
Optimal Transport Pricing in an Age of Fully Autonomous Vehicles: Is It Getting More Complicated?



Abstract
:1. Introduction
2. Optimal Transport Tax: Basic Model
2.1. The General Model Setup
2.2. Optimization
2.2.1. Private Optimum
2.2.2. Social Optimum
2.2.3. Optimal Energy Tax
3. Optimal Transport Tax: Extended Model
4. Optimal Transport Tax: Extended Model with Driverless Vehicle Relocation
5. Final Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the Marginal Welfare Change
Appendix B. Derivation of the Optimal Energy Tax
References
- Parry, I.W.H.; Walls, M.; Harrington, W. Automobile Externalities and Policies. J. Econ. Lit. 2007, 45, 373–399. [Google Scholar] [CrossRef]
- Small, K.A.; Verhoef, E.T. The Economics of Urban Transportation; Routledge: Abingdon, UK, 2007. [Google Scholar]
- Anas, A. The cost of congestion and the benefits of congestion pricing: A general equilibrium analysis. Transp. Res. Part B Methodol. 2020, 136, 110–137. [Google Scholar] [CrossRef]
- Anas, A.; Lindsey, R. Reducing urban road transportation externalities: Road pricing in theory and in practice. Rev. Environ. Econ. Policy 2011, 5, 66–88. [Google Scholar] [CrossRef] [Green Version]
- Arnott, R.; De Palma, A.; Lindsey, R. Economics of a bottleneck. J. Urban Econ. 1990, 27, 111–130. [Google Scholar] [CrossRef]
- Lehe, L. Downtown congestion pricing in practice. Transp. Res. Part C Emerg. Technol. 2019, 100, 200–223. [Google Scholar] [CrossRef]
- Rouwendal, J.; Verhoef, E.T. Basic economic principles of road pricing: From theory to applications. Transp. Policy 2006, 13, 106–114. [Google Scholar] [CrossRef]
- Parry, I.W.H.; Small, K.A. Does Britain or the United States have the right gasoline tax? Am. Econ. Rev. 2005, 95, 1276–1289. [Google Scholar] [CrossRef] [Green Version]
- Santos, G. Road fuel taxes in Europe: Do they internalize road transport externalities? Transp. Policy 2017, 53, 120–134. [Google Scholar] [CrossRef] [Green Version]
- Hirte, G.; Tscharaktschiew, S. Optimal fuel taxes and heterogeneity of cities. Rev. Reg. Res. 2015, 35, 173–209. [Google Scholar] [CrossRef]
- Tscharaktschiew, S.; Hirte, G. The drawbacks and opportunities of carbon charges in metropolitan areas—A spatial general equilibrium approach. Ecol. Econ. 2010, 70, 339–357. [Google Scholar] [CrossRef]
- Borck, R.; Brueckner, J.K. Optimal energy taxation in cities. J. Assoc. Environ. Resour. Econ. 2018, 5, 481–516. [Google Scholar] [CrossRef] [Green Version]
- Inci, E. A review of the economics of parking. Econ. Transp. 2015, 4, 50–63. [Google Scholar] [CrossRef]
- Anderson, S.P.; De Palma, A. The economics of pricing parking. J. Urban Econ. 2004, 55, 1–20. [Google Scholar] [CrossRef]
- Tscharaktschiew, S.; Reimann, F. On employer-paid parking and parking (cash-out) policy: A formal synthesis of different perspectives. Transp. Policy 2021, 110, 499–516. [Google Scholar] [CrossRef]
- Shoup, D. Pricing curb parking. Transp. Res. Part A Policy Pract. 2021, 154, 399–412. [Google Scholar] [CrossRef]
- Ostermeijer, F.; Koster, H.; Nunes, L.; van Ommeren, J. Citywide parking policy and traffic: Evidence from Amsterdam. J. Urban Econ. 2022, 128, 103418. [Google Scholar] [CrossRef]
- Hörcher, D.; Tirachini, A. A review of public transport economics. Econ. Transp. 2021, 25, 100196. [Google Scholar] [CrossRef]
- Parry, I.W.H.; Small, K.A. Should urban transit subsidies be reduced? Am. Econ. Rev. 2009, 99, 700–724. [Google Scholar] [CrossRef] [Green Version]
- Basso, L.J.; Silva, H.E. Efficiency and substitutability of transit subsidies and other urban transport policies. Am. Econ. J. Econ. Policy 2014, 6, 1–33. [Google Scholar] [CrossRef]
- Jara-Díaz, S.R.; Gschwender, A. The effect of financial constraints on the optimal design of public transport services. Transportation 2009, 36, 65–75. [Google Scholar] [CrossRef]
- Fosgerau, M.; van Dender, K. Road pricing with complications. Transportation 2013, 40, 479–503. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Harb, M.; Stathopoulos, A.; Shiftan, Y.; Walker, J.L. What do we (Not) know about our future with automated vehicles? Transp. Res. Part C Emerg. Technol. 2021, 123, 102948. [Google Scholar] [CrossRef]
- Milakis, D.; Van Arem, B.; van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Guerra, E.; Morris, E.A. Cities, Automation, and the Self-parking Elephant in the Room. Plan. Theory Pract. 2018, 19, 291–297. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Karbasi, A.; O’Hern, S. Investigating the Impact of Connected and Automated Vehicles on Signalized and Unsignalized Intersections Safety in Mixed Traffic. Future Transp. 2022, 2, 24–40. [Google Scholar] [CrossRef]
- Zhong, H.; Li, W.; Burris, M.W.; Talebpour, A.; Sinha, K.C. Will autonomous vehicles change auto commuters’ value of travel time? Transp. Res. Part D Transp. Environ. 2020, 83, 102303. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Khalil, E.B. The impact of private autonomous vehicles on vehicle ownership and unoccupied VMT generation. Transp. Res. Part C Emerg. Technol. 2018, 90, 156–165. [Google Scholar] [CrossRef] [Green Version]
- Millard-Ball, A. The autonomous vehicle parking problem. Transp. Policy 2019, 75, 99–108. [Google Scholar] [CrossRef]
- Larson, W.; Zhao, W. Self-driving cars and the city: Effects on sprawl, energy consumption, and housing affordability. Reg. Sci. Urban Econ. 2020, 81, 103484. [Google Scholar] [CrossRef]
- Levin, M.W.; Wong, E.; Nault-Maurer, B.; Khani, A. Parking infrastructure design for repositioning autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2020, 120, 102838. [Google Scholar] [CrossRef]
- Tscharaktschiew, S.; Reimann, F.; Evangelinos, C. Repositioning of driverless cars: Is return to home rather than downtown parking economically viable? Transp. Res. Interdiscip. Perspect. 2022, 13, 100547. [Google Scholar] [CrossRef]
- Zakharenko, R. Self-driving cars will change cities. Reg. Sci. Urban Econ. 2016, 61, 26–37. [Google Scholar] [CrossRef]
- Bösch, P.M.; Ciari, F.; Axhausen, K.W. Transport policy optimization with autonomous vehicles. Trans. Res. Rec. 2018, 2672, 698–707. [Google Scholar] [CrossRef] [Green Version]
- Cohen, T.; Cavoli, C. Automated vehicles: Exploring possible consequences of government (non) intervention for congestion and accessibility. Transp. Rev. 2019, 39, 129–151. [Google Scholar] [CrossRef] [Green Version]
- Tscharaktschiew, S.; Evangelinos, C. Pigouvian road congestion pricing under autonomous driving mode choice. Transp. Res. Part C Emerg. Technol. 2019, 101, 79–95. [Google Scholar] [CrossRef]
- Sterner, T. Fuel taxes: An important instrument for climate policy. Energy Policy 2007, 35, 3194–3202. [Google Scholar] [CrossRef]
- Parry, I.W.H.; Timilsina, G.R. How should passenger travel in Mexico City be priced? J. Urban Econ. 2010, 68, 167–182. [Google Scholar] [CrossRef]
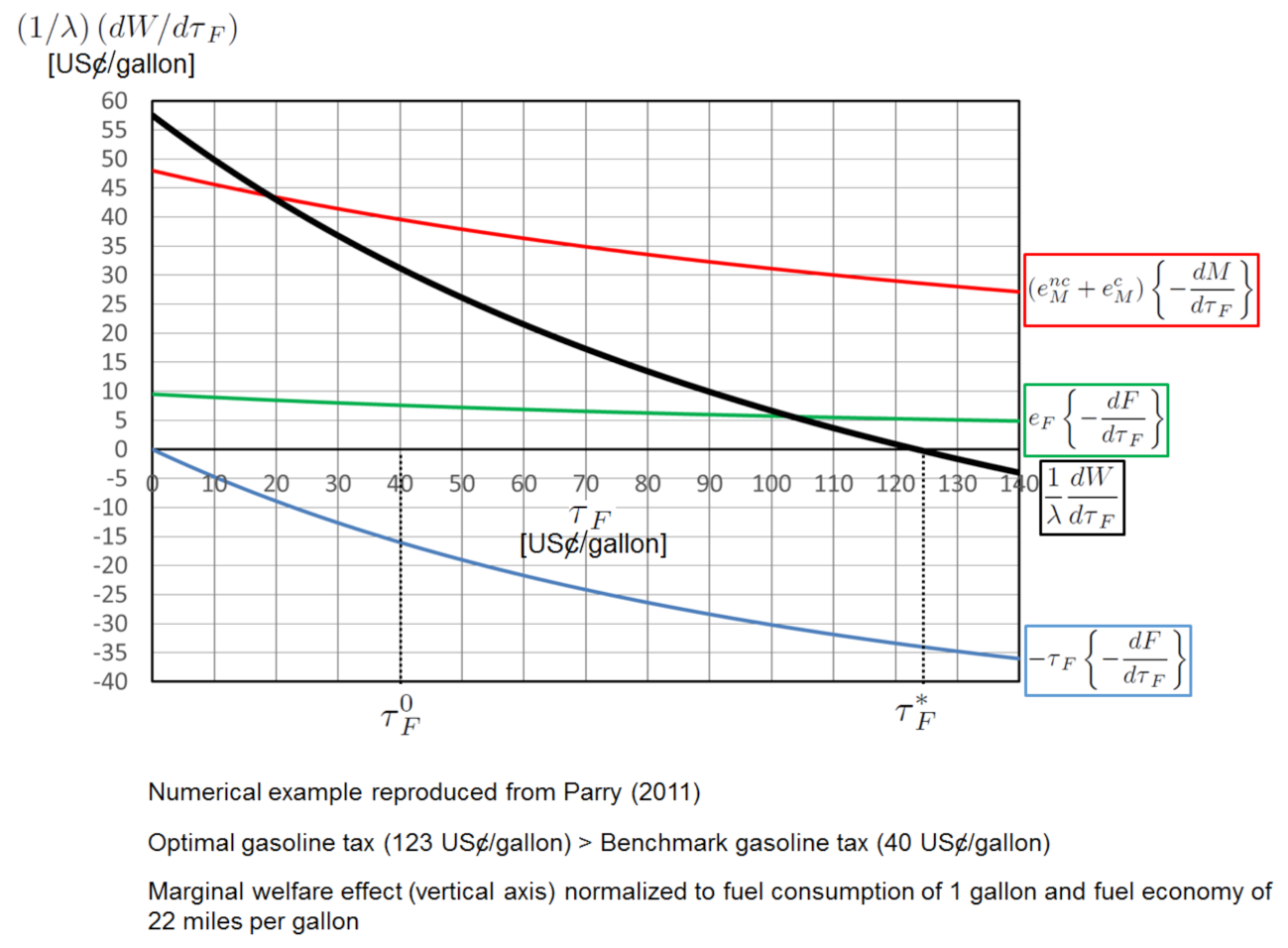
- Parry, I.W.H. How much should highway fuels be taxed? In US Energy Tax Policy, 1st ed.; Metcalf, G.E., Ed.; Cambridge University Press: New York, NY, USA, 2011; pp. 269–297. [Google Scholar]
- Tscharaktschiew, S. Shedding light on the appropriateness of the (high) gasoline tax level in Germany. Econ. Transp. 2014, 3, 189–210. [Google Scholar] [CrossRef]
- Tscharaktschiew, S. How much should gasoline be taxed when electric vehicles conquer the market? An analysis of the mismatch between efficient and existing gasoline taxes under emerging electric mobility. Transp. Res. Part D Transp. Environ. 2015, 39, 89–113. [Google Scholar] [CrossRef]
- Lin, C.-Y.C.; Prince, L. The optimal gas tax for California. Energy Policy 2009, 37, 5173–5183. [Google Scholar] [CrossRef] [Green Version]
- Wangsness, P.B. How to road price in a world with electric vehicles and government budget constraints. Transp. Res. Part D Transp. Environ. 2018, 65, 635–657. [Google Scholar] [CrossRef]
- West, S.E.; Williams, R.C., III. Optimal taxation and cross-price effects on labor supply: Estimates of the optimal gas tax. J. Public Econ. 2007, 91, 593–617. [Google Scholar] [CrossRef]
- Hirte, G.; Tscharaktschiew, S. The role of labor-supply margins in shaping optimal transport taxes. Econ. Transp. 2020, 22, 100156. [Google Scholar] [CrossRef]
- Parry, I.W.H. How should heavy-duty trucks be taxed? J. Urban Econ. 2008, 63, 651–668. [Google Scholar] [CrossRef]
- Parry, I.W.H.; Strand, J. International fuel tax assessment: An application to Chile. Environ. Dev. Econ. 2012, 17, 127–144. [Google Scholar] [CrossRef] [Green Version]
- Antón-Sarabia, A.; Hernández-Trillo, F. Optimal gasoline tax in developing, oil-producing countries: The case of Mexico. Energy Policy 2014, 67, 564–571. [Google Scholar] [CrossRef]
- Bösch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Nazari, F.; Noruzoliaee, M.; Mohammadian, A.K. Shared versus private mobility: Modeling public interest in autonomous vehicles accounting for latent attitudes. Transp. Res. Part C Emerg. Technol. 2018, 97, 456–477. [Google Scholar] [CrossRef]
- Wadud, Z.; Chintakayala, P.K. To own or not to own—That is the question: The value of owning a (fully automated) vehicle. Transp. Res. Part C. Emerg. Technol. 2021, 123, 102978. [Google Scholar] [CrossRef]
- Wadud, Z.; Mattioli, G. Fully automated vehicles: A cost-based analysis of the share of ownership and mobility services, and its socio-economic determinants. Transp. Res. Part A Policy Pract. 2021, 151, 228–244. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Meng, Q. Optimal purchase subsidy design for human-driven electric vehicles and autonomous electric vehicles. Trans. Res. Part C Emerg. Technol. 2020, 116, 102641. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Small, K.A. Valuation of travel time. Econ. Transp. 2012, 1, 2–14. [Google Scholar] [CrossRef]
- Hayashi, Y.; Kato, H.; Teodoro, R.V.R. A model system for the assessment of the effects of car and fuel green taxes on CO2 emission. Transp. Res. Part D Transp. Environ. 2001, 6, 123–139. [Google Scholar] [CrossRef]
- Santos, G.; Behrendt, H.; Maconi, L.; Shirvani, T.; Teytelboym, A. Part I: Externalities and economic policies in road transport. Res. Transp. Econ. 2010, 28, 2–45. [Google Scholar] [CrossRef]
- Ostermeijer, F.; Koster, H.; van Ommeren, J.; Nielsen, V.M. Automobiles and urban density. J. Econ. Geogr. 2022. [Google Scholar] [CrossRef]
- Pons-Rigat, A.; Proost, S.; Turró, M. Workplace parking policies in an agglomeration: An illustration for Barcelona. Econ. Transp. 2020, 24, 100194. [Google Scholar] [CrossRef]
- Gabbe, C.J.; Manville, M.; Osman, T. The opportunity cost of parking requirements: Would Silicon Valley be richer if its parking requirements were lower? J. Transp. Land Use 2021, 14, 277–301. [Google Scholar] [CrossRef]
- Onishi, A.; Cao, X.; Ito, T.; Shi, F.; Imura, H. Evaluating the potential for urban heat-island mitigation by greening parking lots. Urban For. Urban Green. 2010, 9, 323–332. [Google Scholar] [CrossRef]
- Bunten, D.M.; Rolheiser, L. People or parking? Habitat Int. 2020, 106, 102289. [Google Scholar] [CrossRef]
- Geroliminis, N. Cruising-for-parking in congested cities with an MFD representation. Econ. Transp. 2015, 4, 156–165. [Google Scholar] [CrossRef]
- Inci, E.; van Ommeren, J.N.; Kobus, M. The external cruising costs of parking. J. Econ. Geogr. 2017, 17, 1301–1323. [Google Scholar] [CrossRef] [Green Version]
- Shoup, D.C. Cruising for parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Van Ommeren, J.; McIvor, M.; Mulalic, I.; Inci, E. A novel methodology to estimate cruising for parking and related external costs. Transp. Res. Part B Methodol. 2021, 145, 247–269. [Google Scholar] [CrossRef]
- Chester, M.; Fraser, A.; Matute, J.; Flower, C.; Pendyala, R. Parking infrastructure: A constraint on or opportunity for urban redevelopment? A study of Los Angeles County parking supply and growth. J. Am. Assoc. 2015, 81, 268–286. [Google Scholar] [CrossRef]
- Molenda, I.; Sieg, G. Residential parking in vibrant city districts. Econ. Transp. 2013, 2, 131–139. [Google Scholar] [CrossRef] [Green Version]
- Khayati, Y.; Kang, J.E.; Karwan, M.; Murray, C. Household use of autonomous vehicles with ride sourcing. Transp. Res. Part C Emerg. Technol. 2021, 125, 102998. [Google Scholar] [CrossRef]
- Khayati, Y.; Kang, J.E.; Karwan, M.; Murray, C. Household Activity Pattern Problem with Autonomous Vehicles. Netw. Spat. Econ. 2021, 21, 609–637. [Google Scholar] [CrossRef]
- Simoni, M.D.; Kockelman, K.M.; Gurumurthy, K.M.; Bischoff, J. Congestion pricing in a world of self-driving vehicles: An analysis of different strategies in alternative future scenarios. Transp. Res. Part C Emerg. Technol. 2019, 98, 167–185. [Google Scholar] [CrossRef] [Green Version]
- Cutter, W.B.; Franco, S.F. Do parking requirements significantly increase the area dedicated to parking? A test of the effect of parking requirements values in Los Angeles County. Transp. Res. Part A Policy Pract. 2012, 46, 901–925. [Google Scholar] [CrossRef] [Green Version]
- Davis, L.W.; Knittel, C.R. Are fuel economy standards regressive? J. Assoc. Environ. Resour. Econ. 2019, 6, S37–S63. [Google Scholar] [CrossRef] [Green Version]
- De Borger, B.; Proost, S. Traffic externalities in cities: The economics of speed bumps, low emission zones and city bypasses. J. Urban Econ. 2013, 76, 53–70. [Google Scholar] [CrossRef]
- Nie, Y.M. On the potential remedies for license plate rationing. Econ. Transp. 2017, 9, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Nitzsche, E.; Tscharaktschiew, S. Efficiency of speed limits in cities: A spatial computable general equilibrium assessment. Transp. Res. Part A Policy Pract. 2013, 56, 23–48. [Google Scholar] [CrossRef]
- Tscharaktschiew, S. Why are highway speed limits really justified? An equilibrium speed choice analysis. Transp. Res. Part B Methodol. 2020, 138, 317–351. [Google Scholar] [CrossRef]
- Cascetta, E.; Cartenì, A.; Di Francesco, L. Do autonomous vehicles drive like humans? A Turing approach and an application to SAE automation Level 2 cars. Transp. Res. Part C Emerg. Technol. 2022, 134, 103499. [Google Scholar] [CrossRef]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Are we ready to embrace connected and self-driving vehicles? A case study of Texans. Transportation 2018, 45, 641–675. [Google Scholar] [CrossRef]
- Daziano, R.A.; Sarrias, M.; Leard, B. Are consumers willing to pay to let cars drive for them? Analyzing response to autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 150–164. [Google Scholar] [CrossRef] [Green Version]
- Cartenì, A. The acceptability value of autonomous vehicles: A quantitative analysis of the willingness to pay for shared autonomous vehicles (SAVs) mobility services. Transp. Res. Interdiscipl. Perspect. 2020, 8, 100224. [Google Scholar] [CrossRef]
- Becker, F.; Axhausen, K.W. Literature review on surveys investigating the acceptance of automated vehicles. Transportation 2017, 44, 1293–1306. [Google Scholar] [CrossRef] [Green Version]
- Wali, B.; Santi, P.; Ratti, C. Modeling consumer affinity towards adopting partially and fully automated vehicles—The role of preference heterogeneity at different geographic levels. Transp. Res. Part C Emerg. Technol. 2021, 129, 103276. [Google Scholar] [CrossRef]
- Elvik, R. The demand for automated vehicles: A synthesis of willingness-to-pay surveys. Econ. Transp. 2020, 23, 100179. [Google Scholar] [CrossRef]
- Sheela, P.V.; Mannering, F. The effect of information on changing opinions toward autonomous vehicle adoption: An exploratory analysis. Int. J. Sustain. Transp. 2020, 14, 475–487. [Google Scholar] [CrossRef]
- Liu, P.; Guo, Q.; Ren, F.; Wang, L.; Xu, Z. Willingness to pay for self-driving vehicles: Influences of demographic and psychological factors. Transp. Res. Part C Emerg. Technol. 2019, 100, 306–317. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Study | Instrument | Region |
|---|---|---|
| Parry and Small (2005) [8] | Gasoline tax, Miles tax | US, UK |
| Santos (2017) [9] | Gasoline tax, Diesel tax | Various European countries |
| Parry and Timilsina (2010) [40] | Gasoline tax, Miles tax | Mexico City |
| Parry (2011) [41] | Gasoline tax, Diesel tax (heavy-duty trucks) | US |
| Tscharaktschiew (2014) [42] | Gasoline tax | Germany |
| Tscharaktschiew (2015) [43] | Gasoline tax (with EV substitution) | Germany |
| Lin and Prince (2009) [44] | Gasoline tax | California |
| Wangsness (2018) [45] | Kilometer tax (peak, off-peak) | Norway (urban, rural) |
| West and Williams (2007) [46] | Gasoline tax | US |
| Hirte and Tscharaktschiew (2020) [47] | Gasoline tax, Miles tax | US, UK |
| Parry (2008) [48] | Diesel tax (heavy-duty trucks) | US |
| Parry and Strand (2012) [49] | Gasoline tax, Diesel tax (commercial trucks) | Chile |
| Antón-Sarabia and Hernández-Trillo (2014) [50] | Gasoline tax | Mexico |
| Notation | Description |
|---|---|
| U | Utility |
| X | General consumption |
| L | Leisure |
| v | Vehicle stock of the household |
| m | Vehicle mileage per traveler (occupied trips) |
| M | Vehicle mileage per household (occupied trips) |
| t | Travel time per mile |
| T | Aggregate travel time of the household |
| f | Fuel/energy consumption per mile |
| F | Aggregate fuel/energy consumption of the household |
| E | Externality index |
| Fuel/energy price | |
| Price of the composite commodity | |
| Fuel/energy tax | |
| Costs of car ownership not related to energy consumption | |
| I | Household labor income |
| Revenue recycling instrument of the government (tax or transfer) | |
| Total time endowment of the household | |
| Marginal utility of monetary household income | |
| Value of travel time | |
| Marginal external cost of fuel/energy consumption | |
| Marginal external cost of vehicle mileage | |
| W | Welfare |
| Set of parameters exogenous to the household | |
| Parking requirement per vehicle | |
| P | Parking requirement per household |
| n | Driverless vehicle mileage per traveler (unoccupied trips) |
| N | Driverless vehicle mileage per household (unoccupied trips) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tscharaktschiew, S.; Evangelinos, C. Optimal Transport Pricing in an Age of Fully Autonomous Vehicles: Is It Getting More Complicated? Future Transp. 2022, 2, 347-364. https://doi.org/10.3390/futuretransp2020019
Tscharaktschiew S, Evangelinos C. Optimal Transport Pricing in an Age of Fully Autonomous Vehicles: Is It Getting More Complicated? Future Transportation. 2022; 2(2):347-364. https://doi.org/10.3390/futuretransp2020019
Chicago/Turabian StyleTscharaktschiew, Stefan, and Christos Evangelinos. 2022. "Optimal Transport Pricing in an Age of Fully Autonomous Vehicles: Is It Getting More Complicated?" Future Transportation 2, no. 2: 347-364. https://doi.org/10.3390/futuretransp2020019
APA StyleTscharaktschiew, S., & Evangelinos, C. (2022). Optimal Transport Pricing in an Age of Fully Autonomous Vehicles: Is It Getting More Complicated? Future Transportation, 2(2), 347-364. https://doi.org/10.3390/futuretransp2020019