1. Introduction
The move towards sustainable and livable cities has become urgent and is needed to ensure a better future for the next generation. One main issue in urban cities is street traffic. Policymakers, researchers, and companies are all investigating novel ways and solutions to make the city a better place for living, with less pollution, less congestion, and fewer accidents. Recently, the research has introduced the use of shared autonomous cars to reduce resources, energy consumption, and urban parking space [
1,
2]. The overarching promise is to provide the user with an on-demand, door-to-door trip enabling a new level of individual mobility. However, this idea is challenged by some recent studies demonstrating that such mobility services increase the mileage traveled in urban agglomerations and subsequently increase congestion and energy consumption [
3,
4]. Hence, fleets of autonomous cars, which are neither in private use nor in shared operation, would contribute to the sustainability or livability of a city. As Millard-Ball [
5] points out, autonomous cars could even foster a move backwards in the direction of car-friendly cities, with strong street separations between cars and active modes of transport.
Most recent concepts of sustainable cities such as the human scale [
6] or the 15 min city [
7], in accordance with the New Urban Agenda [
8], clearly show that the emphasis in urban planning is on calming streets, reducing the need for cars, promoting walking and biking, and enabling everyday activities such as meeting people, chatting, gardening, playing etc., to regularly occur on the streets. In this context, a solution was suggested to enhance the city’s sustainability, which consists of using a shared, autonomous cargo-bike fleet. Self-driving cargo bikes offer on-demand, door-to-door mobility through autonomous driving to the point of demand and can be also used for the first and last mile of public transportation (PT). This encourages people to cycle and pushes them to shift from cars to PT. They also improve the livability and sustainability of the city compared to shared autonomous vehicles (SAVs), as explained in Assmann et al. [
9]. Indeed, shared autonomous cargo bikes allow for a reduction in street traffic through the use of cycling paths, as well as the space needed for parking, as bikes are generally smaller in size. In addition, autonomous bikes have the advantage that they can be driven manually when used by a passenger (the bike is powered through pedaling), contrary to SAVs, which are 100% based on autonomous driving. The manual drive allows for an important reduction in energy consumption, as long rides are defined as when a customer is using the bike. Furthermore, the cargo bike has the advantage of offering a storage space that allows for further substitutions of trips that would normally require a car (e.g., shopping, smaller transport). At present, cargo-bike sharing has shown a strong potential to reduce motorized traffic in a city [
10,
11]. In contrast to conventional bike-sharing, it enables the transport of errands, kids, equipment, and others. Therefore, it widens the scope of bike-sharing and enables a much higher substitution of motorized trips. Different companies and researchers have concentrated on the development of autonomous micro-vehicles and robots that can drive on sidewalks (and, subsequently, on mixed-used streets) and can be used for urban delivery [
12]. These technologies have already been adopted for bikes, as Baum et al. [
13] points out. In order to utilize the potential of cargo bike-sharing, it makes sense to integrate autonomous driving functionalities. This would enable the same on-demand, door-to-door service standards, utilize the potential to substitute car traffic, and widen the scope of conventional bike-sharing.
In this paper, we aim to study the use of autonomous bikes as a means of on-demand, shared-use, self-driving bikes services (OSABS). This system is currently under development by the authors and a research team at the University of Magdeburg [
14]. It is based on the use of a three-wheeled electric cargo-bikes to ensure a good balance with the autonomous driving mode. The bike can be also used as an e-assisted bike in a manual mode.
Figure 1 illustrates the basic concept of OSABS. A customer can request a bike via smartphone. The operation management (OM) center will choose a suitable bike (if available) for the customer’s request. The bike will autonomously ride to the point of demand within a given service time. The customer unlocks the bike and manually rides it to the desired destination. When they have arrived, the customer leaves the bike, and the OM center will decide on the next destination. The bike can drive autonomously to the next customer, a waiting station (to park close to future demands), or a charging station (for battery charging). The choice of the next task depends on the fleet management algorithms that were implemented. An optimized fleet management strategy allows for efficient coordination between demand and the bike fleet. It forms the necessary basis for a holistic evaluation of whether the concept of OSABS is economically viable in contrast with conventional bike-sharing and shared autonomous car fleets.
The aim of this work is to investigate fleet management strategies to find the best balance between customer satisfaction and cost reduction for OSABS. On the one hand, customers want quick and reliable access to bikes, which can result in a large fleet and frequent rebalancing. On the other hand, fleet operators are interested in the economic viability of their service, and consequently aim to reduce energy (mainly from idle traveling) and fleet costs as much as possible. Finding a favorable balance for both parties allows for the sustainable use of the service. To achieve this, we consider three different rebalancing strategies, paying particular attention to the tradeoffs facing fleet owners. Since OSABS is an entirely new system and there is no empirical data to evaluate the system, we chose the simulation study as our methodology to understand the operational insights of the system. Moreover, the simulation study provides fundamental knowledge about the interaction of various elements, improving and optimizing the architecture of complex systems. Therefore, to examine and evaluate the strategies on a meaningful scale, we implement them in an agent-based simulation model.
The remainder of this paper is organized as follows. In
Section 2, we review a collection of the relevant publications on vehicle relocation problems.
Section 3 describes the simulation environment and the developed relocation strategies. In
Section 4, we present the results of the different tested scenarios.
Section 5 discusses the simulation outcomes.
Section 6 concludes by highlighting key findings and future research initiatives.
3. Simulation Setup
This section describes the simulation environment in which our developed fleet management strategies will be evaluated.
3.1. Demand Generation
Fleet management strategies for autonomous fleets are generally evaluated in simplified graphs. Thus, their transferability to possible real-world applications is limited, due to a lack of realism in the routing and demand input. We aim to overcome this by basing our simulation on a real-world city with its original street network. The city of choice for our evaluations is the city of Magdeburg, Germany. This is a medium-sized city which, on the one hand, is big enough to represent the different urban forms of a city. On the other hand, it is not too large, keeping computing efforts on a reasonable scale. We will simulate OSABS in this operational area. For this purpose, we need to define the demand for trips with autonomous cargo bikes.
Several approaches in the literature provide a framework for the creation of demand scenarios for conventional bike-sharing systems. According to [
44], these models can be grouped into two main categories: demand rebalancing and demand forecasting models. The latter can be further divided into city-level (e.g., [
45]), cluster-level (e.g., [
46]), and station-level (e.g., [
47]) demand prediction models [
48]. However, a major proportion of these models uses the existing data of already-implemented conventional bike-sharing systems to predict demand in the given system. There are approaches to introduce bike-sharing systems in cities where such systems do not yet exist [
49,
50]. Still, OSABS include some particularities, making it difficult to compare them with existing systems.
Therefore, we developed an approach to determine the demand for the new mobility concept in a temporally and spatially disaggregated manner. We then applied this to the city of Magdeburg. In the first step, a survey of mobility needs is conducted and evaluated concerning the city-wide usage potential of autonomous cargo bikes. The potential is calculated as usage likelihood, expressed as a modal split for the entire city. In our case, the survey is for the city of Magdeburg and provided us with the probability that road users replace each conventional mode of transport (cars, foot, bike, public transport) with OSABS. In addition, the survey was used to determine the distance that respondents would be willing to travel with an autonomous cargo bike.
Secondly, the resulting usage likelihood is spatially disaggregated. For spatial disaggregation, we used existing traffic data from well-established and widely used traffic demand models. According to [
51], cross-section counts were carried out to determine the composition and distribution of traffic volumes. This involves recording the vehicles or people that pass through a specific area during a defined survey period. To ensure a representative representation of the traffic situation, such surveys were carried out on specific survey days: Tuesday and Thursday. The other days were unsuitable because there are comparatively high traffic volumes (Monday and Friday) or some service areas are closed in the afternoon or all day (Wednesday, Saturday, and Sunday) (see [
51]). These survey days are also referred to as normal working days or statistical traffic days. For our purpose, the traffic data were provided by the municipality of Magdeburg. The data were available in the form of origin–destination pairs (OD pairs) for four different modes of transport per statistical traffic day. The OD pairs describe both the traffic flow between the individual zones (interzonal flow) and the traffic flow within the respective traffic zone (intrazonal flow). In our case, those are statistical zones of approx. 80,000 inhabitants. We used the modal split and stated distance limits to calculate the OSABS demand of each OD pair. Thus, we can calculate the traffic volumes of autonomous cargo bikes between all zones for one statistical day.
In our third step, the resulting demand between the OD pairs is temporally disaggregated. This was carried out to enable the prediction of usage per hour. For this purpose, we derived usage patterns from an existing conventional bike-sharing system in the city of Hamburg [
52]. Since OSABS are still operated with bikes, we assumed similar usage patterns and applied them to the new system. Therefore, we derived both daily and weekly profiles for the use of the conventional bike-sharing system to temporally disaggregate the demand of a statistical day to the demand per hour, and distribute this over a week.
The resulting hourly distribution of bookings for each day of the week is shown in
Appendix A (
Table A1). In addition to the time- and space-related influencing variables, seasonal effects were also taken into account when creating the demand for an entire year, since, according to [
53], these have a significant influence on the use of bike-sharing systems. For this purpose, we extended the usage data of the conventional system with weather data. These include hourly data on temperature, precipitation and wind speed, and can be retrieved from the open-data portal of the German Weather Service (
https://opendata.dwd.de/, accessed on 19 May 2021).
With the help of a regression analysis, we then determined the influence of the respective weather variables on the use of the bike-sharing system. Using these influencing factors and an arbitrary weather dataset, we could first model the influence of weather on daily or weekly OSABS demand. In addition, this allowed us to scale hourly demand between OD pairs as a function of the prevailing weather conditions over an arbitrarily long period of time. Thus, per OD pair, we could model the daily, weekly and yearly profile of OSABS demand, while the randomization of demand was possible through the application of different weather scenarios. The approach is summarized below in the form of a flowchart (
Figure 2).
An extract of the resulting demand for a statistical traffic day is shown in
Figure 3. The figure represents the hourly interzonal and intrazonal traffic flow between traffic zone 11 (city-center district with a high density of restaurants and pubs) and traffic zone 41 (university district). The upper bar chart describes the traffic flows starting from zone 15, while the lower chart describes the traffic flows starting from zone 41. In addition,
Appendix A (
Table A1) shows the hourly distribution of bookings for each day of the week.
3.2. Model Description
In order to understand the insights of the OSABS, we developed an agent-based simulation model using Anylogic based on our conceptual model presented in [
54]. The developed conceptual model represents the key elements of OSABS, which are: demand scenarios, order management, operational aspects (bikes and stations), and output indicators where we calculate the performance indicators. Vasu Dev et al. [
55] presented a detailed description of the simulation testbed for the OSABS. The process flow of the simulation model is as follows:
Demand generation: we generated the demand data as an origin–destination pair for each region. We fed these demand data as an input to the simulation model, which schedules the customer arrivals. The customer arrives at a random location in the origin region. Then, the customer generates the request for the autonomous cargo bike with the constraints of a 10-min waiting time.
Matching request: The matching algorithm receives the customer request and checks for available cargo bikes from the fleet near the customer location. It assigns the suitable cargo bike to the customer if available, based on the route calculation.
Route calculation: The routing algorithm generates the best possible bike route for the selected bike to the customer. Anylogic has an inbuilt routing engine that can provide an online route for the bike. However, we developed a custom route provider using the Graphhopper routing engine to provide autonomous routing and manual routing for our cargo bike. Graphhopper is an open-source java routing engine, which parses OpenStreetMap data and allows for caluclation of the shortest path algorithm between two points [
56]. Given two coordinations, GraphHoppers allows the best route for the chosen vehicle profile to be found, considering the chosen weight function. We developed two vehicle profiles, one for the autonomous mode and one for the manual mode, as the routes and the energy consumption differs between the two modes. For a reliable routing, we parsed the specific cycling paths our cargo bike can use using tGraphhopper, by avoiding footways, platforms, pedestrians, steps, and non-paved routes. We also defined the speed of the bike depending on the type of surface tag and highway tag in OSM. To calculate the best route, we implemented our own weighting function, which allows us to determine the route with less energy consumption.
Bike movement: The cargo bike drives autonomously to the assigned customer. As the customer has the destination region information, the customer drives manually to the random destination location using the manual routing mode.
Rebalancing: Once the customer reaches the destination, he or she drops the cargo bike. If there is a nearby request, then the bike moves directly to the next customer; otherwise, the chosen rebalancing strategy relocates the bike to the suitable waiting station.
Output indicators: As an output of the simulation, we collect a list of statistics including the number of customer requests, the number of customers served, service level, time utilization of the cargo bike with the customer and without the customer, energy consumption during autonomous driving and manual driving.
This case study focuses on the autonomous cargo-bike sharing system. We consider the inner city of Magdeburg as the operational area, which contains 14 zones, named regions. The area chosen for our simulation was selected based on the real traffic data provided by the municipality of Magdeburg. Since the operational area is located in the city center, there is a high traffic density in combination with the traffic distribution, favoring the use of alternative mobility concepts.
Table 1 shows both the distribution of the distances traveled and the shares of the respective means of transport depending on the distance. As can be seen, the share of trips covered on foot is the highest. However, with increasing distance, the shares of other modes of transport, especially motorized individual transport and public transport, significantly increase. This can be observed for trips with a distance of more than one kilometer, whose share is notably larger compared to trips with a distance of less than one kilometer.
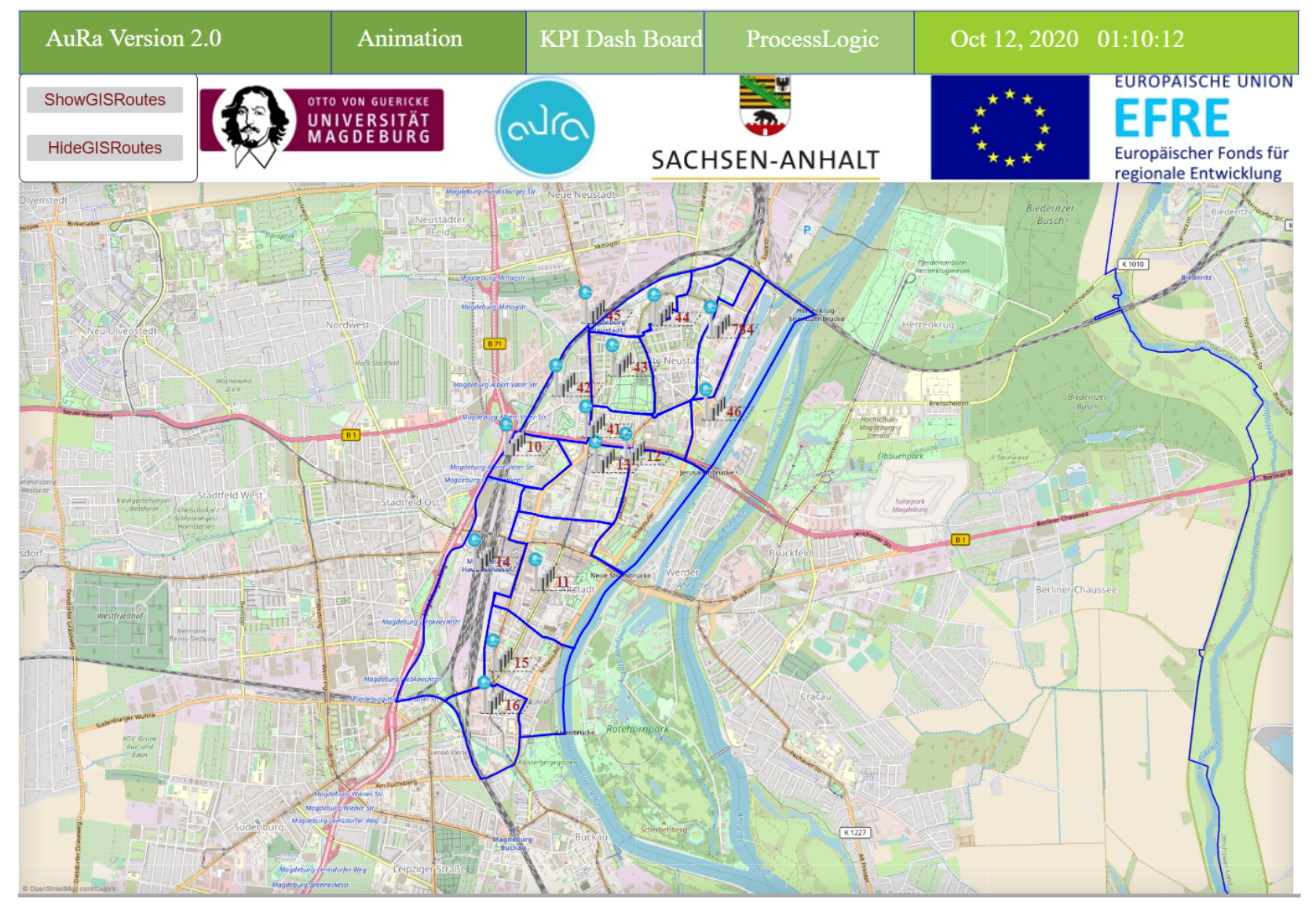
Anylogic provides an inbuilt Geographic Information System (GIS) map. We created the regions on the top layer of the GIS map using a shapefile obtained from Magdeburg’s traffic department.
Figure 4 shows the Graphical User Interface (GUI) of the simulation model, which visualizes the operational area, including cargo bikes, stations, and Key Performance Indicator (KPI) dashboard and process logic.
3.3. Fleet Management Strategies
Fleet management is a vital component in the efficiency of OSABS. It defines how bikes are assigned to the customer. We refer to this using the matching problem. It also allows for a redistribution of the bikes in the network to optimize the system. This is called the rebalancing (or relocation) problem. In this paper, we aim to test and evaluate different rebalancing strategies. The matching component will be the subject of further studies. For this work, we implemented a first-in-first-out (FIFO) strategy that assigns the best available bike in the 10-min area (in terms of the less energy-consuming route) to each customer. It is important to mention that we prioritize serving the current requests in the rebalancing operation. This means that, if a bike is on its way to a waiting station and a request appears in the surroundings, the bike could be assigned to this customer’s request, and the rebalancing operation cancelled. We do not consider open requests. If no available bike can reach the customer in less than 10 min, then the request is rejected.
For the rebalancing component, we distinguish between two types of relocation:
Relocation after rental: refers to the rebalancing operation applied when a bike becomes idle after serving a customer.
Periodic relocation: refers to the rebalancing operation which occurs each period T to distribute bikes between the different stations according to future demand.
Both types require the implementation of the following steps:
Stations distribution: We need to discretize the operating area into a set of rebalancing regions (cells) and locate a station in each region. In this work, we adopt the same discretization of statistical cells, for two reasons. First, because the demand scenarios are defined according to the statistical cells. The second reason is that each statistical cell can be covered in 10 min if we place a station in its center. Therefore, we have placed 14 stations (a station in the center of each region).
Demand estimation: Predicting upcoming demand has been recognized as an important task [
57]. However, as we aim to test different relocation strategies and are not interested in evaluating or developing novel forecasting methods, we assume that we know the mean of the demand distribution (generated according to poisson distribution). This assumption has no impact on our comparison study.
Imbalance calculation: For each relocation type, we have a specific imbalance calculation.
The imbalance for periodic relocation: For each region
i, at the period
T, we define the periodic imbalance
according to Equation (
1).
where:
The imbalance for relocation after rental: For each region
i, and for each period
T, we calculate the imbalance according to the Equation (
2).
where:
For each period T, T <= t < T + 1
: Number of bikes available at t in the region i. This value is updated each time a bike from the region i is assigned to a customer (We decrease the value by 1) or a bike is relocated to the station of region i (we increase the value by 1).
: Estimated number of bikes needed at t till the end of the current period T. The value of is updated continuously (it decreases when requests are appearing).
Bike relocation: we assign each idle bike to a station using imbalance calculation. We have defined three different rebalancing strategies and one reference case where no rebalancing strategy is applied:
No Relocation: this is the case where less idle mileage is traveled, where we do not consider the future demand. For the periodic relocation, no action is needed. However, for the relocation after rental, we move the bike to the waiting station of the customer destination region (bikes need to always be in a waiting station).
Relocation in the vicinity: for this strategy, bikes can move only to neighboring regions. For the periodic relocation, we relocate bikes from a region with oversupply to undersupplied regions in its vicinity only. The priority is given to the region with the highest deficit in the neighborhood. For relocation after rental, the bike should stay in the customer destination region if it has already a negative imbalance; otherwise, it moves to the region with the highest deficit in the vicinity, If no region has a deficit, the bike is assigned to the waiting station of the destination region.
Relocate to any undersupplied cell: in this case, we mainly relocate bikes based on the imbalance value. Each region with an undersupply can get bikes from any region with an oversupply (even if it is distant). However, this operation is optimized by selecting the nearest available bike to the undersupplied region. After the rental, the bike should stay in the customer destination region if it has already a negative imbalance. Otherwise, it goes to the region with the biggest deficit.
Mixed relocation: here, we combine the strategies “Relocation in the vicinity” and “relocation to any”. For cells with a significant undersupply (imbalance ≥ 5), relocation is possible from any cell. However, for cells with a moderate undersupply (imbalance < 5), only relocation from neighboring cells is allowed.
In total, we can create 16 scenarios from the combination of these rebalancing strategies. In this first study, we are interested in evaluating the following scenarios: no relocation, relocation to vicinity, relocation to any and mixed relocation. We apply the same strategy for both periodic relocation and relocation after rental.
5. Discussion
In this section, we discuss the presented outcomes and outline their limitations. First, this paper presents an approach to implement and compare different relocation strategies for AMoD services. This approach could easily be applied to other types of mobility where a proactive rebalancing operation is needed.
Second, it is important to analyze the simulation results with a holistic view of the different associated factors. Evidently, for fixed fleet size, the rebalancing operation leads to higher empty mileage traveled (and, consequently, higher energy consumption) in the system. However, as shown in the evaluation results, rebalancing allows us to significantly lower the number of bikes in the system (by over 15% for the same service level). The decrease in fleet size implies significant financial benefits thanks to the lower investments, maintenance costs and energy consumption. The amount of energy saved needs to be determined by life-cycle assessment in future work. These benefits might be even larger when we also consider the environmental advantages. A smaller fleet results in less street congestion and fewer parking spaces for waiting and charging stations.
Third, we believe that the cost analysis is not conclusive, as the costs may differ considerably from one city to another [
62] and strictly depend on the implemented system, the area, and the demand profiles [
63]. To the best of our knowledge, data for German cities are, unfortunately, not available in the literature. For OSABS, we estimate high operational costs compared to the conventional system. However, it can confer additional benefits by modifying the user’s behavior and enhancing the attractiveness of bike-sharing. As mentioned in [
63], we could have different bike-sharing systems in the same area for different target groups and with different business models. For example, the electrical bike-sharing system costs more than the traditional bike-sharing but makes the bike-sharing more attractive, and the increase in infrastructure could be compensated by a larger and more balanced demand [
60]. The same applies to OSABS, which is estimated to attract more users thanks to the system reactivity and the possibility of a door-to-door bike-sharing option. Indeed, OSABS not only can be considered as an alternative to cars for short trips but also can enhance the transition from cars to public transportation for mid-to-long trips. It facilitates the connection to public transport stations and can be used as a first- or last-mile mobility option. Furthermore, it would be worth comparing OSABS and AMoD services in terms of their external costs. As, for instance, Cavill et al. [
64], Gössling and Choi [
65], Koning and Conway [
66] point out, biking benefits an economy or society through better health and other factors. Cars, however, impose costs on a society through air pollution, health issues and accidents. Although OSABS may not be viable from an operator perspective, they are likely to beneficial from a public perspective. However, this needs more investigation and sound assessments of the external costs of OSABS and AMoDs.
Fourth, we should highlight that we ran the experiments for only two demand scenarios in the inner city of Magdeburg. Thus, the results must be interpreted considering the context of the study area and the demand patterns. We simulated the system for a dense and small area, where the bike can move from one region to another in 2–3 min and the demand is mainly concentrated in the central region. In this setting, the relocation to a vicinity strategy has proven to be the most efficient in terms of service level and energy consumption. However, if we consider a larger area, where we have distant clusters of demand, a different strategy could perform better. For example, including the outer city areas in our study would stress the importance of rebalancing to meet customer demands in the suburbs. Indeed, in the morning peak hour, the demand is in the inner city, where we will have a lot of bikes; however, if we need more bikes in the outer city, there is no supply. In this case, the rebalancing “To vicinity” may lead to poor performances as the outer city is distant from the inner-city regions, and thus cannot follow the demand pattern. However, the strategy “To any” and “mixed” may perform better and ensure a good service level. Certainly, the rebalancing distance will increase, but we will satisfy more customers and the manual km (the kilometers driven by the customer, which is a source of revenue for our service) will also increase. A dynamic pricing strategy could be tested and studied for this scenario, in which we propose a higher price for the outer regions, as we need a larger rebalancing effort to satisfy demand. This case also emphasizes the need for OSABS, as bikes can move autonomously and dynamically according to the upcoming demand, unlike conventional bike-sharing systems, which are currently not viable for such regions. The evaluation of relocation strategies with different cities and case studies will be the subject of future research.
Fifth, in this work, we ignored the need for the bikes to charge their batteries. As has been studied by Chen et al. [
36], the choice of the charging policy and vehicle range has a major impact on the system performance. Thus, an advanced model with battery and charging integration is under development. The next work will aim to optimize charging and fleet management jointly.
Finally, the demand information used in the rebalancing algorithm is the same as the one integrated into the demand generation module, which is not the case in the real world. A sophisticated forecasting algorithm for rebalancing should be implemented and tested in order to present a more realistic model. A deep learning-based approach could be used to predict demand location and time [
67], and the rebalancing algorithm assigns bikes accordingly. Further work could also be done to optimize rebalancing by forecasting the customer destination.
6. Conclusions
Through this work, we investigate and provide a better knowledge of a novel mobility service: OSABS. We address the problem of fleet relocation. Our aim is to optimize fleet management for this new service by increasing its efficiency and reducing investment costs, which are relatively high for a self-driving system. The simulation of our case study with three different strategies for periodic rebalancing and after rental rebalancing allows us to quantify the impact of each one on the service level and in terms of resource use, compared to a reference case of “no rebalancing”. Among the three proactive rebalancing strategies, redistributing bikes within the vicinity of the current region achieves the best performance, with low energy consumption, low mileage traveled, and a high service level. In contrast, strategies aiming to relocate bikes more often lead to lower performances in terms of the resources used, with no advantage in the service level. These findings were also strengthened by the cost analysis, where the “to vicinity” strategy achieved the smallest cost per trip for a given service level.
This study affirms the rebalancing’s potential in the improvement of service efficiency and reduction in fleet size. In addition, it contributes to the field of SAV fleet management research by extending the scope of existing studies to other mobility services, such as autonomous bikes or micro-vehicles, with more realism. This study allowed us to draw some conclusions for OSABS regarding the most suitable rebalancing strategy. However, the simulated model is very simplified and could be extended further. We can add more complexity by considering in-advance booking, a heterogeneous fleet, or dynamic prices. Furthermore, in this research, we considered OSABS independently from other mobility services. With this limitation, we miss the potential gains that may arise through integrating our service with public transportation. A future research direction consists of the evaluation of OSABS for more complex deployment options, such as a multi-modal transportation service or a last-mile solution.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















