
Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization


Abstract
1. Introduction
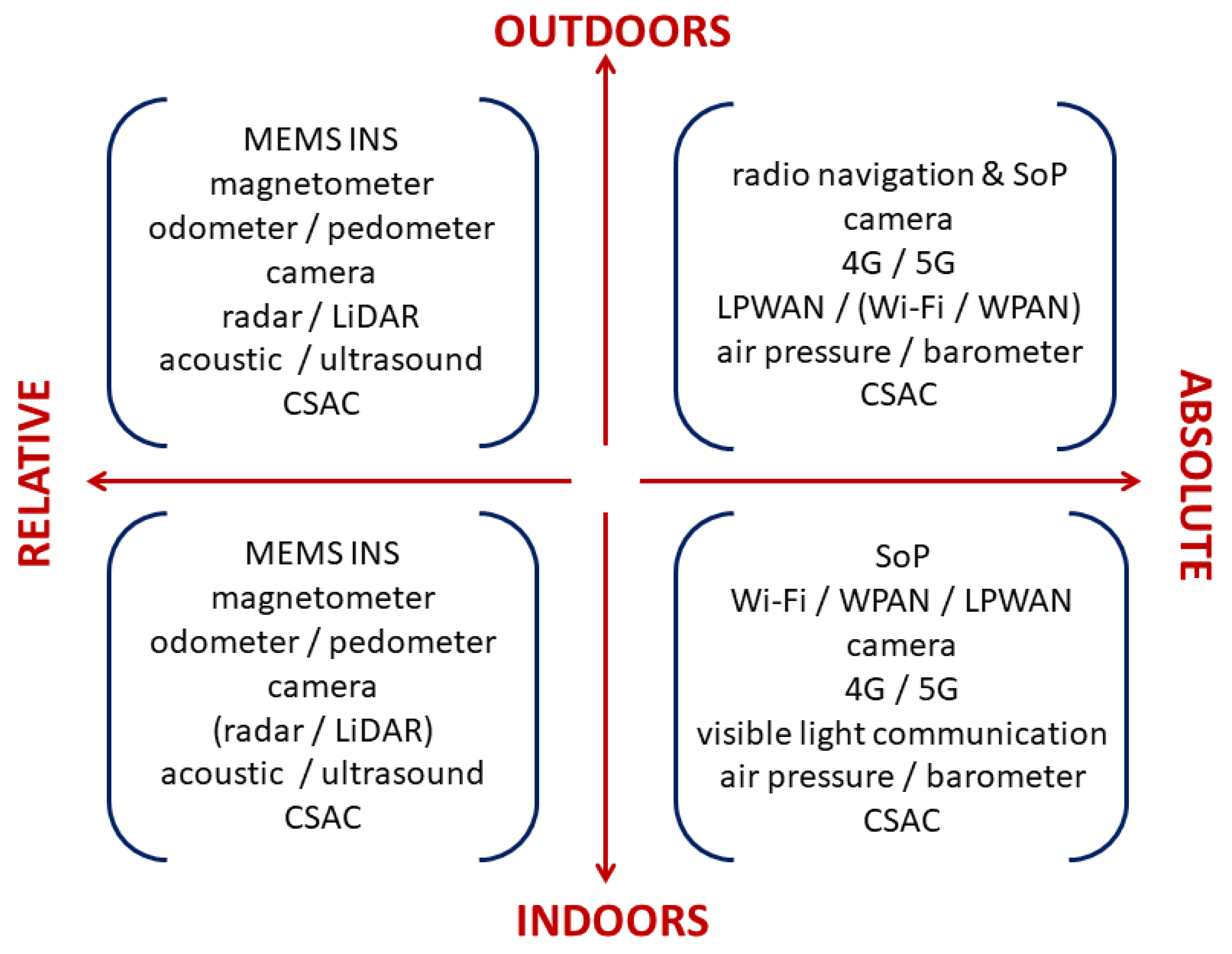
Indoor positioning is defined as any system which attempts to provide an accurate positioning inside of a covered structure using radio waves, acoustic signals, or other sensory information collected by mobile devices. It is primarily used for real-time location of people or objects in large buildings and in closed areas/spaces. Several types of location-sensing systems exist in which each have its own strengths and limitations.
2. User Requirements
2.1. Key Performance Parameters
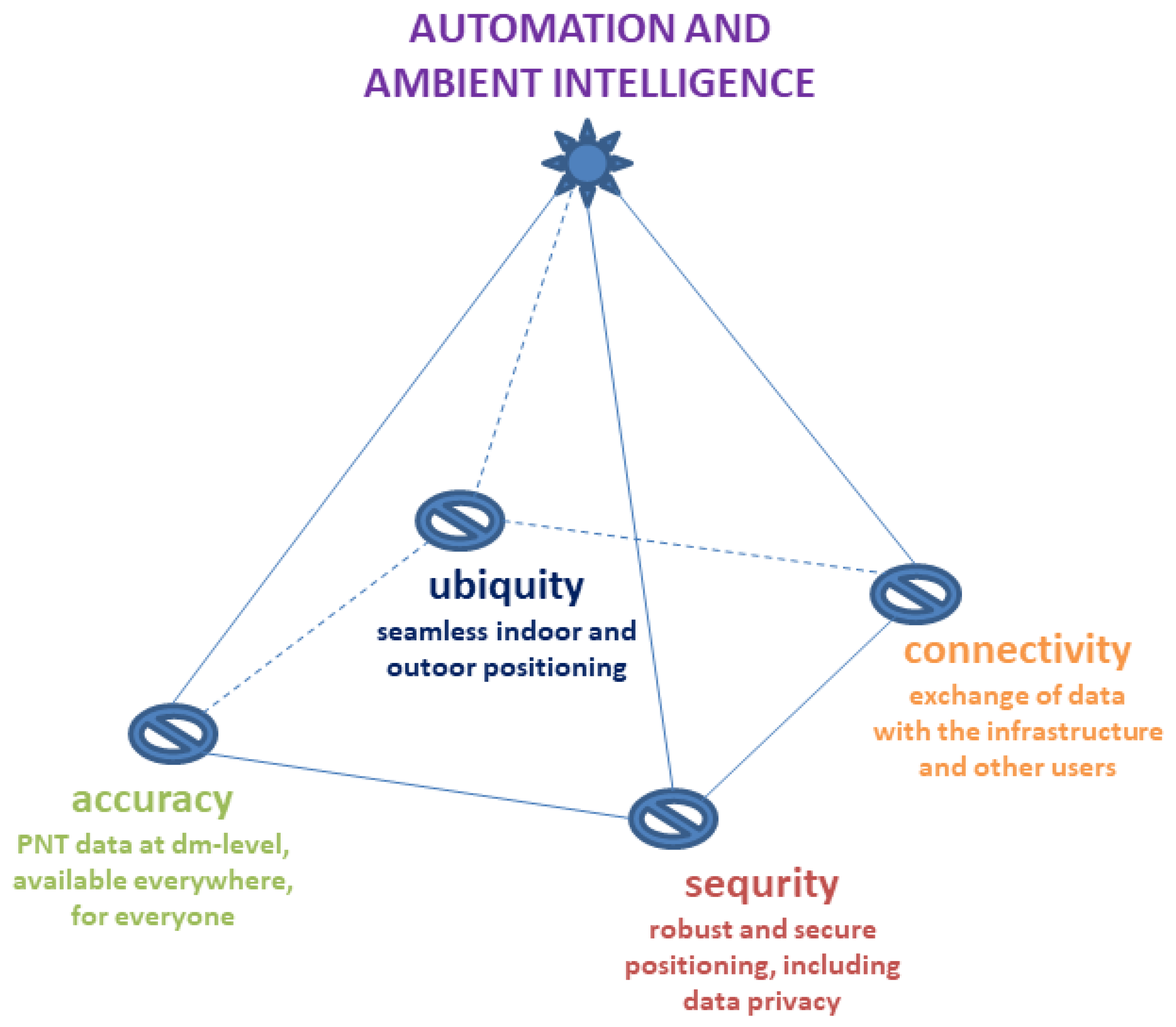
- Accuracy is obtained thanks to multi constellation, multi-frequency GNSS, augmented by PPP-RTK (Precise Point Positioning – Real Time Kinematic) services and hybridized with INS and other sensors;
- Connectivity relies on the integration with both satellites and terrestrial networks, such as the mobile 5G networks, LEO (Low Earth Orbit) satellites or LPWANs (Low Power Wide Area Networks);
- Ubiquity is provided by complementary positioning technologies and sensors; and
- Security is provided by the combination of independent redundant technologies, cybersecurity and authentication.
2.2. Positioning Requirements
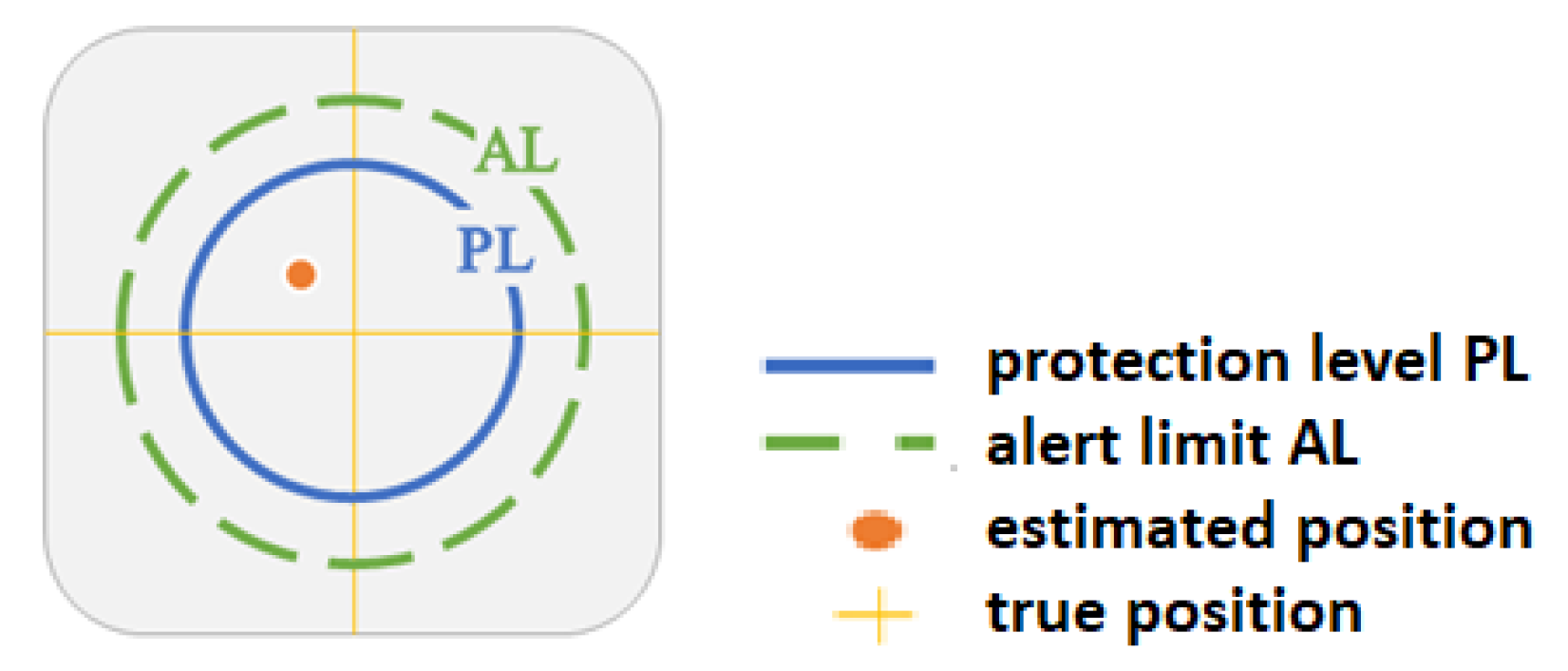
2.3. The Key Parameter Integrity
- Integrity monitoring is the ability of a system to provide timely warnings to users when the system should not be used for navigation [26]; and
- Position integrity is the general performance feature referring to the level of trust a user can have in the value of a given position or velocity as provided by a location system [22].
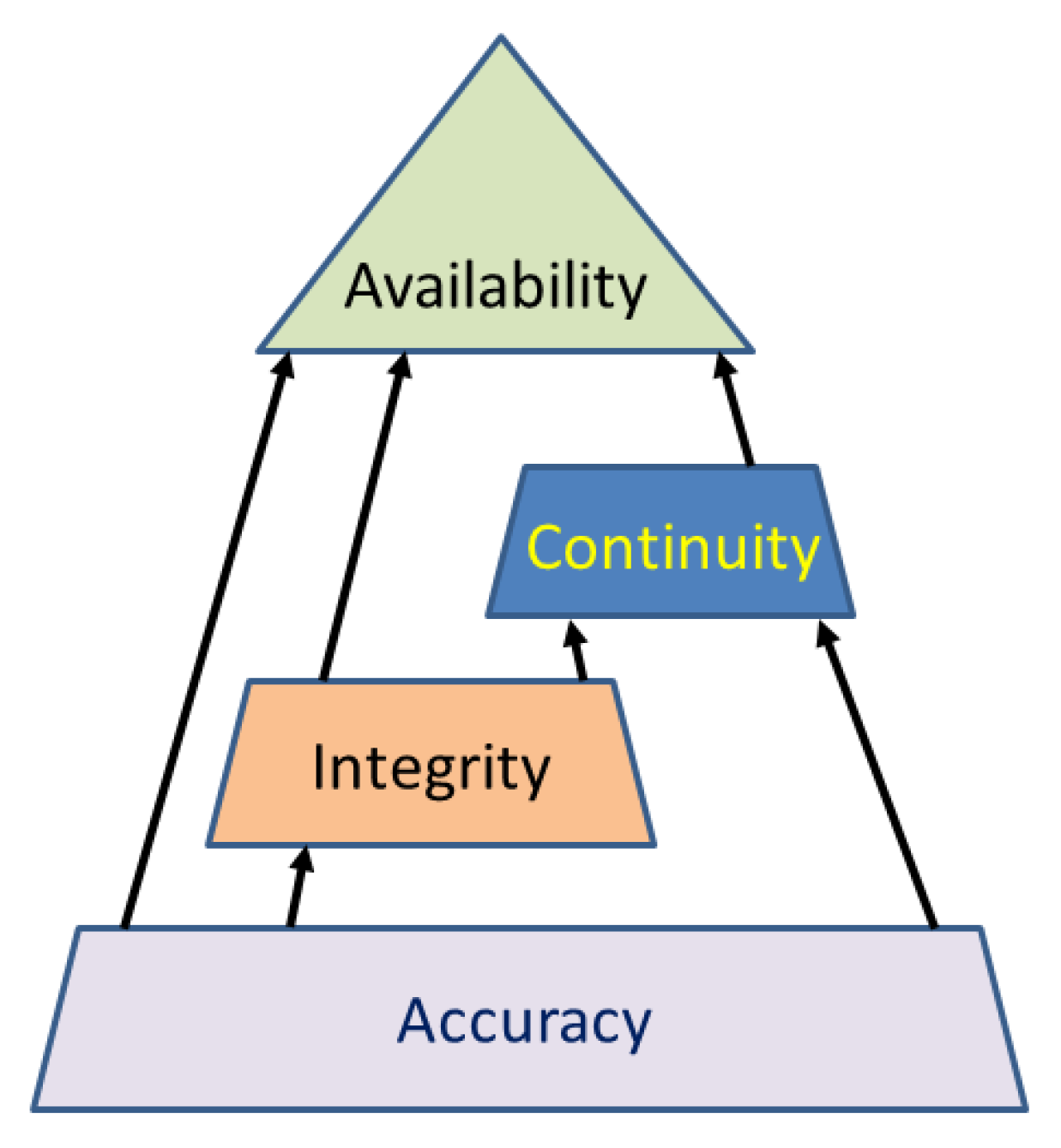
2.4. Relationship between Key Parameters
3. Localization Topologies and Methods
3.1. Cell-Based Positioning
3.2. Lateration
3.3. Hyperbolic Lateration
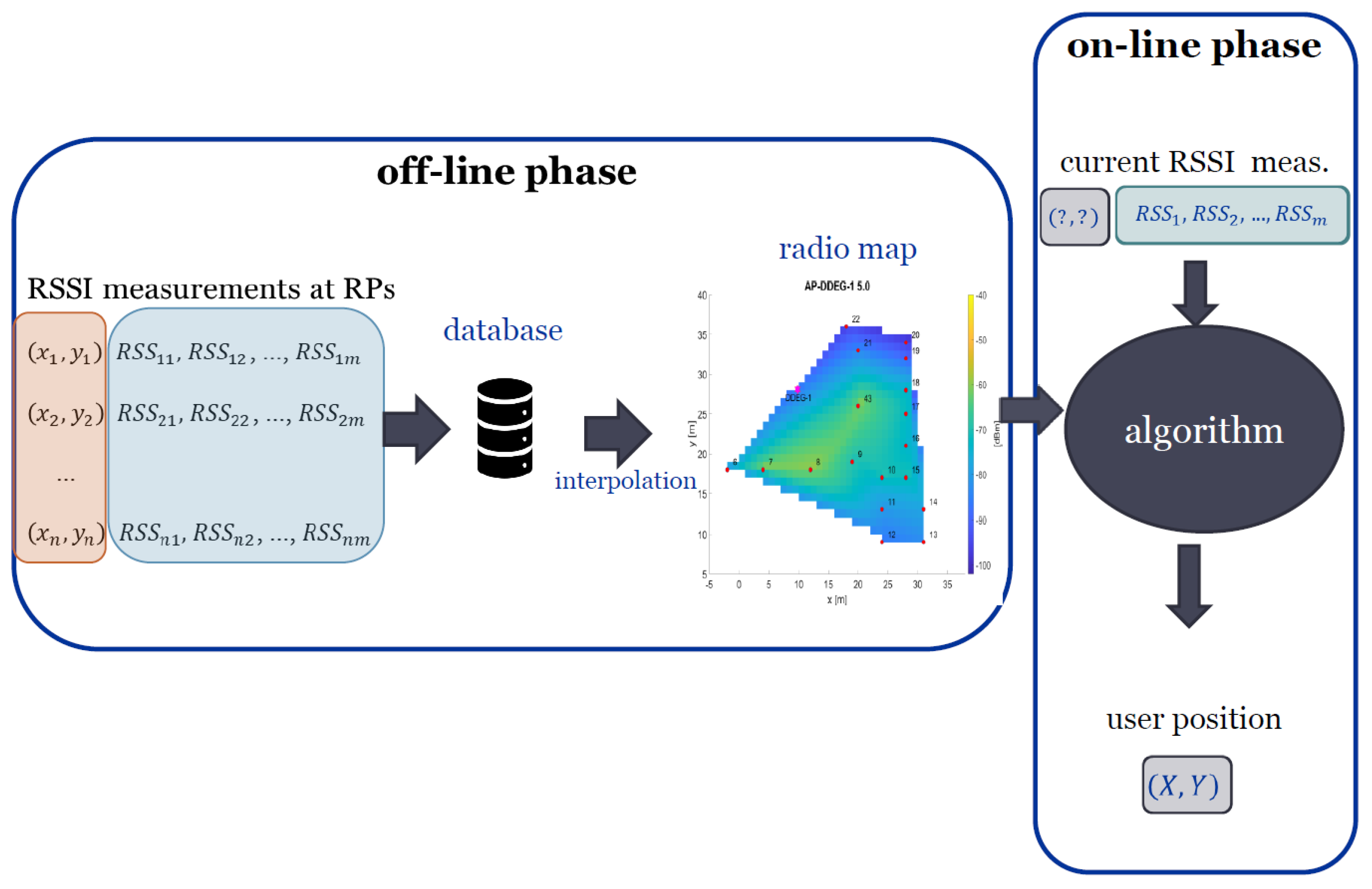
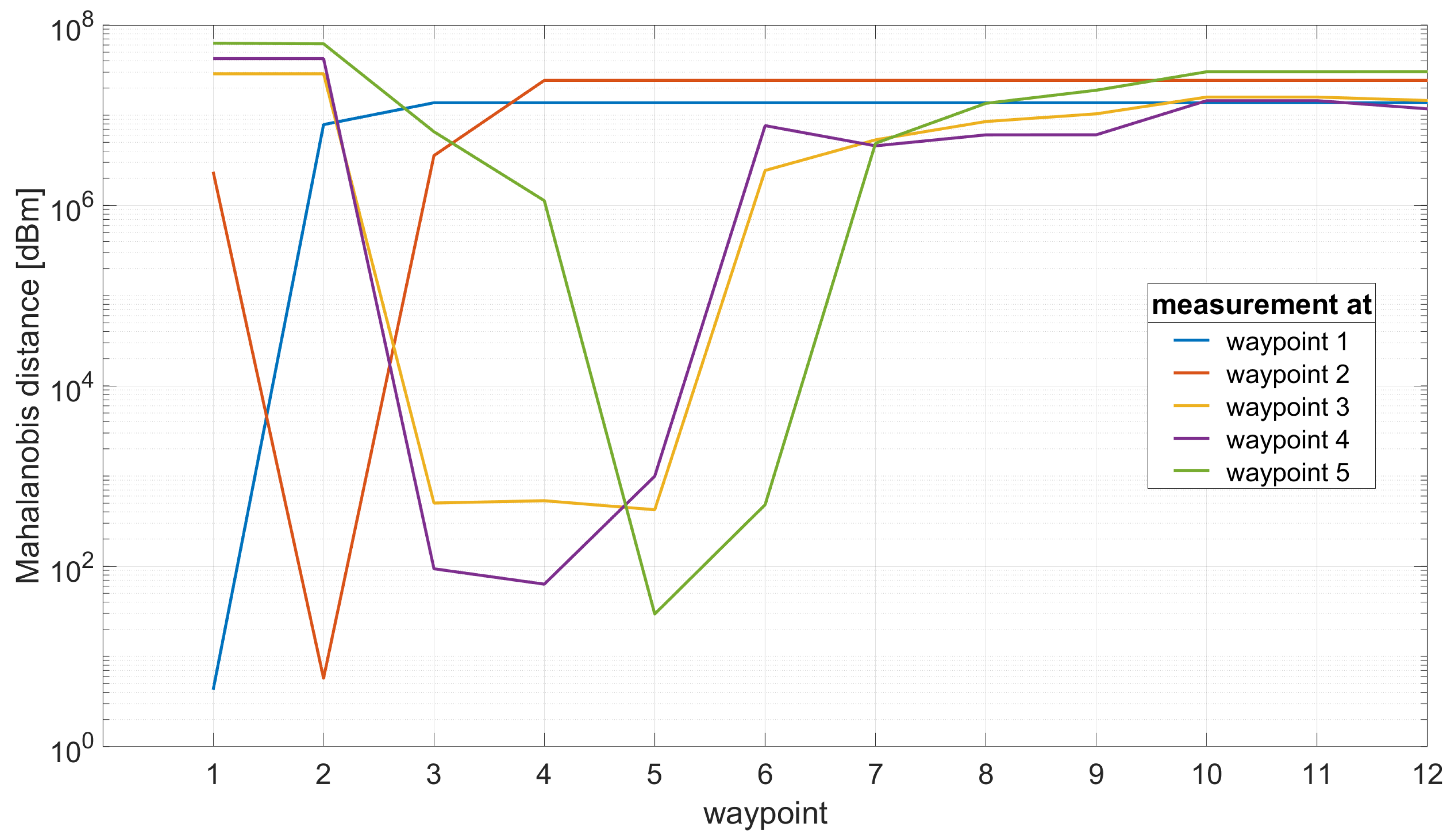
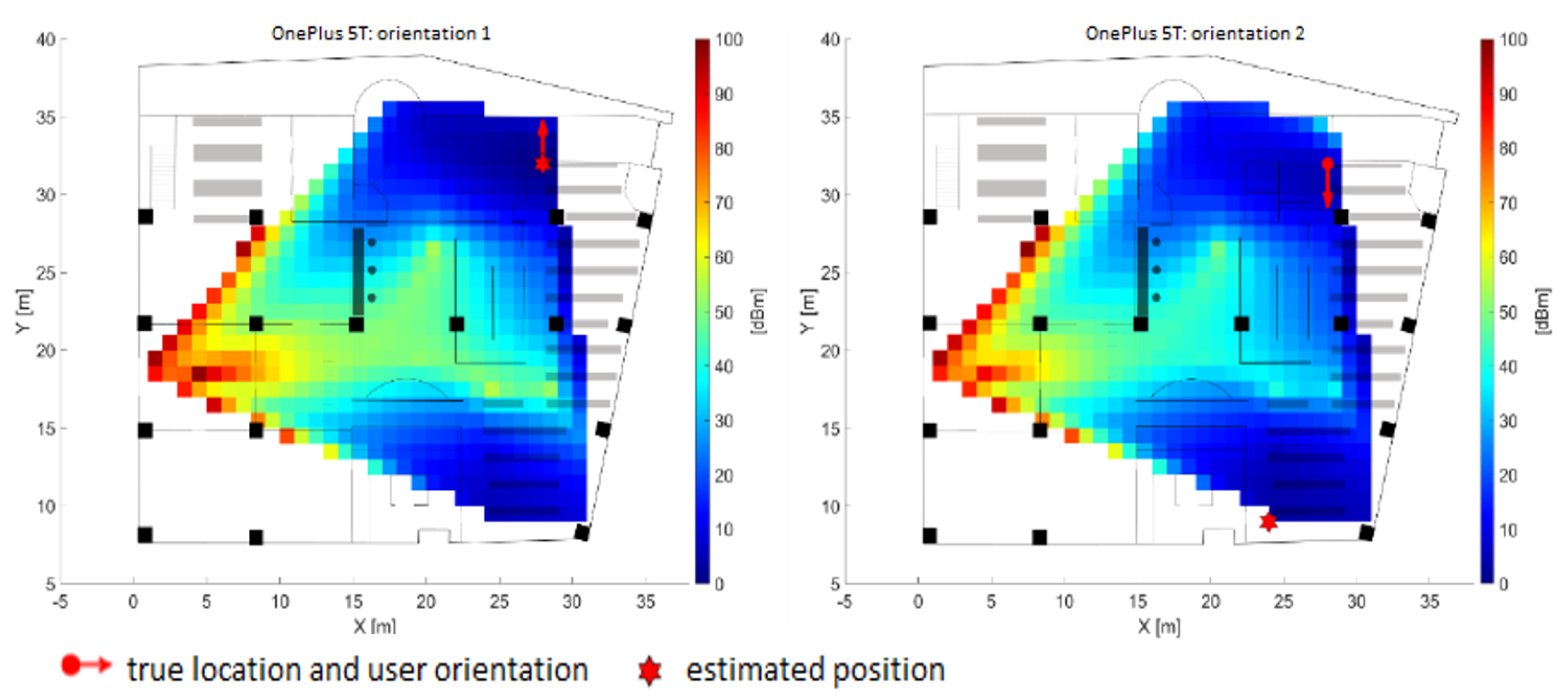
3.4. Location Fingerprinting
3.5. Scene Analysis
3.6. Promising Alternative Techniques
4. Inertial Navigation (IN) as Primary Sensor
4.1. INS Trajectory Estimation
4.2. Inertial Navigation (IN)
4.3. Dead Reckoning (DR) Principle
4.4. Map Matching (MM)
4.5. Activity and Step Detection
4.6. Indoor Altitude Determination
5. Combination of MEMS-Based INS with Other Sensor Systems
5.1. RF-Based Wireless Options
5.1.1. Wireless Fidelity (Wi-Fi)
- the ISTA sends an FTM request to the RSTA;
- the RSTA receives the request and returns an acknowledgement (ACK) signal to the ISTA;
- then several FTM feedbacks are sent from the RSTA to the ISTA; and
- then the mean RTT measurement is used for range calculation.
5.1.2. Bluetooth
5.1.3. Ultra-Wide Band (UWB)
5.1.4. Comparison of Wi-Fi, BLE and UWB
5.1.5. Hybrid Solutions
5.2. Vision-Aided Positioning
5.3. Sensor Fusion
6. Smartphone-Based Localization Capabilities
6.1. MEMS-Based Inertial Sensor Systems
6.2. Wi-Fi in Smartphones
6.3. UWB in Smartphones
6.4. Light Detection and Ranging (LiDAR)
6.5. 5G Cellular Networks
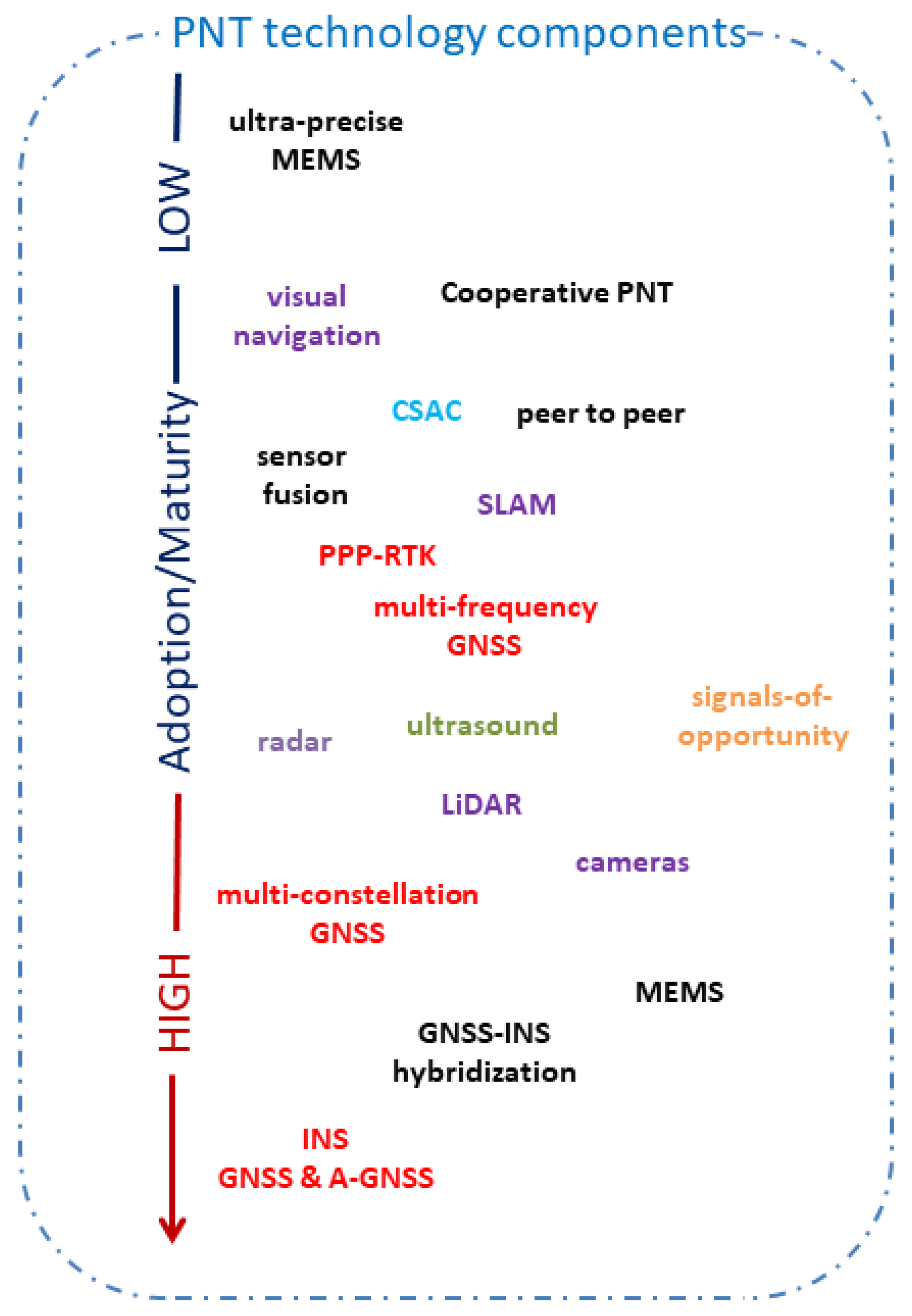
6.6. Evolution of PNT Solutions Leading to Cooperative Positioning (CP)
- inter-nodal ranging sub-system in a dynamic network;
- optimisation of dynamic network configuration;
- time synchronisation;
- optimum distributed sensor aperture size;
- communication sub-system;
- selection of master and anchor nodes; and
- network topology.
6.7. Application Fields
7. Comparison of Sensors, Technologies and Techniques
8. Concluding Remarks
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kealy, A.; Retscher, G. MEMS and Wireless Options in Cellular Phones for User Localization. In Proceedings of the ION Pacific PNT Conference, Honolulu, HI, USA, 1–4 May 2017; pp. 263–275. [Google Scholar]
- Barbeau, S. Dual-frequency GNSS on Android Devices. 2022. Available online: https://barbeau.medium.com/dual-frequency-gnss-on-android-devices-152b8826e1c (accessed on 14 June 2022).
- Darugna, F. Improving Smartphone-Based GNSS Positioning Using State Space Augmentation Techniques. Ph.D. Thesis, Verlag der Bayerischen Akademie der Wissenschaften, München, Germany, 2021. [Google Scholar]
- Retscher, G. Indoor Navigation. In Encyclopedia of Geodesy, Earth Sciences Series; Grafarend, E.W., Ed.; Springer International Publishing: Cham, Switzerland, 2016; Chapter 9; pp. 1–7. ISBN 978-3-319-02370-0. [Google Scholar] [CrossRef]
- Li, B.; Rizos, C. Editorial: Special Issue International Conference on Indoor Positioning and Navigation 2012, Part 2. J. Locat. Based Serv. 2014, 8, 1–2. [Google Scholar] [CrossRef]
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The Active Badge Location System. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Hightower, J.; Boriello, G. A Survey and Taxonomy of Location Systems for Ubiquitous Computing; Technical Report; University of Washington, Department of Computer Science and Engineering: Seattle, WA, USA, 2001. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Li, B.; Gallagher, T.; Rizos, C.; Dempster, A. Using Geomagnetic Field for Indoor Positioning. J. Appl. Geod. 2013, 7, 299–308. [Google Scholar] [CrossRef]
- Retscher, G. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors 2020, 20, 5121. [Google Scholar] [CrossRef]
- Retscher, G.; Kealy, A. Navigation Based on Sensors in Smartphones. In Positioning and Navigation in Complex Environments; Yu, K., Ed.; IGI Global: Hershey PA, USA, 2018; pp. 368–396. ISBN1 9781522535287. ISBN2 9781522535294. [Google Scholar] [CrossRef]
- Ruotsalainen, L. Vision-aided Pedestrian Navigation for Challenging GNSS Environments. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2013. [Google Scholar]
- EUSPA. GNSS User Technology Report 2018. Available online: https://www.gsa.europa.eu/newsroom/news/gnss-user-technology-report-2018-available-download-now (accessed on 30 June 2022).
- EUSPA. EUSPA EO and GNSS Market Report. Available online: https://www.euspa.europa.eu/sites/default/files/uploads/euspa_market_report_2022.pdf (accessed on 30 June 2022).
- Stojanović, D.; Stojanović, N. Indoor Localization and Tracking: Methods, Technologies and Research Challenges. Acta Univ. Ser. Autom. Control Robot. 2014, 13, 57–72. [Google Scholar]
- Ashraf, I.; Hur, S.; Park, Y. Smartphone Sensor Based Indoor Positioning: Current Status, Opportunities, and Future Challenges. Electronics 2020, 9, 89. [Google Scholar] [CrossRef]
- Retscher, G.; Li, Y.; Kealy, A.; Gikas, V. The Need and Challenges for Ubiquitous Positioning, Navigation and Timing (PNT) Using Wi-Fi. In Proceedings of the FIG Working Week, Amsterdam, The Netherlands, 10–14 May 2020; p. 18. [Google Scholar]
- Retscher, G.; Leb, A. Influence of the RSSI Scan Duration of Smartphones in Kinematic Wi-Fi Fingerprinting. In Proceedings of the FIG Working Week, Hanoi, Vietnam, 22–26 April 2019; p. 15. [Google Scholar]
- EUSPA. GNSS Market Report 2019, Issue 6. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/market_report_issue_6.pdf (accessed on 17 July 2022).
- Ochieng, W.; Sauer, K.; Walsh, D.; Brodin, G.; Griffin, S.; Denney, M. GPS Integrity and Potential Impact on Aviation Safety. J. Navig. 2003, 56, 51–65. [Google Scholar] [CrossRef]
- Gablea, J.; Kealy, A.; Hedley, M.; Moran, B. Case Study of Bayesian RAIM Algorithm Integrated with Spatial Feature Constraint and Fault Detection and Exclusion Algorithms for Multi-sensor Positioning. Navigation 2021, 68, 333–351. [Google Scholar] [CrossRef]
- European Global Navigation Satellite Systems Agency. Report on the Performance and Level of Integrity for Safety and Liability Critical Multi-Applications. 2015. Available online: https://www.euspa.europa.eu/sites/default/files/calls_for_proposals/Annex\T1\textsection%202.pdf (accessed on 1 July 2022).
- Salós, D.; Martineau, A.; Macabiau, C.; Bonhoure, B.; Kubrak, D. Receiver Autonomous Integrity Monitoring of GNSS Signals for Electronic Toll Collection. IEEE Trans. Intell. Transp. Syst. 2014, 15, 94–103. [Google Scholar] [CrossRef]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef]
- Imparato, D. GNSS-based Receiver Autonomous Integrity Monitoring for Aircraft Navigation. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2016. [Google Scholar] [CrossRef]
- Brown, A. Civil Aviation Integrity Requirements for the Global Positioning System. Navigation 1988, 35, 23–40. [Google Scholar] [CrossRef]
- Brown, A. A Baseline GPS RAIM Scheme and a Note on the Equivalence of Three RAIM Methods. Navigation 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Imparato, D.; El-Mowafy, A.; Rizos, C. Multifunctional Operation and Application of GPS; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Gabela, J. Multi-Sensor Cooperative Autonomous Integrity Monitoring for Intelligent Transport Systems. Ph.D. Thesis, The University of Melbourne, Parkville, Australia, 2021. [Google Scholar]
- Trevisiani, E.; Vitaleti, A. Cell-ID Location Technique, Limits and Benefits: An Experimental Study. In Proceedings of the 6th IEEE Workshop on Mobile Computing Systems and Applications WMCSA 2004, Windermere, UK, 3 December 2004; pp. 51–60. [Google Scholar]
- Chen, R. Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; IGI Global: Hershey PA, USA, 2012. [Google Scholar]
- Retscher, G.; Zhu, M.; Zhang, K. RFID Positioning. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey PA, USA, 2012; Chapter 4; pp. 69–95. ISBN 978-1-4666-1827-5. [Google Scholar] [CrossRef]
- Retscher, G.; Tatschl, T. Indoor Positioning with Differential Wi-Fi Lateration. J. Appl. Geod. 2017, 11, 249–269. [Google Scholar] [CrossRef]
- Retscher, G.; Hofer, H.; Kealy, A.; Gikas, V.; Obex, F. Cooperative Localization in Indoor Environments Using Constrained Differential Wi-Fi and UWB Measurements. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 2869–2882. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-building RF-based User Location and Tracking System. In Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies INFOCOM 2000, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Honkavirta, V. Location Fingerprinting Methods in Wireless Local Area Networks. Master’s Thesis, Tampere University of Technology, Tampere, Finland, 2008. [Google Scholar]
- Honkavirta, V.; Perälä, T.; Ali-Lötty, S.; Piche, R. A Comparative Survey of WLAN Location Fingerprinting Methods. In Proceedings of the IEEE 6th Workshop on Positioning Navigation and Communication WPNC 2009, Hannover, Germany, 19 March 2009. [Google Scholar]
- Moghtadaiee, V.; Dempster, A.G. Vector Distance Measure Comparison in Indoor Location Fingerprinting. In Proceedings of the IEEE International Global Navigation Satellite Systems IGNSS 2015 Conference, Gold Coast, Australia, 16–18 July 2015. [Google Scholar]
- Retscher, G.; Joksch, J. Analysis of Nine Vector Distances for Fingerprinting in Multiple-SSID Wi-Fi Networks. In Proceedings of the 7th International Conference Indoor Positioning and Indoor Navigation IPIN 2016, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; p. 5. [Google Scholar]
- Rojo, J.; Cidral, G.R.; Mendoza-Silva, G.M.; Laiapea, J.; Parrello, G.; Simo, A.; Stupin, L.; Minican, D.; Farres, M.; Corvalan, C.; et al. Machine Learning Applied to Wi-Fi Fingerprinting: The Experiences of the Ubiqum Challenge. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation IPIN 2019, Pisa, Italy, 30 September–3 October 2019. [Google Scholar]
- Figuera, C.; Rojo-Alvarez, J.L.; Wilby, M.; Mora-Jiménez, I.; Caamaño, A.J. Advanced Support Vector Machines for 802.11 Indoor Location. Signal Process. 2012, 92, 2126–2136. [Google Scholar] [CrossRef]
- Roos, T.; Myllymäki, P.; Tirri, H. A Statistical Modeling Approach to Location Estimation. IEEE Trans. Mob. Comput. 2002, 99, 59–69. [Google Scholar]
- Koch, K.R. Einführung in die Bayes-Statistik; Springer: Berlin/Heidelberg, Germany, 2000. (In German) [Google Scholar]
- Leb, A.; Retscher, G. Study for the Development of a Guidance and Information System Based on Wi-Fi for TU Wien. In Proceedings of the FIG eWorking Week, Leiden, The Netherlands, 20–25 June 2021; p. 25. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel Approach to Nonlinear/non-Gaussian Bayesian State Estimation. IEE Proc. F 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Retscher, G.; Leb, A. Development of a Smartphone-based University Library Navigation and Information Service Employing Wi-Fi Location Fingerprinting. Sensors 2021, 21, 432. [Google Scholar] [CrossRef]
- Gabela, J.; Goel, S.; Kealy, A.; Hedley, M.; Moran, B.; Williams, S. Cramér Rao Bound Analysis for Cooperative Positioning in Intelligent Transportation Systems. In Proceedings of the International Global Navigation Satellite Systems IGNSS 2018, Sydney, Australia, 6–8 December 2018. [Google Scholar]
- Laitinen, E.; Lohan, E. Access Point Topology Evaluation and Optimization Based on Cramér-Rao Lower Bound for WLAN Indoor Positioning. In Proceedings of the 2016 International Conference on Localization and GNSS ICL-GNSS, Barcelona, Spain, 28–30 June 2016. [Google Scholar]
- Li, Q.; Li, W.; Sun, W.; Li, J.; Liu, Z. Cramér-Rao Bound Analysis of Wi-Fi Indoor Localization Using Fingerprint and Assistant Nodes. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference VTC-Fall, Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A.; Moses, R.; Correal, N. Locating the Nodes: Cooperative Localization in Wireless Sensor Networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Ilkovicová, D.; Erdélyi, J.; Kopázik, A. Positioning in Indoor Environment using QR Codes. In Proceedings of the International Conference on Engineering Surveying INGEO 2014, Prague, Czech Republic, 3–4 April 2014. [Google Scholar]
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible Light Positioning: A Roadmap for International Standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Li, L.; Hu, P.; Shen, G.; Zhao, F. Epsilon: A Visible Light Based Positioning System. In Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation NSDI 2014, Seattle, WA, USA, 2–4 April 2014; pp. 331–343. [Google Scholar]
- Center for Information & Systems Engineering ByteLight develops LED Lighting for “GPS-Like” Indoor Positioning System. 2022. Available online: https://www.bu.edu/cise/bytelight/ (accessed on 20 July 2022).
- Fujii, K. Extended Kalman Filter. Report, The ACFA-Sim-J Group. 2013. Available online: https://www-jlc.kek.jp/2004sep/subg/offl/kaltest/doc/ReferenceManual.pdf (accessed on 24 August 2022).
- Gelb, A. Applied Optimal Estimation; The MIT Press: Cambridge, MA, USA; Massachusetts Institute of Technology: London, UK, 1974. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Report, UNC-Chapel Hill TR 95-041; University of North Carolina: Chapel Hill, NC, USA, 2014. [Google Scholar]
- Randell, C.; Djiallis, C.; Muller, H. Personal Position Measurement Using Dead Reckoning. In Proceedings of the 7th IEEE International Symposium on Wearable Computers, White Plains, NY, USA, 21–23 October 2003. [Google Scholar] [CrossRef]
- Mok, E.; Retscher, G.; Wang, D.; Xia, L. Use of Smartphones for Tracking and Trip Recording. In Proceedings of the 8th International Symposium on Location-Based Services, Vienna, Austria, 21–23 December 2011; pp. 137–152. [Google Scholar]
- Beauregard, S. A Helmet-mounted Pedestrian Dead Reckoning System. In Proceedings of the International Forum on Applied Wearable Computing IFAWC 2006, Bremen, Germany, 15–16 March 2006; pp. 1–11. [Google Scholar]
- Quddus, M.A.; Ochieng, W.Y.; Zhao, L.; Noland, R.B. A General Map Matching Algorithm for Transport Telematics Applications. GPS Solut. 2003, 7, 157–167. [Google Scholar] [CrossRef]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-matching in Complex Urban Road Networks. Braz. J. Cartogr. 2004, 55, 1–14. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current Map-matching Algorithms for Transport Applications: State-of-the-art and Future Research Directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef]
- El Sheimy, N.; Li, Y. Indoor Navigation: State of the Art and Future Trends. Satell. Navig. 2021, 2, 7. [Google Scholar] [CrossRef]
- Leśniak, A.; Górka, M.; Skrzypczak, I. Barriers to BIM Implementation in Architecture, Construction, and Engineering Projects—The Polish Study. Energies 2021, 14, 2090. [Google Scholar] [CrossRef]
- Zima, K.; Plebankiewicz, E.; Wieczorek, D. A SWOT Analysis of the Use of BIM Technology in the Polish Construction Industry. Buildings 2020, 10, 16. [Google Scholar] [CrossRef]
- Saeedi, S.; El-Sheimy, N. Activity Recognition Using Fusion of Low-Cost Sensors on a Smartphone for Mobile Navigation Application. Micromachines 2015, 6, 1100–1134. [Google Scholar] [CrossRef]
- Randell, C.; Muller, H. Context Awareness by Analysing Accelerometer Data. In Proceedings of the International Symposium on Wearable Computer, Atlanta, GA, USA, 16–17 October 2000; pp. 175–176. [Google Scholar]
- Lee, S.; Mase, K. Activity and Location Recognition Using Wearable Sensors. IEEE Pervasive Comput. 2002, 1, 24–32. [Google Scholar]
- Kim, J.W.; Jang, H.J.; Hwang, D.H.; Park, C. A Step, Stride and Heading Determination for the Pedestrian Navigation System. J. Glob. Position. Syst. 2004, 3, 273–279. [Google Scholar] [CrossRef]
- Goyal, P.; Ribeiro, V.; Saran, H.; Kumar, A. Strap-down Pedestrian Dead-reckoning System. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation IPIN 2011, Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Marschollek, M.; Goevercin, M.; Wolf, K.H.; Song, B.; Gietzelt, M.; Haux, R.; Steinhagen-Thiessen, E. A Performance Comparison of Accelerometry-based Step Detection Algorithms on a Large, Non-laboratory Sample of Healthy and Mobility-impaired Persons. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society EMBS 2008, Vancouver, BC, Canada, 20–25 August 2008; pp. 1319–1322. [Google Scholar]
- Brajdic, A.; Harle, R. Walk Detection and Step Counting on Unconstrained Smartphones. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing UbiComp 2013, Zurich, Switzerland, 8–12 September 2013; pp. 225–234. [Google Scholar]
- Liu, J. Hybrid Positioning with Smart Phones. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey PA, USA, 2012; pp. 159–194. [Google Scholar]
- Mezentsev, O.A. Sensor Aiding of HSGPS Pedestrian Navigation. Ph.D. Thesis, Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Moafipoor, S. Intelligent Personal Navigator Supported by Knowledge-Based Systems for Estimating Dead Reckoning Navigation Parameters. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2009. [Google Scholar]
- Retscher, G. Augmentation of Indoor Positioning Systems with a Barometric Pressure Sensor for Direct Altitude Determination in a Multi-storey Building. J. Cartogr. Geogr. Inf. Sci. CaGIS 2007, 34, 305–310. [Google Scholar] [CrossRef]
- Chen, R.; Pei, L.; Liu, J.; Leppäkoski, H. WLAN and Bluetooth Positioning in Smart Phones. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey PA, USA, 2012; pp. 44–68. [Google Scholar]
- Faragher, R.; Harle, R. An Analysis of the Accuracy of Bluetooth Low Energy for Indoor Positioning Applications. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation ION GNSS+ 2014, Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Kotanen, A.; Hännikäinen, M.; Leppäkoski, H.; Hämälainen, T.D. Positioning with IEEE 802.11b Wireless LAN. In Proceedings of the 14th International Symposium on Personal, Indoor and Mobile Radio Communications PIMRC, Beijing, China, 7–10 September 2003; pp. 2218–2222. [Google Scholar]
- van Diggelen, F.; Want, R.; Wang, W. How to Achieve 1-m Accuracy in Android. GPS World. 2018. Available online: https://www.gpsworld.com/how-to-achieve-1-meter-accuracy-in-android/ (accessed on 24 August 2022).
- Banin, L.; Bar-Shalom, O.; Dvorecki, N.; Amizur, Y. High-Accuracy Indoor Geolocation Using Collaborative Time of Arrival (CToA). Intel White Paper 2017. Available online: https://www.researchgate.net/publication/320146822_High-Accuracy_Indoor_Geolocation_using_Collaborative_Time_of_Arrival_CToA (accessed on 24 August 2022).
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Ye, F.; Liu, Z. A Robust Dead Reckoning Algorithm Based on Wi-Fi FTM and Multiple Sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef]
- Horn, B. Doubling the Accuracy of Indoor Positioning: Frequency Diversity. Sensors 2020, 20, 1489. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Zhang, N.; Wang, M. Wireless Sensors in Agriculture and Food Industry—Recent Development and Future Perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Prasithsangaree, P.; Krishnamurthi, P.; Chrysanthis, P.K. On Indoor Position with Wireless LANs. In Proceedings of the 13th IEEE International Symposium on Personal, Indoor, and Mobile Radio Communications PIMRC 2002, Lisbon, Portugal, 18 September 2002; Volume 2, pp. 720–724. [Google Scholar]
- Chen, N. Bluetooth Low Energy Based CoAP Communication in IoT CoAPNonIP: An Architecture Grants CoAP in Wireless Personal Area Networ. Master’s Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 2016. [Google Scholar]
- Khaled Salah, M. Bluetooth 5.0 Modem Design for IoT Devices; Springer International Publishing AG: Cham, Switzerland, 2021. [Google Scholar]
- Yin, J.; Yang, Z.; Cao, H.; Liu, T.; Zhou, Z.; Wu, C. Bluetooth 5.0 and Mesh: New Milestones of IoT. ACM Trans. Sens. Netw. 2019, 15, 1–29. [Google Scholar] [CrossRef]
- Di Marco, P.; Park, P.; Pratesi, M.; Santucci, F. A Bluetooth-Based Architecture for Contact Tracing in Healthcare Facilities. J. Sens. Actuator Netw. 2020, 10, 2. [Google Scholar] [CrossRef]
- Retscher, G.; Zariqi, P.; Gartner, G. Analyses of Bluetooth Distance Measurements for Digital Contact Tracing. In Proceedings of the International Symposium on Geospatial Approaches to Combating COVID-19, Florence, Italy, 13–14 December 2021; p. 5. [Google Scholar]
- Dabove, P.; Di Pietra, V.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor Positioning Using Ultra-wide band (UWB) Technologies: Positioning Accuracies and Sensors’ Performances. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium PLANS 2018, Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies; Swiss Geodetic Commission, Geodetic-Geophysical Reports of Switzerland: Zurich, Switzerland, 2012; 134p. [Google Scholar]
- Goel, S. A Distributed Cooperative UAV Swarm Localization System: Development and Analysis. In Proceedings of the 30 International Technical Meeting of The Satellite Division of the Institute of Navigation ION GNSS+ 2017, Portland, OR, USA, 25–29 September 2017. [Google Scholar]
- Goel, S.; Kealy, A.; Lohani, B. Development and Experimental Evaluation of a Low-cost Cooperative UAV Localisation Network Prototype. J. Sens. Actuator Netw. 2018, 7, 42. [Google Scholar] [CrossRef]
- Gabela, J.; Retscher, G.; Goel, S.; Perakis, H.; Masiero, A.; Toth, C.; Gikas, V.; Kealy, A.; Koppanyi, Z.; Błaszczak-Bąk, W.; et al. Experimental Evaluation of a UWB based Cooperative Positioning System for Pedestrians in GNSS Denied Environment. Sensors 2019, 19, 5274. [Google Scholar] [CrossRef]
- Mazhar, F.; Gufran Khan, M.; Sällberg, B. Precise Indoor Positioning Using UWB: A Review of Methods, Algorithms and Implementations. Wirel. Pers. Commun. 2017, 19, 4467–4491. [Google Scholar] [CrossRef]
- Conti, A.; Dardari, D.; Win, M.Z. Experimental Results on Cooperative UWB-based Positioning Systems. In Proceedings of the 2008 IEEE International Conference on Ultra-Wideband, Hannover, Germany, 10–12 September 2008. [Google Scholar]
- Retscher, G.; Gikas, V.; Hofer, H.; Perakis, H.; Kealy, A. Range Validation of UWB and Wi-Fi for Integrated Indoor Positioning. Appl. Geomat. 2019, 11, 187–195. [Google Scholar] [CrossRef]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Sport Postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef]
- Perakis, H.; Gikas, V. Evaluation of Range Error Calibration Models for Indoor UWB Positioning Applications. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation IPIN 2018, Nantes, France, 24–27 September 2018. [Google Scholar]
- Retscher, G.; Kealy, A.; Gabela, J.; Li, Y.; Goel, S.; Toth, C.K.; Masiero, A.; Błaszczak-Bąk, W.; Gikas, V.; Perakis, H.; et al. A Benchmarking Measurement Campaign in GNSS-denied/challenged Indoor/outdoor and Transitional Environments. J. Appl. Geod. 2020, 14, 215–229. [Google Scholar] [CrossRef]
- Gikas, V.; Antoniou, C.; Retscher, G.; Panagopoulos, A.D.; Perakis, H.; Kealy, A.; Mpimis, T. A Low-Cost Wireless Sensors Positioning Solution For Indoor Parking Facilities Management. J. Locat. Based Serv. 2016, 10, 241–261. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Liu, D. Research on Extended Kalman Filter and Particle Filter Combinational Algorithm in UWB and Foot-Mounted IMU Fusion Positioning. Mob. Inf. Syst. 2018, 2018, 1587253. [Google Scholar] [CrossRef]
- Alvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. WiFi FTM, UWB and Cellular-Based Radio Fusion for Indoor Positioning. Sensors 2021, 21, 7020. [Google Scholar] [CrossRef]
- Kiss, D. Evaluation of GNSS/UWB Fusion with Weighted Least Squares. Bachelor Thesis, TU Wien, Vienna, Austria, 2022. [Google Scholar]
- Li, X.; Wang, J.; Li, T. Seamless Positioning and Navigation by Using Geo-referenced Images and Multi-sensor Data. Sensors 2013, 13, 9047–9069. [Google Scholar] [CrossRef]
- Ruotsalainen, L.; Kuusniemi, H. Visual Positioning in a Smartphone. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey PA, USA, 2012; pp. 130–158. [Google Scholar]
- Ruotsalainen, L.; Kuusniemi, H.; Chen, R. Visual-aided Two-dimensional Pedestrian Indoor Navigation with a Smartphone. J. Glob. Position. Syst. 2011, 10, 11–18. [Google Scholar] [CrossRef]
- Aoki, H.; Schiele, B.; Pentland, A. Realtime Personal Positioning System for Wearable Computers. In Proceedings of the 3rd IEEE International Symposium on Wearable Computers ISWC 1999, Washington, DC, USA, 18–19 October 1999; pp. 37–44. [Google Scholar]
- Robertson, D.; Cipolla, R. An Image-based System for Urban Navigation. In Proceedings of the British Machine Vision Conference, Kingston-upon-Thames, UK, 7–9 September 2004; pp. 260–272. [Google Scholar]
- Steinhoff, U.; Omerčević, D.; Perko, R.; Schiele, B.; Leonardis, A. How Computer Vision Can Help in Outdoor Positioning. In Proceedings of the European Conference on Ambient Intelligence, Darmstadt, Germany, 7–10 November 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 124–141. [Google Scholar]
- Zhang, W.; Kosecka, J. Image Based Localization in Urban Environments. In Proceedings of the 3rd International Symposium on 3D Data Processing, Visualization and Transmission, Chapel Hill, NC, USA, 14–16 June 2006; IEEE Computer Society: Chapel Hill, NC, USA, 2006; pp. 33–40. [Google Scholar]
- Hide, C.; Botterill, T.; Andreotti, M. An Integrated IMU, GNSS and Image Recognition Sensor for Pedestrian Navigation. In Proceedings of the ION GNSS Conference, Savannah, GA, USA, 22–25 September 2009; Institute of Navigation: Savannah, GA, USA, 2009. [Google Scholar]
- Cummins, M.; Newman, P. Accelerated Appearance-only SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1828–1833. [Google Scholar]
- Nistér, D.; Naroditsky, O.; Bergen, J. Visual Odometry. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; Volume 1, p. I–652. [Google Scholar]
- Yousif, K.; Bab-Hadiashar, A.; Hoseinnezhad, R. An Overview to Visual Odometry and Visual SLAM: Applications to Mobile Robotics. Intell. Ind. Syst. 2015, 1, 289–311. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry [Tutorial]. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Grisetti, G.; Kummerle, R.; Stachniss, C.; Burgard, W. VA Tutorial on Graph-based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Kaess, M.; Ranganathan, A.; Dellaert, F. ISAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Olson, E.; Leonard, J.; Teller, S. Fast Iterative Alignment of Pose Graphs with Poor Initial Estimates. In Proceedings of the IEEE International Conference on Robotics and Automation ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2262–2269. [Google Scholar]
- Kleeman, L. Advanced Sonar and Odometry Error Mdeling for Simultaneous Localisation and Map Building. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2003, Las Vegas, NV, USA, 27–31 October 2003; Volume 1, pp. 699–704. [Google Scholar]
- Abrate, F.; Bona, B.; Indri, M. Experimental EKF-based SLAM for Mini-rovers with IR Sensors Only. In Proceedings of the 3rd European Conference on Mobile Robots, Freiburg, Germany, 19–21 September 2007. [Google Scholar]
- Cole, D.; Newman, P. Using Laser Range Data for 3D SLAM in Outdoor Environments. In Proceedings of the IEEE International Conference on Robotics and Automation ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1556–1563. [Google Scholar] [CrossRef]
- Hartmann, F.; Rifat, D.; Stork, W. Hybrid Indoor Pedestrian Navigation Combining an INS and a Spatial Non-uniform UWB-network. In Proceedings of the 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Gädeke, T.; Schwalb, T.; Schmid, J.; Stork, W.; Müller-Glaser, K.D. Hybrid Person Localization in Ad-hoc Networks Using Model-based Control and Visualization. In Proceedings of the IEEE 1st International Symposium on Wireless Systems (IDAACS-SWS), Offenburg, Germany, 20–21 September 2012. [Google Scholar]
- Zhang, M.; Shen, W.; Yao, Z.; Zhu, J. Multiple Information Fusion Indoor Location Algorithm Based on WiFi and Improved PDR. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Zhao, W.; Han, S.; Hu, R.Q.; Meng, W.; Jia, Z. Crowdsourcing and Multisource Fusion-based Fingerprint Sensing in Smartphone Localization. IEEE Sens. J. 2018, 18, 3236–3247. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-based Indoor Localization and Tracking with iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Dellaert, F.; Fox, D.; Burgard, W.; Thrun, S. Monte Carlo Lcalization for Mobile Robots. In Proceedings of the IEEE International Conference Robotics and Automation 1999, Detroit, MI, USA, 10–15 May 1999; Volume 2, pp. 1322–1328. [Google Scholar]
- Hasnur Rabiain, A.; Kealy, A.; Retscher, G.; Alam, N.; Dempster, A.; Grejner-Brzezinska, D.A.; Toth, C.; Gikas, V. Cooperative Positioning Algorithms and Techniques for Land Mobile Applications. In Proceedings of the 8th International Symposium on Mobile Mapping Technology, Tainan, Taiwan, 1–3 May 2013. [Google Scholar]
- Atia, M.M.; Korenberg, M.; Noureldin, A. A WiFi-aided Reduced Inertial Sensors-based Navigation System with Fast Embedded Implementation of Particle Filtering. In Proceedings of the 8th International Symposium on Mechatronics and Its Applications (ISMA 2012), Sharjah, United Arab Emirates, 10–12 April 2012; pp. 1–5. [Google Scholar]
- Wu, Z.; Jedari, E.; Muscedere, R.; Rashidzadeh, R. Improved Particle Filter Based on WLAN RSSI Fingerprinting and Smart Sensors for Indoor Localization. Comput. Commun. J. 2016, 83, 64–71. [Google Scholar] [CrossRef]
- Xu, X.; Wang, M.; Luo, L.; Meng, Z.; Wang, E. An Indoor Pedestrian Localization Algorithm based on Multi-sensor Information Fusion. Comput. Commun. J. 2017, 5, 102–115. [Google Scholar] [CrossRef]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-based Pedestrian Tracking Using Particle Filters and Low-cost MEMS Sensors. In Proceedings of the 4th Workshop Positioning, Navigation and Communication (WPNC), Hanover, Germany, 22 March 2007; pp. 1–7. [Google Scholar]
- Evennou, F.; Marx, F. Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning. EURASIP J. Adv. Signal Process. 2006, 2006, 086706. [Google Scholar] [CrossRef]
- Guo, X.; Shao, W.; Zhao, F.; Wang, Q.; Li, D.; Luo, H. WiMag: Multimode Fusion Localization System bBased on Magnetic/WiFi/PDR. In Proceedings of the International Conference on Indoor Positioning Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Chen, X.; Yan, X.; Shen, X. Indoor Positioning Fusion Algorithm for Smartphones. In Proceedings of the International Conference on Indoor Positioning Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 620–626. [Google Scholar]
- Nurminen, H.; Ristimaki, A.; Ali-Loytty, S.; Piché, R. Particle Filter and Smoother for Indoor Localization. In Proceedings of the International Conference on Indoor Positioning Indoor Navigation (IPIN), Montbéliard, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor Localization Using Pervasive Mgnetic field and Opportunistic WiFi Sensing. EEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Liu, J.; Chen, R.; Pei, L.; Chen, W.; Tenhunen, T.; Kuusniemi, H.; Kröger, T.; Chen, Y. Accelerometer Assisted Robust Wireless Signal Positioning Based on a Hidden Markov Model. In Proceedings of the IEEE/ION Positioning, Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 488–497. [Google Scholar]
- Wymeersch, H.; Lien, J.; Win, M. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Weinberg, M.; Kourepenis, A. Error Sources in In-plane Silicon Tuning Fork Gyroscopes. J. Micromechanical Syst. 2006, 15, 479–491. [Google Scholar] [CrossRef]
- Zorn, A. GPS-aided All-accelerometer Inertial Navigation. In Proceedings of the International Technical Meeting of Satellite Division of the Institute of Navigation, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Barbour, N.M. Inertial Navigation Sensors. Report, Charles Stark Draper Laboratory (P-4994) Cambridge, MA, USA, 2010. 2010. Available online: https://www.sto.nato.int/publications/STO%20Educational%20Notes/RTO-EN-SET-116-2010/EN-SET-116(2010)-02.pdf (accessed on 24 August 2022).
- Herrera-May, A.L.; Aguilera-Cortés, L.A.; García-Ramírez, P.J.; Mota-Carrillo, N.B.; Padrón-Hernández, W.Y.; Fig, U.H. Development of Resonant Magnetic Field Microsensors: Challenges and Future Application. In Microsensors; Minin, O., Ed.; InTech: Rijeka, Croatia, 2011; pp. 65–84. [Google Scholar]
- Bao, M.H. Micro Mechanical Transducers, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Sharma, P.; Inoue, A. Metallic Glass. In Handbook of Silicon Based MEMS Materials and Technologies; William Andrew Applied Science Publisher: Norwich, NY, USA, 2010; pp. 447–472. [Google Scholar]
- Kulkarni, A.; Lim, A. Preliminary Study on Indoor Localization using Smartphone-Based IEEE 802.11mc. In Proceedings of the 15th International Conference on Emerging Networking Experiments and Technologies CoNEXT 2019, Roma, Italy, 6–9 December 2019. [Google Scholar]
- Bai, Y.; Kealy, A.; Retscher, G.; Holden, L. A Comparative Evaluation of Wi-Fi RTT and GPS Based Positioning. In Proceedings of the IGNSS 2020 Conference, Sydney, Australia, 5–7 February 2020. [Google Scholar]
- Yavari, M.; Nickerson, B. Ultra Wideband Wireless Positioning Systems; Report TR14-230; Department Fac. Computing Science, University of New Brunswick: Fredericton, NB, Canada, 2014. [Google Scholar]
- ETSI. Ultra Wide Band. 2020. Available online: https://www.etsi.org/technologies/ultra-wide-band?jjj=1596015945046 (accessed on 18 July 2022).
- Stephen, S. Apple’s U1 Chip, Android Boost UWB Tech That Lets Your Phone Unlock Your Car. 2022. Available online: https://www.cnet.com/tech/mobile/apples-u1-chip-and-android-brings-uwb-location-tech-to-your-car-or-home (accessed on 18 July 2022).
- Flueratoru, L.; Wehrli, S.; Magno, M.; Niculescu, D. On the Energy Consumption and Ranging Accuracy of Ultra-wideband Physical Interfaces. In Proceedings of the IEEE Global Communications Conference GLOBECOM 2020, Taipei, Taiwan, 7–11 December 2020; pp. 1–7. [Google Scholar]
- Wang, W.; Liu, Z.; Gao, J.; Saoda, N.; Campbell, B. UbiTrack: Enabling Scalable & Low-cost Device Localization with Onboard Wi-Fi. In Proceedings of the 8th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, Coimbra, Portugal, 17–18 November 2021; pp. 11–20. [Google Scholar]
- Mark, W. What Is a LiDAR Scanner, the iPhone 12 Pro’s Camera Upgrade, Anyway? 2021. Available online: https://www.techradar.com/news/what-is-a-lidar-scanner-the-iphone-12-pros-rumored-camera-upgrade-anyway (accessed on 18 July 2022).
- Andrews, J.G.; Buzzi, S.; Choi, W.; Hanly, S.V.; Lozano, A.; Soong, A.C.K.; Zhang, J.C. What Will 5G Be? IEEE J. Sel. Areas Commun. 2014, 32, 1065–1082. [Google Scholar] [CrossRef]
- Writisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-accuracy Localization for Assisted Living: 5G Systems Will Turn Multipath Channels from Foe to Friend. IEEE Signal Process. Mag. 2016, 33, 1065–1082. [Google Scholar]
- Zhang, P.; Lu, J.; Wang, Y.; Wang, Q. Cooperative Localization in 5G Networks; A Survey. ICT Express 2017, 3, 27–32. [Google Scholar] [CrossRef]
- Chen, E. The Impact of 5G on Location Technology: What’s Real and What’s Hype? 2021. Available online: https://www.pointr.tech/blog/5g-indoor-positioning (accessed on 24 August 2022).
- Masiero, A.; Toth, C.; Gabela, J.; Retscher, G.; Kealy, A.; Perakis, H.; Gikas, V.; Grejner-Brzezinska, D.A. Experimental Assessment of UWB and Vision-Based Car Cooperative Positioning System. Remote Sens. 2021, 13, 4858. [Google Scholar] [CrossRef]
- Rantakokko, J.; Rydell, J.; Strömbäck, P.; Händel, P.; Callmer, J.; Törnqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and Reliable Soldier and First Responder Indoor Positioning: Multisensor Systems and Cooperative Localisation. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar] [CrossRef]
- Wan, J.; Zhong, L.; Zhang, F. Cooperative Localisation of Multi-UAVs via Dynamic Nonparametric Belief Propagation under GPS Signal Loss Condition. Int. J. Distrib. Sens. Netw. 2014. [Google Scholar] [CrossRef]
- Alam, N.; Dempster, A.G. Cooperative Positioning for Vehicular Networks: Facts and Future. EEE Trans. Intell. Transp. Syst. 2013. [Google Scholar] [CrossRef]
- Bargshady, N.; Alsindi, N.A.; Pahlavan, K.; Ye, Y.; Akgul, F.O. Bounds on Performance of Hybrid WiFi-UWB Cooperative RF Localisation for Robotic Applications. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, PIMRC 2010, Istanbul, Turkey, 26–30 September 2010. [Google Scholar] [CrossRef]
- Li, L.; Li, D.; Zhu, H.; Li, Y. A Dual Growing Method for the Automatic Extraction of Individual Trees from Mobile Laser Scanning Data. ISPRS J. Photogramm. Remote Sens. 2016, 120, 37–52. [Google Scholar] [CrossRef]
- Carrillo-Arce, L.C.; Nerurkar, E.D.; Gordillo, J.L.; Roumeliotis, S.I. Decentralized Multi-robot Cooperative Localisation Using Covariance Intersection. In Proceedings of the Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar] [CrossRef]
- Huang, H.; Gartner, G.; Krisp, J.M.; Raubal, M.; de Weghe, N.V. Location Based Services: Ongoing Evolution and Research Agenda. J. Locat. Based Serv. 2018, 12, 63–93. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhammed, R.; Jones, S.; Noras, J.; Patwary, M.; Radriguetz, J. Indoor Location Identification Technologies for Real-time IoT-based Applications: An Inclusive Survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Mier, J.; Jaramillo-Alcázar, A.; Freire, J. At a Glance: Indoor Positioning Systems Technologies and Their Applications Areas. In Proceedings of the Information Technology and Systems (ICITS 2019): Advances in Intelligent Systems and Computing; Rocha, Á., Ferrás, C., Paredes, M., Eds.; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Pan Chan, D.; Arndt, D.; Ngo, P.; Gross, J.; Ni, J.; Rafford, M. Performance Evaluation of a UWB-RFID System for Potential Space Applications; NASA Johnson Space Center: Houston, TX, USA, 2006.
- Mesloh, C.; Henych, M.; Wolf, R.; Gallatin, K. Infrared Beacon Evaluation: Applications for Law Enforcement; Research Report; U.S. Department of Justice: Washington, DC, USA, 2008.
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Ekahau: Real-Time Location System. 2022. Available online: https://www.rfidsolutionsonline.com/doc/ekahau-real-time-location-system-0001 (accessed on 24 August 2022).
- ZONITH. Zonith Bluetooth Receiver. 2022. Available online: https://www.zonith.com/zonith-bluetooth-receiver (accessed on 24 August 2022).
- Ultra Wideband (UWB) Technology. 2022. Available online: https://www.zebra.com/gb/en/products/location-technologies/ultra-wideband.html (accessed on 24 August 2022).
- NDI. Optotrak. 2022. Available online: https://www.ndigital.com/ (accessed on 24 August 2022).
- Brignone, T.C.C.; Lyon, G.; Pradhan, S. Autonomous Self Assembling Sensor Network for Indoor Asset and Systems Management; Hewlett-Packard Development Company, LP USA: Houston, TX, USA, 2005. [Google Scholar]
- Youssef, A.; Agrawala, A.; Udaya Shankar, A. WLAN Location Determination via Clustering and Probability Distribution. In Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications (PerCom 2003), Fort Worth, TX, USA, 26 March 2003; pp. 143–150. [Google Scholar]
- Apple iBeacon. 2022. Available online: https://developer.apple.com/ibeacon (accessed on 24 August 2022).
- How Real-Time Location Systems Work. 2022. Available online: https://ubisense.com/location-technology/ (accessed on 24 August 2022).
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutorials 2018, 11, 13–32. [Google Scholar] [CrossRef]
- Medina, C.; Alvarez, I.; Segura, J.C.; de la Torre, A.; Benitez, C. TELIAMADE Ultrasonic Indoor Location System: Application as a Teaching Tool. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 2777–2780. [Google Scholar]
- Hansen, R.; Thomsen, B.; Thomsen, L.L.; Adamsen, F.S. SmartCampusAAU—An Open Platform Enabling Indoor Positioning and Navigation. In Proceedings of the 2013 IEEE 14th International Conference on Mobile Data Management (MDM), Milan, Italy, 3–6 June 2013; pp. 33–38. [Google Scholar]
- Ultra Wideband. 2022. Available online: https://www.qorvo.com/innovation/ultra-wideband (accessed on 24 August 2022).
- Aitenbichler, E.; Mulhauser, M. An IR Local Positioning System for Smart Items and Devices. In Proceedings of the 23rd International Conference on Distributed Computing Systems, Providence, RI, USA, 19–22 May 2003; pp. 334–339. [Google Scholar]
- Castro, P.; Chiu, P.; Kremenk, T.; Muntz, R. A Probabilistic Room Location Service for Wireless Networked Environments; Lecture Notes in Computer Science, Ubiquitous Computing Ubicomp; Springer: Atlanta, GA, USA, 2001. [Google Scholar]
- Gopikrishna, M.; Deepti Das, K. Time Domain Performance Evaluation of UWB Antennas. In Innovations in Ultra-Wideband Technologies; Sabban, A., Ed.; Intech Open: London, UK, 2012; pp. 159–194. [Google Scholar] [CrossRef]
- Wallbaum, M. WhereMaps: An Indoor Geolocation System. In Proceedings of the 13th IEEE InternationalcSymposium on Personal, Indoor and Mobile Radio Communications, Lisboa, Portugal, 15–18 September 2002; pp. 1967–1971. [Google Scholar]
- Pozyx. Multi Technology RTLS: Indoor—Outdoor. Report, Charles Stark Draper Laboratory (P-4994) Cambridge, MA, USA, 2022. Available online: https://www.pozyx.io/ (accessed on 24 August 2022).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Availability | Accuracy | Continuity | Integrity | Robustness | Indoor Penetration | TTFF | Latency | Power Consumption |
|---|---|---|---|---|---|---|---|---|---|
| Mass market | H | H | H | M | H | H | H | L | H |
| Safety and liability critical applications | H | H | H | H | H | L | H | H | M |
| Performance Level | Low | High |
|---|---|---|
| Application | Navigation, sports, tracking, social networking, enterprise applications, infotainment, games | Augmented Reality (AR), mHealth, geo marketing and advertising, fraud management and billing, safety and emergency |
| Key requirements | Availability TTFF | Accuracy Authentication Availability TTFF |
| Other requirements | Connectivity (incl. short range) Interoperability Power consumption | Connectivity (incl. short range) Interoperability Power consumption |
| Specification | Wi-Fi | BLE | UWB |
|---|---|---|---|
| Standard | IEEE 802.11 | IEEE 802.15.1 | IEEE 802.15.4 |
| Radio | Direct Sequence Spread Spectrum (DSSS) | Frequency Hopping Spread Spectrum (FHSS) | Orthogonal Frequency Division Multiplexing (OFDM) |
| Frequency range | 2.4 and 5 GHz | 2.402 and 2.48 GHz | 3.1 to 10.6 GHz |
| Data rate | 11 Mb/s | 1 Mb/s | >100 Mb/s |
| Latency | 30 ms | 20–30 ms | 0.1 ms |
| Extendibility | roaming possible | no | yes |
| Range [m] | 100 | 10–50 | 10–200 |
| Positioning Method | CoO, fingerprinting, lateration | CoO, lateration | lateration |
| Sensors | Navigation Information | Typical Accuracy | Characteristics |
|---|---|---|---|
| Accelerometer | accelerations , , | <0.03 m s | subject to drift calibration should be made when absolute positions are available |
| Gyroscope | azimuth (heading) | 0.5–3° | short term accuracy stability not subject to external disturbances, but to drifts calibration should be made when absolute positions are available |
| Magnetometer | azimuth (heading) | 0.5–3° | measurement of the azimuth in respective to the earth’s magnetic field long-term accuracy stability subject to magnetic disturbances sensitive to tilt |
| Barometric pressure sensor | height difference Z | 1–3 m | requires calibration by an initial height to provide heights with respect to a global reference frame |
| Temperature sensor | temperature T | 0.2–0.5 °C | requirement for barometric height conversion |
| Technology | 5G-mmWave | 5G-sub-6-GHz | 4G LTE |
|---|---|---|---|
| Speed | 1.8 Gbit/s | 50–400 MB/s | 35–53 MB/s |
| Range | short | medium | several hundreds’ of m |
| Environment | dense, urban areas or specified targeted spots | suburban and rural areas | widely applied globally |
| Scale | not enough BTS to support mmWave yet | supported by limited devices | supported by most mobile devices |
| Positioning Accuracy | less than 1 m | 20 m | 50 m |
| Signal | System | Technique | Method | Positioning | Type | Costs | Accuracy [m] |
|---|---|---|---|---|---|---|---|
| IR | Active beacons | proximity | CoO | absolute | symbolic | low | room level |
| IR | Kinect camera | scene analysis | computer vision | absolute and relative | geometric symbolic | high | 0.01–0.1 |
| US | Active Bat | lateration | ToA | absolute | geometric | high | 0.01–1 |
| RF | Cellular network | proximity hyperbolic lateration angulation | CoO TDoA AoA | absolute and relative | geometric | low | >50 |
| RF | Wi-Fi RSSI | fingerprinting lateration | RSSI | absolute | geometric | low | 3-5 |
| RF | Wi-Fi RTT | lateration | ToA | absolute | geometric | low | 0.1–1 |
| RF | Bluetooth | proximity fingerprinting lateration | CoO RSSI ToA | absolute and relative | geometric symbolic | medium | 1–10 |
| RF | UWB | lateration | ToA | absolute | geometric | medium | 0.01-1 |
| Magnetic | Ambient geomagnetic field | fingerprinting | pattern recognition | absolute | geometric | low | 1–5 |
| Magnetic | Induced magnetic field | lateration | ToA | absolute | geometric | high | 0.1–10 |
| Optical | Camera | scene analysis | computer vision | absolute and relative | geometric symbolic | low | 0.1–1 |
| Optical | QR codes | proximity | pattern recognition | absolute and relative | geometric symbolic | low | 1–10 |
| Optical | LED | lateration angulation | computer vision | absolute and relative | geometric | low | 0.5–1 |
| INS | Accelerometer | DR | accelerations , , | relative | geometric | low | <0.03 m s |
| INS | Gyroscope | DR | heading pitch roll | relative | geometric | low | 0.5–3 degree |
| Others | Magnetometer | DR | heading | relative | geometric | low | 0.5–3 degree |
| Others | Barometric pressure sensor | DR | altitude Z | relative | geometric | low | 1–3 |
| Technology | Access Point | Positioning Method | Positioning Accuracy | Advantages | Disadvantages |
|---|---|---|---|---|---|
| Cellular network (up to 4G LTE] | cellular tower (BTS) | CoO hyperbolic lateration lateration | >50 m | world wide coverage; no extra infrastructure needed | low precision |
| Wi-Fi RSSI | router | fingerprinting lateration | m | low-cost; easy deployment | low precision |
| Wi-Fi RTT | router | lateration | dm-m | low-cost; high accuracy | new Wi-Fi hardware needed |
| BLE | iBeacon | fingerprinting lateration | m | low-cost; easy deployment | low stability |
| UWB | UWB anchor | lateration | cm-dm | robust against multipath; high accuracy; easy deployment | still higher costs for anchor installation |
| Camera | N/A | scene analysis visual odometry | dm-m | no infrastructure needed | building up image database labourious |
| INS | N/A | DR | m | self-sufficient | accumulative error |
| Infrared | Ultrasound | Wi-Fi | BLE | UWB | |
|---|---|---|---|---|---|
| IPS | Active Badge [6] | Active Bat [7] | RADAR [35] | TOPAZ [170] | Sapphire Dart [171] |
| Examples | Firefly [172] | Cricket [173] | Ekahau [174] | ZONITH [175] | Zebra Dart [176] |
| OPTOTRAK [177] | Smart LOCUS [178] | Horus [179] | Apple iBEacon [180] | Ubisense [181] | |
| EIRIS [182] | TELIAMADE [183] | SmartCampusAAU [184] | Qorvo (Decawave) [185] | ||
| IRIS LPS [186] | Nibble [187] | TimeDomain [188] | |||
| WhereMaps [189] | Pozyx [190] | ||||
| Scalability | poor, 3D | poor, 3D | good, 2D, 3D | good, 2D, 3D | excellent, 2D, 3D |
| Accuracy | few m | dm - m | several m (RSSI) dm- m (RTT) | few m | cm - dm |
| Complexity | moderate | high | moderate | low | low |
| Robustness | low | low | high | low | high |
| Reliability | low | moderate | fair | high | fair |
| Energy Efficiency | low | high | moderate | low | low |
| Cost | moderate | high | low | low | moderate |
| Throughput | high | high | high | high | high |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Retscher, G. Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization. Geomatics 2023, 3, 1-46. https://doi.org/10.3390/geomatics3010001
Retscher G. Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization. Geomatics. 2023; 3(1):1-46. https://doi.org/10.3390/geomatics3010001
Chicago/Turabian StyleRetscher, Günther. 2023. "Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization" Geomatics 3, no. 1: 1-46. https://doi.org/10.3390/geomatics3010001
APA StyleRetscher, G. (2023). Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization. Geomatics, 3(1), 1-46. https://doi.org/10.3390/geomatics3010001