
Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings



Abstract
:1. Motivation
2. Literature Review
3. Study Objectives
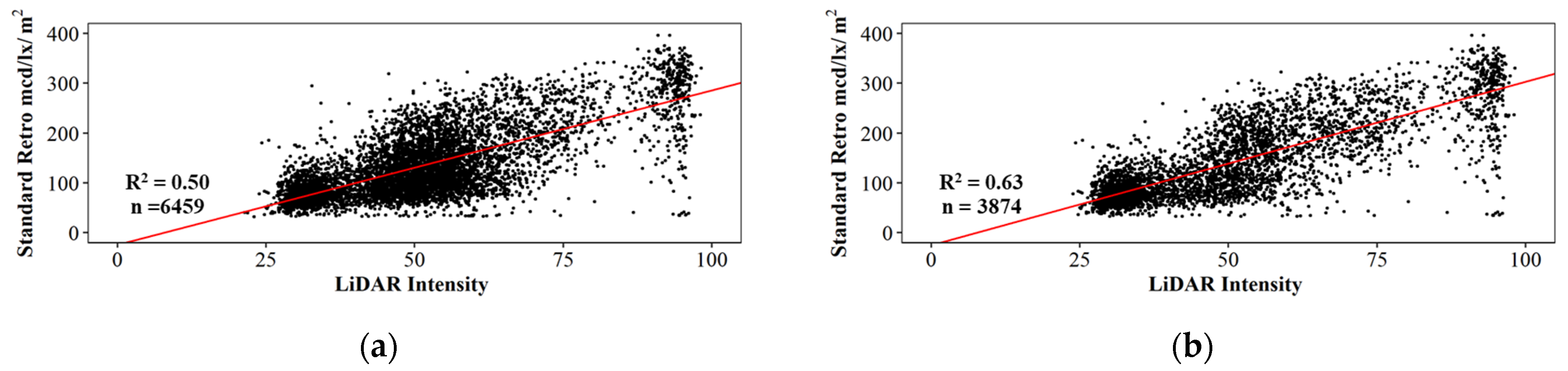
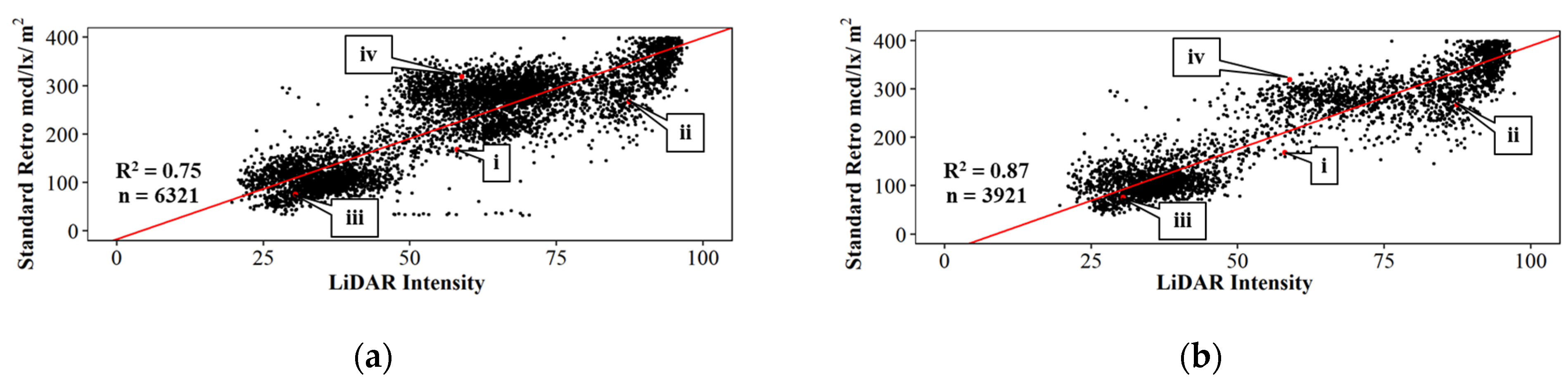
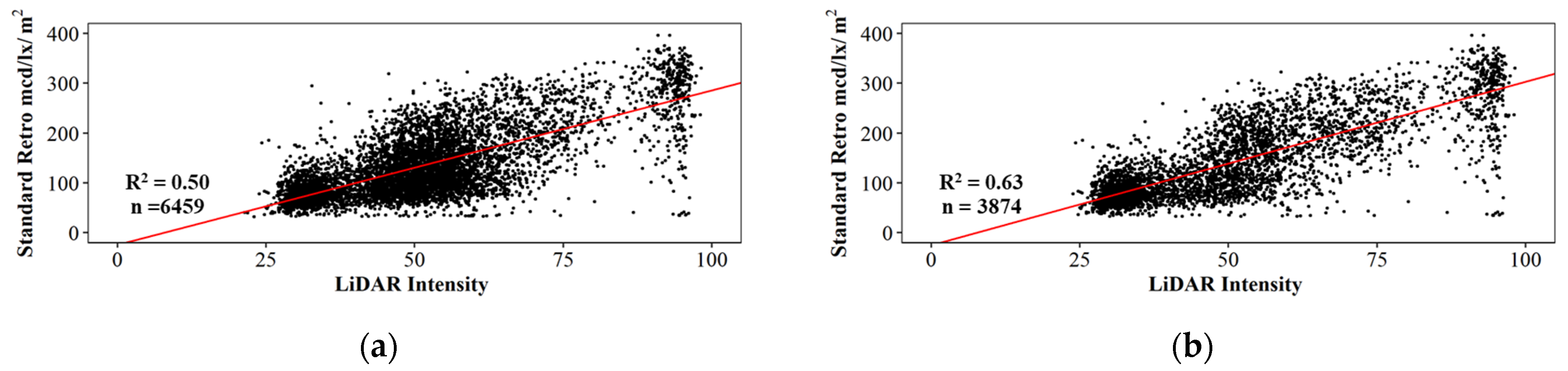
- ASTM E1710 Retroreflectivity vs. LiDAR Intensity
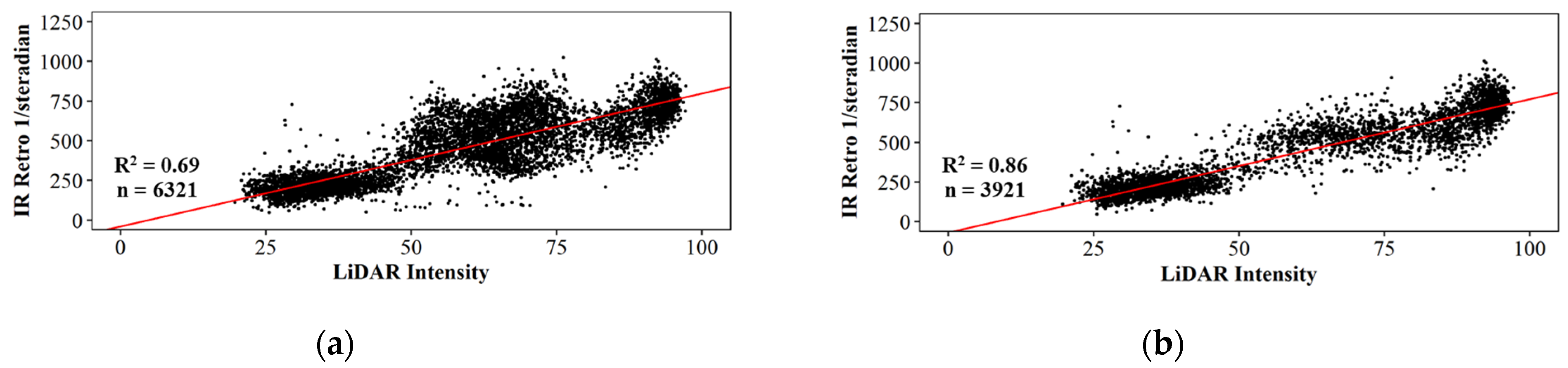
- IR Retroreflectivity vs. LiDAR Intensity
4. Equipment, Datasets, and Methods
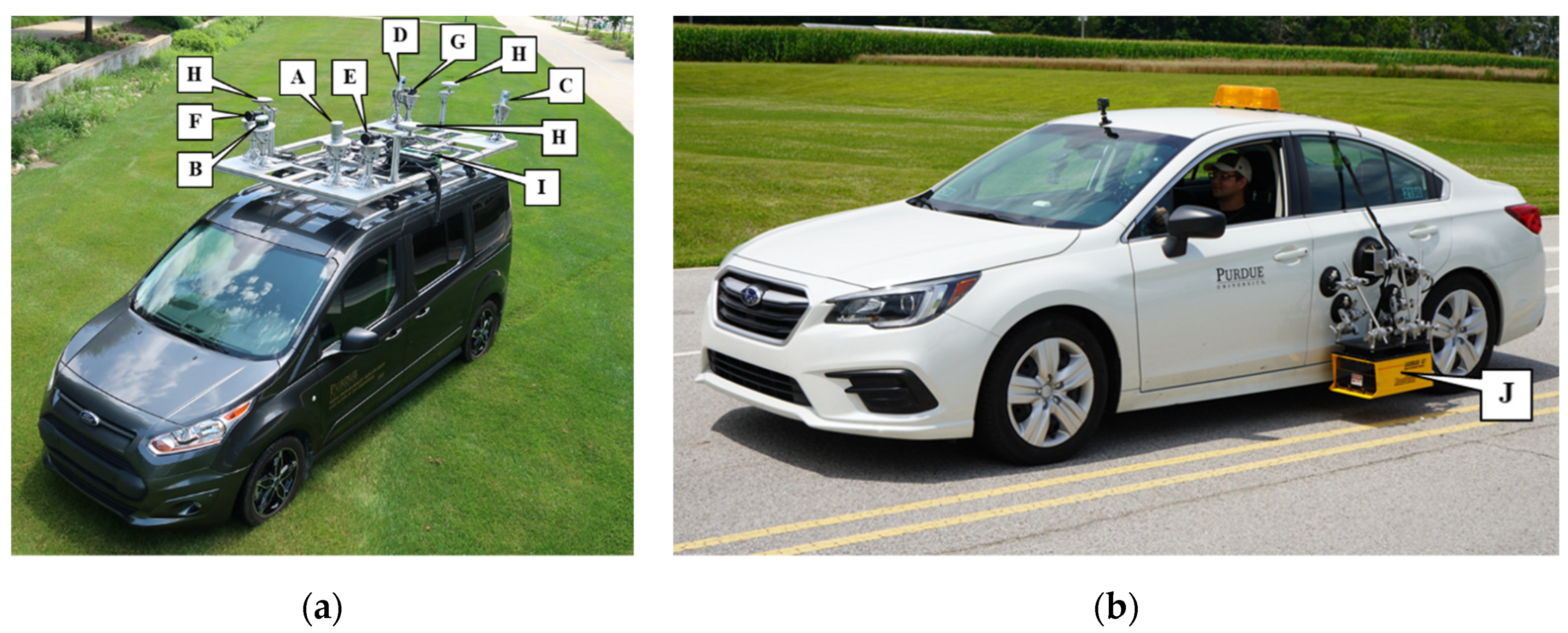
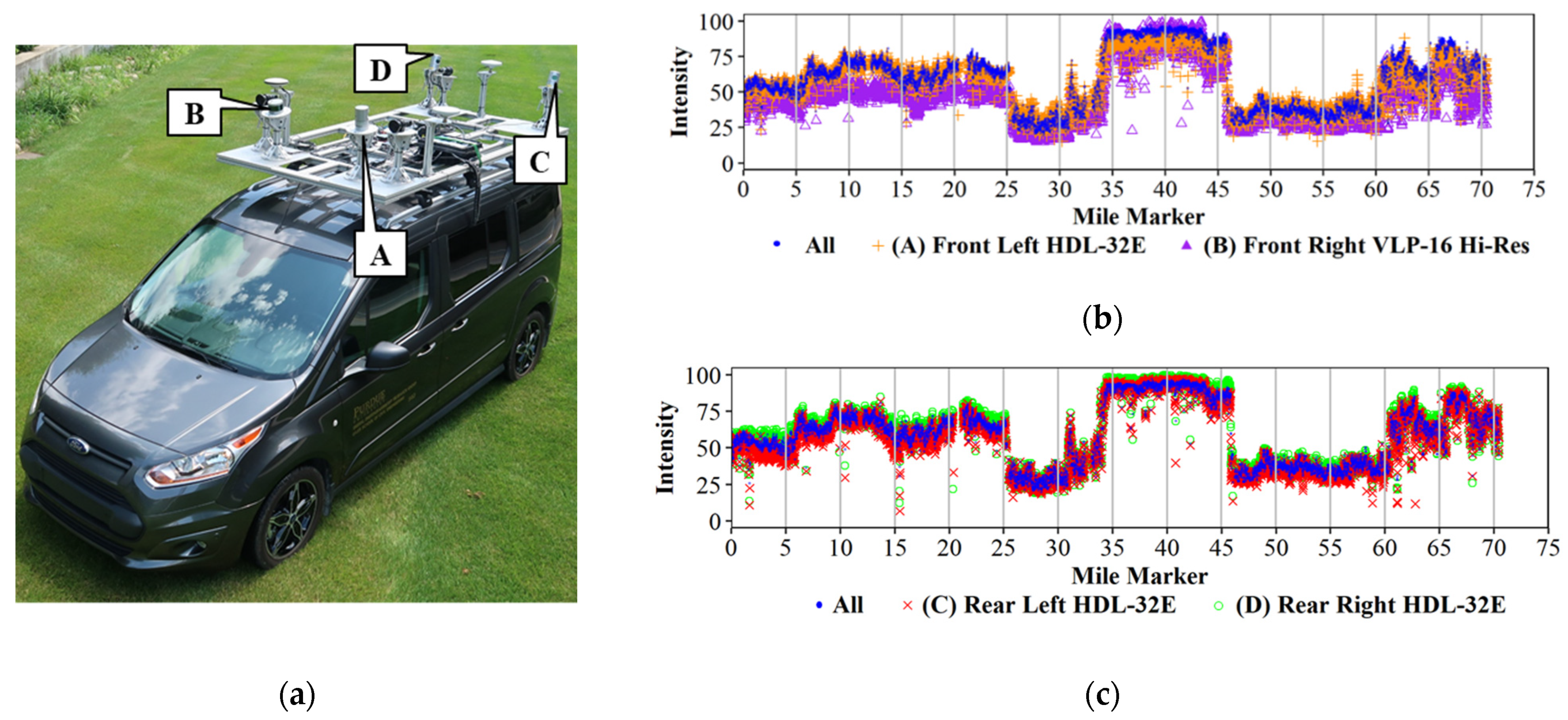
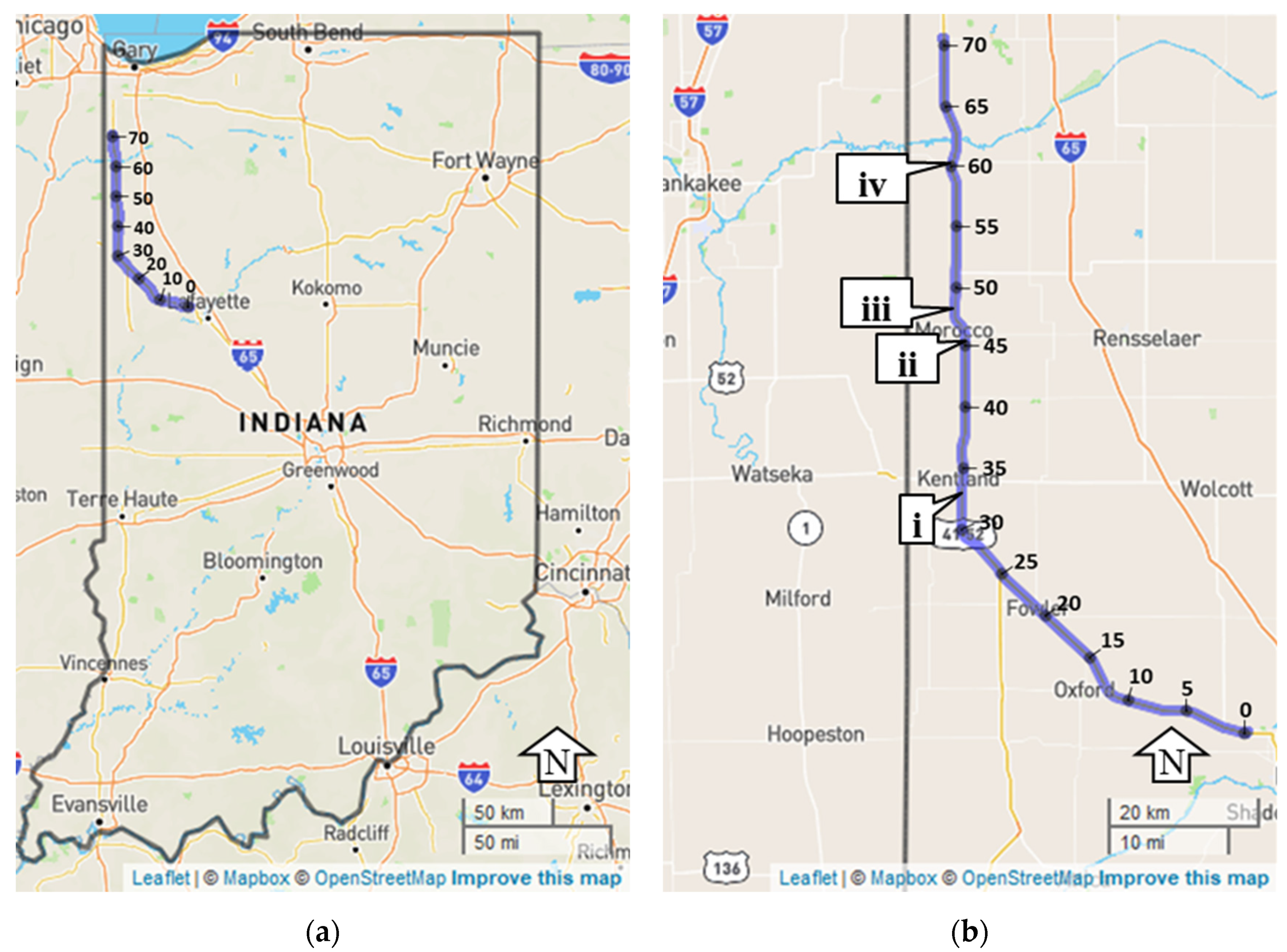
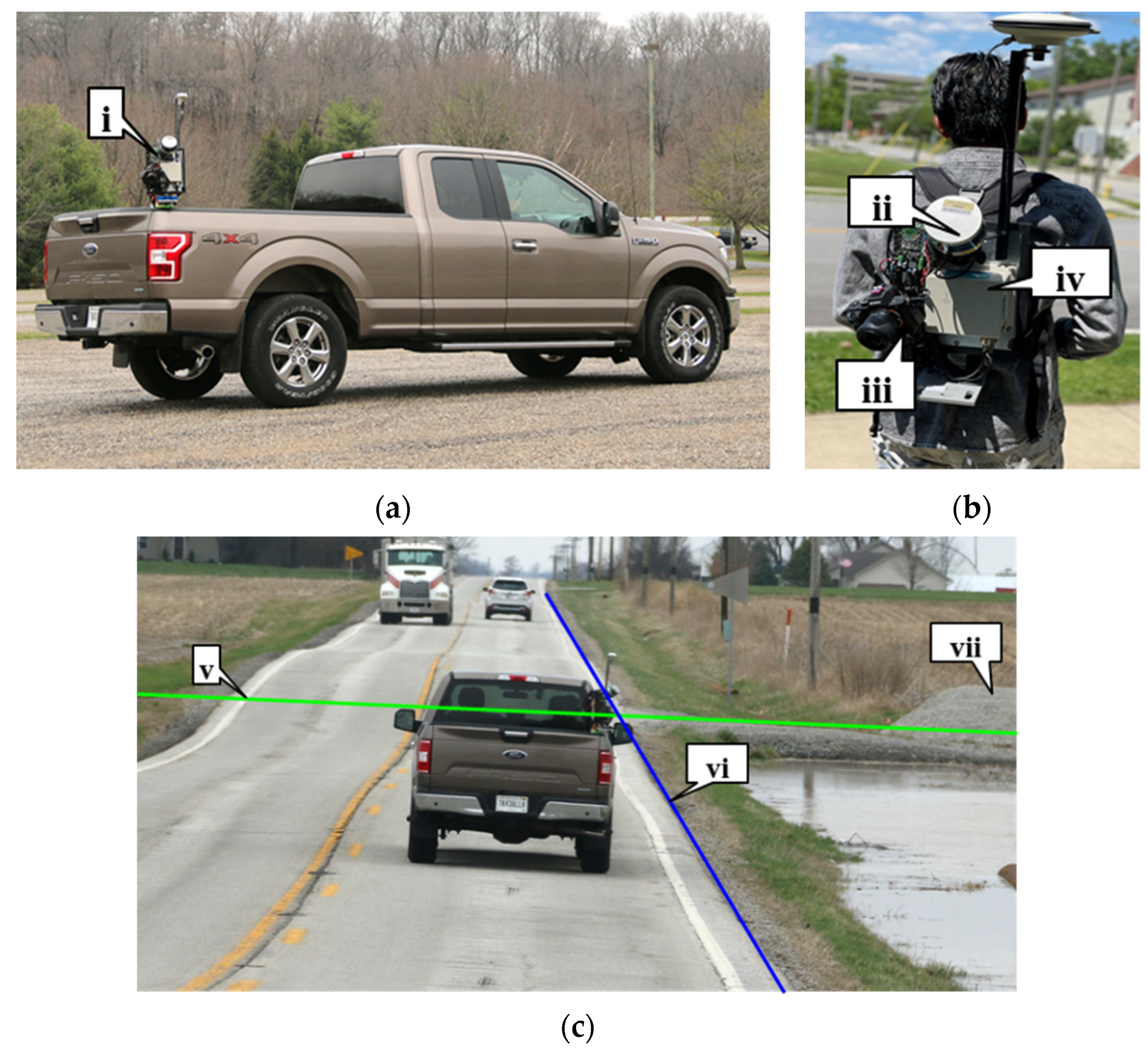
4.1. Study Route and Equipment
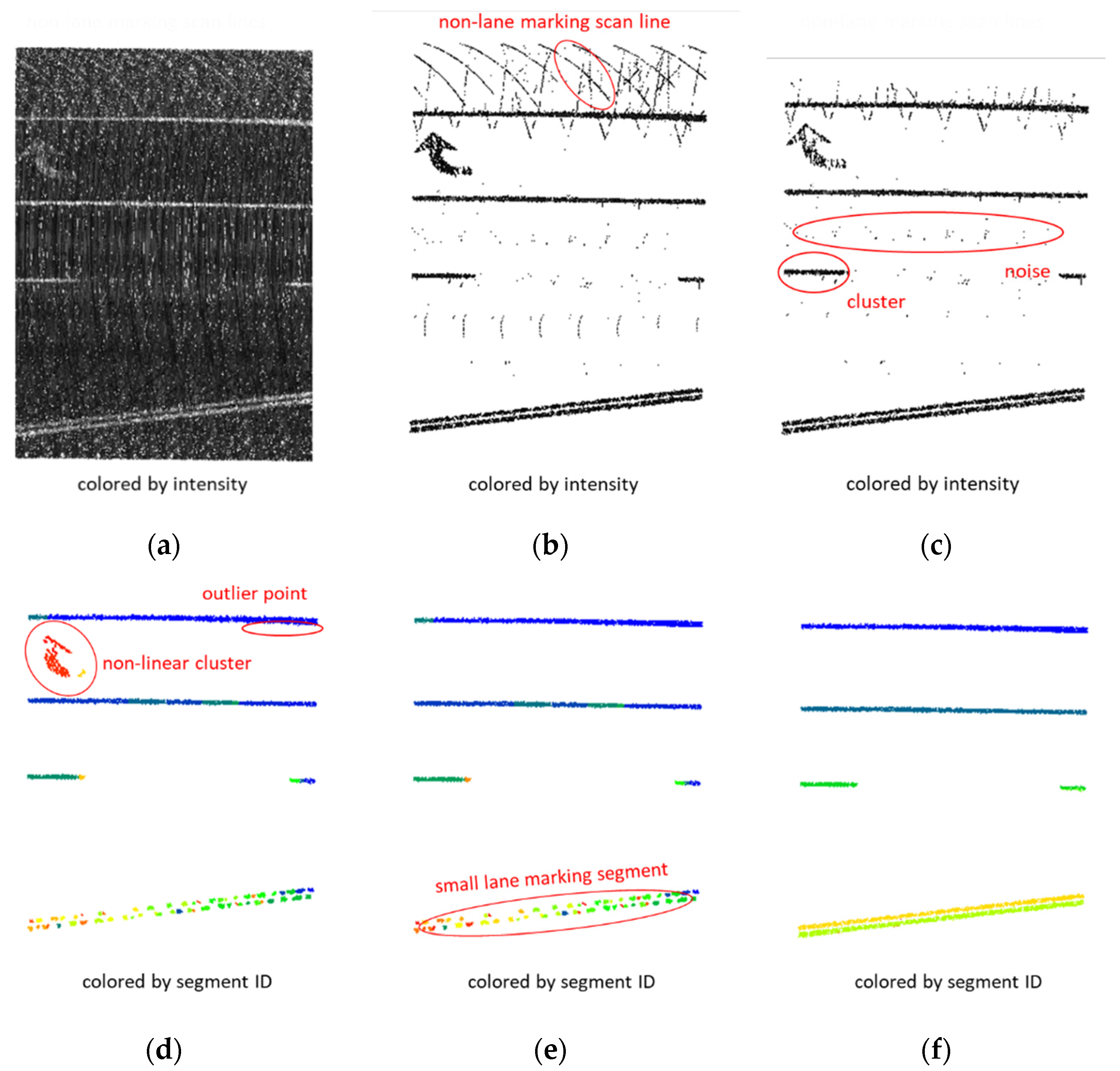
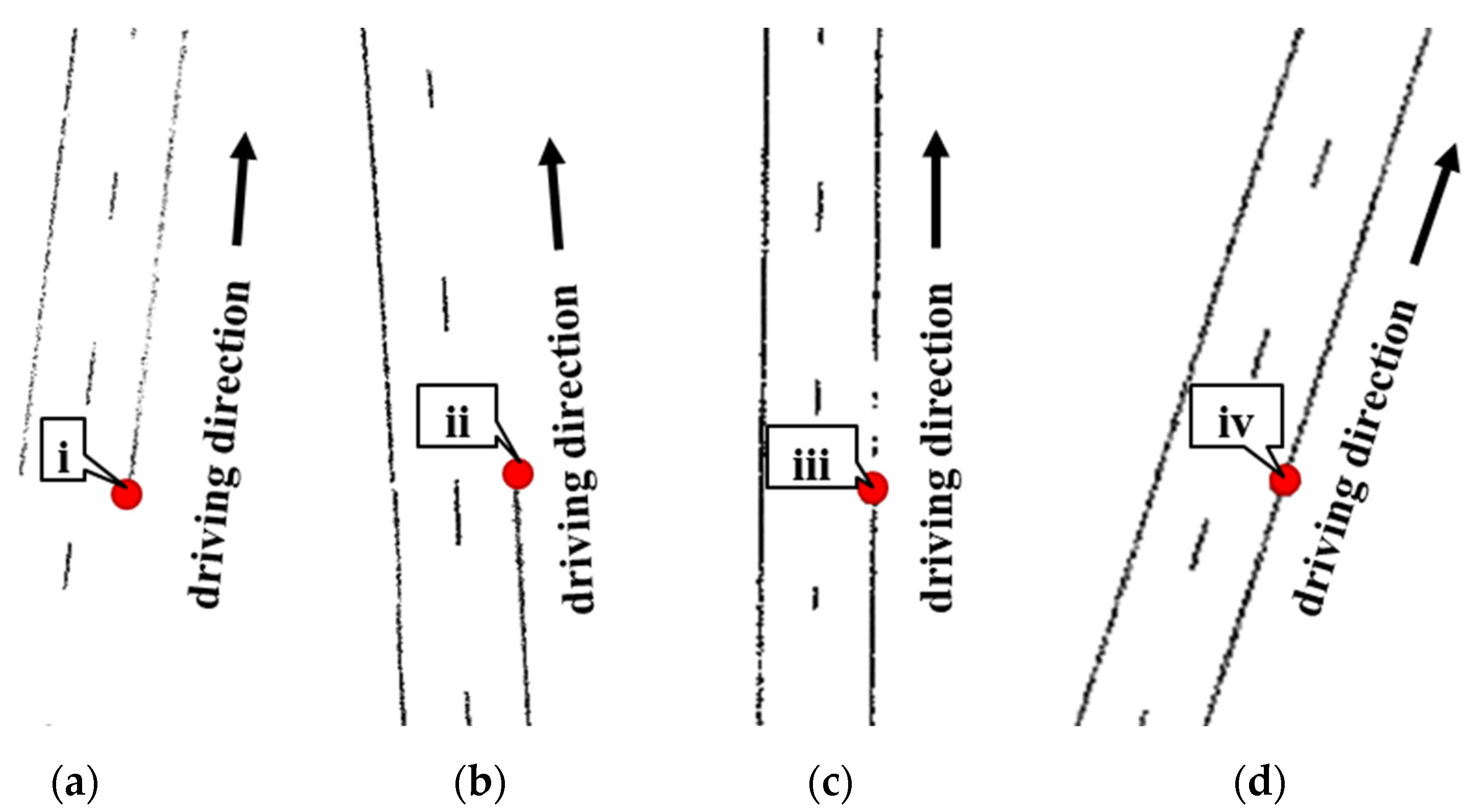
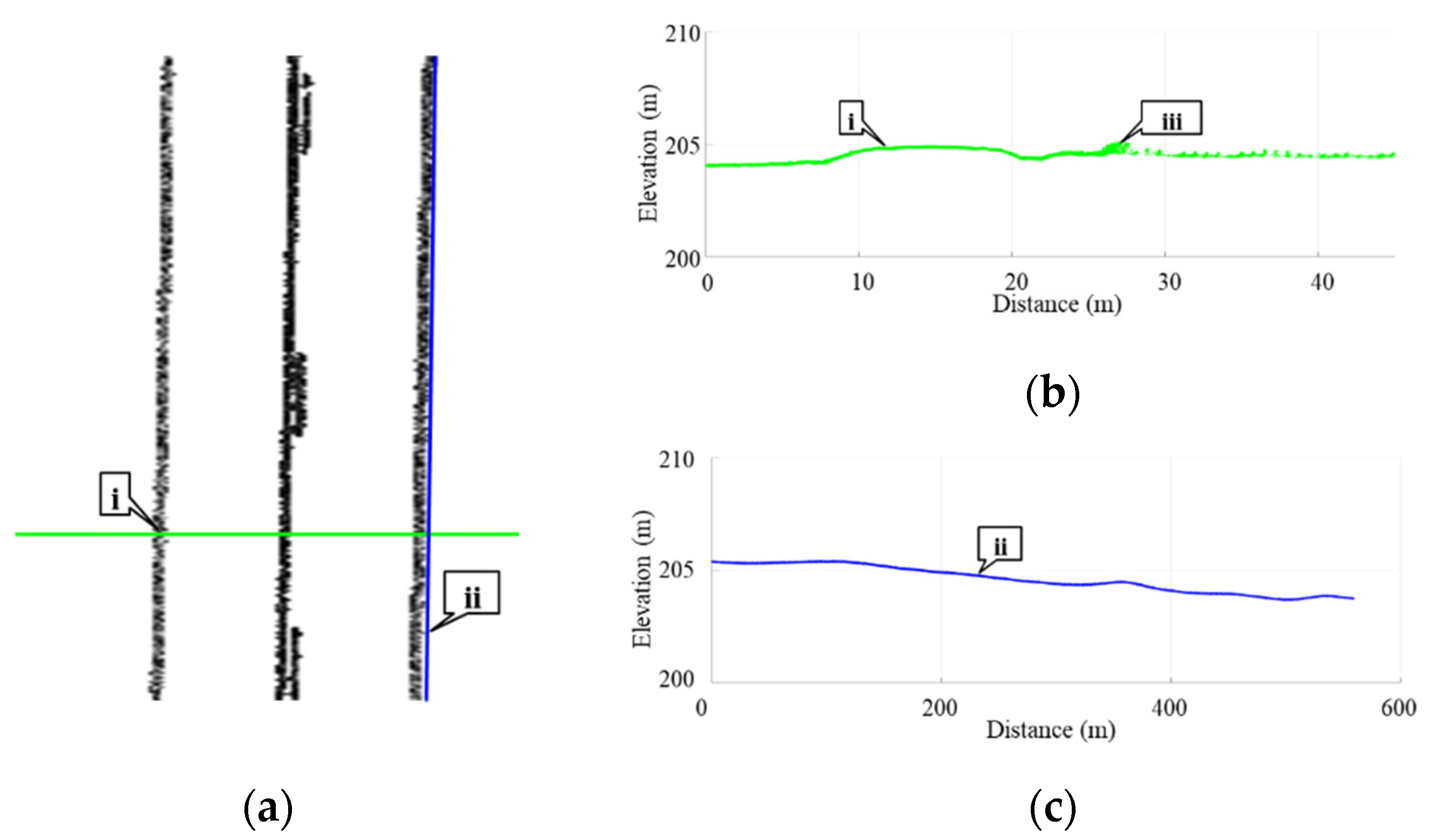
4.2. Lane Marking Extraction from LiDAR Point Clouds
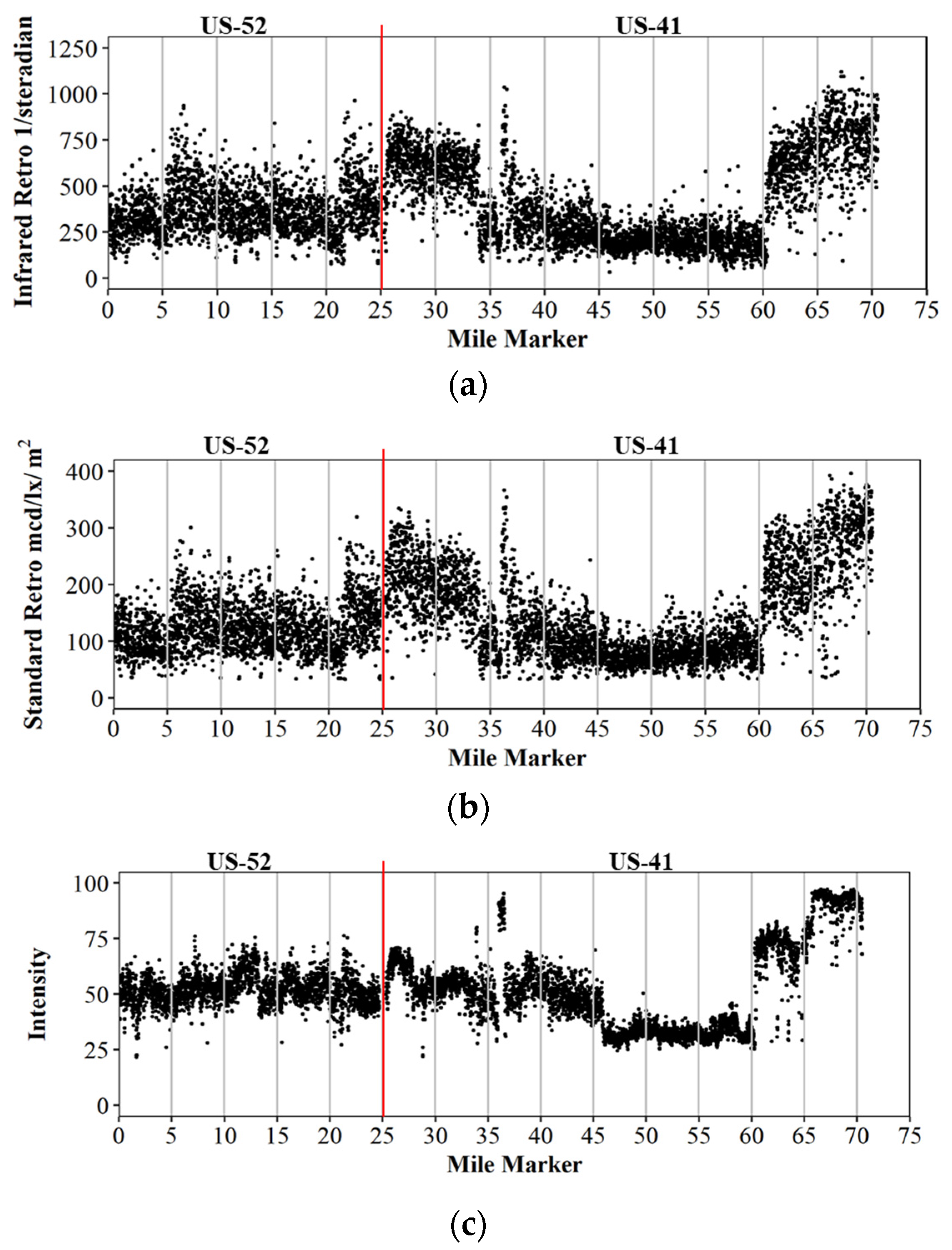
4.3. Retroreflective Data
4.4. Linear Referenced Retroreflectivity and LiDAR Intensity
5. Results and Discussion
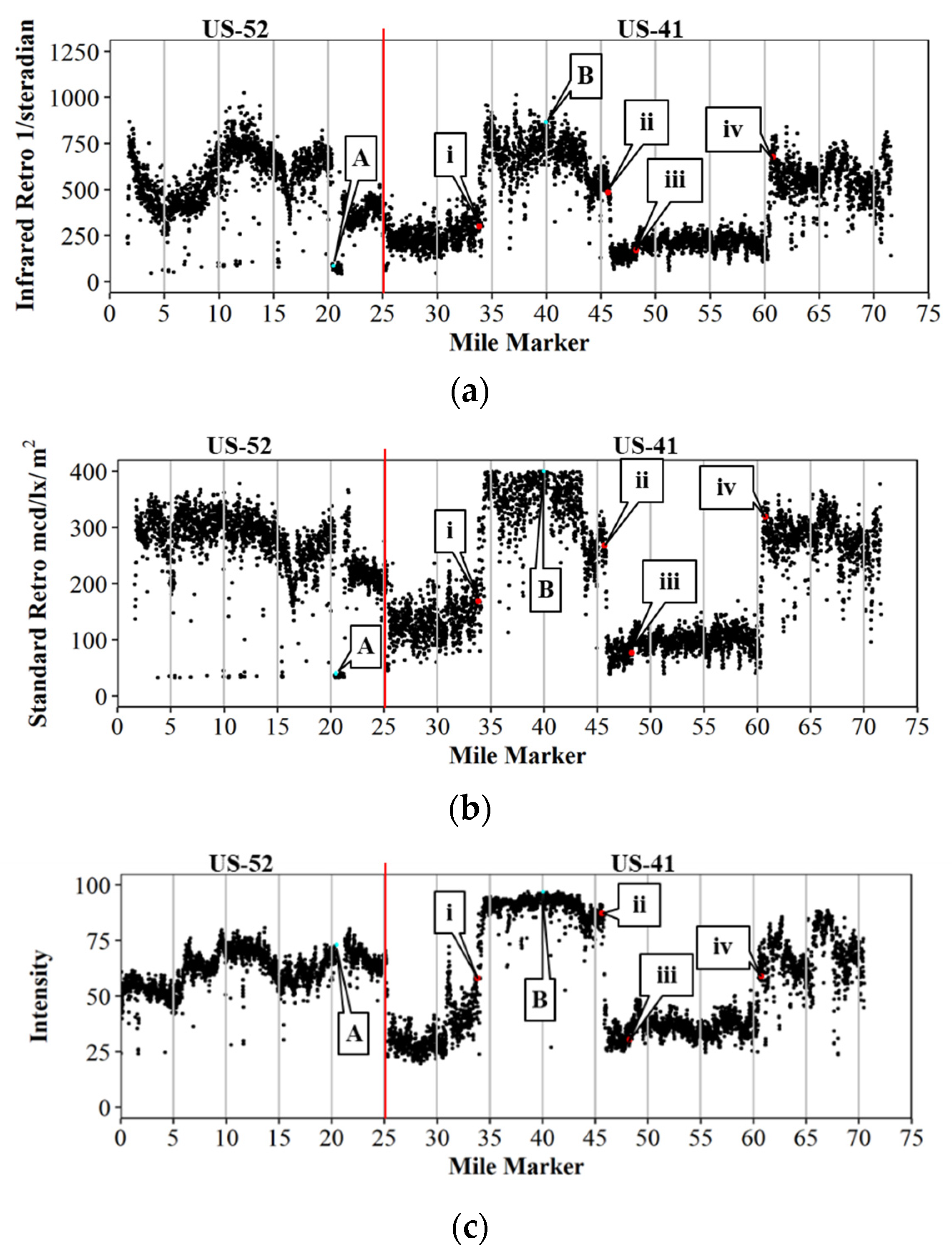
5.1. Qualitative Comparison
5.2. Correlation between Retrorefelctity and LiDAR Intensity
6. Conclusions and Recommendations for Future Research
6.1. Additional Data Collection Opportunities with LiDAR
6.2. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hawkins, N. Use of Transportation Asset Management Principles in State Highway Agencies; Transportation Research Board: Washington, DC, USA, 2013; Volume 439. [Google Scholar] [CrossRef]
- Zehr, S.; Hardin, B.; Lowther, H.; Plattner, D.; Wells, T.; Habib, A.; Bullock, D.M. Rumble Stripes and Pavement Marking Delineation; Department of Transportation; Intelligent Transportation: West Lafayette, IN, USA, 2020. [Google Scholar] [CrossRef]
- ASTM D7585/D7585M—10(2015)—Standard Practice for Evaluating Retroreflective. Available online: https://www.astm.org/Standards/D7585.htm (accessed on 8 November 2020).
- ASTM E1710—18 Pavement Markings Using Portable Hand-Operated Instruments. Available online: https://www.astm.org/Standards/E1710.htm (accessed on 8 November 2020).
- Mahlberg, J.A.; Sakhare, R.S.; Li, H.; Mathew, J.K.; Bullock, D.M.; Surnilla, G.C. Prioritizing Roadway Pavement Marking Maintenance Using Lane Keep Assist Sensor Data. Sensors 2021, 21, 6014. [Google Scholar] [CrossRef] [PubMed]
- Bahar, G.; Masliah, M.; Erwin, T.; Tan, E.; Hauer, E. Pavement Marking Materials and Markers: Real-World Relationship between Retroreflectivity and Safety over Time; Publication FHWA-SA-07-015; FHWA, U.S. Department of Transportation: Washington, DC, USA, 2006.
- Smadi, O.; Souleyrette, R.R.; Ormand, D.J.; Hawkins, N. Pavement Marking Retroreflectivity: Analysis of Safety Effectiveness; Transportation Research Record: Washington, DC, USA, 2008; Volume 2056, pp. 17–24. [Google Scholar]
- Donnell, E.T.; Karwa, V.; Sathyanarayanan, S. Analysis of Effects of Pavement Marking Retroreflectivity on Traffic Crash Frequency on Highways in North Carolina: Application of Artificial Neural Networks and Generalized Estimating Equations; Transportation Research Record: Washington, DC, USA, 2009; Volume 2103, pp. 50–60. [Google Scholar]
- Carlson, P.J.; Park, E.S.; Kang, D.H. Investigation of Longitudinal Pavement Marking Retroreflectivity and Safety. Transp. Res. Rec. J. Transp. Res. Board 2013, 2337, 59–66. [Google Scholar] [CrossRef]
- Olsen, M.J. Guidelines for the Use of Mobile LIDAR in Transportation Applications; Transportation Research Board: Washington, DC, USA, 2013; Volume 748. [Google Scholar]
- Filgueira, A.; González-Jorge, H.; Lagüela, S.; Vilariño, L.D.; Arias, P. Quantifying the influence of rain in LiDAR performance. Measurement 2017, 95, 143–148. [Google Scholar] [CrossRef]
- Goodin, C.; Carruth, D.; Doude, M.; Hudson, C. Predicting the Influence of Rain on LIDAR in ADAS. Electronics 2019, 8, 89. [Google Scholar] [CrossRef] [Green Version]
- Che, E.; Olsen, M.J.; Parrish, C.E.; Jung, J. Pavement Marking Retroreflectivity Estimation and Evaluation using Mobile Lidar Data. Photogramm. Eng. Remote Sens. 2019, 85, 573–583. [Google Scholar] [CrossRef]
- Chen, X.; Kohlmeyer, B.; Stroila, M.; Alwar, N. Next Generation Map Making: Geo-Referenced Ground-Level LIDAR Point Clouds for Automatic Retro-Reflective Road Feature Extraction. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; ACM: New York, NY, USA, 2009. [Google Scholar]
- Haiyan, G.; Jonathan, L.; Yongtao, Y.; Cheng, W.; Michael, C.; Bisheng, Y. Using mobile laser scanning data for automated extraction of road markings. ISPRS J. Photogramm. Remote Sens. 2014, 87, 93–107. [Google Scholar]
- Vosselman, G. Advanced Point Cloud Processing. In Photogrammetric Week’09; University of Stuttgart Stuttgart: Wichmann, Germany, 2009; pp. 137–146. [Google Scholar]
- Yu, Y.; Li, J.; Guan, H.; Jia, F.; Wang, C. Learning Hierarchical Features for Automated Extraction of Road Markings From 3-D Mobile LiDAR Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 709–726. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Patel, A.; Wen, C.; Bullock, D.; Habib, A. Intensity Thresholding and Deep Learning Based Lane Marking Extraction and Lane Width Estimation from Mobile Light Detection and Ranging (LiDAR) Point Clouds. Remote Sens. 2020, 12, 1379. [Google Scholar] [CrossRef]
- Ravi, R.; Cheng, Y.; Lin, Y.; Lin, Y.; Hasheminasab, S.M.; Zhou, T.; Flatt, J.E.; Habib, A. Lane Width Estimation in Work Zones Using LiDAR-Based Mobile Mapping Systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 5189–5212. [Google Scholar] [CrossRef]
- Ravi, R.; Bullock, D.; Habib, A. Pavement Distress and Debris Detection using a Mobile Mapping System with 2D Profiler LiDAR. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 428–438. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Medioni, G.; Lee, M.-S.; Tang, C.-K. A Computational Framework for Segmentation and Grouping; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar] [CrossRef]
- Jensen, J.R. Introductory Digital Image Processing: A Remote Sensing Perspective, 3rd ed.; Prentice Hall Series in Geographic Information Science; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005; ISBN 0-13-145361-0. [Google Scholar]
- Levinson, J.; Thrun, S. (Eds.) Robust Vehicle Localization in Urban Environments Using Probabilistic Maps. In Proceedings of the IEEE International Conference on Robotics & Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Patel, A.; Cheng, Y.; Ravi, R.; Lin, Y.; Bullock, D.; Habib, A. Transfer Learning for LiDAR-Based Lane Marking Detection and Intensity Profile Generation. Geomatics 2021, 1, 287–309. [Google Scholar] [CrossRef]
- Stal, C.; Tack, F.; de Maeyer, P.; de Wulf, A. Airborne photogrammetry and lidar for DSM extraction and 3D change detection over an urban area—A comparative study. Int. J. Remote Sens. 2013, 34, 1087–1110. [Google Scholar] [CrossRef] [Green Version]
- Balsa-Barreiro, J.; Fritsch, D. Generation of visually aesthetic and detailed 3D models of historical cities by using laser scanning and digital photogrammetry. Digit. Appl. Archaeol. Cult. Herit. 2018, 8, 57–64. [Google Scholar] [CrossRef]
- Owda, A.; Balsa-Barreiro, J.; Fritsch, D. Methodology for digital preservation of the cultural and patrimonial heritage: Generation of a 3D model of the Church St. Peter and Paul (Calw, Germany) by using laser scanning and digital photogrammetry. Sens. Rev. 2018, 38, 282–288. [Google Scholar] [CrossRef]
- Shin, Y.H.; Lee, D.-C. True Orthoimage Generation Using Airborne LiDAR Data with Generative Adversarial Network-Based Deep Learning Model. J. Sens. 2021, 2021, 1–25. [Google Scholar] [CrossRef]
- Mok, S.-C.; Kim, G.-W. Simulated Intensity Rendering of 3D LiDAR using Generative Adversarial Network. In Proceedings of the 2021 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju Island, Korea, 17–20 January 2021. [Google Scholar]
- Ravi, R.; Lin, Y.; Elbahnasawy, M.; Shamseldin, T.; Habib, A. Simultaneous system calibration of a multi-lidar multicamera mobile mapping platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1694–1714. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. KDD 1996, 96, 226–231. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Location and Comparisons | R2 | Pearson Correlation Coefficient | p-Value |
|---|---|---|---|
| US-52 & US-41 Standard Retroreflectivity vs. LiDAR Intensity Center Skip Line | 0.50 | 0.72 | 0.000 |
| US-41 Standard Retroreflectivity vs. LiDAR Intensity Center Skip Line | 0.63 | 0.80 | 0.000 |
| US-52 & US-41 Standard Retroreflectivity vs. LiDAR Intensity Right Edge Line | 0.75 | 0.86 | 0.000 |
| US-41 Standard Retroreflectivity vs. LiDAR Intensity Right Edge Line | 0.87 | 0.93 | 0.000 |
| US-52 & US-41 Infrared Retroreflectivity vs. LiDAR Intensity Center Skip Line | 0.54 | 0.73 | 0.000 |
| US-41 Infrared Retroreflectivity vs. LiDAR Intensity Center Skip Line | 0.66 | 0.81 | 0.000 |
| US-52 & US-41 Infrared Retroreflectivity vs. LiDAR Intensity Right Edge Line | 0.69 | 0.83 | 0.000 |
| US-41 Infrared Retroreflectivity vs. LiDAR Intensity Right Edge Line | 0.86 | 0.93 | 0.000 |
| US-52 & US-41 LiDAR Intensity Front Left vs. Rear Left | 0.95 | 0.98 | 0.000 |
| US-52 & US-41 LiDAR Intensity Rear Right vs. Front Right | 0.90 | 0.95 | 0.000 |
| US-52 & US-41 LiDAR Intensity Front Left vs. Front Right | 0.87 | 0.94 | 0.000 |
| US-52 & US-41 LiDAR Intensity Rear Left vs. Rear Right | 0.98 | 0.99 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahlberg, J.A.; Cheng, Y.-T.; Bullock, D.M.; Habib, A. Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings. Future Transp. 2021, 1, 720-736. https://doi.org/10.3390/futuretransp1030039
Mahlberg JA, Cheng Y-T, Bullock DM, Habib A. Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings. Future Transportation. 2021; 1(3):720-736. https://doi.org/10.3390/futuretransp1030039
Chicago/Turabian StyleMahlberg, Justin A., Yi-Ting Cheng, Darcy M. Bullock, and Ayman Habib. 2021. "Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings" Future Transportation 1, no. 3: 720-736. https://doi.org/10.3390/futuretransp1030039
APA StyleMahlberg, J. A., Cheng, Y.-T., Bullock, D. M., & Habib, A. (2021). Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings. Future Transportation, 1(3), 720-736. https://doi.org/10.3390/futuretransp1030039