



Assessment of Personal Rapid Transit System Configurations Regarding Efficiency and Service Quality



Abstract
:1. Introduction
1.1. Related Literature
1.2. Research Motivation and Objectives
2. Case Study
2.1. Study Area and Scenario
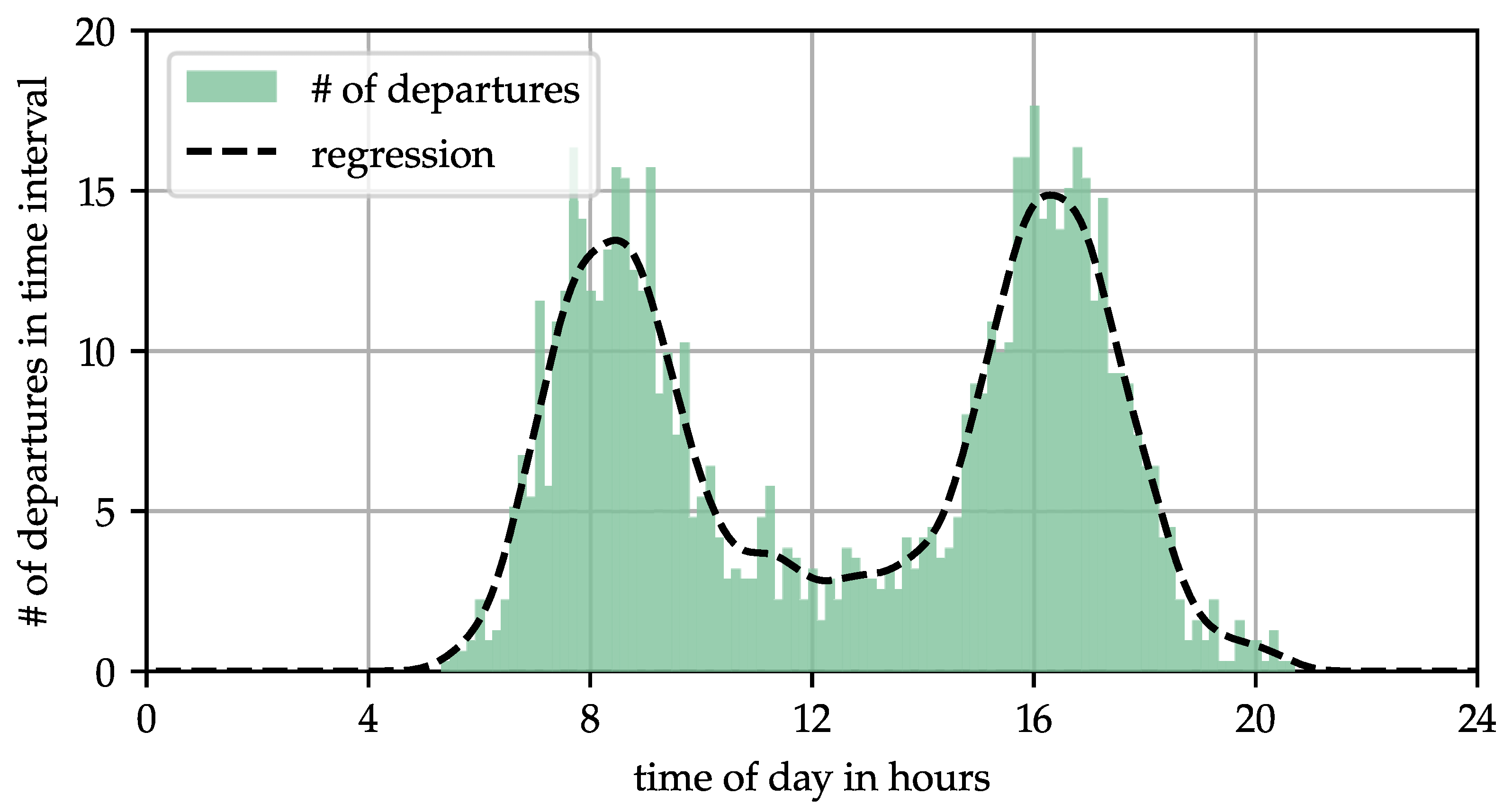
2.2. Travel Demand
2.3. Station Locations and Graph of the Network
3. System Simulation
3.1. Vehicles
3.2. Stations
3.3. Merges
3.4. Fleet Organization/Operation
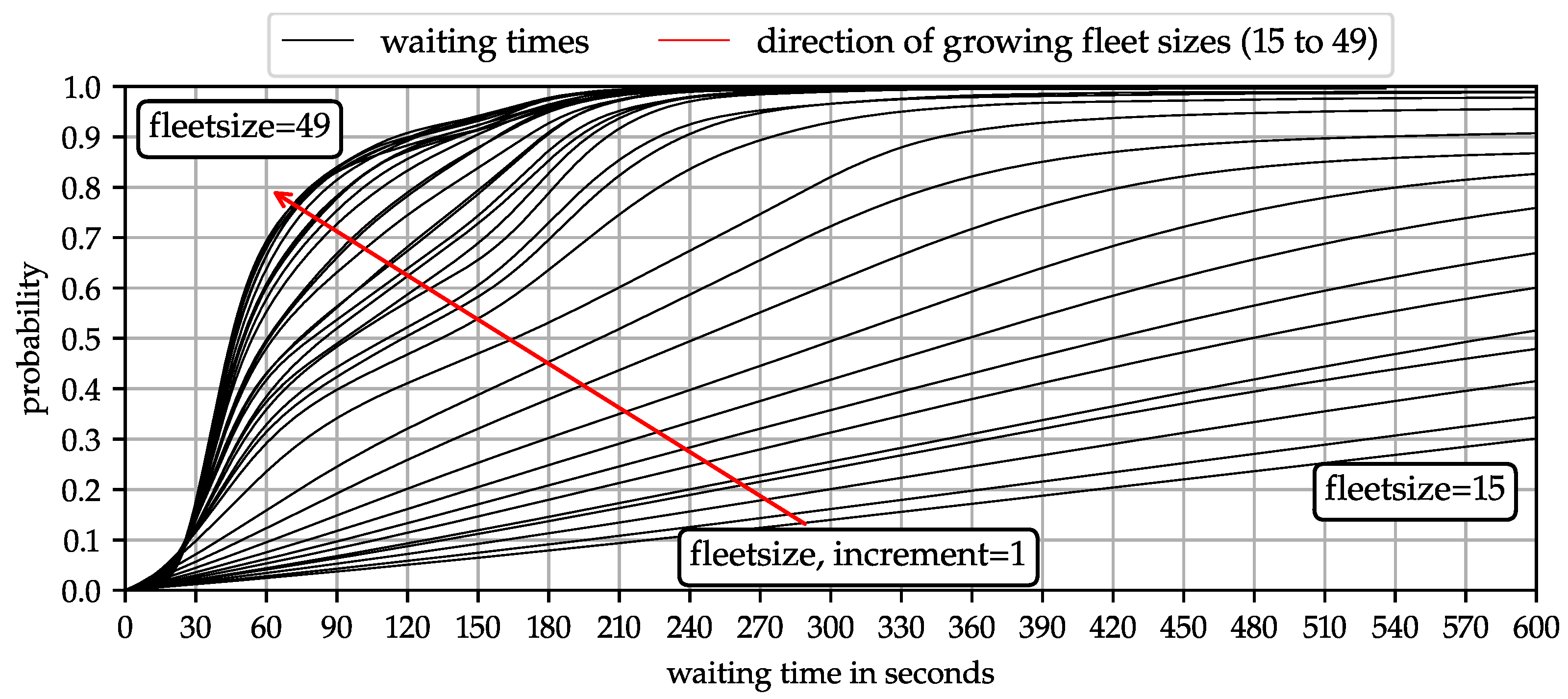
3.4.1. Fleetsize
3.4.2. Dispatching
- nearest idle taxi (NIT): new requests from customers are assigned to the closest vehicle in a first-in-first-out manner. Implemented in SUMO under the designation greedy [43].
- nearest open request (NOR): vehicles becoming idle are assigned to the closest open request. Implemented in SUMO under the designation greedyClosest [43].
3.4.3. Empty Vehicle Movement
- random idling (RI): vehicles drive around the network randomly until they are assigned to the next customer (implemented in SUMO [43]).
- go do depot (GTD): vehicles park in the depot in case they are unassigned.
- park closest + random idling (PC+RI): vehicles park at the closest station that provides available parking berths. In case all berths are occupied, vehicles will idle randomly.
- park closest + go to depot (PC+GTD): Vehicles park at the closest station that provides available parking berths. In case all berths are occupied, vehicles go to the depot.
3.5. Simulation Parameters
3.6. Evaluation
4. Results
4.1. Fleetsize Effects on Customer Waiting Time
4.2. Operating Strategy and Fleetsize
4.3. Number of Berths and Fleetsize
4.4. Dispatching Strategy
5. Summary and Conclusions
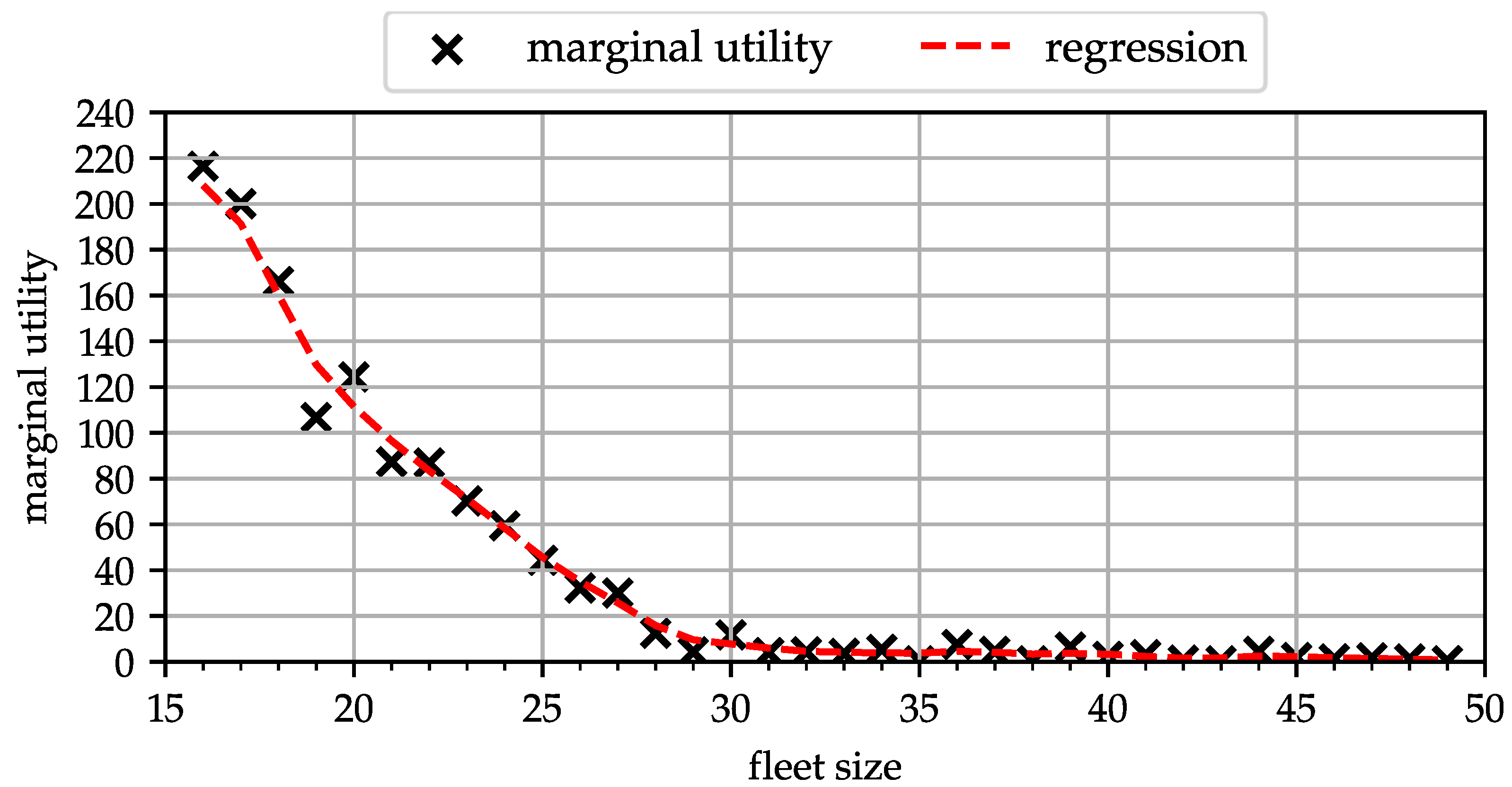
- The benefit of increasing the fleetsize is limited. The threshold can be assessed by calculating its marginal utility.
- The number of berths has relatively little impact on the efficiency and service quality compared to the operating strategy and fleetsize.
- Random idling is necessary when minimal waiting times are a priority.
- Comparable results regarding the efficiency and service quality can be achieved with different PRT system configurations with regard to the fleetsize, number of berths, and operating strategy.
6. Discussion
6.1. Limitations
6.2. Future Research Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
- The following abbreviations are used in this manuscript:
| AV | autonomous vehicle |
| CDF | cummulative distribution function |
| GTD | go do depot |
| LRT | light rail transit |
| NIT | nearest idle taxi |
| NOR | nearest open request |
| ODM | origin destination matrix |
| OSM | open street map |
| PC+GTD | park closest + go to depot |
| PC+RI | park closest + random idling |
| PRT | personal rapid transit |
| PT | public transport |
| RI | random idling |
| SUMO | Simulation of Urban Mobility |
References
- Edward, A.J. Fundamentals of Personal Rapid Transit; Boston University: New York, NY, USA, 1993. [Google Scholar]
- Irving, J.H. (Ed.) Fundamentals of Personal Rapid Transit; Lexington Books-D.C. Heath and Company: Lexington, MA, USA, 1978. [Google Scholar]
- Mineta Transportation Institute. Automated Transit Networks: A Review on the State of the Industry and Prospects for the Future; Mineta Transportation Institute: San José, CA, USA, 2014. [Google Scholar]
- Schweizer, J.; Parriani, T.; Traversi, E.; Rupi, F. Optimum Vehicle Flows in a Fully Automated Vehicle Network. In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems, Rome, Italy, 23–24 April 2016; SCITEPRESS—Science and and Technology Publications: Setúbal, Portugal, 2016; pp. 195–202. [Google Scholar] [CrossRef]
- Kerr, A.D.; James, P.A.; Craig, A.P. Infrastructure Cost Comparisons for PRT and APM: Automated People Movers 2005—Moving to Mainstream. In Proceedings of the 10th International Conference on Automated People Movers, Orlando, FL, USA, 1–4 May 2005; American Society of Civil Engineers: Orlando, FL, USA, 2005. [Google Scholar] [CrossRef]
- Fichter, D. Individualized Automatic Transit and the City; B.H. Sikes: Providence, RI, USA, 1964. [Google Scholar]
- Latour, B. Aramis, or, the Love of Technology; Harvard University Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Burke, C.G. Innovation and Public Policy: The Case of Personal Rapid Transit; Lexington Books Heath: Lexington, MA, USA, 1979. [Google Scholar]
- Castangia, M.; Guala, L. Modelling and simulation of a PRT network. In Urban Transport XVII; Pratelli, A., Brebbia, C.A., Eds.; WIT Transactions on The Built Environment; WIT Press: Southampton, UK, 2011; pp. 459–472. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.S.; Li, H.; Andreasson, I.; van Zuylen, H. Optimizing the fleet size of a Personal Rapid Transit system: A case study in port of Rotterdam. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 301–305. [Google Scholar] [CrossRef]
- AMG—Advanced Mobility Group. East Contra Costa County Dynamic Personal Micro Transit Feasibility Study Report; Advanced Mobility Group: Walnut Creek, CA, USA, 2021. [Google Scholar]
- Muller, P.J.; Andreasson, I.J. A Light Rail, Group Rapid Transit, Personal Rapid Transit Comparison. In Automated People Movers and Automated Transit Systems 2018; Sproule, W.J., Ed.; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 1–11. [Google Scholar] [CrossRef]
- Meyer, A.M.; Morache, R. Feasibility of Personal Rapid Transit In Ithaca, New York: Final Report; New York State Energy Research and Development Authority: Albany, NY, USA, 2010. [Google Scholar]
- Carnegie, J.A.; Voorhees, A.M. Viability of Personal Rapid Transit In New Jersey: Final Report; New Jersey Department of Transportation: Trenton, NJ, USA, 2007.
- Sarkar, P.K.; Jain, U. Benchmarking of Personal Rapid Transit System (Dynamic Model). Transp. Res. Procedia 2017, 25, 4207–4218. [Google Scholar] [CrossRef]
- Singh, S.K.; Gupta, T. Critical Analysis and Feasibility of PRT for Gurgaon City. Int. J. Sci. Res. Sci. Eng. Technol. 2021, 8, 83–86. [Google Scholar] [CrossRef]
- Arslan, O.; Reichert, M.; Sellaouti, A.; Hoffmann, S. Investigation of Personal Rapid Transit Station Capacities using Microscopic Traffic Simulation. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Schweizer, J.; Mantecchini, L.; Greenwood, J. Analytical Capacity Limits of Personal Rapid Transit Stations. In Automated People Movers and Transit Systems 2011; Leder, W.H., Sproule, W.J., Eds.; American Society of Civil Engineers: Reston, VA, USA, 2011; pp. 326–338. [Google Scholar] [CrossRef]
- Lowson, M.; Hammersley, J. Maximization of PRT Station Capacity. In Transportation Research Board Paper; Transportation Research Board: Washington, DC, USA, 2011. [Google Scholar]
- Grabski, W.; Daszczuk, W.B. Priority Rules on ATN (PRT) Intersections. Autobusy-TEST 2017, 18, 1503–1506. [Google Scholar]
- Hoang, T.; Nguyen, T.H.V.; Shiao, Y. Simulation of intelligent merging control for Personal Rapid Transit. In Seventh International Conference on Information Science and Technology; IEEE: Piscataway, NJ, USA, 2017; pp. 340–344. [Google Scholar] [CrossRef]
- Schweizer, J.; Danesi, A.; Rupi, F.; Traversi, E. Comparison of static vehicle flow assignment methods and microsimulations for a personal rapid transit network. J. Adv. Transp. 2012, 46, 340–350. [Google Scholar] [CrossRef]
- Daszczuk, W.B.; Mieścicki, J.; Grabski, W. Distributed algorithm for empty vehicles management in personal rapid transit (PRT) network. J. Adv. Transp. 2016, 50, 608–629. [Google Scholar] [CrossRef]
- Kozłowski, M.; Choromański, W.; Kowara, J. Arametric sensitivity analysis of ATN-PRT vehicle (automated transit network—Personal rapid transit). J. Vibroeng. 2015, 17, 1436–1451. [Google Scholar]
- Kozłowski, M. Analysis of dynamics of a scaled PRT (personal rapid transit) vehicle. J. Vibroeng. 2019, 21, 1426–1440. [Google Scholar] [CrossRef]
- Choromanski, W.; Kowara, J. PRT-Modeling and Dynamic Simulation of Track and Vehicle. In Automated People Movers and Transit Systems 2011; Leder, W.H., Sproule, W.J., Eds.; American Society of Civil Engineers: Reston, VA, USA, 2011; pp. 294–306. [Google Scholar] [CrossRef]
- Hollar, S.; Brain, M.; Nayak, A.A.; Stevens, A.; Patil, N.; Mittal, H.; Smith, W.J. A new low cost, efficient, self-driving personal rapid transit system. In Proceedings of the 28th IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 412–417. [Google Scholar] [CrossRef]
- Mittelman, G.; Kariv, Y.; Cohen, Y.; Avineri, E. Techno-economic analysis of energy supply to personal rapid transit (PRT) systems. Appl. Energy 2022, 306, 118006. [Google Scholar] [CrossRef]
- Liu, R. (Ed.) Automated Transit: Planning, Operation, and Applications; IEEE Press Series on Systems Science and Engineering; IEEE Press Wiley: Hoboken, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Tahmasseby, S.; Kattan, L. Preliminary economic appraisal of personal rapid transit (PRT) and urban gondola feeder systems serving a university campus and its surrounding major attractions. Can. J. Civ. Eng. 2015, 42, 67–79. [Google Scholar] [CrossRef]
- Mascia, M.; Hu, S.; Han, K.; Sun, A.; North, R.; Lees-Miller, J.D. A holistic approach for performance assessment of personal rapid transit. Res. Transp. Bus. Manag. 2016, 18, 70–76. [Google Scholar] [CrossRef]
- Mieścicki, J.; Daszczuk, W.B. Proposed benchmarks for PRT networks simulation. Arch. Transp. 2017, 27–28, 123–133. [Google Scholar] [CrossRef]
- Mueller, K.; Sgouridis, S.P. Simulation-based analysis of personal rapid transit systems: Service and energy performance assessment of the Masdar City PRT case. J. Adv. Transp. 2011, 45, 252–270. [Google Scholar] [CrossRef]
- el Ayashe, M.; Jawad, D.; Rouhana, F.; Aouad, C. Sensitivity Analysis of Personal Rapid Transit Parameters in Urban Setting: Case Study: Beirut Central District. In Proceedings of the 2019 Fourth International Conference on Advances in Computational Tools for Engineering Applications (ACTEA), Beirut, Lebanon, 3–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- German Aerospace Center. SUMO Scenarios: Bad Hersfeld. 2022. Available online: https://github.com/DLR-TS/sumo-scenarios/tree/main/BadHersfeld (accessed on 5 September 2022).
- Felix Gotzler. Bad Hersfeld PRT Extension. 2022. Available online: https://github.com/TUMFTM/sumo-prt (accessed on 5 September 2022).
- Meier-Maaz, N. Im E-Mobil zum Klinikum? Autonome Fahrzeuge sollen nach Erweiterung Stau verhindern. Hessische Niedersächsische Allgemeine 2022. Available online: https://www.hna.de/lokales/rotenburg-bebra/bad-hersfeld-ort56532/individuell-unterwegs-zum-klinikum-91430875.html#:~:text=Autonome%20Fahrzeuge%20sollen%20nach%20Erweiterung%20Stau%20verhindern,-Erstellt%3A%2024.03.2022&text=Nach%20der%20geplanten%20Erweiterung%20des,jedenfalls%20tr%C3%A4umt%20B%C3%BCrgermeister%20Thomas%20Fehling (accessed on 5 September 2022).
- Codecà, L.; Erdmann, J.; Cahill, V.; Härri, J. SAGA: An Activity-based Multi-modal Mobility Scenario Generator for SUMO; German Aerospace Center: Berlin, Germany, 2020. [Google Scholar]
- Zheng, H.; Peeta, S. Network design for personal rapid transit under transit-oriented development. Transp. Res. Part C Emerg. Technol. 2015, 55, 351–362. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Eclipse Foundation. Simulation of Urban MObility. Available online: https://www.eclipse.org/sumo/ (accessed on 5 September 2022).
- American Society of Civil Engineers. Automated People Mover Standards; American Society of Civil Engineers: Reston, VA, USA, 2021. [Google Scholar]
- SUMO Documentation: Taxi Device. Available online: https://sumo.dlr.de/docs/Simulation/Taxi.html (accessed on 5 September 2022).
- Antje, V.; Martin, D. 21st Century Transport for Smart Cities: High Density Urban Passenger & Freight Transport at Half the Cost/Space/Time and Highest Passenger Convenience; Autonomous Network Transit: München, Germany, 2022. [Google Scholar]
- UrbanLoop. La Mobilité Urbaine, Fluide, économoique et Durable. Available online: https://urbanloop.univ-lorraine.fr/ (accessed on 5 September 2022).
- Glydways Inc. MAss Transit Ride Hailing: A Revolution in Better Mobility and Public Transportation; Glydways Inc.: San Francisco, CA, USA, 2022. [Google Scholar]
- Stefan, K. Microscopic Modeling of Traffic Flow: Investigation of Collision Free Vehicle Dynamics; Deutsches Zentrum für Luft- und Raumfahrt: Cologne, Germany, 1998. [Google Scholar]
- Bjärkvik, E.; Fürer, F.; Barthauer, M.; Friedrich, B.; Pourabdollah, M.; Lindenberg, B.; Rieken, J.; Rummel, J.; Flötteröd, Y.P.; Erdmann, J.; et al. SUMO 2017 towards Simulation for Autonomous Mobility; German Aerospace Center: Berlin, Germany, 2017. [Google Scholar]
- German Aerospace Center. Introduction to TraCI; German Aerospace Center: Berlin, Germany, 2022. [Google Scholar]
- Daszczuk, W.B. Measures of Structure and Operation of Automated Transit Networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2966–2979. [Google Scholar] [CrossRef]
- Chebbi, O.; Chaouachi, J. An elitist multi-objective genetic algorithm for minimizing vehicle numbers and energy consumption in the context of Personal Rapid Transit. In Proceedings of the 2014 International Conference on Advanced Logistics and Transport (ICALT), Hammamet, Tunisia, 1–3 May 2014; pp. 270–274. [Google Scholar] [CrossRef]
- Rezgui, D.; Chaouachi-Siala, J.; Aggoune-Mtalaa, W.; Bouziri, H. Application of a memetic algorithm to the fleet size and mix vehicle routing problem with electric modular vehicles. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Berlin Germany, 15–19 July 2017; ACM: New York, NY, USA, 2017; pp. 301–302. [Google Scholar] [CrossRef]
- Chebbi, O.; Chaouachi, J. Simulated Annealing Approach for Solving the Fleet Sizing Problem in On-Demand Transit System. In Proceedings of the Second International Afro-European Conference for Industrial Advancement AECIA 2015, Villejuif, France, 9–11 September 2015; Abraham, A., Wegrzyn-Wolska, K., Hassanien, A.E., Snasel, V., Alimi, A.M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 427, pp. 217–226. [Google Scholar] [CrossRef]
- Hörl, S.; Ruch, C.; Becker, F.; Frazzoli, E.; Axhausen, K.W. Fleet operational policies for automated mobility: A simulation assessment for Zurich. Transp. Res. Part C: Emerg. Technol. 2019, 102, 20–31. [Google Scholar] [CrossRef]
- Bischoff, J.; Maciejewski, M. Simulation of City-wide Replacement of Private Cars with Autonomous Taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef]
- Maciejewski, M.; Bischoff, J. Large-scale Microscopic Simulation of Taxi Services. Procedia Comput. Sci. 2015, 52, 358–364. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Rossi, F.; Pavone, M. Model Predictive Control of Autonomous Mobility-on-Demand Systems. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1382–1389. [Google Scholar] [CrossRef]
- Frank, L.; Bradley, M.; Kavage, S.; Chapman, J.; Lawton, T.K. Urban form, travel time, and cost relationships with tour complexity and mode choice. Transportation 2007, 35, 37–54. [Google Scholar] [CrossRef]
- Cervero, R. Built environments and mode choice: Toward a normative framework. Transp. Res. Part D Transp. Environ. 2002, 7, 265–284. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Hospital | Schildepark | Parking North | |
|---|---|---|---|---|
| Station | 0 | 506 | 0 | 0 |
| Hospital | 506 | 0 | 458 | 50 |
| Schildepark | 0 | 458 | 0 | 0 |
| Parking North | 0 | 50 | 0 | 0 |
| Parameter | Value |
|---|---|
| Vehicle width | 1 |
| Vehicle length | |
| Car-following model | Krauss [47] |
| Maximum speed | s−1 |
| Acceleration | s−2 |
| Deceleration | s−2 |
| Emergency deceleration | s−2 |
| Minimal inter-vehicle gap | 1 |
| Tau | 1 |
| Sigma | 0 |
| Vehicle mass | 500 |
| Parameter | Values |
|---|---|
| Fleetsize | 15 to 49, increment: 1 |
| Number of berths | 1 to 5, increment 1 |
| Dispatching strategy | NIT, NOR |
| Rebalancing strategy | RI, GTD, PC+RI, PC+GTD |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gotzler, F.; Neumann, F.; Adenaw, L. Assessment of Personal Rapid Transit System Configurations Regarding Efficiency and Service Quality. Future Transp. 2022, 2, 734-752. https://doi.org/10.3390/futuretransp2030041
Gotzler F, Neumann F, Adenaw L. Assessment of Personal Rapid Transit System Configurations Regarding Efficiency and Service Quality. Future Transportation. 2022; 2(3):734-752. https://doi.org/10.3390/futuretransp2030041
Chicago/Turabian StyleGotzler, Felix, Franziska Neumann, and Lennart Adenaw. 2022. "Assessment of Personal Rapid Transit System Configurations Regarding Efficiency and Service Quality" Future Transportation 2, no. 3: 734-752. https://doi.org/10.3390/futuretransp2030041
APA StyleGotzler, F., Neumann, F., & Adenaw, L. (2022). Assessment of Personal Rapid Transit System Configurations Regarding Efficiency and Service Quality. Future Transportation, 2(3), 734-752. https://doi.org/10.3390/futuretransp2030041