholar] [CrossRef]
- Luke, R. Current and Future Trends in Driver Behaviour and Traffic Safety Scholarship: An African Research Agenda. Int. J. Environ. Res. Public Health 2023, 20, 4290. [Google Scholar] [CrossRef] [PubMed]
- Sabey, B.E.; Taylor, H. The Known Risks We Run: The Highway. In Societal Risk Assessment; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar] [CrossRef]
- Salmon, P.M.; Regan, M.A.; Johnston, I. Human Error and Road Transport: Phase One: Literature Review; Monash University Accident Research Centre: Clayton, Australia, 2005. [Google Scholar]
- Antoine, G.; Mikeka, C.; Bajpai, G.; Jayavel, K. Speed management strategy: Designing an IoT-based electric vehicle speed control monitoring system. Sensors 2021, 21, 6670. [Google Scholar] [CrossRef] [PubMed]
- Hassen, A.; Godesso, A.; Abebe, L.; Girma, E. Risky driving behaviors for road traffic accident among drivers in Mekele city, Northern Ethiopia. BMC Res. Notes 2011, 4, 535. [Google Scholar] [CrossRef]
- Rolison, J.J.; Regev, S.; Moutari, S.; Feeney, A. What are the factors that contribute to road accidents? An assessment of law enforcement views, ordinary drivers’ opinions, and road accident records. Accid. Anal. Prev. 2018, 115, 11–24. [Google Scholar] [CrossRef]
- Eliakunda, W.; Mashoke, M.; Gurisha, Z. Vehicles Accident In Tanzania: Causes And Control Challenges. Int. J. Bus. Manag. Econ. Res. (IJBMER) 2018, 9, 1491–1500. [Google Scholar]
- Runyoro, A.-A.K.; Ndume, V.A.; Mganilwa, Z.; Kambira, I. A Smart Approach for Vehicle Speed Monitoring and Accidents Trend at Black Spot Areas in Tanzania. Open Access Libr. J. 2022, 9, e8465. [Google Scholar] [CrossRef]
- Fondzenyuy, S.K.; Turner, B.M.; Burlacu, A.F.; Jurewicz, C. The contribution of excessive or inappropriate speeds to road traffic crashes and fatalities: A review of literature. Transp. Eng. 2024, 17, 100259. [Google Scholar] [CrossRef]
- Gerald, A.; Mbue, I.N.; Merlin, A.Z.; Achiri, A.T. A Systematic Review of Excessive Speed Monitoring and Control System for Accident Prevention on Cameroon Highways. World J. Eng. Technol. 2022, 10, 28–39. [Google Scholar] [CrossRef]
- Bellini, D.; Iaconis, M.C.; Traettino, E. Speed limits and road warning signs as an aid for driving behavior. Transp. Res. Procedia 2020, 45, 135–142. [Google Scholar] [CrossRef]
- Jacques, M.A.P.; Velloso, M.S.; Torres, C.V. Study of drivers’ salient beliefs and intention to comply with speed limits on urban roads. Transp. Res. Part F Traffic Psychol. Behav. 2018, 55, 435–450. [Google Scholar] [CrossRef]
- Montella, A.; Punzo, V.; Chiaradonna, S.; Mauriello, F.; Montanino, M. Point-to-point speed enforcement systems: Speed limits design criteria and analysis of drivers’ compliance. Transp. Res. Part C Emerg. Technol. 2015, 53, 1–18. [Google Scholar] [CrossRef]
- Bauernschuster, S.; Rekers, R. Speed limit enforcement and road safety. J. Public Econ. 2022, 210, 104663. [Google Scholar] [CrossRef]
- Kisingo, E.; Hamisi, N.; Iddi, H.U.; Maiseli, B.J. Multi-Vehicle Speed Estimation Algorithm Based on Real-Time Inter-Frame Tracking Technique. Tanzan. J. Sci. 2021, 47, 1125–1137. [Google Scholar] [CrossRef]
- Appiah, O.; Quayson, E.; Opoku, E. Ultrasonic sensor-based traffic information acquisition system; a cheaper alternative for ITS application in developing countries. Sci. Afr. 2020, 9, e00487. [Google Scholar] [CrossRef]
- Llorca, D.F.; Martínez, A.H.; Daza, I.G. Vision-based vehicle speed estimation: A survey. IET Intell. Transp. Syst. 2021, 15, 987–1005. [Google Scholar] [CrossRef]
- Runyoro, A.-A.K.; Ko, J. Real-Time Road Traffic Management Using Floating Car Data. Int. J. Fuzzy Log. Intell. Syst. 2013, 13, 269–276. [Google Scholar] [CrossRef]
- Khan, S.U.; Alam, N.; Jan, S.U.; Koo, I.S. IoT-Enabled Vehicle Speed Monitoring System. Electronics 2022, 11, 614. [Google Scholar] [CrossRef]
- Khasim, K.N.V.; Anilkumar, G.; Vamshi, G.; Ch, S.K.; Yadav, M.N. Moving Object Detection and Speed Estimation by Digital Image Processing. In Journal of Physics: Conference Series; Institute of Physics: Beijing, China, 2022. [Google Scholar] [CrossRef]
- Zhang, J.; Xiao, W.; Coifman, B.; Mills, J.P. Vehicle Tracking and Speed Estimation From Roadside Lidar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5597–5608. [Google Scholar] [CrossRef]
- Ullah, A.; Sumiraj, A.; Shanawoaz, M.; Kabir, A. IoT-based Vehicle Speed Monitoring and Controlling System for Reducing Accident Occurs on the Road in Bangladesh. J. Adv. Parallel Comput. 2020, 3, 1–17. [Google Scholar]
- Li, W.; Wu, J.; Cao, J.; Chen, N.; Zhang, Q.; Buyya, R. Blockchain-based trust management in cloud computing systems: A taxonomy, review and future directions. J. Cloud Comput. 2021, 10, 35. [Google Scholar] [CrossRef]
- Huang, J.; Nicol, D.M. Trust mechanisms for cloud computing. J. Cloud Comput. 2013, 2, 9. [Google Scholar] [CrossRef]
- Del Serrone, G.; Cantisani, G.; Peluso, P. Speed data collection methods: A review. Transp. Res. Procedia 2023, 69, 512–519. [Google Scholar] [CrossRef]
- Javadi, S.; Dahl, M.; Pettersson, M.I. Vehicle speed measurement model for video-based systems. Comput. Electr. Eng. 2019, 76, 238–248. [Google Scholar] [CrossRef]
- Yang, L.; Luo, J.; Song, X.; Li, M.; Wen, P.; Xiong, Z. Robust Vehicle Speed Measurement Based on Feature Information Fusion for Vehicle Multi-Characteristic Detection. Entropy 2021, 23, 910. [Google Scholar] [CrossRef]
- Mathew, T.V. Automated Traffic Measurement: Lecture Notes in Transportation Systems Engineering. Available online: https://www.civil.iitb.ac.in/~vmtom/nptel/524_AutoMer/web/web.html (accessed on 24 April 2023).
- Wang, H.; Ouyang, M.; Meng, Q.; Kong, Q. A traffic data collection and analysis method based on wireless sensor network. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 2. [Google Scholar] [CrossRef]
- Obiri-Yeboah, A.A.; Gbeckor-Kove, M.S.; Oliver-Commey, Y. Overview and Recommendations for Road Traffic Data Collection Methods and Applications in Ghana. Int. J. Eng. Res. Appl. 2021, 11, 01–09. [Google Scholar]
- Leduc, G. Road Traffic Data: Collection Methods and Applications; Working Papers on Energy, Transport and Climate Change, No. 1; European Commission Joint Research Centre: Seville, Spain, 2008; Available online: https://www.researchgate.net/publication/254424803_Road_Traffic_Data_Collection_Methods_and_Applications (accessed on 10 April 2024).
- Trafford, R.; Tan, S.; Linden, R.; Donovan, J.; Neville, E.; Marroquin, W. Retrofitting Rural Infrastructure for Smart Parking and Traffic Monitoring. 2017. Available online: https://www.researchgate.net/publication/311380758 (accessed on 14 June 2024).
- Jayaratne, D.; Vidanapathirana, C.; Pasindu, H. Challenges faced in heterogeneous traffic data collection: A comparison of traffic data collection technologies. J. Natl. Sci. Found. Sri Lanka 2020, 48, 227–237. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Wei, Y.; Zhang, L. Effect of time interval on speed estimation using single loop detector measurements. KSCE J. Civ. Eng. 2013, 17, 1130–1138. [Google Scholar] [CrossRef]
- Won, M. Intelligent Traffic Monitoring Systems for Vehicle Classification: A Survey. IEEE Access 2020, 8, 73340–73358. [Google Scholar] [CrossRef]
- Mimbela, L.E.Y.; Klein, L.A.; Kent, P.; Hamrick, J.L.; Luces, K.M.; Herrera, S. A Summary of Vehicle Detection and Surveillance Technologies Used in Intelligent Transportation Systems Submitted to: Federal Highway Administration’s (FHWA) Intelligent Transportation Systems Program Office Prepared By. 2007. Available online: https://www.fhwa.dot.gov/policyinformation/pubs/vdstits2007/vdstits2007.pdf (accessed on 14 June 2024).
- Lan, J.; Li, J.; Hu, G.; Ran, B.; Wang, L. Vehicle speed measurement based on gray constraint optical flow algorithm. Optik 2014, 125, 289–295. [Google Scholar] [CrossRef]
- Hou, Y.; Li, Q.; Zhang, C.; Lu, G.; Ye, Z.; Chen, Y.; Wang, L.; Cao, D. The State-of-the-Art Review on Applications of Intrusive Sensing, Image Processing Techniques, and Machine Learning Methods in Pavement Monitoring and Analysis. Engineering 2021, 7, 845–856. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine; Transportation Research Board; National Cooperative Highway Research Program; Middleton, D.; Turner, P.; Charara, H.; Sunkari, S.; Geedipally, S.; Scopatz, R. Improving the Quality of Motorcycle Travel Data Collection; The National Academies Press: Washington, DC, USA, 2013; Available online: https://nap.nationalacademies.org/catalog/22444/improving-the-quality-of-motorcycle-travel-data-collection (accessed on 30 March 2025).
- Tourani, A.; Shahbahrami, A.; Akoushideh, A.; Khazaee, S.; Suen, C.Y. Motion-based Vehicle Speed Measurement for Intelligent Transportation Systems. Int. J. Image Graph. Signal Process. 2019, 11, 42–54. [Google Scholar] [CrossRef]
- Jeng, S.-L.; Chieng, W.-H.; Lu, H.-P. Estimating Speed Using a Side-Looking Single-Radar Vehicle Detector. IEEE Trans. Intell. Transp. Syst. 2014, 15, 607–614. [Google Scholar] [CrossRef]
- WisDOT. Wisconsin Statewide Speed Management Data Collection Methods. Available online: https://wisconsindot.gov/dtsdManuals/traffic-ops/manuals-and-standards/speed/methods.pdf (accessed on 12 March 2025).
- Ahsan, M.; McManis, J.; Hashmi, M.S.J. Prototype system development for wireless vehicle speed monitoring. In Proceedings of the 2014 9th International Symposium on Communication Systems, Networks and Digital Signal Processing, CSNDSP 2014, Manchester, UK, 23–25 July 2014. [Google Scholar] [CrossRef]
- Vu, V.Q.; Ngo, V.L.; Vu, T.T.; Doan, V.P. Vehicle speed estimation using two roadside passive infrared sensors. Int. J. Mod. Phys. B 2020, 34, 2040151. [Google Scholar] [CrossRef]
- Holmgren, J.; Fredriksson, H.; Dahl, M. Traffic data collection using active mobile and stationary devices. Procedia Comput. Sci. 2020, 177, 49–56. [Google Scholar] [CrossRef]
- Pu, Z.; Cui, Z.; Tang, J.; Wang, S.; Wang, Y. Multimodal Traffic Speed Monitoring: A Real-Time System Based on Passive Wi-Fi and Bluetooth Sensing Technology. IEEE Int. Things J. 2022, 9, 12413–12424. [Google Scholar] [CrossRef]
- Pun, L.; Zhao, P.; Liu, X. A Multiple Regression Approach for Traffic Flow Estimation. IEEE Access 2019, 7, 35998–36009. [Google Scholar] [CrossRef]
- Romero, M.; Guédria, W.; Panetto, H.; Barafort, B. Towards a Characterisation of Smart Systems: A Systematic Literature Review. Comput. Ind. 2020, 120, 103224. [Google Scholar] [CrossRef]
- Alter, S. Making Sense of Smartness in the Context of Smart Devices and Smart Systems. Inf. Syst. Front. 2020, 22, 381–393. [Google Scholar] [CrossRef]
- Ali, S.; Abuhmed, T.; El-Sappagh, S.; Muhammad, K.; Alonso-Moral, J.M.; Confalonieri, R.; Guidotti, R.; Del Ser, J.; Díaz-Rodríguez, N.; Herrera, F. Explainable Artificial Intelligence (XAI): What we know and what is left to attain Trustworthy Artificial Intelligence. Inf. Fusion 2023, 99, 101805. [Google Scholar] [CrossRef]
- Rodgers, W.; Murray, J.M.; Stefanidis, A.; Degbey, W.Y.; Tarba, S.Y. An artificial intelligence algorithmic approach to ethical decision-making in human resource management processes. Hum. Resour. Manag. Rev. 2023, 33, 100925. [Google Scholar] [CrossRef]
- Alahi, E.E.; Sukkuea, A.; Tina, F.W.; Nag, A.; Kurdthongmee, W.; Suwannarat, K.; Mukhopadhyay, S.C. Integration of IoT-Enabled Technologies and Artificial Intelligence (AI) for Smart City Scenario: Recent Advancements and Future Trends. Sensors 2023, 23, 5206. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Popova, Y.; Kuchin, Y.; Zaitseva, E.; Kalimoldayev, A.; Symagulov, A.; Levashenko, V.; Abdoldina, F.; Gopejenko, V.; Yakunin, K.; et al. Review of Artificial Intelligence and Machine Learning Technologies: Classification, Restrictions, Opportunities and Challenges. Mathematics 2022, 10, 2552. [Google Scholar] [CrossRef]
- Sarker, I.H. AI-Based Modeling: Techniques, Applications and Research Issues Towards Automation, Intelligent and Smart Systems. SN Comput. Sci. 2022, 3, 158. [Google Scholar] [CrossRef]
- Bezboruah, T.; Bora, A. Artificial intelligence: The Technology, Challenges and Applications. Trans. Eng. Comput. Sci. 2020, 8, 44–51. [Google Scholar]
- Singh, P.; Elmi, Z.; Lau, Y.-Y.; Borowska-Stefańska, M.; Wiśniewski, S.; Dulebenets, M.A. Blockchain and AI technology convergence: Applications in transportation systems. Veh. Commun. 2022, 38, 100521. [Google Scholar] [CrossRef]
- Astarita, V.; Giofrè, V.P.; Mirabelli, G.; Solina, V. A Review of Blockchain-Based Systems in Transportation. Information 2020, 11, 21. [Google Scholar] [CrossRef]
- Iyer, L.S. AI enabled applications towards intelligent transportation. Transp. Eng. 2021, 5, 100083. [Google Scholar] [CrossRef]
- Vanitha, C.N.; Malathy, S.; Sharmila, C.; Kalaiselvi, T.C. Potential Applications of AI in Transportation. In Artificial Intelligence for Future Intelligent Transportation: Smarter and Greener Infrastructure Design; Apple Academic Press: Cambridge, MA, USA, 2024; pp. 221–242. [Google Scholar] [CrossRef]
- Mnyakin, M. Applications of AI, IoT, and Cloud Computing in Smart Transportation: A Review. Artif. Intell. Soc. 2023, 3, 9–27. [Google Scholar]
- Akhtar, M.; Moridpour, S. A Review of Traffic Congestion Prediction Using Artificial Intelligence. J. Adv. Transp. 2021, 2021, 8878011. [Google Scholar] [CrossRef]
- Devi, G.R.; Athiyan, S.; Thamizh, I.; Varthini, V.H. Speed and Distance Detection for Highway Traffic using Python. In Proceedings of the 2023 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 17–18 November 2023; IEEE: New York, NY, USA, 2023; pp. 1–3. [Google Scholar] [CrossRef]
- Kumar, P.S.; Shanmugasundaram, S.; Mahalakshmi, S. Vehicle Number Plate Identification and Speed Detection for Traffic Surveillance Prevention Using Machine Learning. In Proceedings of the 2023 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 17–18 November 2023; IEEE: New York, NY, USA, 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Taweepworadej, W.; Kanarkard, W.; Tientanopajai, K. Enhancing University Safety through AI-Powered Speed Detection. In Proceedings of the 2024 International Technical Conference on Circuits/Systems, Computers, and Communications (ITC-CSCC), Okinawa, Japan, 2–5 July 2024; IEEE: New York, NY, USA, 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Khan, A.A.; Laghari, A.A.; Awan, S.A. Machine Learning in Computer Vision: A Review. EAI Endorsed Trans. Scalable Inf. Syst. 2021, 8, e4. [Google Scholar] [CrossRef]
- Abiodun, O.I.; Alawida, M.; Omolara, A.E.; Alabdulatif, A. Data provenance for cloud forensic investigations, security, challenges, solutions and future perspectives: A survey. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 10217–10245. [Google Scholar] [CrossRef]
- Mouha, R.A.R.A. Internet of Things (IoT). J. Data Anal. Inf. Process. 2021, 9, 77–101. [Google Scholar] [CrossRef]
- Kiran, D.R. Internet of Things. In Production Planning and Control; Elsevier: Amsterdam, The Netherlands, 2019; pp. 495–513. [Google Scholar] [CrossRef]
- Singh, D. Internet of Things. In Factories of the Future; Wiley: Hoboken, NJ, USA, 2023; pp. 195–227. [Google Scholar] [CrossRef]
- Li, S.; Da Xu, L.; Zhao, S. The internet of things: A survey. Inf. Syst. Front. 2015, 17, 243–259. [Google Scholar] [CrossRef]
- Abbasi, M.; Plaza-Hernandez, M.; Prieto, J.; Corchado, J.M. Security in the Internet of Things Application Layer: Requirements, Threats, and Solutions. IEEE Access 2022, 10, 97197–97216. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Akhras, G. Smart Materials and Smart Systems for the Future. Can. Mil. J. 2000, 1, 25–31. [Google Scholar]
- Alahi, M.E.E.; Pereira-Ishak, N.; Mukhopadhyay, S.C.; Burkitt, L. An Internet-of-Things Enabled Smart Sensing System for Nitrate Monitoring. IEEE Internet Things J. 2018, 5, 4409–4417. [Google Scholar] [CrossRef]
- Pukkasenung, P.; Lilakiatsakun, W. Improved Generic Layer Model for IoT Architecture. JIST J. Inf. Sci. Technol. 2021, 11, 18–29. [Google Scholar]
- Moharkar, K.A.; Tiwari, A.A.; Bhuyar, P.N.; Bedre, P.K.; Bachwani, S.A. Review on Different Microcontroller Boards Used in IoT. Int. J. Res. Appl. Sci. Eng. Technol. 2022, 10, 234–242. [Google Scholar] [CrossRef]
- Ray, P.P. A survey on Internet of Things architectures. J. King Saud Univ. Comput. Inf. Sci. 2018, 30, 291–319. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Paul, A.; Jeyaraj, R. Internet of Things: A primer. Hum. Behav. Emerg. Technol. 2019, 1, 37–47. [Google Scholar] [CrossRef]
- Chakraborty, A.; Jindal, M.; Khosravi, M.R.; Singh, P.; Shankar, A.; Diwakar, M. A Secure IoT-Based Cloud Platform Selection Using Entropy Distance Approach and Fuzzy Set Theory. Wirel. Commun. Mob. Comput. 2021, 2021, 6697467. [Google Scholar] [CrossRef]
- Alderazi, F. Security of Internet of Things: A review of Challenges with integrating Blockchain with IoT. In Proceedings of the 2022 2nd International Conference on Computing and Information Technology, (ICCIT) 2022, Tabuk, Saudi Arabia, 25–27 January 2022; pp. 154–160. [Google Scholar] [CrossRef]
- Auer, S.; Nagler, S.; Mazumdar, S.; Mukkamala, R.R. Towards blockchain-IoT based shared mobility: Car-sharing and leasing as a case study. J. Netw. Comput. Appl. 2022, 200, 103316. [Google Scholar] [CrossRef]
- Abdelmaboud, A.; Ahmed, A.I.A.; Abaker, M.; Eisa, T.A.E.; Albasheer, H.; Ghorashi, S.A.; Karim, F.K. Blockchain for IoT Applications: Taxonomy, Platforms, Recent Advances, Challenges and Future Research Directions. Electronics 2022, 11, 630. [Google Scholar] [CrossRef]
- Cocîrlea, D.; Dobre, C.; Hîrţan, L.-A.; Purnichescu-Purtan, R. Blockchain in Intelligent Transportation Systems. Electronics 2020, 9, 1682. [Google Scholar] [CrossRef]
- Kumar, R.; Khan, F.; Kadry, S.; Rho, S. A Survey on blockchain for industrial Internet of Things. Alex. Eng. J. 2022, 61, 6001–6022. [Google Scholar] [CrossRef]
- Sheehan, A.; Beddows, A.; Gulliver, J.; Green, D.C.; Beevers, S. Estimating road vehicle speed from high-resolution satellite imagery for environmental applications: A case study of Barcelona. Remote Sens. Appl. Soc. Environ. 2025, 37, 101507. [Google Scholar] [CrossRef]
- Ye, Z.; Wei, Y.; Zhang, W.; Wang, L. An Efficient Real-Time Vehicle Monitoring Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22073–22083. [Google Scholar] [CrossRef]
- Gajingam, N.K.; Karmakar, S.; Hussain, A.M. A Portable and Flexible On-Road Sensing System for Traffic Monitoring. IEEE Sensors Lett. 2024, 8, 6014104. [Google Scholar] [CrossRef]
- Choy, J.L.C.; Wu, J.; Long, C.; Lin, Y.-B. Ubiquitous and Low Power Vehicles Speed Monitoring for Intelligent Transport Systems. IEEE Sensors J. 2020, 20, 5656–5665. [Google Scholar] [CrossRef]
- Peng, H.; Wang, Y.; Chen, Z.; Lv, Z. Dynamic Sensor Speed Measurement Algorithm and Influencing Factors of Traffic Safety With Wireless Sensor Network Nodes and RFID. IEEE Sensors J. 2020, 21, 15679–15686. [Google Scholar] [CrossRef]
- Feng, Y.; Mao, G.; Cheng, B.; Li, C.; Hui, Y.; Xu, Z.; Chen, J. MagMonitor: Vehicle Speed Estimation and Vehicle Classification Through A Magnetic Sensor. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1311–1322. [Google Scholar] [CrossRef]
- Yang, Z.; Shi, F.; Liang, H. A Portable Traffic Counting, Speed Estimation, and Classification Terminal Using IR-UWB Radar. IEEE Sensors J. 2022, 22, 13365–13374. [Google Scholar] [CrossRef]
- Tun, M.Z.; Zin, K.T. Implementation of Doppler Radar-Based Vehicle Speed Detection System. Int. J. Trend Sci. Res. Dev. 2019, 5, 1708–1713. [Google Scholar]
- Hasan, M.R.; al Banna, H.; Rayhan; Hossain, S.; Patwary, I.H.; Uddin, M.M. Design of an Automated Vehicle Speed Detector and Surveillance System for Bangladesh. In Proceedings of the 2020 2nd International Conference on Advanced Information and Communication Technology, ICAICT 2020, Dhaka, Bangladesh, 28–29 November 2020; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2020; pp. 173–177. [Google Scholar] [CrossRef]
- Thabet, H.T.H.; Al-Hilali, A.A.; Al-Safi, M.G.S.; Thabit, T.H.; Mahmood, F.M. Design and Simulation of an Affordable Vehicle Speed Detection System. In Proceedings of the ICMERALDA 2023-International Conference on Modeling and E-Information Research, Artificial Learning and Digital Applications, Karawang, Indonesia, 24 November 2023; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2023; pp. 260–265. [Google Scholar] [CrossRef]
- Priya, W.D.; Yuvaraj, S.; Sujatha, V.; Selvi, R.T. Real-Time Vehicle Speed Monitoring and Alerting System to Prevent Road Accidents. In Proceedings of the 2023 4th International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 20–22 September 2023; IEEE: New York, NY, USA, 2023; pp. 1201–1206. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, S.F. IoT Based Framework for Vehicle Over-speed Detection. In Proceedings of the 2018 1st International Conference on Computer Applications & Information Security (ICCAIS), Riyadh, Saudi Arabia, 4–6 April 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Chandan, T.H.; Nagaraju, S.; Varma, B.N.; Kumar, M.K.; Manasa, S.; Mukund, V.K. IoT based Vehicle Over-Speed Detection and Accident Avoidance System. In Proceedings of the IEEE International Conference on Disruptive Technologies for Multi-Disciplinary Research and Applications, CENTCON 2021, Bengaluru, India, 19–21 November 2021; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2021; pp. 112–117. [Google Scholar] [CrossRef]
- Reddy, R.; Devika, B.S.; Bhargava, J.C.; Lakshana, M.; Shivaraj, K. Development of IoT-Based Vehicle Speed Infringement and Alcohol Consumption Detection System. In IoT Based Control Networks and Intelligent Systems; Lecture Notes in Networks and Systems; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2024; pp. 153–163. [Google Scholar] [CrossRef]
- Kanagamalliga, S.; Nath, S.S.; Nivetha, T.; Baby Shalini, M. Enhancing Heavy Vehicle Safety with Intelligent Driver Behaviour Monitoring via Multi-Sensor Fusion and Embedded Systems. In Proceedings of the 2024 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 27–28 December 2024; IEEE: New York, NY, USA, 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Pradeepkumar; Sneha, S.; Thilakshanaa, A.; Vinoth, N.; Chandraprabha, S.; Ponnusamy, D. Real Time Automatic Vehicle Monitoring System Using IoT. In Proceedings of the 8th International Conference on Smart Structures and Systems, ICSSS 2022, Chennai, India, 21–22 April 2022. [Google Scholar] [CrossRef]
- Nimmagadda, C.P.; Talluri, N.N.; Vangala, N.; Velivela, M.; Yelike, J.; Vaddapalli, S. Smart Electric Vehicle Monitoring System Using ESP8266 and Raspberry Pi with Azure Services. In Proceedings of the 2024 2nd International Conference on Recent Trends in Microelectronics, Automation, Computing and Communications Systems (ICMACC), Hyderabad, India, 19–21 December 2024; IEEE: New York, NY, USA, 2024; pp. 447–452. [Google Scholar] [CrossRef]
- Daraghmi, Y.-A. Vehicle Speed Monitoring System Based on Edge Computing. In Proceedings of the 2021 International Conference on Promising Electronic Technologies (ICPET), Los Alamitos, CA, USA, 17–18 November 2021; IEEE: New York, NY, USA, 2021; pp. 14–18. [Google Scholar] [CrossRef]
- Sagala, A.; Putra, J.A.; Silalahi, J.K.A.; Sianipar, R.A.T. Vehicle Accident Detection System with LPWAN Technology for Information Transmission. In Proceedings of the 2023 IEEE 9th Information Technology International Seminar (ITIS), Batu Malang, Indonesia, 18–20 October 2023; IEEE: New York, NY, USA, 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Bhadange, A.; Jabade, V.; Bhattad, R.; Daga, P. A Smart Surveillance System for Video-Based Vehicle Detection and Speed Monitoring. In Proceedings of the 2024 2nd International Conference on Advancement in Computation & Computer Technologies (InCACCT), Gharuan, India, 2–3 May 2024; IEEE: New York, NY, USA, 2024; pp. 689–694. [Google Scholar] [CrossRef]
- Kim, H. Vehicle Detection and Speed Estimation for Automated Traffic Surveillance Systems at Nighttime. Teh. Vjesn. Tech. Gaz. 2019, 26, 87–94. [Google Scholar] [CrossRef]
- Yohannes, E.; Lin, C.-Y.; Shih, T.K.; Thaipisutikul, T.; Enkhbat, A.; Utaminingrum, F. An Improved Speed Estimation Using Deep Homography Transformation Regression Network on Monocular Videos. IEEE Access 2023, 11, 5955–5965. [Google Scholar] [CrossRef]
- Trivedi, J.D.; Mandalapu, S.D.; Dave, D.H. Vision-based real-time vehicle detection and vehicle speed measurement using morphology and binary logical operation. J. Ind. Inf. Integr. 2022, 27, 100280. [Google Scholar] [CrossRef]
- Ren, Y. Intelligent Vehicle Violation Detection System Under Human–Computer Interaction and Computer Vision. Int. J. Comput. Intell. Syst. 2024, 17, 40. [Google Scholar] [CrossRef]
- Vijayalakshmi, M.; Suvitha, D.; Krishna, C.G. Moving Vehicle Speed and Distance Estimation in Autonomous Vehicles. In Proceedings of the 2023 12th International Conference on Advanced Computing (ICoAC), Chennai, India, 17–19 August 2023; IEEE: New York, NY, USA, 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Rani, N.G.; Priya, N.H.; Ahilan, A.; Muthukumaran, N. LV-YOLO: Logistic vehicle speed detection and counting using deep learning-based YOLO network. Signal Image Video Process. 2024, 18, 7419–7429. [Google Scholar] [CrossRef]
- Sangsuwan, K.; Ekpanyapong, M. Video-Based Vehicle Speed Estimation Using Speed Measurement Metrics. IEEE Access 2024, 12, 4845–4858. [Google Scholar] [CrossRef]
- Tomas, J.P.Q.; Pantoja, J.D.T.; Lumugdang, C.H.; De Rosas, A.J.O. Vehicle Detection and Speed Estimation Implemented through Euclidean Algorithm. In Proceedings of the 2021 4th International Conference on Computational Intelligence and Intelligent Systems, Tokyo, Japan, 20–22 November 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Miles, V.; Gurr, F.; Giani, S. Camera-Based System for the Automatic Detection of Vehicle Axle Count and Speed Using Convolutional Neural Networks. Int. J. Intell. Transp. Syst. Res. 2022, 20, 778–792. [Google Scholar] [CrossRef]
- Alsanabani, A.; Abugabah, A.; Jiao, L. An Intelligent Application of Real Time Speed Estimation: An Enhanced Detection and Tracking Approach Towards Vehicle Speed Estimation. In Proceedings of the 2023 7th International Conference on Computing and Data Analysis, Guiyang, China, 15–17 September 2023; Association for Computing Machinery: New York, NY, USA, 2023. [Google Scholar] [CrossRef]
- Lin, C.-J.; Jeng, S.-Y.; Lioa, H.-W. A Real-Time Vehicle Counting, Speed Estimation, and Classification System Based on Virtual Detection Zone and YOLO. Math. Probl. Eng. 2021, 2021, 1577614. [Google Scholar] [CrossRef]
- Lin, C.-J.; Jhang, J.-Y. Intelligent Traffic-Monitoring System Based on YOLO and Convolutional Fuzzy Neural Networks. IEEE Access 2022, 10, 14120–14133. [Google Scholar] [CrossRef]
- Luo, Z.; Bi, Y.; Yang, X.; Li, Y.; Yu, S.; Wu, M.; Ye, Q. Enhanced YOLOv5s + DeepSORT method for highway vehicle speed detection and multi-sensor verification. Front. Phys. 2024, 12, 1371320. [Google Scholar] [CrossRef]
- Prajwal, K.; Navaneeth, P.; Tharun, K.; Kumar, M.A. Multi-Vehicle Tracking and Speed Estimation Model using Deep Learning. In Proceedings of the 2022 Fourteenth International Conference on Contemporary Computing, Noida, India, 4–6 August 2022; Association for Computing Machinery: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Dhonde, S.; Mirani, J.; Patwardhan, S.; Bhurchandi, K.M. Over-Speed and License Plate Detection of Vehicles. In Proceedings of the 2022 1st International Conference on the Paradigm Shifts in Communication, Embedded Systems, Machine Learning and Signal Processing (PCEMS), Nagpur, India, 6–7 May 2022; IEEE: New York, NY, USA, 2022; pp. 113–118. [Google Scholar] [CrossRef]
- Ahmad, F.; Ansari, M.Z.; Hamid, S.; Saad, M. A Computer Vision based Vehicle Counting and Speed Detection System. In Proceedings of the 2023 International Conference on Recent Advances in Electrical, Electronics & Digital Healthcare Technologies (REEDCON), New Delhi, India, 1–3 May 2023; IEEE: New York, NY, USA, 2023; pp. 487–492. [Google Scholar] [CrossRef]
- Ashraf, M.H.; Jabeen, F.; Alghamdi, H.; Zia, M.; Almutairi, M.S. HVD-Net: A Hybrid Vehicle Detection Network for Vision-Based Vehicle Tracking and Speed Estimation. J. King Saud Univ.-Comput. Inf. Sci. 2023, 35, 101657. [Google Scholar] [CrossRef]
- García-Aguilar, I.; García-González, J.; Medina, D.; Luque-Baena, R.M.; Domínguez, E.; López-Rubio, E. Detection of dangerously approaching vehicles over onboard cameras by speed estimation from apparent size. Neurocomputing 2024, 567, 127057. [Google Scholar] [CrossRef]
- Ping, A.; Xue, Y.; Yao, B.; Xiao, S.; Zhang, X.; Li, L. Research on Improved YOLOv7 Based Vehicle Speed and Traffic Flow Detection System. In Frontiers in Artificial Intelligence and Applications; IOS: Amsterdam, The Netherlands, 2023. [Google Scholar] [CrossRef]
- Shaqib, S.; Alo, A.P.; Ramit, S.S.; Rupak, A.U.H.; Khan, S.S.; Rahman, M.S. Vehicle Speed Detection System Utilizing YOLOv8: Enhancing Road Safety and Traffic Management for Metropolitan Areas. arXiv 2024, arXiv:2406.07710. [Google Scholar]
- Delmo, J.A.B. Deep Learning-Based Vehicle Speed Estimation in Bidirectional Traffic Lanes. Procedia Comput. Sci. 2025, 252, 222–230. [Google Scholar] [CrossRef]
- Mouafo, D.; Biaou, U. Uncalibrated camera approach for vehicle speed estimation using detection and tracking. Signal Image Video Process. 2024, 18, 8819–8827. [Google Scholar] [CrossRef]
- Kamil, D.A.; Wahyono, A.; Harjoko, A.; Jo, K.-H. Vehicle Speed Estimation Using Consecutive Frame Approaches and Deep Image Homography for Image Rectification on Monocular Videos. IEEE Access 2024, 12, 181937–181952. [Google Scholar] [CrossRef]
- Singh, A.; Rahma, M.Z.U.; Rani, P.; Agrawal, N.K.; Sharma, R.; Kariri, E.; Aray, D.G. Smart Traffic Monitoring Through Real-Time Moving Vehicle Detection Using Deep Learning via Aerial Images for Consumer Application. IEEE Trans. Consum. Electron. 2024, 70, 7302–7309. [Google Scholar] [CrossRef]
- Sakthi, U.; Badoni, S.; Sai, S. Real-Time Lane Detection and Vehicle Speed Prediction for Intelligent Transportation Systems. In Proceedings of the 2024 International Conference on Sustainable Communication Networks and Application (ICSCNA), Theni, India, 11–13 December 2024; IEEE: New York, NY, USA, 2024; pp. 830–838. [Google Scholar] [CrossRef]
- Balamuralidhar, N.; Tilon, S.; Nex, F. MultEYE: Monitoring System for Real-Time Vehicle Detection, Tracking and Speed Estimation from UAV Imagery on Edge-Computing Platforms. Remote. Sens. 2021, 13, 573. [Google Scholar] [CrossRef]
- Moshayedi, A.J.; Roy, A.S.; Taravet, A.; Liao, L.; Wu, J.; Gheisari, M. A Secure Traffic Police Remote Sensing Approach via a Deep Learning-Based Low-Altitude Vehicle Speed Detector through UAVs in Smart Cites: Algorithm, Implementation and Evaluation. Future Transp. 2023, 3, 189–209. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.; Zhang, F.; Li, E.; Yang, T.; Lu, Z. An Adaptive Framework for Multi-Vehicle Ground Speed Estimation in Airborne Videos. Remote Sens. 2019, 11, 1241. [Google Scholar] [CrossRef]
- Yi, J.; Guan, B.; Li, P. Intelligent Highway Speed Monitoring UAV System Based on Deep Learning. In Proceedings of the 2021 4th International Conference on Image and Graphics Processing, Sanya, China, 1–3 January 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Bakirci, M.; Bayraktar, I. Integrating UAV-Based Aerial Monitoring and SSD for Enhanced Traffic Management in Smart Cities. In Proceedings of the 2024 Mediterranean Smart Cities Conference (MSCC), Tetuan, Morocco, 2–4 May 2024; IEEE: New York, NY, USA, 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmed, M.W.; Adnan, M.; Ahmed, M.; Janssens, D.; Wets, G.; Ahmed, A.; Ectors, W. From Stationary to Nonstationary UAVs: Deep-Learning-Based Method for Vehicle Speed Estimation. Algorithms 2024, 17, 558. [Google Scholar] [CrossRef]
- Lashkov, I.; Yuan, R.; Zhang, G. Edge-Computing-Empowered Vehicle Tracking and Speed Estimation Against Strong Image Vibrations Using Surveillance Monocular Camera. IEEE Trans. Intell. Transp. Syst. 2023, 24, 13486–13502. [Google Scholar] [CrossRef]
- Shah, A.; Vasant, A. An Elaborative Study on Vehicle Speed Detection and Tracking. Int. J. Intell. Syst. Appl. Eng. 2022, 10, 240–245. [Google Scholar]
- Kurniawan, A.; Ramadlan, A.; Yuniarno, E.M. Speed Monitoring for Multiple Vehicle Using Closed Circuit Television (CCTV) Camera. In Proceedings of the 2018 International Conference on Computer Engineering, Network and Intelligent Multimedia (CENIM), Surabaya, Indonesia, 26–27 November 2018; IEEE: New York, NY, USA, 2018; pp. 88–93. [Google Scholar] [CrossRef]
- Martínez, A.H.; Llorca, D.F.; Daza, I.G. Towards View-Invariant Vehicle Speed Detection from Driving Simulator Images. arXiv 2022, arXiv:2206.00343. [Google Scholar]
- Bin Ashraf, F.; Reaz, R. IoT-Blockchain in Remote Patient Monitoring. In Proceedings of the 5th International Conference on Future Networks and Distributed Systems, Dubai, United Arab Emirates, 15–16 December 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 186–194. [Google Scholar] [CrossRef]
- Bataineh, M.R.; Mardini, W.; Khamayseh, Y.M.; Yassein, M.M.B. Novel and Secure Blockchain Framework for Health Applications in IoT. IEEE Access 2022, 10, 14914–14926. [Google Scholar] [CrossRef]
- Chacko, N.M.; Narendra, V.G.; Balachandra, M.; Rathinam, S. Exploring IoT-Blockchain Integration in Agriculture: An Experimental Study. IEEE Access 2023, 11, 130439–130450. [Google Scholar] [CrossRef]
- Aggarwal, V.K.; Sharma, N.; Kaushik, I.; Bhushan, B.; Himanshu. Integration of Blockchain and IoT (B-IoT): Architecture, Solutions, & Future Research Direction. In IOP Conference Series: Materials Science and Engineering; IOP Publishing Ltd.: Bristol, UK, 2021. [Google Scholar] [CrossRef]
- Dabbagh, M.; Kakavand, M.; Tahir, M. Towards integration of blockchain and IoT: A bibliometric analysis of state-of-the-art. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; pp. 27–35. [Google Scholar] [CrossRef]
- Chen, J.; Xu, S.; Liu, K.; Yao, S.; Luo, X.; Wu, H. Intelligent Transportation Logistics Optimal Warehouse Location Method Based on Internet of Things and Blockchain Technology. Sensors 2022, 22, 1544. [Google Scholar] [CrossRef]
- Azbeg, K.; Ouchetto, O.; Andaloussi, S.J. BlockMedCare: A healthcare system based on IoT, Blockchain and IPFS for data management security. Egypt. Inform. J. 2022, 23, 329–343. [Google Scholar] [CrossRef]
- Ahsan, M.; Haider, J.; McManis, J.; Hashmi, M.S.J. Developing intelligent software interface for wireless monitoring of vehicle speed and management of associated data. IET Wirel. Sens. Syst. 2016, 6, 90–99. [Google Scholar] [CrossRef]
- Lam, N.G. Vehicle Speed Measurement Using Doppler Effect, Vaasan Ammattikorkeakoulu University of Applied Sciences. Available online: https://www.theseus.fi/bitstream/handle/10024/496044/Thesis.pdf?sequence=2 (accessed on 9 February 2025).
- Patel, C.; Shah, D.; Patel, A. Automatic Number Plate Recognition System (ANPR): A Survey. Int. J. Comput. Appl. 2013, 69, 21–33. [Google Scholar] [CrossRef]
- OpenCV. About OpenCV. Available online: https://opencv.org/about/ (accessed on 21 April 2023).
- Hyperledger Foundation. Hyperledger Fabric Gateway API (Node.js). Available online: https://hyperledger.github.io/fabric-gateway/main/api/node/ (accessed on 19 February 2025).









| S/n | Objectives | Research Questions | Methodology |
|---|---|---|---|
| i. | To review vehicle speed detection methods. | What are the strengths and weaknesses of the existing vehicle speed detection methods? | Literature review |
| ii. | To review technologies for implementing vehicle speed detection systems. | Which technologies can be used to implement smart and transparent vehicle speed detection systems? | Literature review |
| iii. | To review existing vehicle speed detection systems. | What are the strengths and weaknesses of existing vehicle speed detection systems? | Literature review |
| iv | To propose the implementation of a smart and transparent vehicle speed detection system compatible with developing countries’ environment. | How can the weakness of the existing vehicle speed detection systems be addressed to implement a system compatible with developing countries’ environments? | Literature review and brainstorming with domain and technology experts. |
| Technique | Working Principle | Advantages | Disadvantages |
|---|---|---|---|
| Pneumatic tubes [31,32,35] | Based on the principle of pressure changes caused when a vehicle passes over a pair of tubes. Speed is estimated based on time taken and distance between the tubes. | Also counts and categorizes vehicles. Lightweight and portable. Cost-effective, sensitive to detect motorcycles, consumes low power, and is weatherproof. | Vulnerable to damages and requires periodic maintenance. Tubes are visible, influencing driving behaviors. |
| Piezoelectric [32,36,39] | Works on the principle of conversion of mechanical to electrical energy. Speed is measured from the amplitude and frequency of the potential difference produced by the pressure exerted by the passing vehicle. | Cheapest in terms of maintenance cost and time. Easy to install. | The method is sensitive to temperature and influences driving behavior because it is visible to road users. |
| Inductive Detector Loop [32,37,38,40] | As the vehicle passes over the dual IDL, the metal content of the vehicle affects the inductance of the loop and is detected. Distance and time to travel between the two IDL points are used to calculate speed. | Also, collects count and occupancy data. IDL is cheap, fast in data processing, and not affected by weather conditions. | Poor response of the IDL at times. Accuracy issues when operating under congestion and maintenance costs. |
| Technique | Working Principle | Advantages | Disadvantages |
|---|---|---|---|
| Vision-Based Method [34,39,42] | Leverages advancements in cameras, image processing techniques, and computing devices to analyze video frames to track vehicles and measure their speed. | Cost reduction and the possibility of using already existing traffic cameras | High computational cost. Not matured technology, accuracy issues at night time, and affected by harsh weather conditions. |
| Radar-Based Method [36,39,43]. | Works by sending radio signals, which are reflected to the source device upon hitting the target object. The difference in returning signals is used to compute vehicles’ instantaneous speed by using the Doppler principle. | Matured technology, not affected by weather conditions, can work during the day and night. Easiest, fastest, and one of the most accurate methods capable of capturing the speed of vehicles traveling in both road directions. | It captures all vehicles in range, including untargeted vehicles. |
| Laser-Based Method [45,46]. | Uses laser beams to capture the instantaneous speed of the vehicle. The device emits a beam of laser that is reflected. The time taken by the beam to travel and return is translated to speed. | Reliable and durable measurements. Useful for measuring speed, counting, and classifying vehicles. | Sensitive to weather conditions such as humidity and precipitation. |
| Ultrasonic-Based Method [19,47] | Works in the same way as a radar and laser. The fundamental difference is that it uses sound waves instead of radio or laser. | These methods are inexpensive options and are mostly used in vehicle detection. | Performance is affected by environmental conditions and is not well suited for speed measurement. |
| Infrared (Active and Passive)-Based Method [19,25,47] | Active infrared works in the same way as ultrasonic but uses light signals. Passive infrared uses two sensors; distance and time taken to travel between them are used to measure speed. | These methods are inexpensive options and are mostly used in vehicle detection. | Performance is affected by environmental conditions and is not well suited for speed measurement. |
| Technique | Working Principle | Advantages | Disadvantages |
|---|---|---|---|
| RFID-Based Method [31,49]. | Vehicles are equipped with RFID tags. Readers are installed at road points to detect tags. Travel time between two readers determines speed. | Low-cost and suitable for positional speed measurement. | Requires more tedious work to install and maintain RFID readers at road points. |
| GPS-Based Method [28,48] | Uses a GPS module equipped within the vehicle for continuous speed measurement. | Low-cost, uses existing GPS network, and provides location and road speed limit information. | Suitable for specific vehicle types such as trucks. Requires consent of driver or owner and raises privacy issues. |
| GSM-Based Method [28,48] | Uses a mobile phone connected to a GSM network for continuous speed measurement. | Low-cost, uses the existing GSM network. | Limited to particular vehicles such as taxis. Needs consent of the driver or owner and raises privacy concerns. |
| S/n | Research Question | Research Answers | Contributions |
|---|---|---|---|
| i. | What are the strengths and weaknesses of current vehicle speed detection methods? | Section 2 provides a detailed discussion of the operating principles, strengths, and weaknesses of vehicle speed detection methods; Figure 2 illustrates the taxonomy of vehicle speed detection techniques. Table 2 and Table 3 summarize road-based intrusive and non-intrusive methods, respectively, while Table 4 presents an overview of vehicle-based speed detection systems. These summaries serve as a reference for selecting appropriate speed detection methods. |
|
| ii. | Which technologies can be used to implement a smart and transparent vehicle speed detection system? | An innovative integration of IoT and AI within cloud computing is proposed to enable system interconnection and intelligent functionalities, while blockchain is introduced to enhance data security and transparency, as discussed in Section 3. | Proposed technology integration for implementing smart and transparent vehicle speed detection systems. |
| iii. | What are the strengths and weaknesses of existing vehicle speed detection systems? | Accuracy concerns, lack of transparency, and high costs are the primary weaknesses of existing systems. These issues stem from the reliance on expensive, immature, and unstable speed measurement methods, and centralized cloud computing for data processing and storage, as detailed in Section 4. | A comparison of existing systems with the proposed systems highlights the research gap in ensuring accuracy, transparency, and cost-effectiveness by integrating emerging technologies and utilizing more accurate and reliable sensing technologies. |
| iv | How can the weakness of the existing vehicle speed detection systems be addressed to implement a system compatible with developing countries? | The Internet of Things is proposed for data collection and transmission, AI techniques in cloud computing for data pre-processing, and blockchain technology for security and transparency. Application layer for application-specific processing and sharing. |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Njuu, K.T.; Runyoro, A.-A.K.; Dida, M.A. Towards a Smart and Transparent Road-Based Vehicle Speed Detection System in Tanzanian Highways: A Review of Methods, Technologies, and Systems. Future Transp. 2025, 5, 45. https://doi.org/10.3390/futuretransp5020045
Njuu KT, Runyoro A-AK, Dida MA. Towards a Smart and Transparent Road-Based Vehicle Speed Detection System in Tanzanian Highways: A Review of Methods, Technologies, and Systems. Future Transportation. 2025; 5(2):45. https://doi.org/10.3390/futuretransp5020045
Chicago/Turabian StyleNjuu, Kevin T., Angela-Aida K. Runyoro, and Mussa A. Dida. 2025. "Towards a Smart and Transparent Road-Based Vehicle Speed Detection System in Tanzanian Highways: A Review of Methods, Technologies, and Systems" Future Transportation 5, no. 2: 45. https://doi.org/10.3390/futuretransp5020045
APA StyleNjuu, K. T., Runyoro, A.-A. K., & Dida, M. A. (2025). Towards a Smart and Transparent Road-Based Vehicle Speed Detection System in Tanzanian Highways: A Review of Methods, Technologies, and Systems. Future Transportation, 5(2), 45. https://doi.org/10.3390/futuretransp5020045