
Traffic Flow Funnels Based on Aircraft Performance for Optimized Departure Procedures




Abstract
:1. Introduction
1.1. Towards 3D Trajectory Optimization
1.2. Sources of Trajectory Uncertainty during Climb
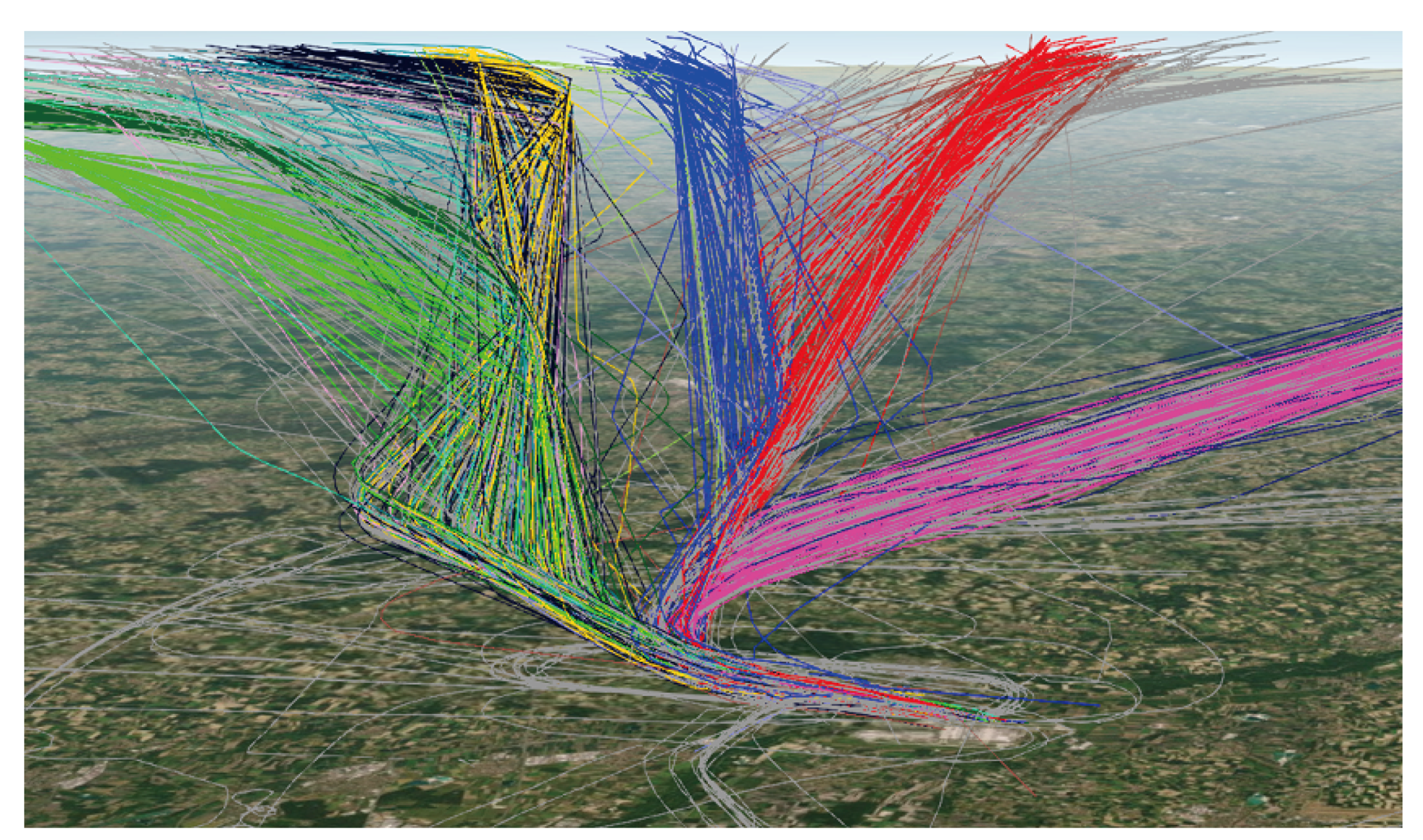
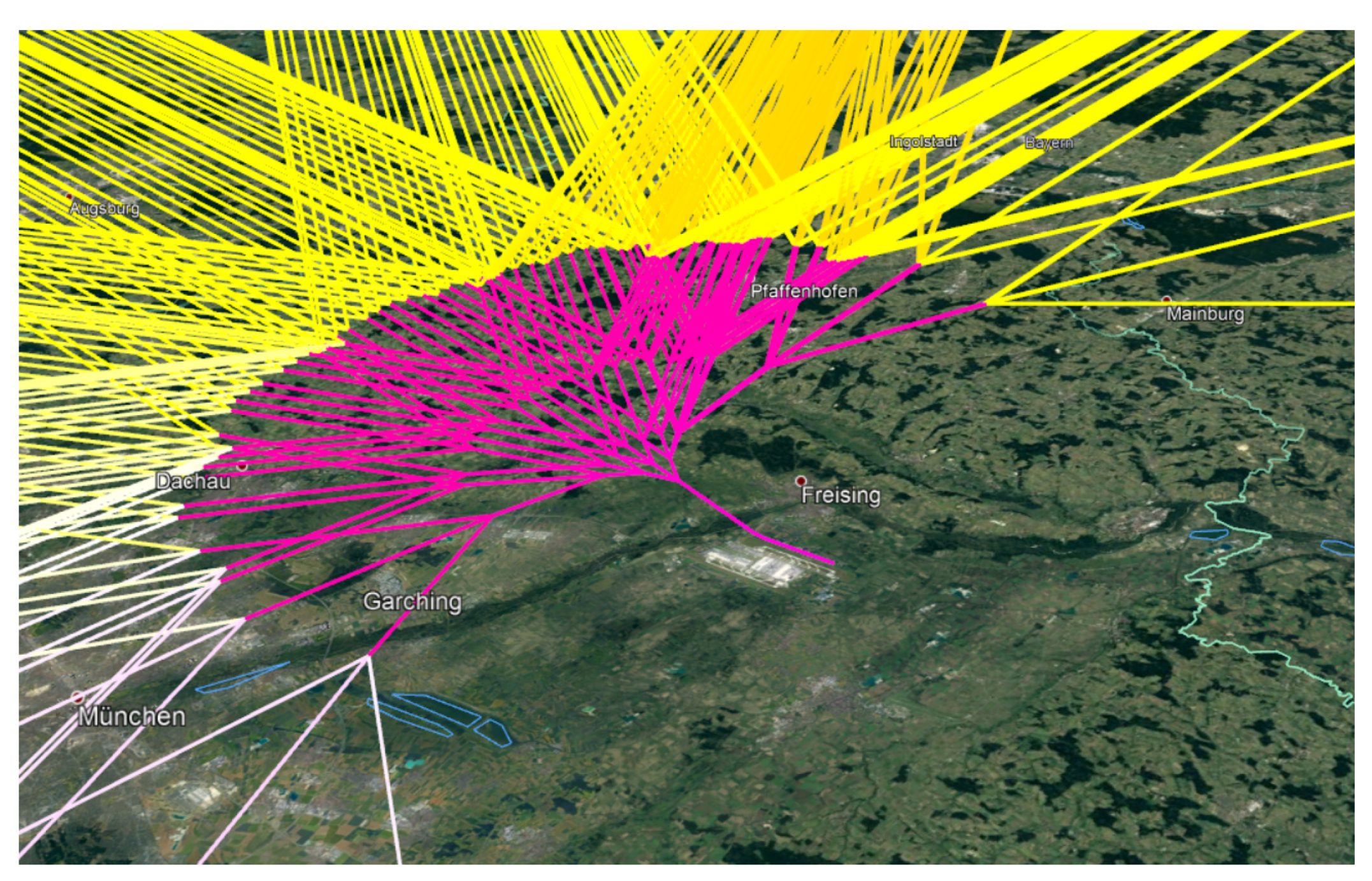
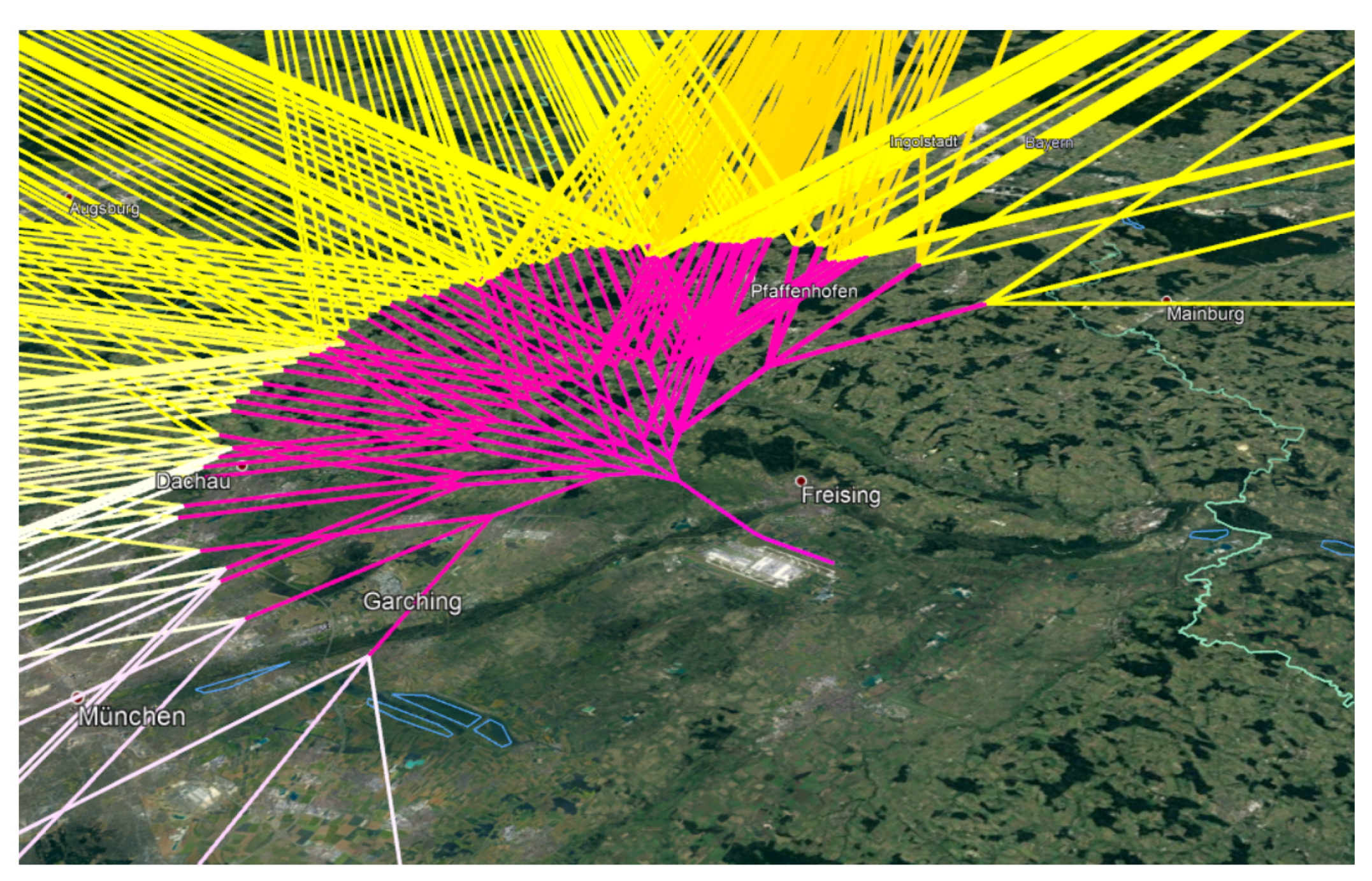
1.3. Trajectory Clustering and Traffic Flow Funnels
1.4. Optimization Inside Traffic Flow Funnels
2. Materials and Methods
2.1. Concept of Performance-Optimized Departure Funnels
- Historical departure flights from ADS-B data are clustered to various funnels incorporating the actual procedures as a reference scenario to identify benefits of the funnel concept (ADS-B funnel);
- These ADS-B flights are optimized without any route restriction considering wind, fuel, and direct operating costs with the multi-criteria optimization of TOMATO in a newly developed 3D search grid for departures. This ensures that most aircraft reach their optimal trajectory in the presence of uncertainty sources, such as the individual flight performance of various aircraft types, masses, and weather forecasts;
- These optimized trajectories are clustered to the optimized funnels with the same clustering algorithm;
- The ADS-B and optimized funnels are simulated with the same historical flight schedule, where the flights are restricted to fly inside the given funnels and optimized according to the weather data valid for this period. For this, the so-called 3D funnel grid is developed, which determines the most suitable funnel per flight and then limits pathfinding to the portion of airspace inside the funnel;
- The flight efficiency of the two funnel sets is compared to quantify the efficiency gain of the optimized funnels.
2.2. Trajectory Optimization
2.2.1. Tabulated Aircraft Performance for Pathfinding Algorithms
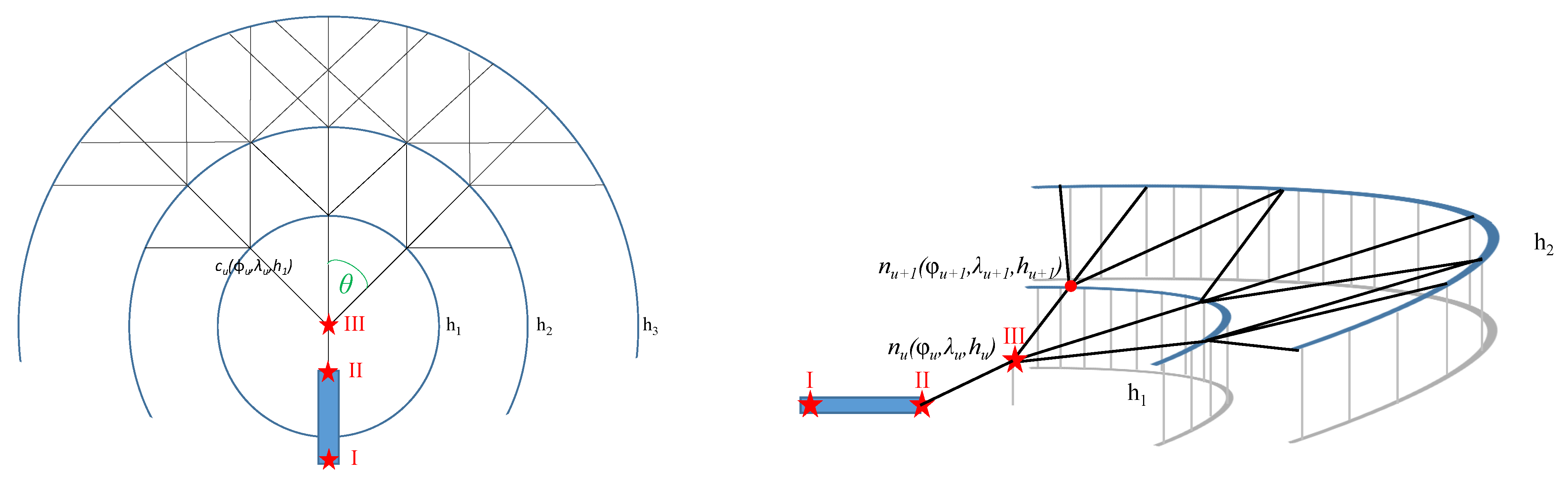
2.2.2. Multi-Objective 3D Pathfinding for Departures
- The next node is placed in the direction of at the next altitude from to account for a straight climb without track change. For this, Equation (10) is used to determine the climb duration from to to then calculate the longitudinal climb distance with Equation (13).
- Further nodes are added at using , but permitting left and right turns in angular steps of up to the maximum angular difference to avoid an ROT that exceeds .
- To permit level segments, additional nodes are inserted at with turns permitted at a steps of up to . Furthermore, projected on the ground is used to ensure that these nodes are located perpendicularly below the previously inserted nodes.
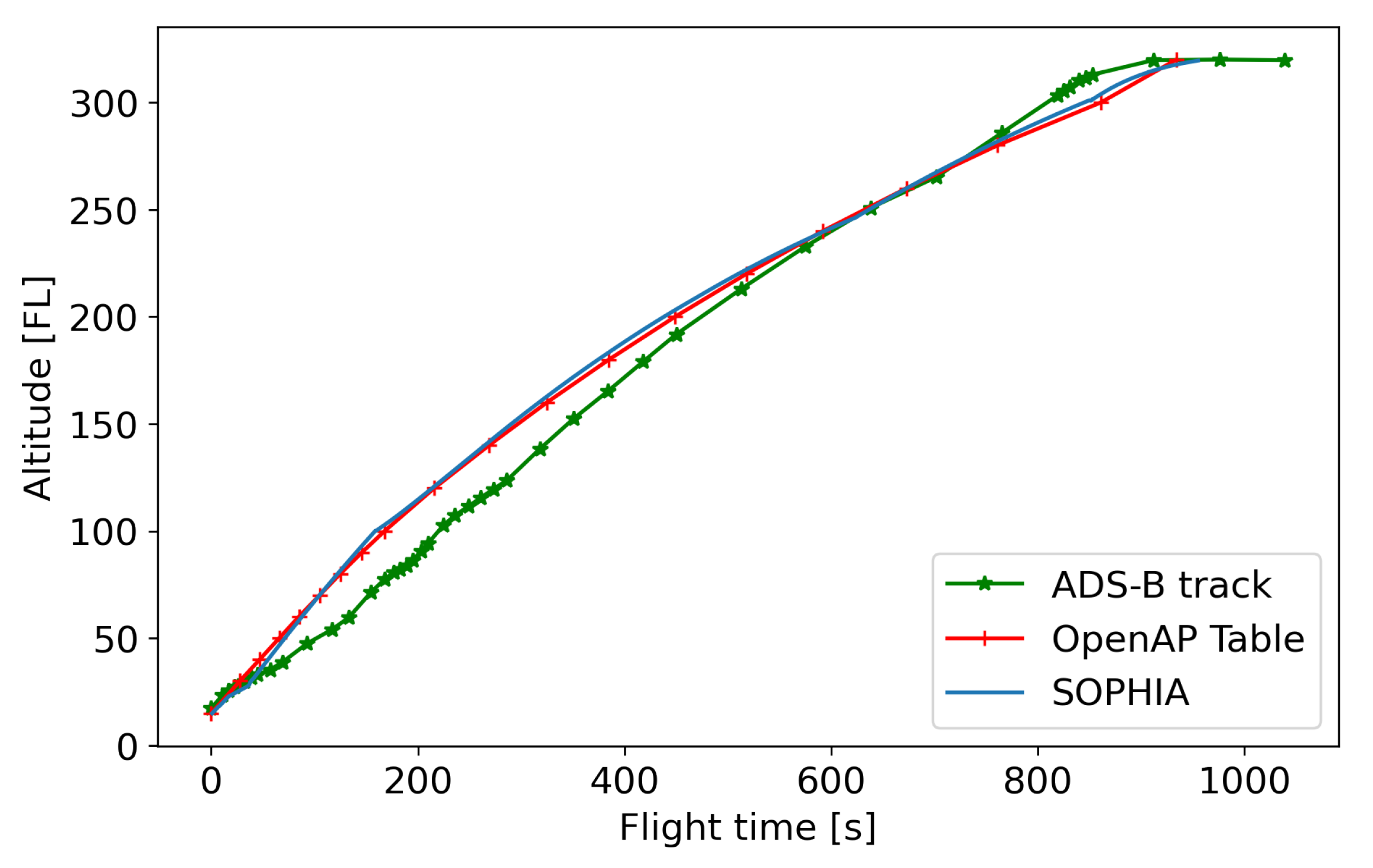
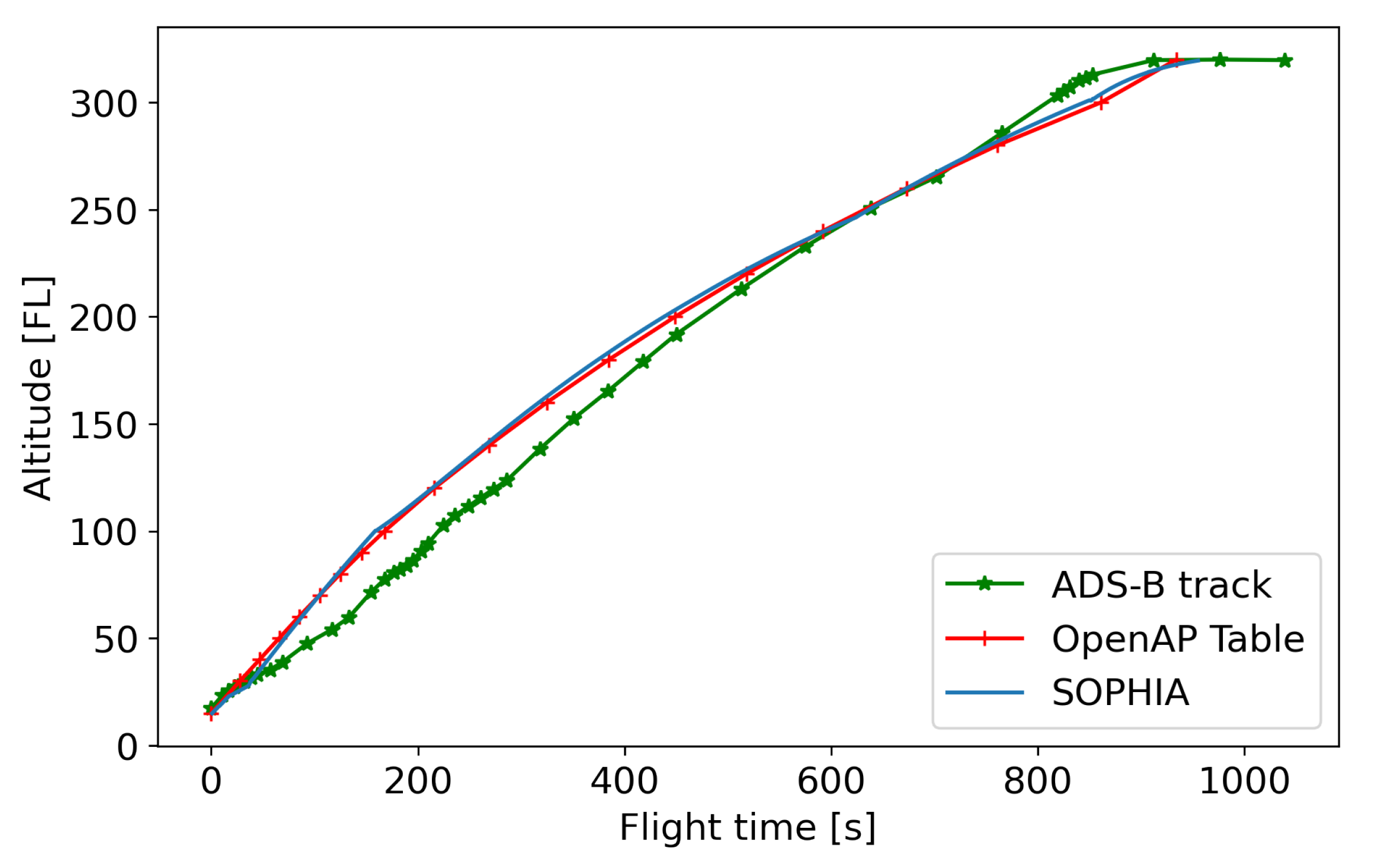
2.2.3. Vertical Profile with Sophisticated Aircraft Performance Model (SOPHIA)
2.3. Algorithm for the Traffic Flow Funnels
- With the inner clustering, the trajectories are assigned to a runway threshold;
- The outer clustering determines a common end area on the E-TMA radius;
- The preliminary clustering groups all trajectories with the same runway threshold and end area;
- The sub-clustering separates groups of trajectories, which have the same runway threshold and end area, but do not follow a similar route in between;
- For each of these clusters, a mean trajectory is computed; and
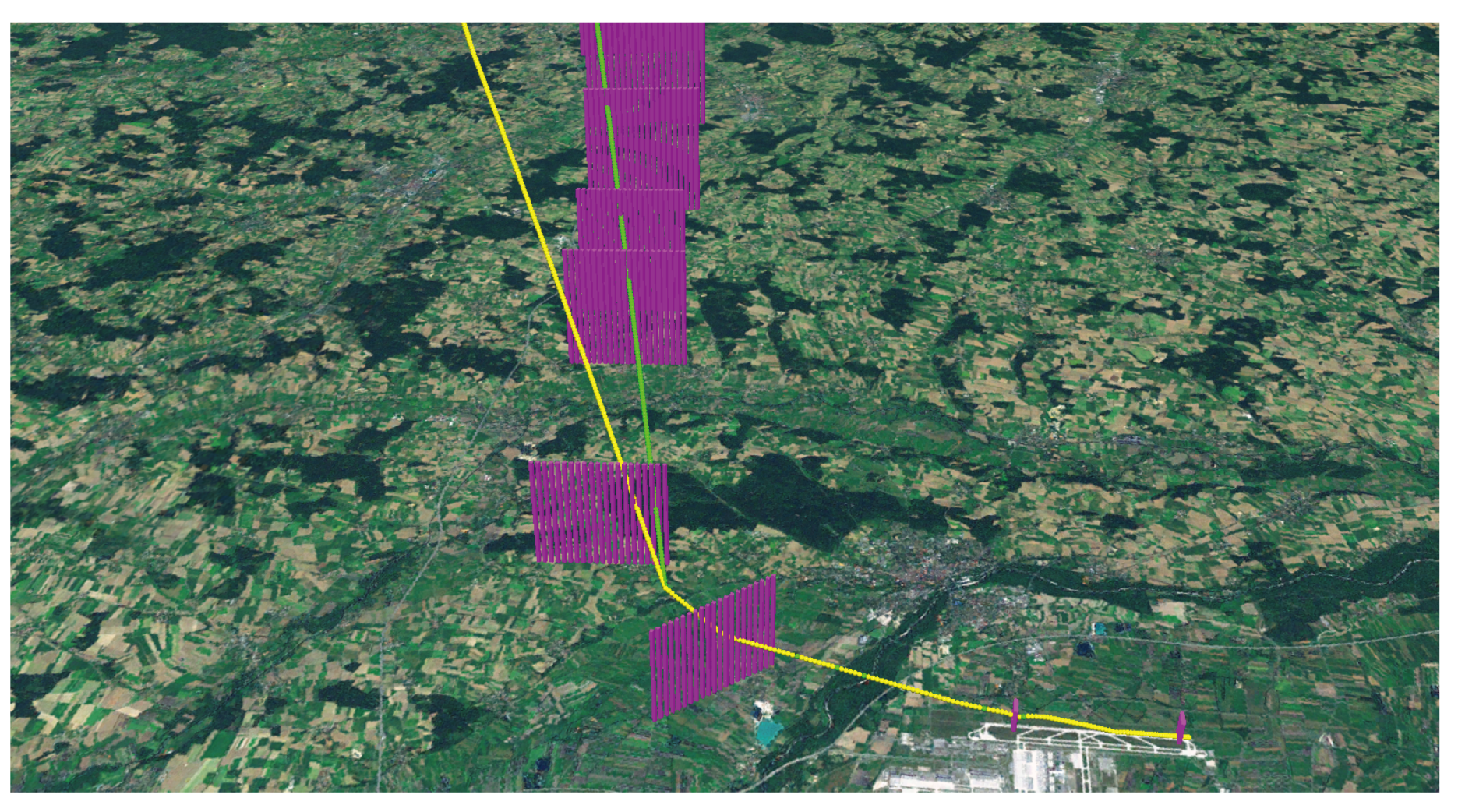
- Finally, gates are placed along the mean trajectory to define the lateral and vertical extent of the funnel.
2.4. Allocation and 3D Pathfinding Inside the Traffic Flow Funnels
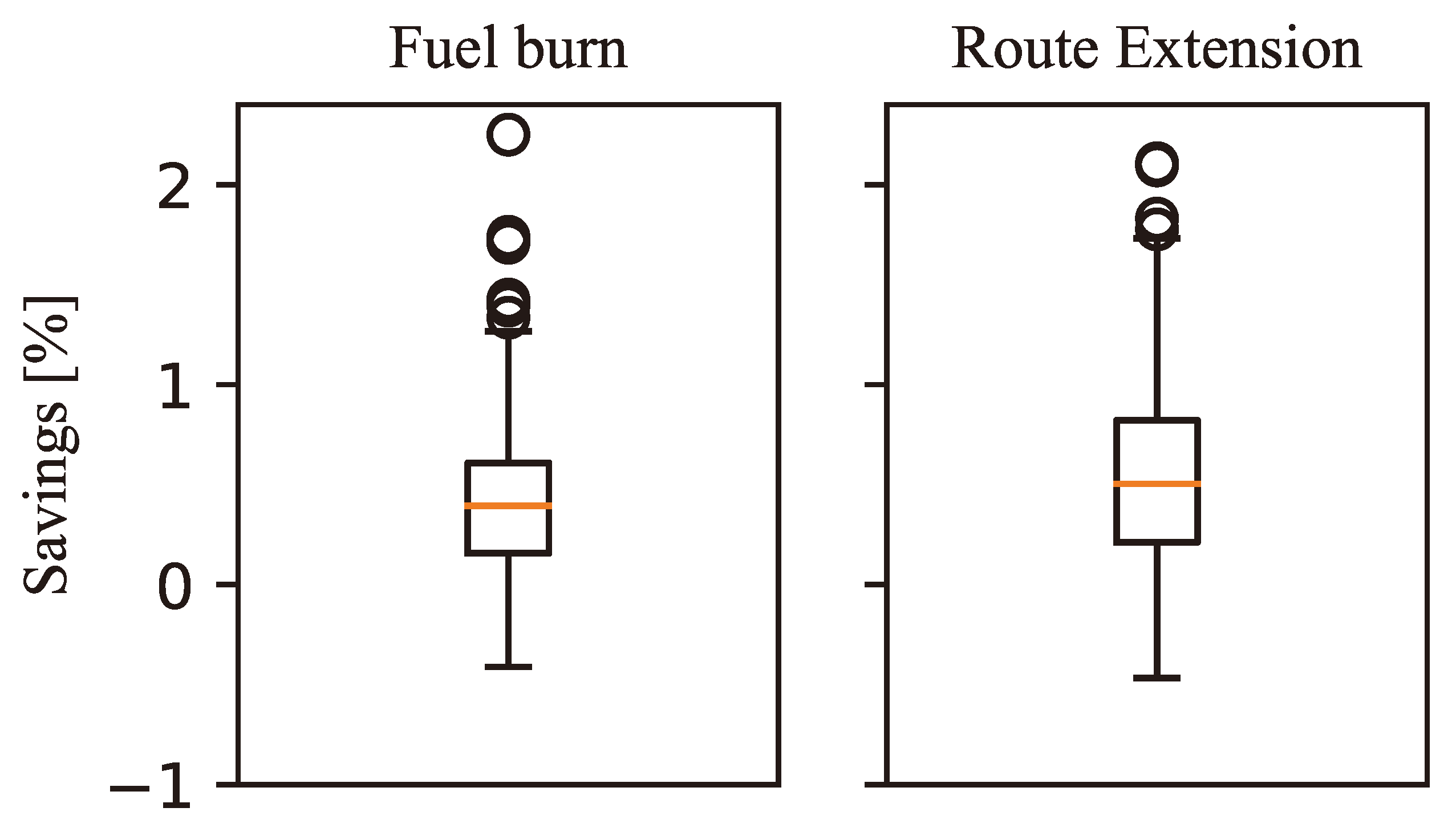
2.5. Evaluation Metrics
3. Results
3.1. Scenario Definition
3.2. Weather Effect on Optimized Trajectories and Height of Funnel Gates
3.3. Funnels of ADS-B and Optimized Clustered Flights
3.4. Flight Efficiency
4. Discussion
4.1. Key Findings
4.2. Assumptions and Simplifications
4.3. Operational Applicability
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Civil Aviation Organization. Continuous Climb Operations (CCO) Manual Doc 9993 AN/495; Technical Report; International Civil Aviation Organization: Montreal, QC, Canada, 2013. [Google Scholar]
- Förster, S.; Rosenow, J.; Lindner, M.; Fricke, H. A Toolchain for Optimizing Trajectories Under Real Weather Conditions and Realistic Flight Performance. In Proceedings of the Greener Aviation Conference, Brussels, Belgium, 11–13 October 2016. [Google Scholar]
- Lindner, M.; Zeh, T.; Braßel, H.; Fricke, H. Aircraft performance-optimized departure flights using traffic flow funnels. In Proceedings of the 14th USA/Europe Air Traffic Management Research and Development Seminar (ATM2021), New Orleans, LA, USA, 20–24 September 2021. [Google Scholar]
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. OpenAP: An Open-Source Aircraft Performance Model for Air Transportation Studies and Simulations. Aerospace 2020, 7, 104. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; AAAI Press: Palo Alto, CA, USA, 1996; Volume KDD’96, pp. 226–231. [Google Scholar]
- Rosenow, J.; Förster, S.; Lindner, M.; Fricke, H. Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility. J. Air Transp. 2019, 27, 8–15. [Google Scholar] [CrossRef]
- Hartjes, S.; Hendriks, T.; Visser, D. Contrail Mitigation Through 3D Aircraft Trajectory Optimization. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; AIAA AVIATION Forum, American Institute of Aeronautics and Astronautics: Reston, VI, USA, 2016. [Google Scholar] [CrossRef]
- Sun, J. Open Aircraft Performance Modeling: Based on an Analysis of Aircraft Surveillance Data. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Félix Patrón, R.; Botez, R. Flight Trajectory Optimization Through Genetic Algorithms for LNAV and VNAV Integrated Paths. J. Aerosp. Inf. Syst. 2015, 12, 533–544. [Google Scholar] [CrossRef]
- Franco, A.; Rivas, D.; Valenzuela, A. Optimal Aircraft Path Planning in a Structured Airspace Using Ensemble Weather Forecasts. In Proceedings of the 8th SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Murrieta-Mendoza, A.; Romain, C.; Botez, R.M. 3D Cruise Trajectory Optimization Inspired by a Shortest Path Algorithm. Aerospace 2020, 7, 99. [Google Scholar] [CrossRef]
- Rosenow, J.; Förster, S.; Fricke, H. Continuous Climb Operations with Minimum Fuel Burn. In Proceedings of the SESAR Innovation Days, Delft, The Netherlands, 8–10 November 2016. [Google Scholar]
- Liang, M. Aircraft Route Network Optimization in Terminal Maneuvering Area. Ph.D. Thesis, Université de Toulouse, Toulouse, France, 2018. [Google Scholar]
- Tian, Y.; Wan, L.; Han, K.; Ye, B. Optimization of Terminal Airspace Operation with Environmental Considerations. Transp. Res. Part Transp. Environ. 2018, 63, 872–889. [Google Scholar] [CrossRef]
- Mondoloni, S. Aircraft Trajectory Prediction Errors: Including a Summary of Error Sources and Data. FAA/Eurocontrol Action Plan 2006, 16, 2. [Google Scholar]
- Zeh, T.; Rosenow, J.; Fricke, H. Interdependent Uncertainty Handling in Trajectory Prediction. Aerospace 2019, 6, 15. [Google Scholar] [CrossRef] [Green Version]
- Alligier, R. Predictive Distribution of the Mass and Speed Profile to Improve Aircraft Climb Prediction. In Proceedings of the 13th USA/Europe Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 17–21 June 2019. [Google Scholar]
- Zeh, T.; Rosenow, J.; Alligier, R.; Fricke, H. Prediction of the Propagation of Trajectory Uncertainty for Climbing Aircraft. In Proceedings of the 39th AIAA/IEEE Digital Avionics Systems Conference, San Antonio, TX, USA, 11–15 October 2020. [Google Scholar]
- Sun, J.; Blom, H.A.; Ellerbroek, J.; Hoekstra, J.M. Aircraft Mass and Thrust Estimation Using Recursive Bayesian Method. In Proceedings of the 8th International Conference on Research in Air Transportation (ICRAT2018), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Zheng, Q.; Zhao, Y. Modeling Wind Uncertainties for Stochastic Trajectory Synthesis. In Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Virginia Beach, VA, USA, 21–22 September 2011; American Institute of Aeronautics and Astronautics: Virginia Beach, VA, USA, 2011. [Google Scholar] [CrossRef]
- Cheung, J.; Hally, A.; Heijstek, J.; Marsman, A.; Brenguier, J.L. Recommendations on Trajectory Selection in Flight Planning Based on Weather Uncertainty. In Proceedings of the Fifth SESAR Innovation Days, Bologna, Italy, 1–3 December 2015. [Google Scholar]
- Wan, J.; Zhang, H.; Liu, F.; Lv, W.; Zhao, Y. Optimization of Aircraft Climb Trajectory considering Environmental Impact under RTA Constraints. J. Adv. Transp. 2020, 2020, 2738517. [Google Scholar] [CrossRef]
- Lloyd, S. Least Squares Quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef] [Green Version]
- MacQueen, J. Some methods for classification and analysis of multivariate observations. Berkeley Symp. Math. Stat. Probab. 1967, 5, 281–297. [Google Scholar]
- Rosenow, J.; Chen, G.; Fricke, H.; Sun, X.; Wang, Y. Impact of Chinese and European Airspace Constraints on Trajectory Optimization. Aerospace 2021, 8, 338. [Google Scholar] [CrossRef]
- Wang, Z.; Liang, A.; Delahaye, D. Short-Term 4D Trajectory Prediction Using Machine Learning Methods. In Proceedings of the 7th SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]
- Olive, X.; Morio, J. Trajectory Clustering of Air Traffic Flows around Airports. Aerosp. Sci. Technol. 2019, 84, 776–781. [Google Scholar] [CrossRef] [Green Version]
- Schultz, M.; Rosenow, J.; Olive, X. Data-driven airport management enabled by operational milestones derived from ADS-B messages. J. Air Transp. Manag. 2022, 99, 102164. [Google Scholar] [CrossRef]
- Gariel, M.; Srivastava, A.N.; Feron, E. Trajectory Clustering and an Application to Airspace Monitoring. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1511–1524. [Google Scholar] [CrossRef] [Green Version]
- Basora, L.; Morio, J.; Mailhot, C. A Trajectory Clustering Framework to Analyse Air Traffic Flows. In Proceedings of the 7th SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]
- Corrado, S.J.; Puranik, T.G.; Pinon, O.J.; Mavris, D.N. Trajectory Clustering within the Terminal Airspace Utilizing a Weighted Distance Function. Proceedings 2020, 59, 7. [Google Scholar] [CrossRef]
- Olive, X.; Basora, L.; Viry, B.; Alligier, R. Deep Trajectory Clustering with Autoencoders. In Proceedings of the International Conference for Research in Air Transportation (ICRAT 2020), Tampa, FL, USA, 23–26 June 2020. [Google Scholar]
- Salaün, E.; Gariel, M.; Vela, A.E.; Feron, E. Aircraft Proximity Maps Based on Data-Driven Flow Modeling. J. Guid. Control Dyn. 2012, 35, 563–577. [Google Scholar] [CrossRef] [Green Version]
- Eerland, W.J.; Box, S.; Sóbester, A. Modeling the Dispersion of Aircraft Trajectories Using Gaussian Processes. J. Guid. Control Dyn. 2016, 39, 2661–2672. [Google Scholar] [CrossRef]
- Murça, M.; Delaura, R.; Hansman, R.; Jordan, R.; Reynolds, T.; Balakrishnan, H. Trajectory Clustering and Classification for Characterization of Air Traffic Flows. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Joint Planning and Development Office, Next Generation Air Transportation System. Concept of Operations for the Next Generation Air Transportation System, Version 3.2; Technical Report; Joint Planning and Development Office, Next Generation Air Transportation System (NextGen): Washington, DC, USA, 2011.
- Lindner, M.; Rosenow, J.; Zeh, T.; Fricke, H. In-Flight Aircraft Trajectory Optimization within Corridors Defined by Ensemble Weather Forecasts. Aerospace 2020, 7, 144. [Google Scholar] [CrossRef]
- Lindner, M.; Zeh, T.; Fricke, H. Reoptimizaton of 4D-Flight Trajectories During Flight Considering Forecast Uncertainties. In Proceedings of the Deutscher Luft-Und Raumfahrtkongress (DLRK), Friedrichshafen, Germany, 4–6 September 2018. [Google Scholar]
- International Civil Aviation Organization. Continuous Descent Operations (CDO) Manual; Technical Report Doc 9931 AN/476, Montreal; International Civil Aviation Organization: Montreal, QC, Canada, 2010. [Google Scholar]
- Takeichi, N.; Abumi, Y. Benefit optimization and operational requirement of Flow Corridor in Japanese airspace. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2015, 230, 1780–1787. [Google Scholar] [CrossRef]
- Errico, A.; Vito, V.D. Aircraft operating technique for efficient sequencing arrival enabling environmental benefits through CDO in TMA. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Sáez, R.; Prats, X.; Polishchuk, T.; Polishchuk, V.; Schmidt, C. Automation for Separation with Continuous Descent Operations: Dynamic Aircraft Arrival Routes. J. Air Transp. 2020, 28, 144–154. [Google Scholar] [CrossRef]
- Zhou, J.; Cafieri, S.; Delahaye, D.; Sbihi, M. Optimization-Based Design of Departure and Arrival Routes in Terminal Maneuvering Area. J. Guid. Control Dyn. 2017, 40, 2889–2904. [Google Scholar] [CrossRef]
- Ho-Huu, V.; Hartjes, S.; Visser, H.; Curran, R. An optimization framework for route design and allocation of aircraft to multiple departure routes. Transp. Res. Part Transp. Environ. 2019, 76, 273–288. [Google Scholar] [CrossRef] [Green Version]
- Chevalier, J.; Delahaye, D.; Sbihi, M.; Marechal, P. Departure and Arrival Routes Optimization Near Large Airports. Aerospace 2019, 6, 80. [Google Scholar] [CrossRef] [Green Version]
- Rosenow, J.; Chen, G.; Fricke, H.; Wang, Y. Factors impacting Chinese and European Vertical Fight Efficiency. Submitt. Aerosp. 2022, 9, 76. [Google Scholar] [CrossRef]
- Sun, J.; Ellerbroek, J.; Hoekstra, J.M. WRAP: An Open-Source Kinematic Aircraft Performance Model. Transp. Res. Part Emerg. Technol. 2019, 98, 118–138. [Google Scholar] [CrossRef]
- Blake, W. Performance Training Group. Jet Transport Performance Methods; Boeing Commercial Airplanes: Seattle, WA, USA, 2009. [Google Scholar]
- Vincenty, T. Direct and Inverse solutions of geodesics on the ellipsoid with application of nested equations. Surv. Rev. 1975, 23, 88–93. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Akima, H. A New Method of Interpolation and Smooth Curve Fitting Based on Local Procedures. J. ACM 1970, 17, 589–602. [Google Scholar] [CrossRef]
- Akima, H. A Method of Bivariate Interpolation and Smooth Surface Fitting Based on Local Procedures. Commun. ACM 1974, 17, 18–20. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. 2016–2030 Global Air Navigation Plan, Doc 9750-AN/963, 5th ed.; Technical Report; International Civil Aviation Organization: Montreal, QC, Canada, 2016. [Google Scholar]
- DFS Deutsche Flugsicherung. AIP Germany Part AD, Airport Munich (EDDM), AMDT 03/20. Available online: https://www.ead.eurocontrol.int (accessed on 1 May 2020).
- NOAA National Centers for Environmental Prediction (NCEP). NOAA/NCEP Global Forecast System (GFS) Atmospheric Model. Available online: https://www.emc.ncep.noaa.gov/emc/pages/numerical_forecast_systems/gfs.php (accessed on 19 April 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft | 10 km | 20 km | 60 km | |||
|---|---|---|---|---|---|---|
| Mean | STD | Mean | STD | Mean | STD | |
| [m] | [m] | [m] | [m] | [m] | [m] | |
| A320 | 2088 | 1822 | 6533 | 5593 | 13,156 | 10,993 |
| B737 | 804 | 679 | 1900 | 1634 | 3784 | 3369 |
| B777 | 821 | 709 | 2247 | 1922 | 5274 | 4286 |
| Aircraft | Gross Mass [kg] | 10 km | 20 km | 60 km | |||
|---|---|---|---|---|---|---|---|
| Mean | STD | Mean | STD | Mean | STD | ||
| [m] | [m] | [m] | [m] | [m] | [m] | ||
| A320 | 39,000 | 355 | 69 | 490 | 110 | 197 | 52 |
| 58,000 | 204 | 40 | 246 | 52 | 336 | 86 | |
| 77,000 | 183 | 37 | 226 | 46 | 227 | 57 | |
| B737 | 41,500 | 395 | 77 | 429 | 96 | 196 | 52 |
| 60,200 | 221 | 44 | 214 | 45 | 328 | 85 | |
| 79,000 | 185 | 38 | 221 | 45 | 344 | 92 | |
| B777 | 145,000 | 320 | 61 | 511 | 111 | 215 | 57 |
| 246,500 | 157 | 32 | 236 | 49 | 727 | 207 | |
| 347,500 | 83 | 16 | 188 | 37 | 268 | 69 | |
| Percentile | Gates of ADS-B Funnels | Gates of Optimized Funnels | |||
|---|---|---|---|---|---|
| Size | Spacing | Size | Spacing | ||
| [m] | [m] | [m] | [m] | ||
| Width | 0.05 | 2112 | 106 | 1874 | 94 |
| 0.5 | 4793 | 240 | 10,556 | 528 | |
| 0.95 | 7542 | 377 | 19,797 | 989 | |
| Height | 0.05 | 1367 | 34 | 434 | 11 |
| 0.5 | 2946 | 73 | 1719 | 43 | |
| 0.95 | 4612 | 115 | 3558 | 89 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lindner, M.; Zeh, T.; Braßel, H.; Rosenow, J.; Fricke, H. Traffic Flow Funnels Based on Aircraft Performance for Optimized Departure Procedures. Future Transp. 2022, 2, 711-733. https://doi.org/10.3390/futuretransp2030040
Lindner M, Zeh T, Braßel H, Rosenow J, Fricke H. Traffic Flow Funnels Based on Aircraft Performance for Optimized Departure Procedures. Future Transportation. 2022; 2(3):711-733. https://doi.org/10.3390/futuretransp2030040
Chicago/Turabian StyleLindner, Martin, Thomas Zeh, Hannes Braßel, Judith Rosenow, and Hartmut Fricke. 2022. "Traffic Flow Funnels Based on Aircraft Performance for Optimized Departure Procedures" Future Transportation 2, no. 3: 711-733. https://doi.org/10.3390/futuretransp2030040
APA StyleLindner, M., Zeh, T., Braßel, H., Rosenow, J., & Fricke, H. (2022). Traffic Flow Funnels Based on Aircraft Performance for Optimized Departure Procedures. Future Transportation, 2(3), 711-733. https://doi.org/10.3390/futuretransp2030040