
Legal Framework for Rear-End Crashes in Mixed-Traffic Platooning: A Matrix Game Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Work
1.2. Contributions of This Paper
- We propose a legal framework that incorporates liability rules to the rear-end crash problems in mixed-traffic platoons.
- We leverage a matrix game approach for the rear-end crash problem to model interactions in three vehicle-encounter scenarios: HV-HV, AV-HV, and AV-AV scenarios.
- We perform sensitivity analysis and investigate what factors may impact the equilibrium results of the rear-end crash game.
2. Preliminaries
2.1. Rear-End Crash in a Platoon
2.2. Liability Rule
- No-fault rule [30]: The rule was first utilized to determine crash loss between automobiles in New York state. It is applied to any cyclist, pedestrian, passenger, or driver injured by a motor vehicle. There are now 12 states adopting the no-fault rule. The crash loss L is assigned to drivers, regardless of who is at fault in a car crash. Mathematically,
- Contributory rule [22]: The crash loss L is assigned to drivers according to the regime of negligence and non-negligence. We adopt the reaction time r to define the regime. Mathematically,is a baseline to identify negligence and non-negligence conditions according to drivers’ reaction times. In this work, we assume , which is the average reaction time in brake-to-stop events obtained from real-world scenarios [12].
3. Matrix Game Approach
3.1. Assumptions
- The rear-end crash only happens between two vehicles. Crashes among three or more vehicles are not considered in this work.
- Vehicle are not involved in the crash. They are non-strategic players whose reaction times are predetermined.
- All vehicles in the car platoon share the same initial velocity, break rate, and headway. We have: .
- Players in different encounter scenarios know whether their opponents are HVs or AVs. In other words, an AV’s reaction time in one scenario does not affect its choice in other scenarios. This is different from the assumption [14] that the decision making of AVs is predetermined by an AV manufacturer.
3.2. Game Formulation
- Players: Human drivers play a symmetric matrix game.
- Decision variables: Reaction time measures the level of precaution (i.e., care level [12,14]) for drivers when navigating roads. and represent the reaction time of human drivers for car and car N, respectively. is a discrete feasible set for players. indicates risk-averse behavior with a short reaction time, and is risk-prone behavior with a long reaction time.
- Utility: The utility of drivers in the rear-end crash captures the effects of reaction time, and the crash loss assigned to drivers. and represent the utility of drivers in cars and N, respectively. We havewhere and are trade-off coefficients in the utility function. is the utility function with respect to players’ reaction times. satisfies following properties [14]: (1) . (2) , indicating that the marginal utility decreases as the reaction time r increases.
- Payoff Matrix: Given players’ decision variables and utility functions, we can formulate the payoff matrix for cars and N in the HH scenario as follows:
Car N Car - Game Equilibrium: At equilibrium, no human drivers can improve the utility by unilaterally changing the reaction time.
- Players: An AV and an HV play an asymmetric matrix game. Note that there are two cases in the AH scenario: (car , car N) is (HV, AV) and (car , car N) is (AV, HV). For simplicity, we present the case when (car , car N) is (HV, AV) in this section. In numerical experiments, we investigate both cases.
- Decision variables: and denote the reaction time. and , indicate risk-averse and risk-prone behaviors, respectively.
- Utility: The utility of cars and N is given by:where and are trade-off coefficients in the utility function.
- Payoff Matrix: Given players’ decision variables and utility functions, we can formulate the payoff matrix for cars and N in the AH scenario as follows:
Car N Car - Game Equilibrium: At equilibrium, no HV or AV can improve the utility by unilaterally changing reaction time.
- Players: Two AVs play a symmetric game.
- Decision variables: denote the reaction time of AVs.
- Utility: The utility of cars and N is given by:
- Payoff Matrix: Given players’ decision variables and utility functions, we can formulate the payoff matrix for cars and N in the AA scenario as follows:
Car N Car - Game Equilibrium: At equilibrium, no AVs can improve the utility by unilaterally changing reaction time.
- 2.
- Mixed Nash equilibrium may exist in the rear-end crash game. For example, the mixed Nash equilibrium for an AV is to choose action with probability p and with probability . We then use the average policy to denote the equilibrium for the AV, i.e., .
3.3. Performance Measure
4. Numerical Experiments
- How do liability rules impact the equilibrium results in rear-end crash games?
- Under what circumstances does a moral hazard exist for human drivers in the platoon?
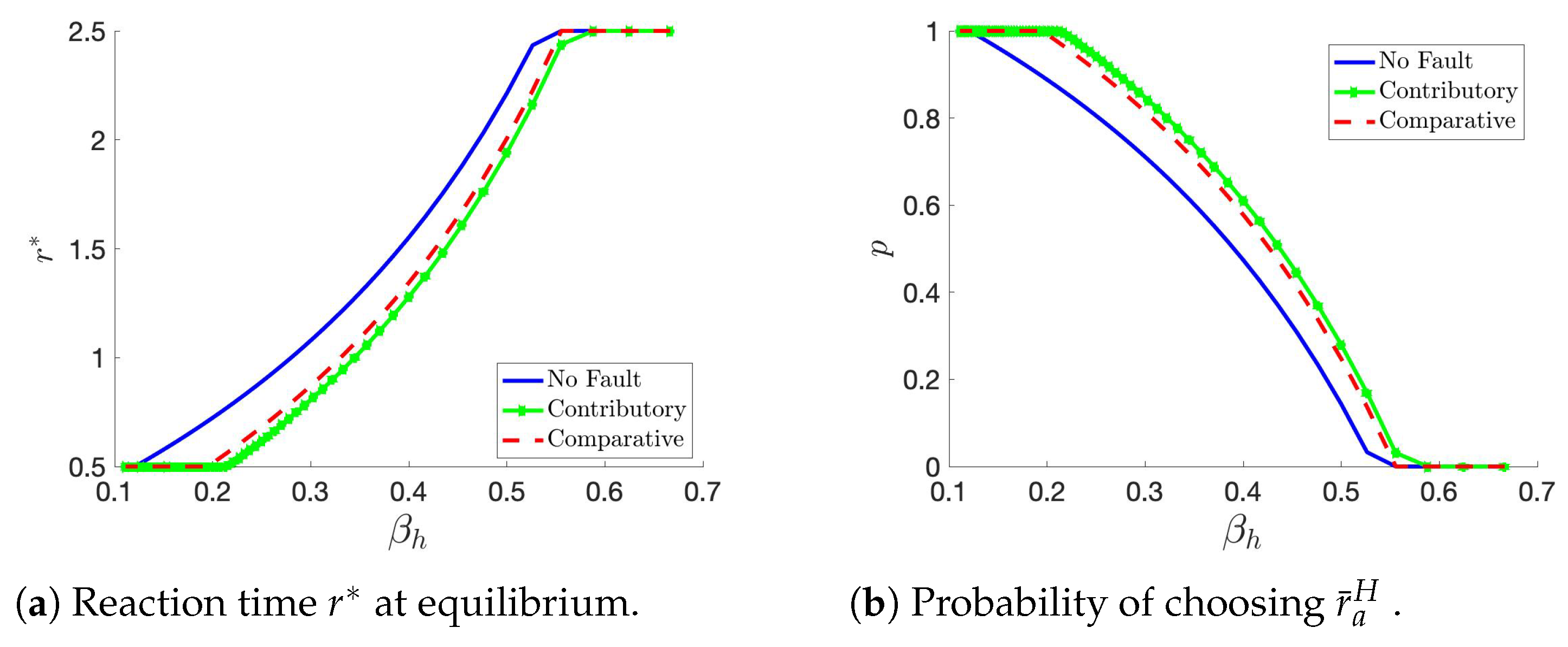
- What factors may influence the reaction time of HVs and AVs at equilibrium?
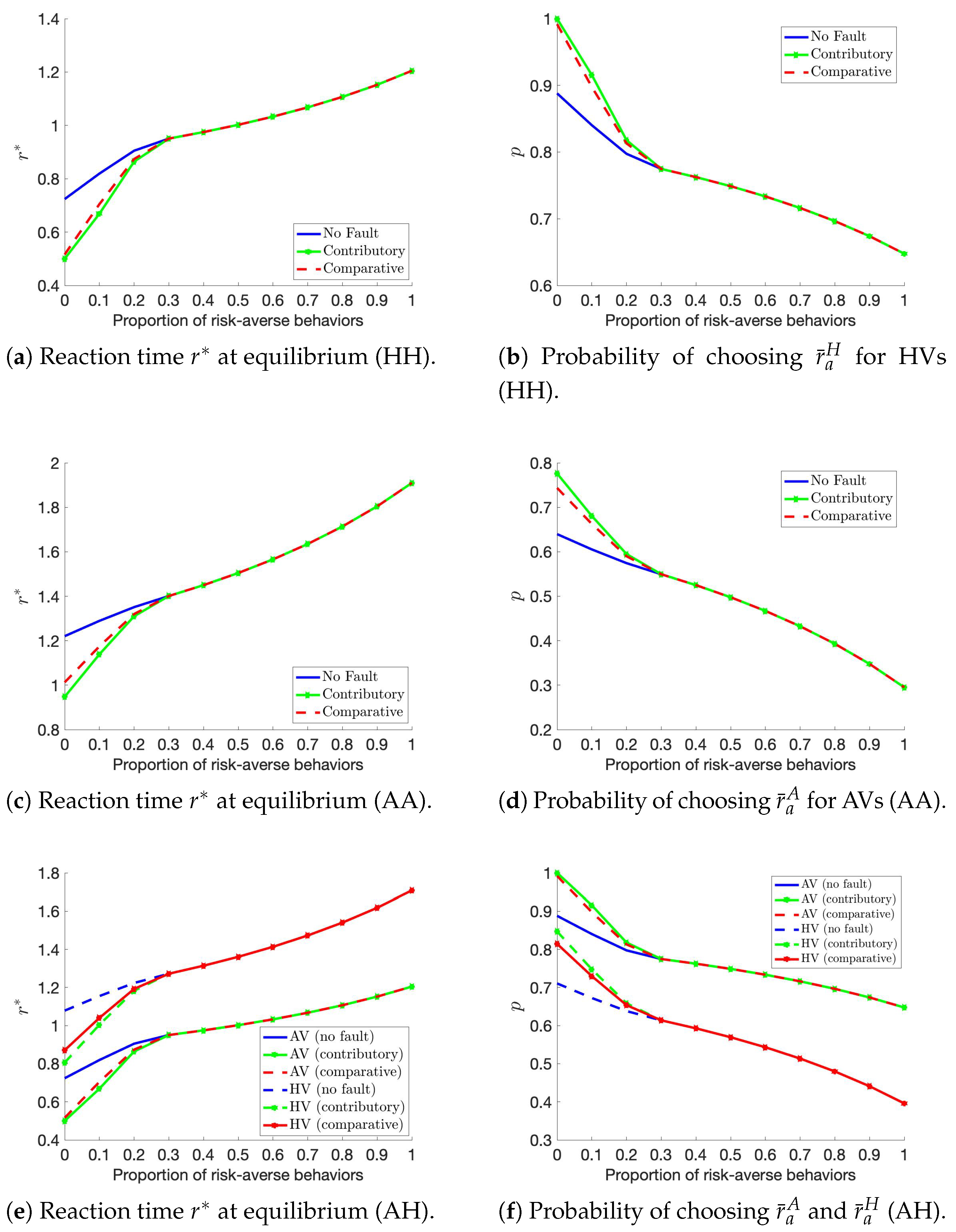
- There exists moral hazards for human drivers if risk-averse drivers are in the platoon. This is mainly because risk-averse drivers enlarge the available stopping distance, making drivers in the following vehicles less cautious in brake-to-stop events.
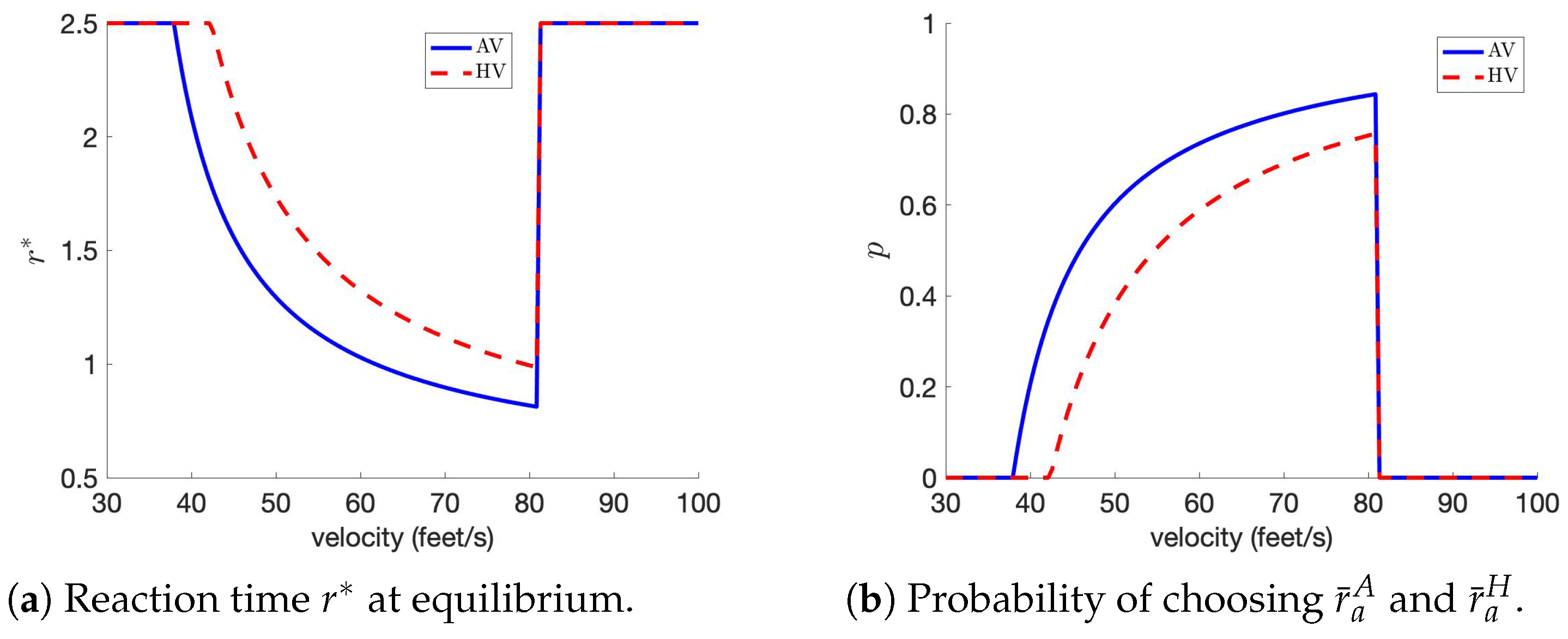
- Compared to HVs, AVs execute a smaller reaction time in rear-end crashes, indicating that AVs are more conservative than HVs. Human drivers tend to be less attentive by increasing their reaction time when encountering AVs.
- Compared to the no-fault rule, contributory and comparative rules make road users have more incentives to reduce their reaction time and improve the road safety in platooning.
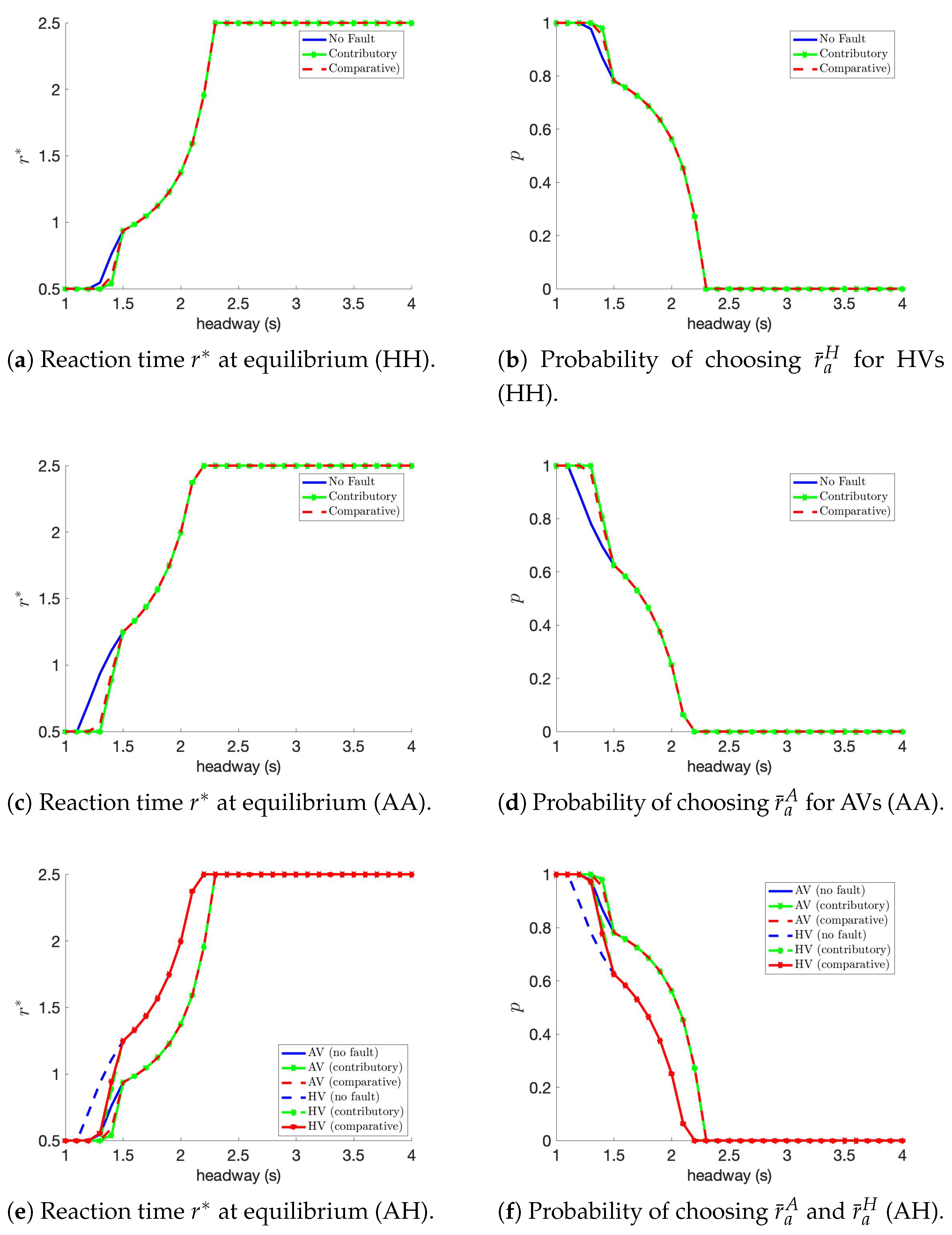
- The reaction time at equilibrium has a positive relationship with the headway in the car platoon. A longer headway creates a safer driving environment where a longer reaction time can be executed.
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Di, X.; Shi, R. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning. Transp. Res. Part C Emerg. Technol. 2021, 125, 103008. [Google Scholar] [CrossRef]
- Naus, G.J.; Vugts, R.P.; Ploeg, J.; van de Molengraft, M.J.; Steinbuch, M. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Trans. Veh. Technol. 2010, 59, 4268–4279. [Google Scholar] [CrossRef]
- Ploeg, J.; Scheepers, B.T.; Van Nunen, E.; Van de Wouw, N.; Nijmeijer, H. Design and experimental evaluation of cooperative adaptive cruise control. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 260–265. [Google Scholar]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- Shou, Z.; Chen, X.; Fu, Y.; Di, X. Multi-agent reinforcement learning for Markov routing games: A new modeling paradigm for dynamic traffic assignment. Transp. Res. Part C Emerg. Technol. 2022, 137, 103560. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Jin, I.G.; Orosz, G. Dynamics of connected vehicle systems with delayed acceleration feedback. Transp. Res. Part C Emerg. Technol. 2014, 46, 46–64. [Google Scholar]
- Chen, X.; Li, Z.; Di, X. Social Learning In Markov Games: Empowering Autonomous Driving. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Virtual, 5–9 June 2022; pp. 478–483. [Google Scholar] [CrossRef]
- Pedersen, P.A. A Game Theoretical Approach to Road Safety; Technical Report; Department of Economics Discussion Paper, University of Kent: Canterbury, UK, 2001. [Google Scholar]
- Pedersen, P.A. Moral hazard in traffic games. J. Transp. Econ. Policy (JTEP) 2003, 37, 47–68. [Google Scholar]
- Chatterjee, I.; Davis, G. Evolutionary game theoretic approach to rear-end events on congested freeway. Transp. Res. Rec. J. Transp. Res. Board 2013, 2386, 121–127. [Google Scholar] [CrossRef]
- Chatterjee, I. Understanding Driver Contributions to Rear-End Crashes on Congested Freeways and their Implications for Future Safety Measures. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2016. [Google Scholar]
- Millard-Ball, A. Pedestrians, autonomous vehicles, and cities. J. Plan. Educ. Res. 2016, 38, 0739456X16675674. [Google Scholar] [CrossRef]
- Di, X.; Chen, X.; Talley, E. Liability design for autonomous vehicles and human-driven vehicles: A hierarchical game-theoretic approach. Transp. Res. Part C Emerg. Technol. 2020, 118, 102710. [Google Scholar] [CrossRef]
- Brill, A.E. A Car-Following Model Relating Reaction Times and Temporal Headways to Accident Frequency. Transp. Sci. 1972, 6, 343–353. [Google Scholar] [CrossRef]
- A Davis, G.; Swenson, T. Collective responsibility for freeway rear-ending accidents?. An application of probabilistic causal models. Accid. Anal. Prev. 2006, 38, 728–736. [Google Scholar] [CrossRef] [PubMed]
- Parisi, F.; Fon, V. Comparative Causation. Am. Law Econ. Rev. 2004, 6, 345–368. [Google Scholar] [CrossRef]
- James, F., Jr. Accident Liability Reconsidered: The Impact of Liability Insurance. Yale Law J. 1948, 4, 549. [Google Scholar] [CrossRef]
- Douglas, G. Baird, Robert Gertner, R.P. Game Theory and the Law; Harvard University Press: Cambridge, MA, USA, 1998. [Google Scholar]
- NOLO. Is Fault Automatic in a Rear-End Car Accident Case? Available online: https://www.nolo.com/legal-encyclopedia/is-fault-automatic-rear-end-car-accident-case.html (accessed on 1 March 2022).
- Friedman; Talley, E.L. Automatorts: How Should Accident Law Adapt to Autonomous Vehicles? Lessons from Law and Economics, 2019. Available online: https://hooverip2.org/wp-content/uploads/ip2-19002-paper.pdf (accessed on 1 March 2022).
- Kim, J.; Feldman, A. Victim or injurer, small car or SUV: Tort liability rules under role-type uncertainty. Int. Rev. Law Econ. 2006, 26, 455–477. [Google Scholar] [CrossRef]
- De Mot, J. Comparative versus Contributory Negligence: A Comparison of the Litigation Expenditures. Int. Rev. Law Econ. 2012, 33, 54–61. [Google Scholar] [CrossRef]
- Schwartz, G.T. Contributory and Comparative Negligence: A Reappraisal. Yale Law J. 1978, 87, 697. [Google Scholar] [CrossRef]
- White, M. An Empirical Test of the Comparative and Contributory Negligence Rules in Accident Law. RAND J. Econ. 1989, 20, 308–330. [Google Scholar] [CrossRef]
- Anderson, J.M.; Nidhi, K.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Shavell, S. Liability for accidents. Handb. Law Econ. 2007, 1, 139–182. [Google Scholar]
- Shavell, S. Foundations of Economic Analysis of Law; Harvard University Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Geistfeld, M. A roadmap for autonomous vehicles: State tort liability, automobile insurance, and federal safety regulation. Calif. Law Rev. 2017, 105, 1611–1694. [Google Scholar] [CrossRef]
- Cole, C.; Eastman, K.L.; Macpherson, D.; F. Maroney, P.; Mccullough, K. The Impact of No-Fault Legislation on Automobile Insurance. N. Am. Actuar. J. 2009, 16, 306–322. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Di, X. Legal Framework for Rear-End Crashes in Mixed-Traffic Platooning: A Matrix Game Approach. Future Transp. 2023, 3, 417-428. https://doi.org/10.3390/futuretransp3020025
Chen X, Di X. Legal Framework for Rear-End Crashes in Mixed-Traffic Platooning: A Matrix Game Approach. Future Transportation. 2023; 3(2):417-428. https://doi.org/10.3390/futuretransp3020025
Chicago/Turabian StyleChen, Xu, and Xuan Di. 2023. "Legal Framework for Rear-End Crashes in Mixed-Traffic Platooning: A Matrix Game Approach" Future Transportation 3, no. 2: 417-428. https://doi.org/10.3390/futuretransp3020025
APA StyleChen, X., & Di, X. (2023). Legal Framework for Rear-End Crashes in Mixed-Traffic Platooning: A Matrix Game Approach. Future Transportation, 3(2), 417-428. https://doi.org/10.3390/futuretransp3020025