
Precipitation Data Retrieval and Quality Assurance from Different Data Sources for the Namoi Catchment in Australia

Abstract
:1. Introduction
2. Application Driven Requirements on Precipitation Data within WaterSENSE
3. Data Verification Setup in the Namoi Catchment
3.1. Verification Strategy
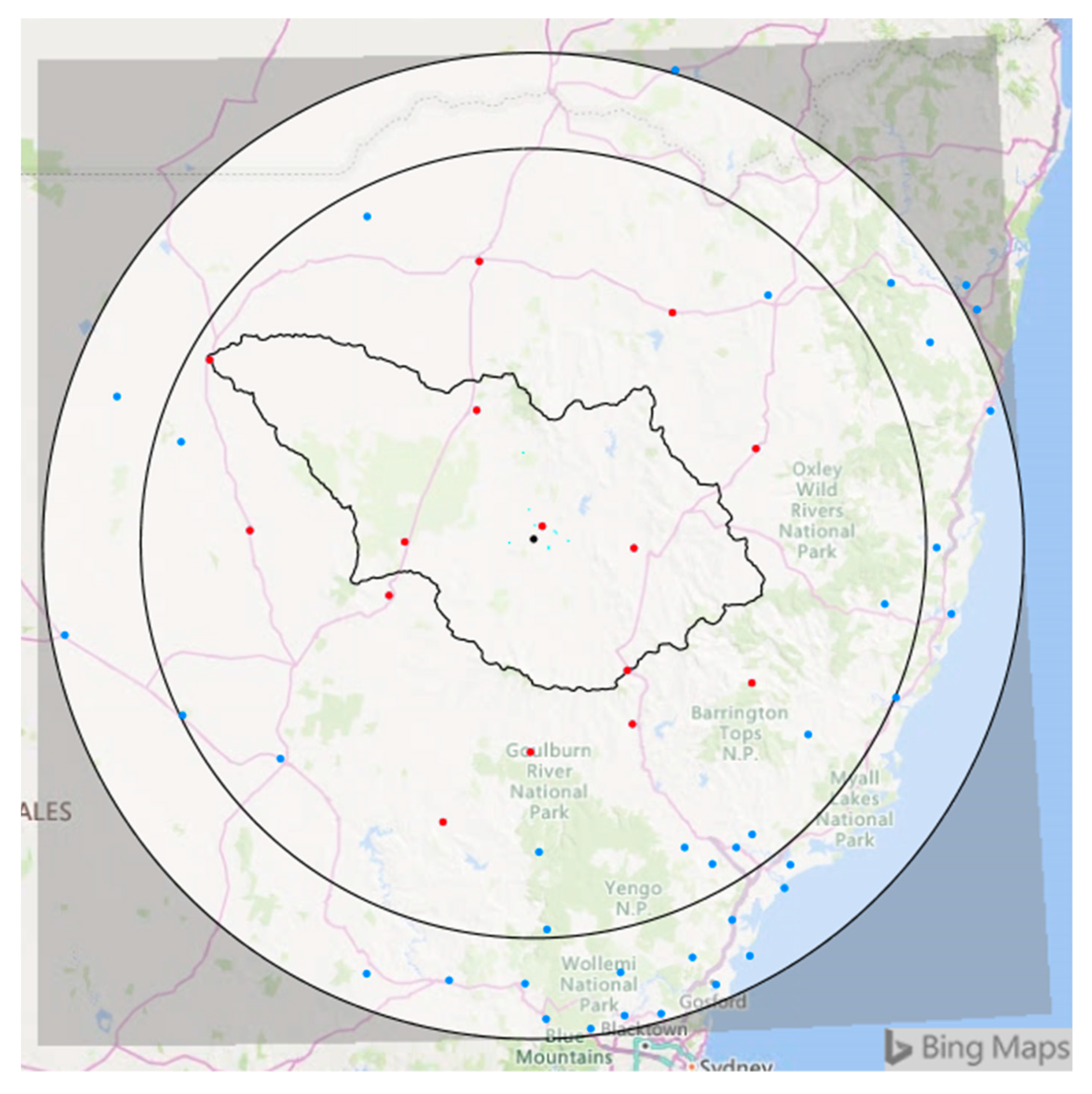
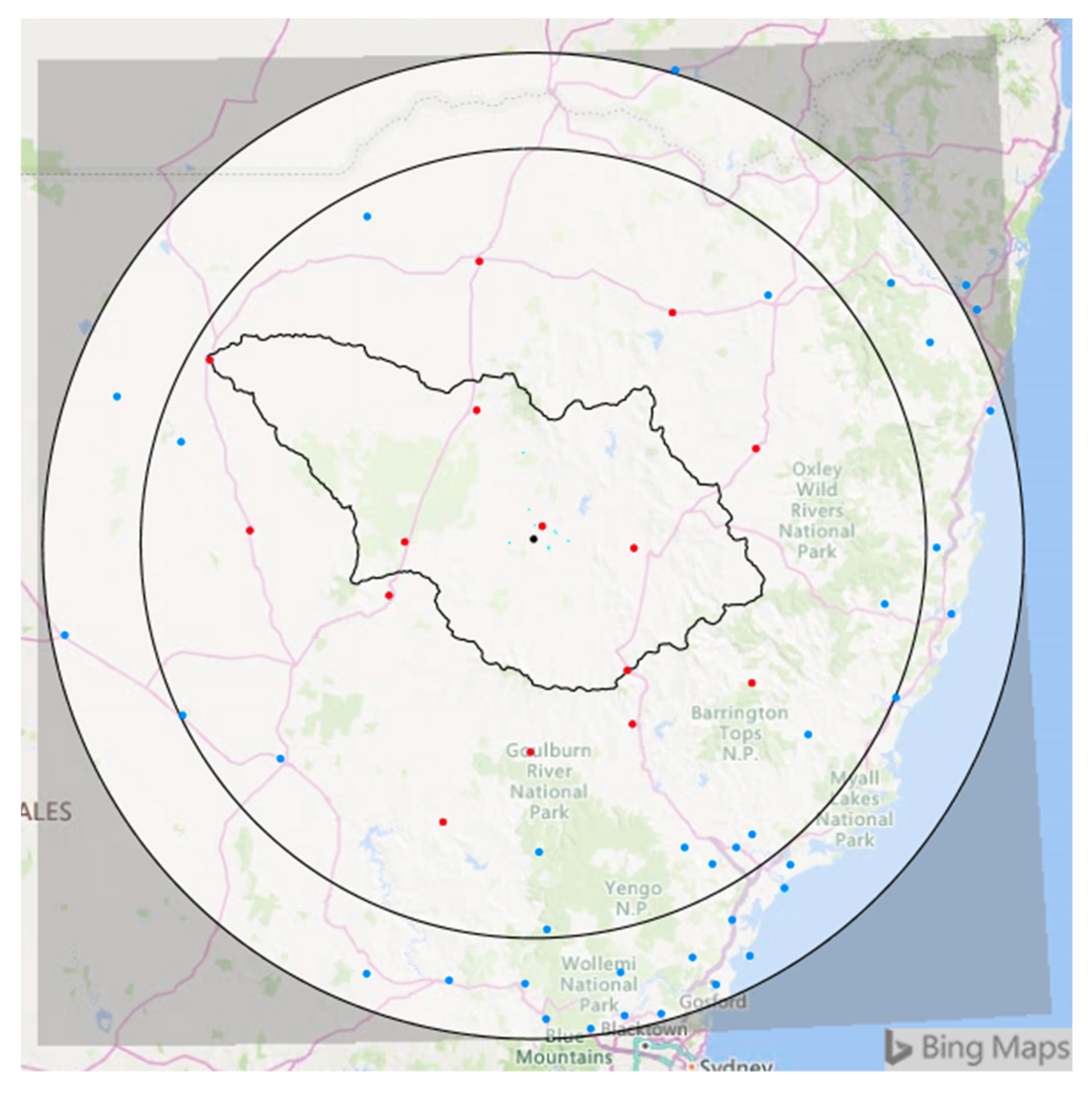
3.2. Namoi Catchment
3.3. Namoi Weather Radar
- Prior to October 2020 (polar data with a radial resolution of 500 m and a temporal resolution of 10 min)
- After October 2020 (polar data with a radial resolution of 250 m and a temporal resolution of 5 min)
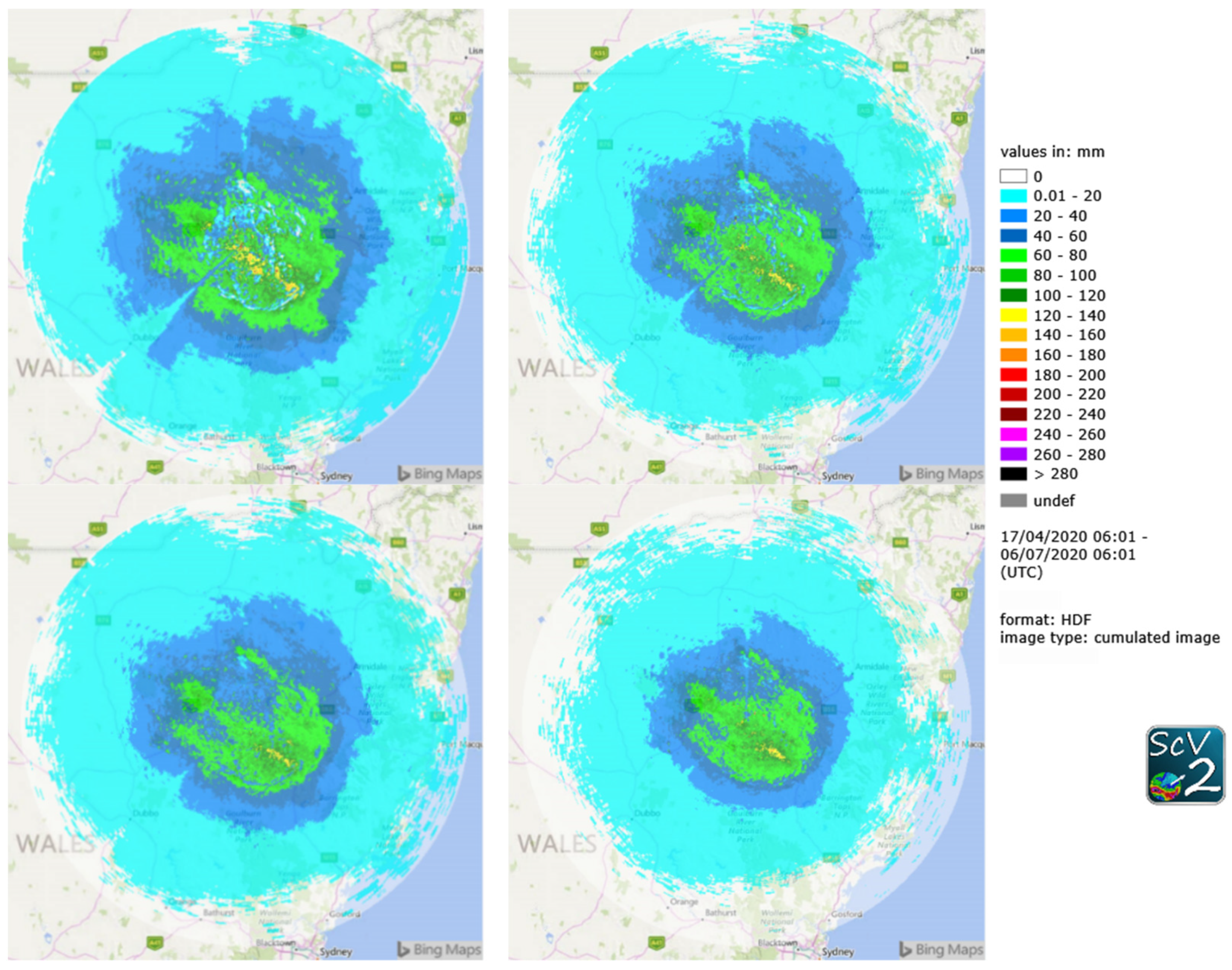
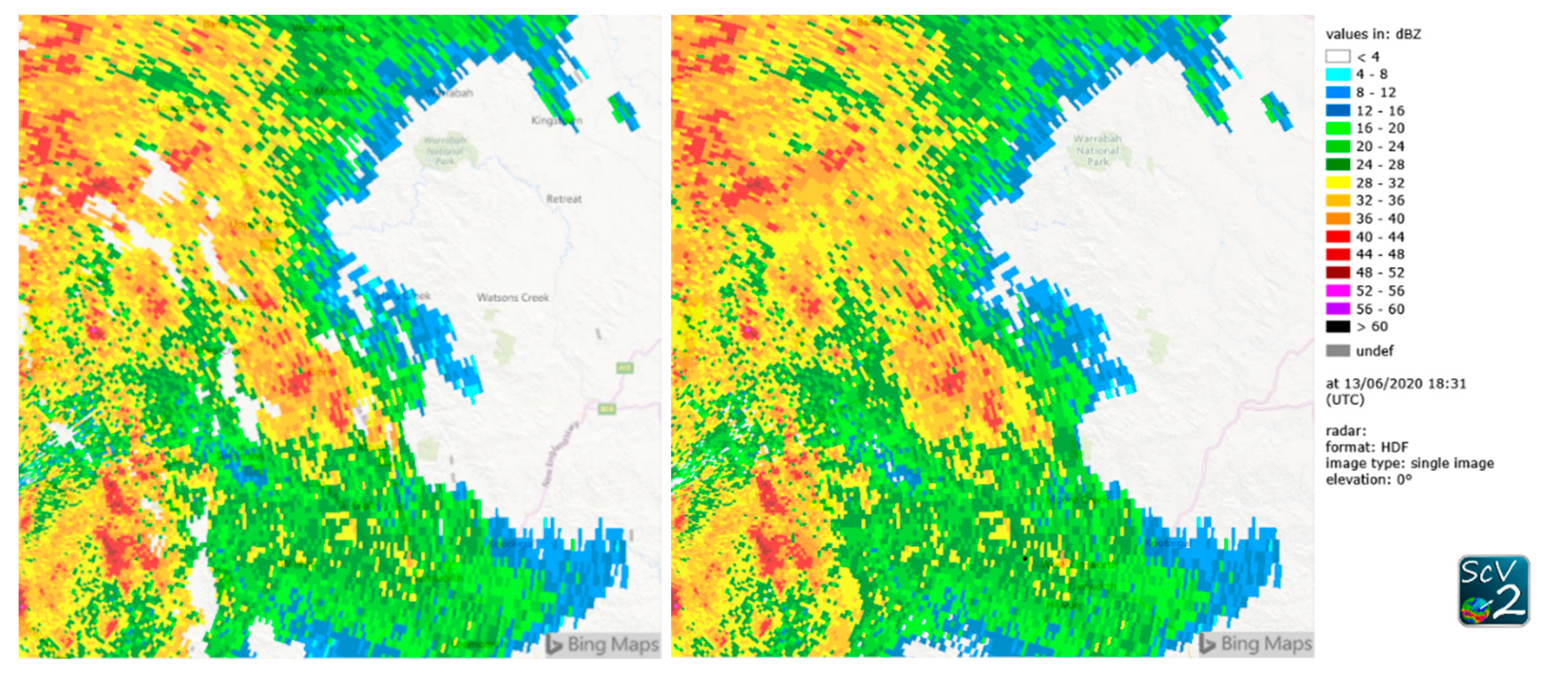
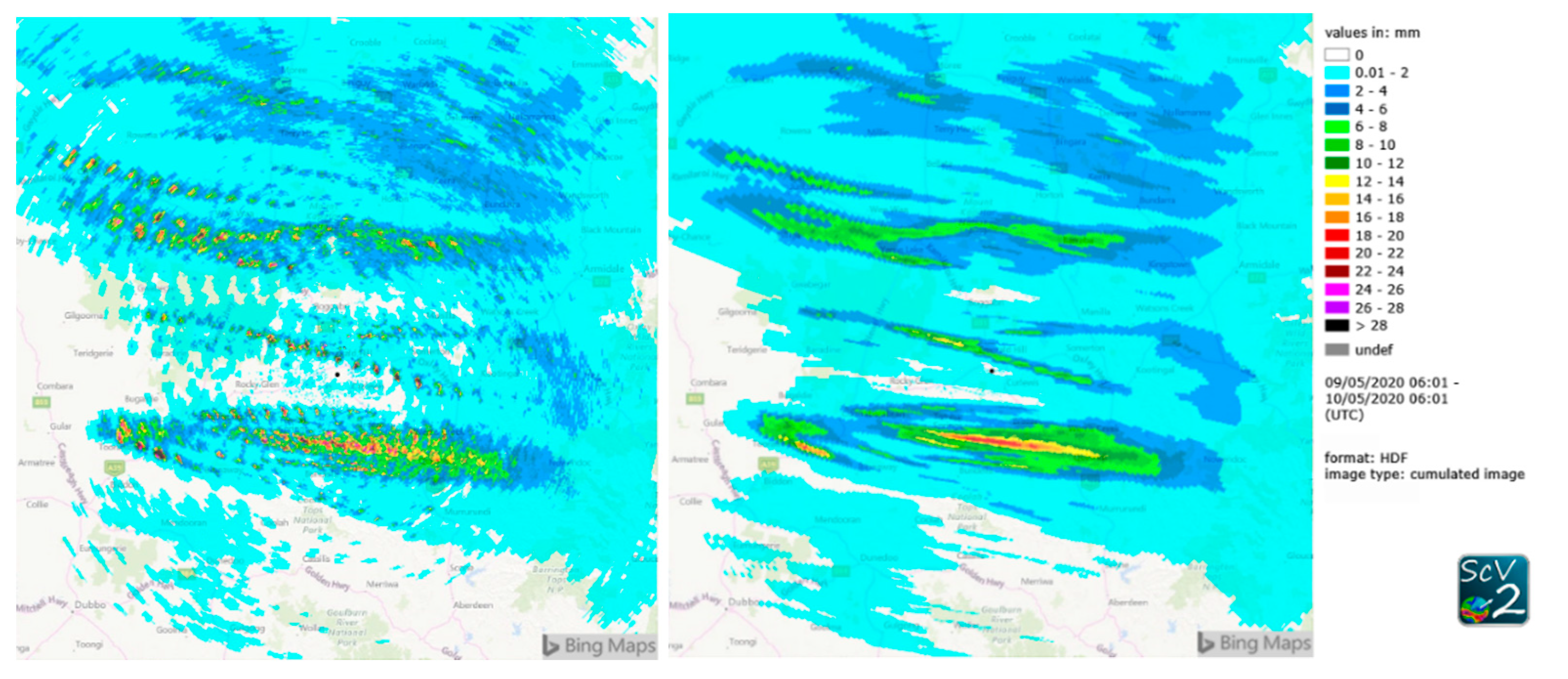
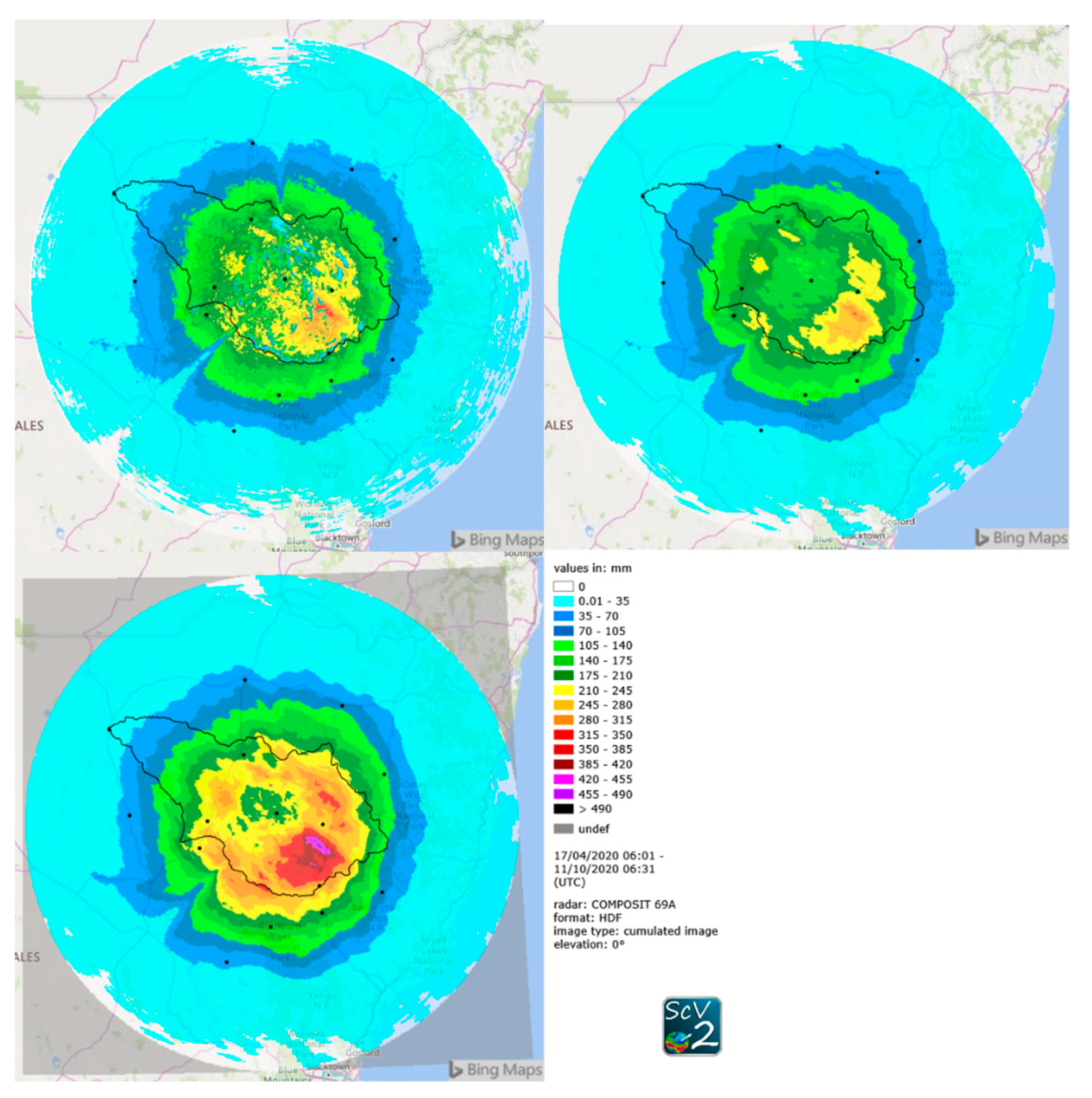
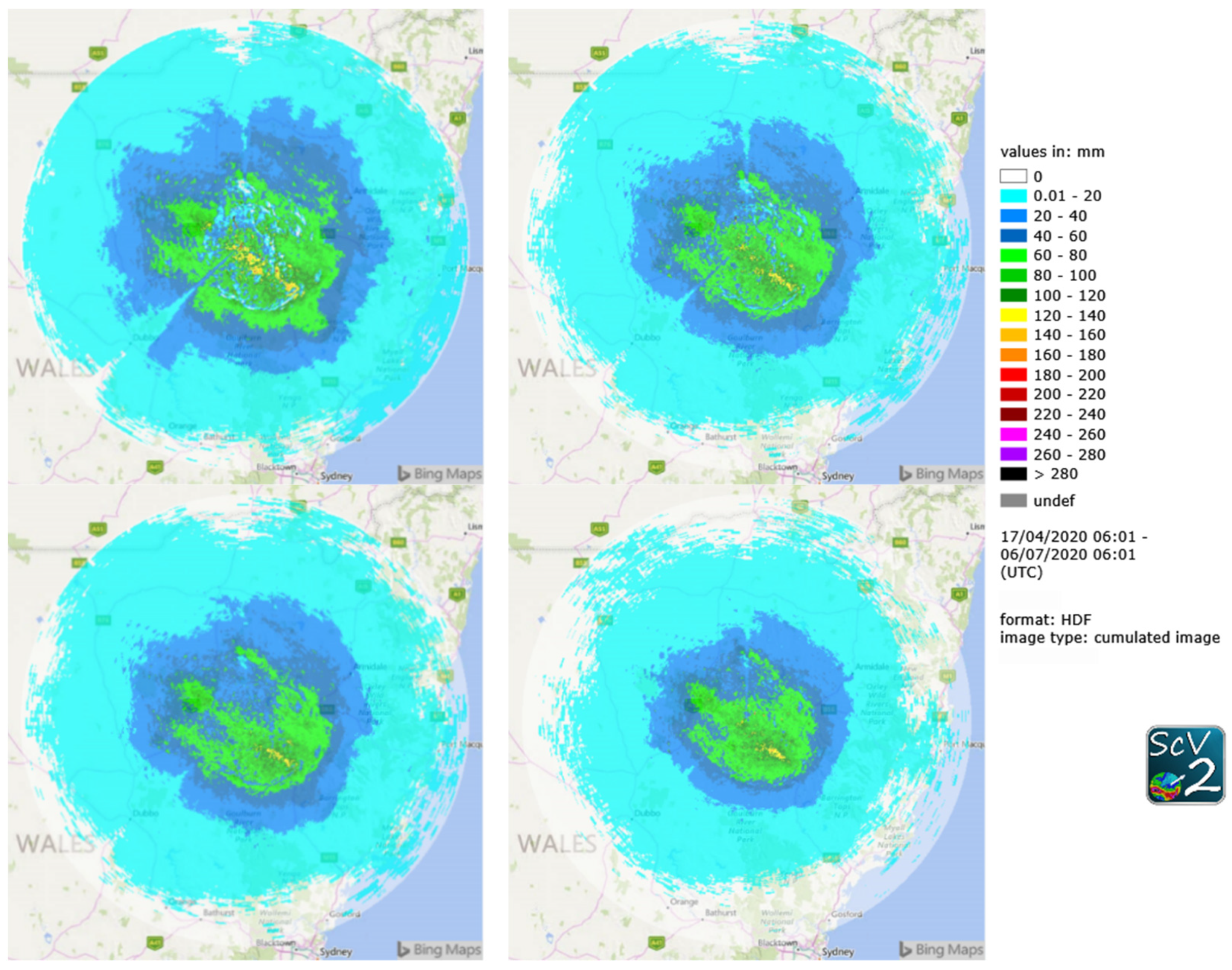
3.4. Radar Data Processing
- Clutter map: A radar-specific clutter map has been semi-automatically created based on the historical period (17 April 2020–11 October 2020). Pixels included in the clutter map are permanently deleted and replaced by an interpolation of the neighbouring pixels. Typical applications include the removal of clutter from mountains and towers.
- Speckle filter: This filter removes very small echoes (e.g., ships and air planes), defined by a configurable upper threshold for the number of non-zero pixels, which are surrounded by zero pixels. The filter can either operate on the whole image or on predefined pixels only.
- Reverse speckle filter: This filter deletes groups of zero pixels which are surrounded by non-zero pixels. The threshold for the maximum number of pixels can be configured. The filter can either operate on the whole image or on predefined pixels only.
- Gabella filter: A texture-based filter [13] is used to smooth extreme peaks in the image, e.g., due to ground clutter within a rain field. The filter can either operate on the whole image or on predefined pixels only.
- Beam blockage filter: A measurement data-based method to correct for beam blockage in polar radar data, which does not require the existence of a digital elevation model or precise knowledge about the radar parameters as other methods do [14]. Instead, a careful visual and statistical analysis of the radar data leads to the determination of beam-specific correction factors.
- Advection correction: This correction overcomes the fact that radar measurements are instantaneous measurements and do not provide rainfall volumes in time. Precipitation cells are detected and identified in consecutive images. A field of motion vectors is calculated, and the precipitation is distributed along the track of the cells based on the motion vector field. This gives a more realistic spatial distribution of the precipitation [15].
4. EO Data Sources
4.1. GSMaP
4.2. IMERG
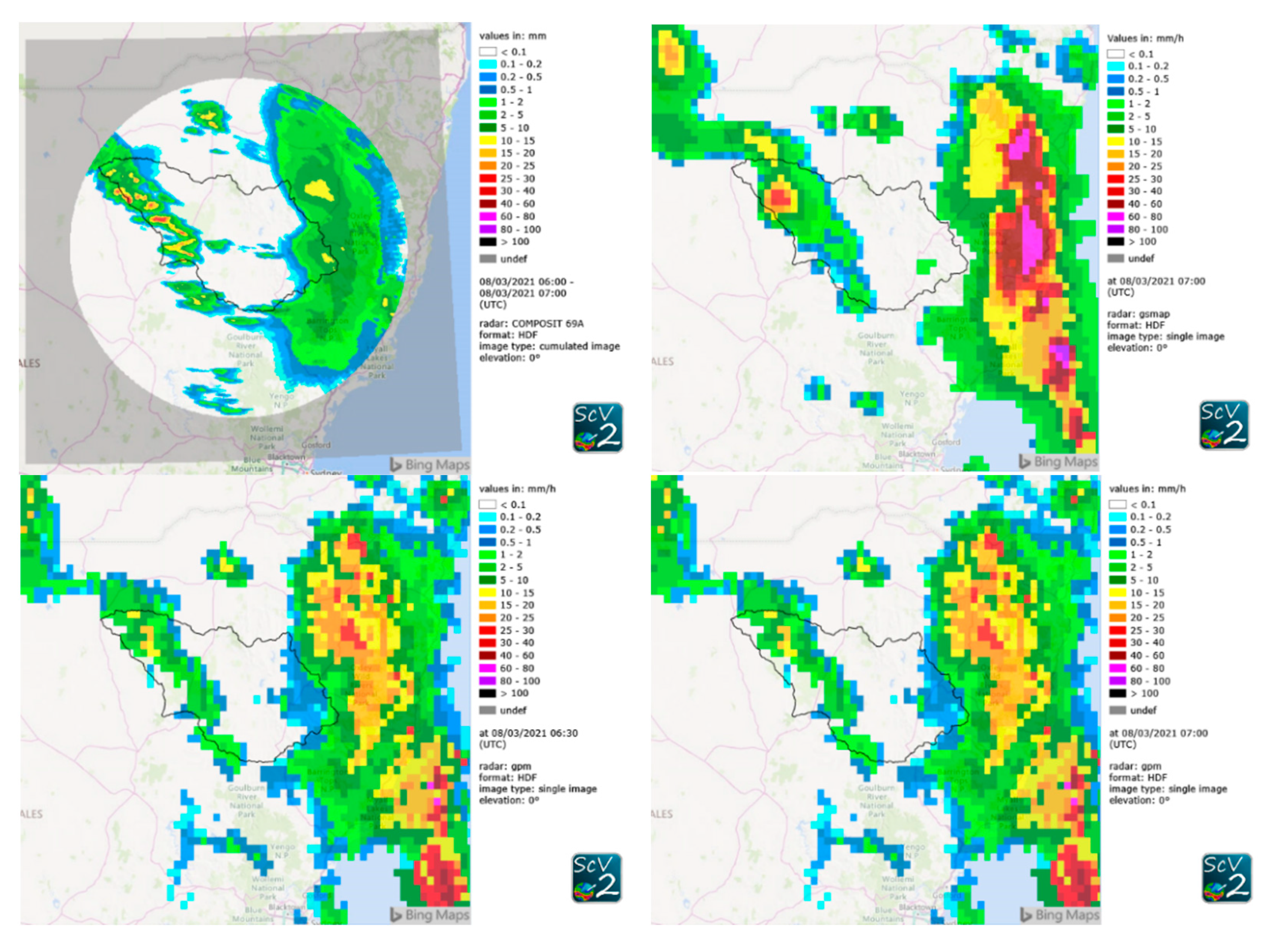
4.3. First Verification Results
5. Discussion or the Way Ahead
5.1. Benchmark
5.2. Method Extensions: Use of Soil Moisture Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Einfalt, T.; Frerk, I. On the influence of high quality rain gauge data for radar-based rainfall estimation. In Proceedings of the 12th ICUD, Porto Alegre, Brazil, 11–16 September 2011. [Google Scholar]
- Willems, P.; Einfalt, T. Sensors for rain measurements. In Metrology in Urban Drainage and Stormwater Management: Plug and Pray; IWA Publishing: London, UK, 2021; Volume 11, pp. 11–33. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Xie, P.; Yoo, S.H. Algorithm Theoretical Basis Document (ATBD) Version 06. NASA Global Precipitation Measurement (GPM) Integrated Multi-Satellite Retrievals for GPM (IMERG). 2019. Available online: https://pmm.nasa.gov/data-access/downloads/gpm (accessed on 4 December 2019).
- Kubota, T.; Aonashi, K.; Ushio, T.; Shige, S.; Takayabu, Y.N.; Kachi, M.; Arai, Y.; Tashima, T.; Masaki, T.; Kawamoto, N.; et al. Global Satellite Mapping of Precipitation (GSMaP) Products in the GPM Era. In Satellite Precipitation Measurement. Advances in Global Change Research; Levizzani, V., Kidd, C., Kirschbaum, D., Kummerow, C., Nakamura, K., Turk, F., Eds.; Springer: Cham, Switzerland, 2020; Volume 67, pp. 355–373. [Google Scholar] [CrossRef]
- Speirs, P.; Gabella, M.; Berne, A. A Comparison between the GPM Dual-Frequency Precipitation Radar and Ground-Based Radar Precipitation Rate Estimates in the Swiss Alps and Plateau. J. Hydrometeorol. 2017, 18, 1247–1269. [Google Scholar] [CrossRef]
- Joss, J.; Gabella, M.; Perona, G. Needs and expectations after the 1st VOLTAIRE workshop, Upscaling and consequences of non-homogeneous beam filling. In Proceedings of the 1st VOLTAIRE Workshop, Barcelona, Spain, 6–7 October 2003; pp. 6–8. [Google Scholar]
- Brocca, L.; Moramarco, T.; Melone, F.; Wagner, W. A new method for rainfall estimation through soil moisture observations. Geophys. Res. Lett. 2013, 40, 853–858. [Google Scholar] [CrossRef]
- Lanza, L.G.; Stagi, L. High resolution performance of catching type rain gauges from the laboratory phase of the WMO Field Intercomparison of Rain Intensity Gauges. Atmos. Res. 2009, 94, 555–563. [Google Scholar] [CrossRef]
- Sevruk, B. Niederschlag ALS Wasserkreislaufelement: Theorie und Praxis der Niederschlagsmessung; Boris Sevruk: Zürich, Switzerland, 2005. [Google Scholar]
- Kirstetter, P.E. Validating the Intrinsic Uncertainty: Implications for Hydrologic Applications; World Climate Research Programme: Geneva, Switzerland, 2021. [Google Scholar]
- NSW Department of Planning, Industry and Environment. Draft Regional Water Strategy—Namoi: Strategy. 2021. Available online: https://www.industry.nsw.gov.au/__data/assets/pdf_file/0009/354267/namoi-strategy.pdf (accessed on 17 September 2021).
- Einfalt, T.; Denoeux, T.; Jacquet, G. A radar rainfall forecasting method designed for hydrological purposes. J. Hydrol. 1990, 114, 229–244. [Google Scholar] [CrossRef]
- Gabella, M.; Notarpietro, R. Ground Clutter Characterization and Elimination in Mountainous Terrain. In Proceedings of the ERAD, Delft, The Netherlands, 18–22 November 2002; pp. 305–311. [Google Scholar]
- Bech, J.; Codina, B.; Lorente, J.; Bebbington, D. The Sensitivity of Single Polarization Weather Radar Beam Blockage Correction to Variability in the Vertical Refractivity Gradient. J. Atmos. Ocean. Technol. 2003, 20, 845–855. [Google Scholar] [CrossRef] [Green Version]
- Jasper-Tönnies, A.; Jessen, M. Improved radar QPE with temporal interpolation using an advection scheme. In Proceedings of the Eighth European Conference on Radar in Meteorology and Hydrology (ERAD), Garmisch-Partenkirchen, Germany, 3 August–1 September 2014. [Google Scholar]
- World Meteorological Organization. Guide to Meteorological Instruments and Methods of Observation, 7th ed.; WMO No. 8, Part II Observing Systems; WMO: Geneva, Switzerland, 2008; Chapter 9. [Google Scholar]
- Schellart, A.N.A.; Wang, L.; Onof, C. High resolution rainfall measurement and analysis in a small urban catchment. In Proceedings of the 9th International Workshop on Precipitation in Urban Areas: Urban Challenges in Rainfall Analysis (UrbanRain), St. Moritz, Switzerland, 6–9 December 2012. [Google Scholar]
- IPWG Global Precipitation Datasets. 2021. Available online: https://www.isac.cnr.it/~ipwg/data/datasets.html (accessed on 10 August 2021).
- Massari, C.; Camici, S.; Ciabatta, L.; Brocca, L. Exploiting satellite-based surface soil moisture for flood fore-casting in the Mediterranean area: State update versus rainfall correction. Remote Sens. 2018, 10, 292. [Google Scholar] [CrossRef] [Green Version]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring with Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2018, 57, 520–539. [Google Scholar] [CrossRef]
- Foucras, M.; Zribi, M.; Albergel, C.; Baghdadi, N.; Calvet, J.-C.; Pellarin, T. Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy. Water 2020, 12, 866. [Google Scholar] [CrossRef] [Green Version]
- Crow, W.T.; Huffman, G.J.; Bindlish, R.; Jackson, T.J. Improving Satellite-Based Rainfall Accumulation Estimates Using Spaceborne Surface Soil Moisture Retrievals. J. Hydrometeorol. 2009, 10, 199–212. [Google Scholar] [CrossRef] [Green Version]
- Pellarin, T.; Louvet, S.; Gruhier, C.; Quantin, G.; Legout, C. A simple and effective method for correcting soil moisture and precipitation estimates using AMSR-E measurements. Remote Sens. Environ. 2013, 136, 28–36. [Google Scholar] [CrossRef]
- Crow, W.T.; Berg, M.J.V.D.; Huffman, G.; Pellarin, T. Correcting rainfall using satellite-based surface soil moisture retrievals: The Soil Moisture Analysis Rainfall Tool (SMART). Water Resour. Res. 2011, 47, 576. [Google Scholar] [CrossRef]
- Pellarin, T.; Román-Cascón, C.; Baron, C.; Bindlish, R.; Brocca, L.; Camberlin, P.; Fernández-Prieto, D.; Kerr, Y.H.; Massari, C.; Panthou, G.; et al. The Precipitation Inferred from Soil Moisture (PrISM) Near Real-Time Rainfall Product: Evaluation and Comparison. Remote Sens. 2020, 12, 481. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prior October 2020 | After October 2020 | |
|---|---|---|
| Elevations | 0.5°, 0.9°, 1.3° and higher elevations not considered here | 0.5°, 0.8°, 1.4° and higher elevations not considered here |
| Azimut resolution | 1° | 1° |
| Radial resolution | 500 m | 250 m |
| Nominal radius | 300 km | 300 km |
| Reflectivity resolution | 159 dBZ-classes | 159 dBZ-classes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strehz, A.; Einfalt, T. Precipitation Data Retrieval and Quality Assurance from Different Data Sources for the Namoi Catchment in Australia. Geomatics 2021, 1, 417-428. https://doi.org/10.3390/geomatics1040024
Strehz A, Einfalt T. Precipitation Data Retrieval and Quality Assurance from Different Data Sources for the Namoi Catchment in Australia. Geomatics. 2021; 1(4):417-428. https://doi.org/10.3390/geomatics1040024
Chicago/Turabian StyleStrehz, Alexander, and Thomas Einfalt. 2021. "Precipitation Data Retrieval and Quality Assurance from Different Data Sources for the Namoi Catchment in Australia" Geomatics 1, no. 4: 417-428. https://doi.org/10.3390/geomatics1040024
APA StyleStrehz, A., & Einfalt, T. (2021). Precipitation Data Retrieval and Quality Assurance from Different Data Sources for the Namoi Catchment in Australia. Geomatics, 1(4), 417-428. https://doi.org/10.3390/geomatics1040024