
The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review


Abstract
:1. Introduction
- The traffic and environmental benefits of CCAVs are well understood, but quantification may be inappropriate and inconsistent at this stage because of the lack of appropriate modeling and simulation tools and of field trials.
- Setting goals for mobility management analysis will dictate how the system will be optimized, but this is likely to undermine the results because of a lack of perception of the future transportation infrastructure.
- Research efforts are slowly revealing the pathway to the CCAVs regime, e.g., the use of intersection control, but requires consistent and steady efforts and this paper contributes to this by providing future research direction.
2. Methods
3. Results
3.1. Traffic Management in the Regime of CCAV
3.2. Network Performance in the Presence of CAVs
- Location/area of the study:
- Simulations and field trials
- Model use
3.3. Mobility Management, including Congestion and Incident Detection
4. Discussion and Future Direction
- A need for extending the current practices by the utilization of large-scale simulation models in assessing traffic management strategies, with a special emphasis on the planning of large events. Attention will be given to the modeling of sustainable and innovative multimodal services, along with how the mass use of such services can benefit the transport supply holistically. Furthermore, the development of models capable of CCAVs will contribute to traffic simulation exploitation by quantifying the impact of traffic control measures, such as lane closures, tolls, recommended speeds, and other cooperative intelligent transport system devices that will be needed in future connected and automated transport systems.
- Existing studies have demonstrated the successful utilization of data from CCAV applications in detecting events and conditions that require special attention, as far as traffic management is concerned. However, the potential of CAVs as controllers of traffic has not as yet been assessed. Thus, investigations are required as to how autonomous vehicles will be controlled centrally vs. locally, how they can be used as assistive technologies for traffic management, and how AVs will control the speed of a platoon of vehicles to harmonize traffic flow on a link or to reduce queuing at intersections.
- Furthermore, this paper has not been accompanied by a consideration of how different traffic management strategies can improve the state of the network if this is required. In addition, the potential traffic and environmental benefits of CCAVs, in relation to mobility management concepts such as MaaS, are yet to be explored.
- Issues regarding the design and testing of different cases wherein mixed traffic scenarios at various networks need to be specified. Such case studies may explore drivers’ reactions in the presence of CAVs, the seamless and cooperative interaction of human-driven and autonomous connected vehicles, the different network configurations, and the infrastructure’s technological readiness levels.
- The research studies on CAVs are still predominately based on the perspective of the current transportation system, which will be partially or even completely changed in the future, e.g., the CAVs’ temporary waiting area may be different from the conventional taxi stand and may be inaccessible for passengers. Understanding the design needs, integration, and implementation research should be a focus of research. In addition, whether CCAVs will be deployed at specific roadways, such as on a smart motorway or in the overall network, is still unclear, and the benefits and potential risks of such a system are also unknown.
- There is a serious need for assessing how obsolete infrastructure will be phased out, and its economic impact on a larger scale needs to be better understood.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
| Section and Topic | Item # | Item Description | Location Where Item Is Reported |
|---|---|---|---|
| TITLE | |||
| Title | 1 | Identify the report as a systematic review. | 1 |
| ABSTRACT | |||
| Abstract | 2 | See the PRISMA 2020 for Abstracts checklist. | 2 |
| INTRODUCTION | |||
| Rationale | 3 | Describe the rationale for the review in the context of existing knowledge. | 4 |
| Objectives | 4 | Provide an explicit statement of the objective(s) or question(s) the review addresses. | 4 |
| METHODS | |||
| Eligibility criteria | 5 | Specify the inclusion and exclusion criteria for the review and how studies were grouped for the syntheses. | 4 and 5 |
| Information sources | 6 | Specify all databases, registers, websites, organizations, reference lists and other sources searched or consulted to identify studies. Specify the date when each source was last searched or consulted. | 5 |
| Search strategy | 7 | Present the full search strategies for all databases, registers, and websites, including any filters and limits used. | 4 |
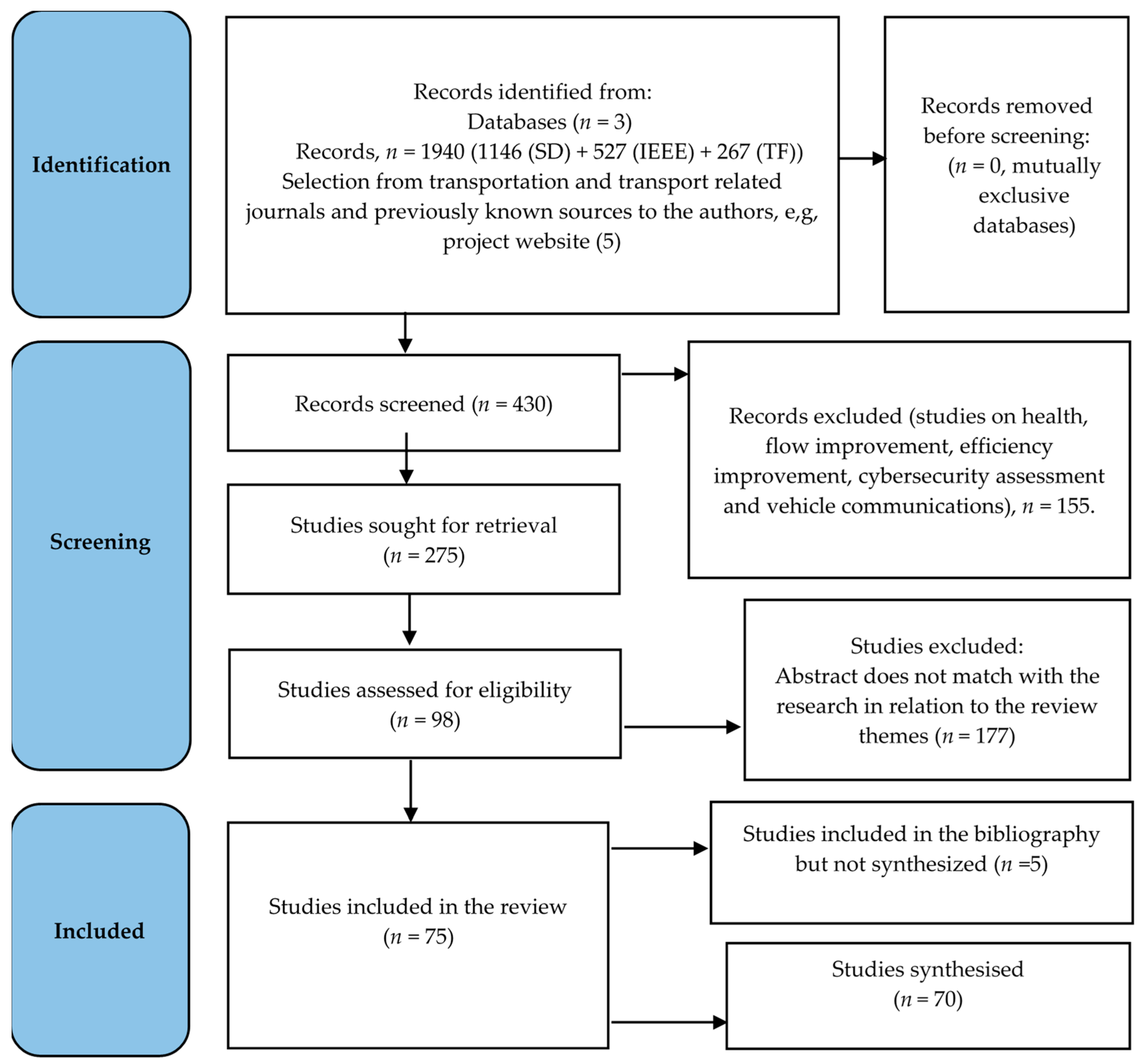
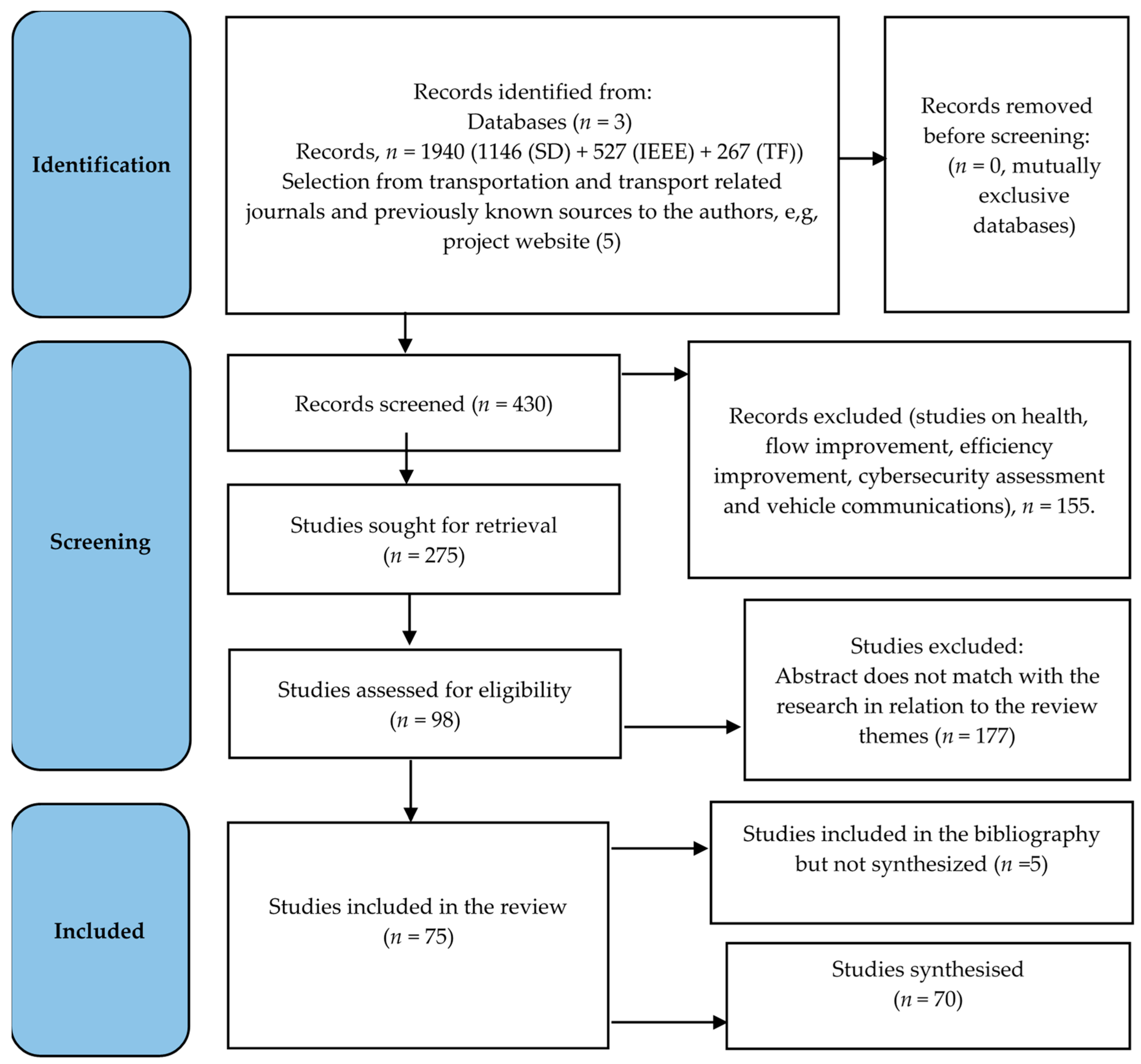
| Selection process | 8 | Specify the methods used to decide whether a study met the inclusion criteria of the review, including how many reviewers screened each record and each report retrieved, whether they worked independently, and if applicable, details of automation tools used in the process. | 4 and 5 Figure 1 |
| Data collection process | 9 | Specify the methods used to collect data from reports, including how many reviewers collected data from each report, whether they worked independently, any processes for obtaining or confirming data from study investigators, and if applicable, details of automation tools used in the process. | 5 |
| Data items | 10a | List and define all outcomes for which data were sought. Specify whether all results that were compatible with each outcome domain in each study were sought (e.g., for all measures, time points, analyses), and if not, the methods used to decide which results to collect. | 5 and 6 |
| 10b | List and define all other variables for which data were sought (e.g., participant and intervention characteristics, funding sources). Describe any assumptions made about any missing or unclear information. | 5 | |
| Study risk of bias assessment | 11 | Specify the methods used to assess the risk of bias in the included studies, including details of the tool(s) used, how many reviewers assessed each study and whether they worked independently, and if applicable, details of automation tools used in the process. | Not Applicable |
| Effect measures | 12 | Specify for each outcome the effect measure(s) (e.g., risk ratio, mean difference) used in the synthesis or presentation of results. | Not Applicable |
| Synthesis methods | 13a | Describe the processes used to decide which studies were eligible for each synthesis (e.g., tabulating the study intervention characteristics and comparing against the planned groups for each synthesis (item #5)). | 5 |
| 13b | Describe any methods required to prepare the data for presentation or synthesis, such as the handling of missing summary statistics, or data conversions. | 5 | |
| 13c | Describe any methods used to tabulate or visually display results of individual studies and syntheses. | 5 | |
| 13d | Describe any methods used to synthesize results and provide a rationale for the choice(s). If meta-analysis was performed, describe the model(s), method(s) to identify the presence and extent of statistical heterogeneity, and software package(s) used. | 5 | |
| 13e | Describe any methods used to explore possible causes of heterogeneity among study results (e.g., subgroup analysis, meta-regression). | 6 | |
| 13f | Describe any sensitivity analyses conducted to assess the robustness of the synthesized results. | Not Applicable | |
| Reporting bias assessment | 14 | Describe any methods used to assess the risk of bias due to missing results in a synthesis (arising from reporting biases). | Not Applicable |
| Certainty assessment | 15 | Describe any methods used to assess certainty (or confidence) in the body of evidence for an outcome. | 6 |
| RESULTS | |||
| Study selection | 16a | Describe the results of the search and selection process, from the number of records identified in the search to the number of studies included in the review, ideally using a flow diagram. | Figure 1 |
| 16b | Cite studies that might appear to meet the inclusion criteria, but which were excluded, and explain why they were excluded. | 177 studies, not listed | |
| Study characteristics | 17 | Cite each included study and present its characteristics. | 6–12 |
| Risk of bias in studies | 18 | Present assessments of risk of bias for each included study. | Not Applicable |
| Results of individual studies | 19 | For all outcomes, present, for each study: (a) summary statistics for each group (where appropriate) and (b) effect estimates and their precision (e.g., confidence/credibility interval), ideally using structured tables or plots. | 6–12 Table 1 |
| Results of syntheses | 20a | For each synthesis, briefly summarize the characteristics and risk of bias among contributing studies. | Not Applicable |
| 20b | Present results of all statistical syntheses conducted. If meta-analysis was done, present for each the summary estimate and its precision (e.g., confidence/credibility interval) and measures of statistical heterogeneity. If comparing groups, describe the direction of the effect. | ||
| 20c | Present results of all investigations of possible causes of heterogeneity among study results. | ||
| 20d | Present results of all sensitivity analyses conducted to assess the robustness of the synthesized results. | ||
| Reporting biases | 21 | Present assessments of risk of bias due to missing results (arising from reporting biases) for each synthesis assessed. | |
| Certainty of evidence | 22 | Present assessments of certainty (or confidence) in the body of evidence for each outcome assessed. | |
| DISCUSSION | |||
| Discussion | 23a | Provide a general interpretation of the results in the context of other evidence. | 12 and 13 |
| 23b | Discuss any limitations of the evidence included in the review. | 13 | |
| 23c | Discuss any limitations of the review processes used. | 13 | |
| 23d | Discuss implications of the results for practice, policy, and future research. | 13 | |
| OTHER INFORMATION | |||
| Registration and protocol | 24a | Provide registration information for the review, including register name and registration number, or state that the review was not registered. | Not Applicable |
| 24b | Indicate where the review protocol can be accessed, or state that a protocol was not prepared. | Not Applicable | |
| 24c | Describe and explain any amendments to the information provided at registration or in the protocol. | Not Applicable | |
| Support | 25 | Describe the sources of financial or non-financial support for the review, and the role of the funders or sponsors in the review. | 14 |
| Competing interests | 26 | Declare any competing interests of the review authors. | 14 |
| Availability of data, code, and other materials | 27 | Report which of the following are publicly available and where they can be found template data collection forms; data extracted from included studies; data used for all analyses; analytical code; any other materials used in the review. | 14 |
References
- Gandia, R.M.; Antonialli, F.; Cavazza, B.H.; Neto, A.M.; de Lima, D.A.; Sugano, J.Y.; Nicolai, I.; Zambalde, A.L. Autonomous vehicles: Scientometric and bibliometric review. Transp. Rev. 2019, 39, 9–28. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Ren, J.; Hung, P.C.K. Chapter 34-Modeling and Simulation for Connected and Automated Vehicle (CAV) Deployment and Performance Evaluation; Vacca, J., Ed.; Smart Cities Policies and Financing; Elsevier: Amsterdam, The Netherlands, 2022; pp. 481–510. [Google Scholar]
- Elliott, D.; Keen, W.; Miao, L. Recent advances in connected and automated vehicles. J. Traffic Transp. Eng. 2019, 6, 109–131. [Google Scholar] [CrossRef]
- Frontier Next-Generation Network and Traffic Management for Future Mobility. Available online: http://www.frontier-project.eu/ (accessed on 14 March 2022).
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef] [PubMed]
- Thomas, J.; Harden, A. Methods for the thematic synthesis of qualitative research in systematic reviews. BMC Med. Res. Methodol. 2008, 8, 45. [Google Scholar] [CrossRef] [Green Version]
- Bian, Y.; Zheng, Y.; Ren, W.; Li, S.E.; Wang, J.; Li, K. Reducing time headway for platooning of connected vehicles via V2V communication. Transp. Res. Part C Emerg. Technol. 2019, 102, 87–105. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Blokpoel, R.J.; Cartolano, F.; Cataldi, P.; Gonzalez, A.; Lazaro, O.; Leguay, J.; Lin, L.; Maneros, J.; Rondinone, M. iTETRIS-A System for the Evaluation of Cooperative Traffic Management Solutions; Meyer, G., Valldorf, J., Eds.; Advanced Microsystems for Automotive Applications 20; Springer: Berlin/Heidelberg, Germany, 2010; pp. 399–410. [Google Scholar]
- Chang, X.; Li, H.; Rong, J.; Zhao, X.; Li, A. Analysis on traffic stability and capacity for mixed traffic flow with platoons of intelligent connected vehicles. Phys. A Stat. Mech. Its Appl. 2020, 557, 124829. [Google Scholar] [CrossRef]
- Chen, B.; Sun, D.; Zhou, J.; Wong, W.; Ding, Z. A future intelligent traffic system with mixed autonomous vehicles and human-driven vehicles. Inf. Sci. 2020, 529, 59–72. [Google Scholar] [CrossRef]
- Du, M.; Liu, J.; Chen, Q. Improving traffic efficiency during yellow lights using connected vehicles. Phys. A Stat. Mech. Its Appl. 2021, 578, 126108. [Google Scholar] [CrossRef]
- Ghiasi, A.; Li, X.; Ma, J. A mixed traffic speed harmonization model with connected autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 104, 210–233. [Google Scholar] [CrossRef]
- Gomides, T.S.; De Grande, R.E.; de Souza, A.M.; Souza, F.S.; Villas, L.A.; Guidoni, D.L. An adaptive and Distributed Traffic Management System using Vehicular Ad-hoc Networks. Comput. Commun. 2020, 159, 317–330. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Zheng, T.; Hu, X.; Feng, H.; Li, Y. Evaluating the performance of vehicular platoon control under different network topologies of initial states. Phys. A Stat. Mech. Its Appl. 2016, 450, 359–368. [Google Scholar] [CrossRef]
- Lu, G.; Nie, Y.; Liu, X.; Li, D. Trajectory-based traffic management inside an autonomous vehicle zone. Transp. Res. Part B Methodol. 2019, 120, 76–98. [Google Scholar] [CrossRef]
- Qian, G.; Guo, M.; Zhang, L.; Wang, Y.; Hu, S.; Wang, D. Traffic scheduling and control in fully connected and automated networks. Transp. Res. Part C Emerg. Technol. 2021, 126, 103011. [Google Scholar] [CrossRef]
- Sharma, A.; Zheng, Z.; Kim, J.; Bhaskar, A.; Mazharul Haque, M. Assessing traffic disturbance, efficiency, and safety of the mixed traffic flow of connected vehicles and traditional vehicles by considering human factors. Transp. Res. Part C Emerg. Technol. 2021, 124, 102934. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Tettamanti, T.; Mohammadi, A.; Asadi, H.; Varga, I. A two-level urban traffic control for autonomous vehicles to improve network-wide performance. Transp. Res. Procedia 2017, 27, 913–920. [Google Scholar] [CrossRef]
- Chavhan, S.; Venkataram, P. Prediction based traffic management in a metropolitan area. J. Traffic Transp. Eng. 2020, 7, 447–466. [Google Scholar] [CrossRef]
- Deveci, M.; Pamucar, D.; Gokasar, I. Fuzzy Power Heronian function based CoCoSo method for the advantage prioritization of autonomous vehicles in real-time traffic management. Sustain. Cities Soc. 2021, 69, 102846. [Google Scholar] [CrossRef]
- Wang, S.; Lin, X. Eco-driving control of connected and automated hybrid vehicles in mixed driving scenarios. Appl. Energy 2020, 271, 115233. [Google Scholar] [CrossRef]
- Yang, Y.; Ma, F.; Wang, J.; Zhu, S.; Gelbal, S.Y.; Kavas-Torris, O.; Aksun-Guvenc, B.; Guvenc, L. Cooperative ecological cruising using hierarchical control strategy with optimal sustainable performance for connected automated vehicles on varying road conditions. J. Clean. Prod. 2020, 275, 123056. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, K. Online predictive connected and automated eco-driving on signalized arterials considering traffic control devices and road geometry constraints under uncertain traffic conditions. Transp. Res. Part B Methodol. 2021, 145, 80–117. [Google Scholar] [CrossRef]
- Ma, C.; Yu, C.; Yang, X. Trajectory planning for connected and automated vehicles at isolated signalized intersections under mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2021, 130, 103309. [Google Scholar] [CrossRef]
- Amini, E.; Omidvar, A.; Elefteriadou, L. Optimizing operations at freeway weaves with connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2021, 126, 103072. [Google Scholar] [CrossRef]
- Bhargava, K.; Choy, K.W.; Jennings, P.A.; Birrell, S.A.; Higgins, M.D. Traffic simulation of connected and autonomous freight vehicles (CAV-F) using a data-driven traffic model of a real-world road tunnel. Transp. Eng. 2020, 2, 100011. [Google Scholar] [CrossRef]
- Chen, J.; Liang, H.; Li, J.; Xu, Z. A novel distributed cooperative approach for mixed platoon consisting of connected and automated vehicles and human-driven vehicles. Phys. A Stat. Mech. Its Appl. 2021, 573, 125939. [Google Scholar] [CrossRef]
- Chen, P.; Wang, T.; Zheng, N. Reconstructing vehicle trajectories on freeways based on motion detection data of connected and automated vehicles. J. Intell. Transp. Syst. 2022, 1–16. Available online: https://www.tandfonline.com/doi/abs/10.1080/15472450.2021.1955211 (accessed on 1 April 2022). [CrossRef]
- Dayi, Q.; Yanfeng, J.; Tao, W.; Bin, L.; Lewei, H. Research on coordinated control of vehicle’s speed in new mixed traffic flow. J. Intell. Transp. Syst. 2022, 1–13. Available online: https://www.tandfonline.com/doi/full/10.1080/15472450.2021.1973897 (accessed on 1 April 2022). [CrossRef]
- Jing, S.; Zhao, X.; Hui, F.; Khattak, A.J.; Yang, L. Cooperative CAVs optimal trajectory planning for collision avoidance and merging in the weaving section. Transportmetrica B 2021, 9, 219–236. [Google Scholar] [CrossRef]
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transport. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Pohlmann, H.; Wu, F.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Li, J.; Yu, C. Shared-phase-dedicated-lane based intersection control with mixed traffic of human-driven vehicles and connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2022, 135, 103509. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Traffic management with autonomous and connected vehicles at single-lane roundabouts. Transp. Res. Part C Emerg. Technol. 2021, 125, 102964. [Google Scholar] [CrossRef]
- Rubin, I.; Baiocchi, A.; Sunyoto, Y.; Turcanu, I. Traffic management and networking for autonomous vehicular highway systems. Ad Hoc Netw. 2019, 83, 125–148. [Google Scholar] [CrossRef] [Green Version]
- Sala, M.; Soriguera, F. Capacity of a freeway lane with platoons of autonomous vehicles mixed with regular traffic. Transp. Res. Part B Methodol. 2021, 147, 116–131. [Google Scholar] [CrossRef]
- Subraveti, N.; Sharan, H.H.; Srivastava, A.; Ahn, S.; Knoop, V.L.; van Arem, B. On lane assignment of connected automated vehicles: Strategies to improve traffic flow at diverge and weave bottlenecks. Transp. Res. Part C Emerg. Technol. 2021, 127, 103126. [Google Scholar] [CrossRef]
- Woo, S.; Skabardonis, A. Flow-aware platoon formation of Connected Automated Vehicles in a mixed traffic with human-driven vehicles. Transp. Res. Part C Emerg. Technol. 2021, 133, 103442. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, F.; Liu, W.; Lodewijks, G. Modelling the traffic in a mixed network with autonomous-driving expressways and non-autonomous local streets. Transp. Res. Part E Logist. Transp. Rev. 2020, 134, 101855. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, D.Z.W.; Zhu, F. Influence of CAVs platooning on intersection capacity under mixed traffic. Phys. A Stat. Mech. Its Appl. 2022, 593, 126989. [Google Scholar] [CrossRef]
- Yao, Z.; Hu, R.; Jiang, Y.; Xu, T. Stability and safety evaluation of mixed traffic flow with connected automated vehicles on expressways. J. Saf. Res. 2020, 75, 262–274. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Phys. A Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Lou, Y.; Li, P.; Hong, X. A distributed framework for network-wide traffic monitoring and platoon information aggregation using V2V communications. Transp. Res. Part C Emerg. Technol. 2016, 69, 356–374. [Google Scholar] [CrossRef]
- Li, Z.; Xing, G.; Zhao, X.; Li, H. Impact of the connected vehicle environment on tunnel entrance zone. Accid. Anal. Prev. 2021, 157, 106145. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Zhang, J.; Li, Y.; Huang, Z.; Cao, H. Modeling and simulation of vehicle group collaboration behaviors in an on-ramp area with a connected vehicle environment. Simul. Model. Pract. Theory 2021, 110, 102332. [Google Scholar] [CrossRef]
- Alam, M.S.; Perugu, H.; McNabola, A. A comparison of route-choice navigation across air pollution exposure, CO2 emission and traditional travel cost factors. Transp. Res. Part D Transp. Environ. 2018, 65, 82–100. [Google Scholar] [CrossRef]
- Bahrami, S.; Roorda, M.J. Optimal traffic management policies for mixed human and automated traffic flows. Transp. Res. Part A Policy Pract. 2020, 135, 130–143. [Google Scholar] [CrossRef]
- Comert, G.; Begashaw, N. Cycle-to-cycle queue length estimation from connected vehicles with filtering on primary parameters. Int. J. Transp. Sci. Technol. 2021, 11, 283–297. [Google Scholar] [CrossRef]
- Makridisa, M.; Mattasa, K.; Ciuffoa, B.; Raposoa, M.A.; Toledob, T.; Thiela, C. Connected and Automated Vehicles on a Freeway Scenario. Effect on Traffic Congestion and Network Capacity. In Proceedings of the 7th Transport Research Arena TRA 2018, Vienna, Austria, 16–19 April 2018. [Google Scholar]
- Mena-Oreja, J.; Gozalvez, J.; Sepulcre, M. Effect of the Configuration of Platooning Maneuvers on the Traffic Flow under Mixed Traffic Scenarios. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–4. [Google Scholar]
- Patel, R.; Levin, M.W.; Boyles, S.D. Effects of Autonomous Vehicle Behavior on Arterial and Freeway Networks. Transp. Res. Rec. 2016, 2561, 9–17. [Google Scholar] [CrossRef]
- Stanek, D.; Milam, R.T.; Huang, E.; Wang, Y. Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation. In Proceedings of the Transportation Research Board 97th Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Sun, K.; Zhao, X.; Wu, X. A cooperative lane change model for connected and autonomous vehicles on two lanes highway by considering the traffic efficiency on both lanes. Transp. Res. Interdiscip. Perspect. 2021, 9, 100310. [Google Scholar] [CrossRef]
- Tani, R.; Sumalee, A.; Uchida, K. Travel time reliability-based optimization problem for CAVs dedicated lanes. Transp. A 2021, 1–32. Available online: https://www.tandfonline.com/doi/abs/10.1080/23249935.2021.1954107?journalCode=ttra21 (accessed on 1 April 2022). [CrossRef]
- Wang, Z.; Zhao, X.; Chen, Z.; Li, X. A dynamic cooperative lane-changing model for connected and autonomous vehicles with possible accelerations of a preceding vehicle. Expert Syst. Appl. 2021, 173, 114675. [Google Scholar] [CrossRef]
- Zhou, M.; Qu, X.; Qi, W. Improving efficiency at highway T-junctions with connected and automated vehicles. Transportmetrica A 2021, 17, 107–123. [Google Scholar] [CrossRef]
- James, R.M.; Melson, C.; Hu, J.; Bared, J. Characterizing the impact of production adaptive cruise control on traffic flow: An investigation. Transp. B 2019, 7, 992–1012. [Google Scholar] [CrossRef]
- Cherkaoui, B.; Beni-Hssane, A.; Fissaoui, M.E.; Erritali, M. Road traffic congestion detection in VANET networks. Procedia Comput. Sci. 2019, 151, 1158–1163. [Google Scholar] [CrossRef]
- Akabane, A.T.; Immich, R.; Bittencourt, L.F.; Madeira, E.R.M.; Villas, L.A. Towards a distributed and infrastructure-less vehicular traffic management system. Comput. Commun. 2020, 151, 306–319. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.S.; McNabola, A. A critical review and assessment of Eco-Driving policy & technology: Benefits & limitations. Transp. Policy 2014, 35, 42–49. [Google Scholar]
- Bahamonde-Birke, F.J.; Goletz, M.; Ettema, D. The provision of mobility as a service with autonomous vehicles. Necessity Regul. Schemes A Nat. Monop. Res. Transp. Econ. 2020, 90, 100993. [Google Scholar]
- Bauza, R.; Gozalvez, J. Traffic congestion detection in large-scale scenarios using vehicle-to-vehicle communications. J. Netw. Comput. Appl. 2013, 36, 1295–1307. [Google Scholar] [CrossRef]
- de Sousa, R.S.; Boukerche, A.; Loureiro, A.A.F. A distributed and low-overhead traffic congestion control protocol for vehicular ad hoc networks. Comput. Commun. 2020, 159, 258–270. [Google Scholar] [CrossRef]
- Enzi, M.; Parragh, S.N.; Pisinger, D.; Prandtstetter, M. Modeling and solving the multimodal car- and ride-sharing problem. Eur. J. Oper. Res. 2021, 293, 290–303. [Google Scholar] [CrossRef]
- Georgakis, P.; Almohammad, A.; Bothos, E.; Magoutas, B.; Arnaoutaki, K.; Mentzas, G. Heuristic-Based Journey Planner for Mobility as a Service (MaaS). Sustainability 2020, 12, 10140. [Google Scholar] [CrossRef]
- Kerner, B.S. Effect of autonomous driving on traffic breakdown in mixed traffic flow: A comparison of classical ACC with three-traffic-phase-ACC (TPACC). Phys. A Stat. Mech. Its Appl. 2021, 562, 125315. [Google Scholar] [CrossRef]
- Medina-Tapia, M.; Robusté, F. Exploring paradigm shift impacts in urban mobility: Autonomous Vehicles and Smart Cities. Transp. Res. Procedia 2018, 33, 203–210. [Google Scholar] [CrossRef]
- Mourtakos, V.; Oikonomou, M.G.; Kopelias, P.; Vlahogianni, E.I.; Yannis, G. Impacts of autonomous on-demand mobility service: A simulation experiment in the City of Athens. Transp. Lett. 2021, 1–13. Available online: https://www.tandfonline.com/doi/abs/10.1080/19427867.2021.2000571 (accessed on 1 April 2022). [CrossRef]
- Outay, F.; Kamoun, F.; Kaisser, F.; Alterri, D.; Yasar, A. V2V and V2I Communications for Traffic Safety and CO2 Emission Reduction: A Performance Evaluation. Procedia Comput. Sci. 2019, 151, 353–360. [Google Scholar] [CrossRef]
- Paranjothi, A.; Khan, M.S.; Zeadally, S. A survey on congestion detection and control in connected vehicles. Ad Hoc Netw. 2020, 108, 102277. [Google Scholar] [CrossRef]
- Shaheen, S.; Cohen, A. Shared Mobility: An Overview of Definitions, Current Practices, and Its Relationship to Mobility on Demand and Mobility as a Service; Vickerman, R., Ed.; International Encyclopedia of Transportation; Elsevier: Oxford, UK, 2021; pp. 155–159. [Google Scholar]
- Ta, V.; Dvir, A. A secure road traffic congestion detection and notification concept based on V2I communications. Veh. Commun. 2020, 25, 100283. [Google Scholar] [CrossRef]
- Yong-Chuan, Z.; Xiao-Qing, Z.; Li-Ting, Z.; Zhen-Ting, C. Traffic Congestion Detection Based on GPS Floating-Car Data. Procedia Eng. 2011, 15, 5541–5546. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Xu, W.; Ma, J.; Li, H.; Chen, Y.; Rong, J. Effects of connected vehicle-based variable speed limit under different foggy conditions based on simulated driving. Accid. Anal. Prev. 2019, 128, 206–216. [Google Scholar] [CrossRef]
| Topic | General Discussion | Theme 1: Traffic Management in the Regime of CCAV | Theme 2: Network Performance in the Presence of CAVs | Theme 3: Congestion, Incident Detection and Mobility Management |
|---|---|---|---|---|
| Number of Studies/Research papers | 5 | 18 | 43 (8 of them repeated *) | 26 (9 of them are repeated *) |
| List of papers | [1,2,3,5,6]. | [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24]. | [1,9,10,15,16,17,18,21] *; [25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58]. | [13,17,20,44] *; [28,36,39,41,43] **; [59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75]. |
| Study | Area of Interest | Study Focus | Traffic Type | Modeling Strategy |
|---|---|---|---|---|
| Wu et al. [41] | Intersection | Influence of CAVs platooning on intersection capacity | Mixed | Application of queueing theory, and Markov chain theory |
| Stern et al. [33] | Intersection control | Shared-phase dedicated-lane-based intersection optimization | Mixed | Algorithm and numerical models |
| Ma et al. [25] | Intersections | Trajectory planning for CAVs | Mixed | Algorithms |
| Sala and Soriguera [37] | Motorway/Expressway/Highway | Estimate of average CAVs platoon length | Mixed | Statistical analysis and iterative process |
| Chen et al. [28] | Motorway/Expressway/Highway | Assessing the stability conditions of mixed platoon system | Mixed | Mathematical modeling |
| Woo and Skabardonis [39] | Motorway/Expressway/Highway | CAVs impacts on forming platoons and traffic flow | CAVs | Microscopic traffic mode |
| Yao et al. [42] | Motorway/Expressway/Highway | Influence of CAVs on fuel consumption and emissions of mixed traffic flow | Mixed | Intelligent driving model (IDM); adaptive cruise control (ACC); cooperative adaptive cruise control (CACC) |
| Yao et al. [42] | Motorway/Expressway/Highway | Stability and safety evaluation of mixed traffic flow with CAVs | Mixed | IDM; ACC and CACC |
| Chen et al. [29] | Motorway/Expressway/Highway | Reconstruction of vehicle trajectories, based on motion detection | CAVs | IDM and simulations |
| Deveci et al. [21] | Motorway/Expressway/Highway | Prioritization of autonomous vehicles in real-time traffic management | CAVs | Fuzzy multi-criteria decision-based solution |
| Rubin et al. [36] | Motorway/Expressway/highway: Entry/exit ramps on multi-lane multi-segment highway | Structural formations of platoons and their mobility processes | Vehicles with V2V technology | M/M/1 queuing model and others |
| Nagalur et al. [38] | Motorway/Expressway/Highway: Lane bottlenecks | Lane assignment strategies: traffic flow at ‘diverge and weave’ bottlenecks | Mixed | Numerical simulations |
| Li et al. [46] | Motorway/Expressway/Highway: Merging section of an urban expressway | CAVs’ and conventional vehicles’ collaboration behaviors on the ramp area | Mixed | VISSIM simulation software |
| Wu et al. [40] | Motorway/Expressway/Highway: AV expressways and non-autonomous streets | Road users’ route choices in a mixed network consisting of both an AV and non-AV facility | Mixed | Mathematical modeling approach |
| Dayi et al. [30] | Motorway/Expressway/Highway: Bottleneck section of expressways | Prediction of vehicle trajectory | Mixed | Numerical simulation |
| Amini et al. [26] | Motorway/Expressway/Highway: Freeway weaving segments | Optimizing CAVs trajectories at freeway | CAVs | Algorithm and mathematical modeling approaches |
| Jing et al. [31] | Motorway/Expressway/Highway: On-ramp and off-ramp | Trajectory planning for collision avoidance | CAVs | The collision prediction algorithm is validated through simulation |
| Makridisa et al. [69] | Motorway/Expressway/Highway: | Evaluate the behavior of CAVs under realistic traffic conditions | CAVs | VISSIM |
| Martin-Gasulla and Elefteriadou [35] | Single-lane roundabouts | Optimal coordination of CAVs to negotiate a roundabout, as well as maximizing performance | CAVs | Algorithm-based |
| Bhargava et al. [27] | Tunnel (Dartford–Thurrock Crossing tunnel, Kent, UK.) | Traffic queues and travel times analysis | Autonomous freight vehicles vs. conventional vehicles | VISSIM simulation software |
| Li et al. [45] | Tunnel entrance | Improving driving behavior with safe decisions | CAVs and conventional vehicle environment | Research builds an experimental test platform, using driving simulation technology |
| Ye and Yamamoto, [43] | Dedicated lanes for CAVs on traffic flow throughput | Performance of the traffic flow of CAVs and mixed traffic in dedicated lanes | Mixed | Cellular automation model |
| Stanek et al. [53] | Intersections and network | CAVs penetration | 0 to 100% CAVs Penetration | VISSIM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alam, M.S.; Georgakis, P. The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review. Future Transp. 2022, 2, 589-604. https://doi.org/10.3390/futuretransp2030032
Alam MS, Georgakis P. The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review. Future Transportation. 2022; 2(3):589-604. https://doi.org/10.3390/futuretransp2030032
Chicago/Turabian StyleAlam, Md. Saniul, and Panagiotis Georgakis. 2022. "The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review" Future Transportation 2, no. 3: 589-604. https://doi.org/10.3390/futuretransp2030032
APA StyleAlam, M. S., & Georgakis, P. (2022). The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review. Future Transportation, 2(3), 589-604. https://doi.org/10.3390/futuretransp2030032