


Numerical Modelling and Investigation of the Impact Behaviour of Single Guardrail Posts

Abstract
:1. Introduction
2. Methodology
3. Finite Element Model
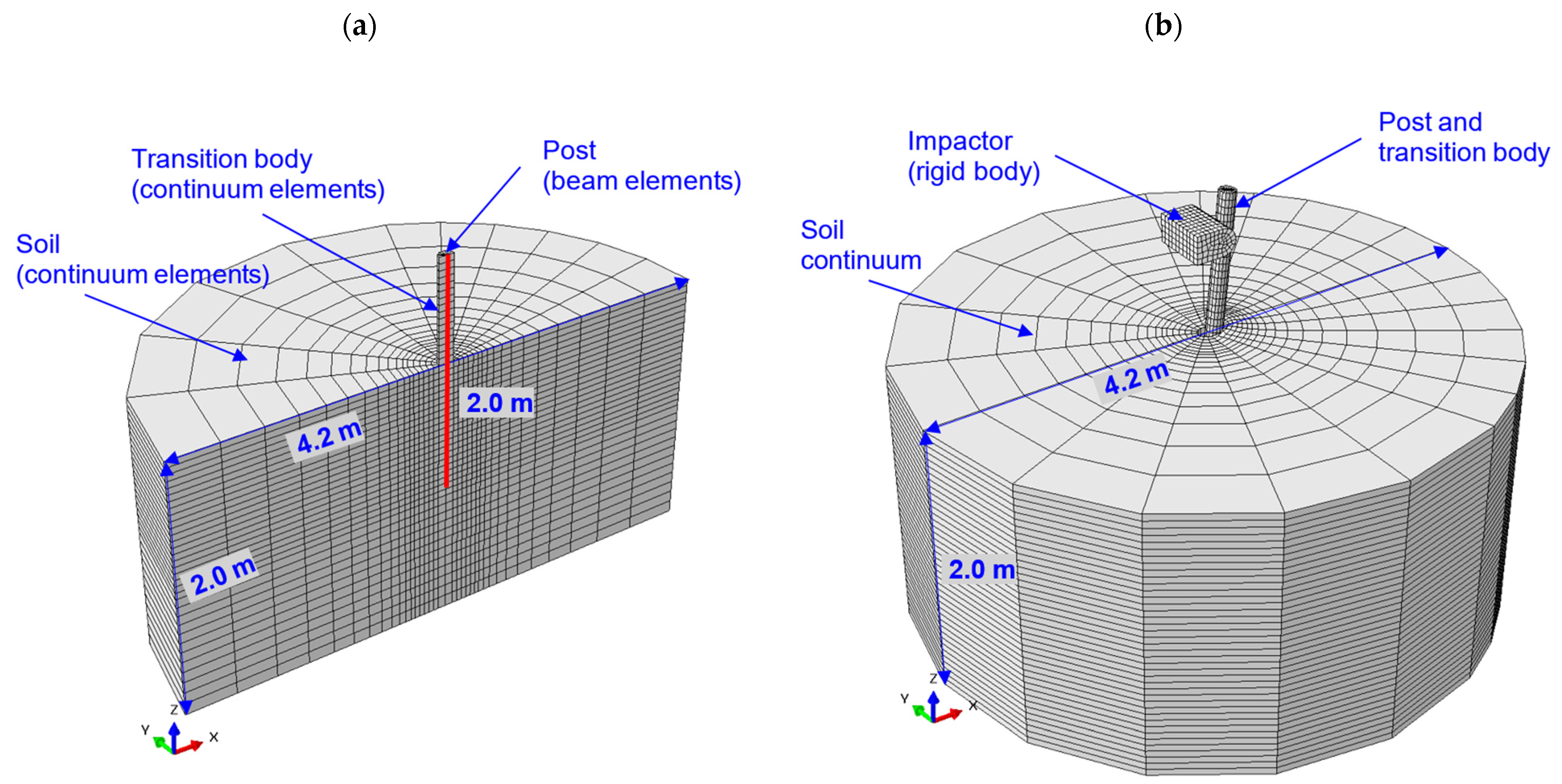
3.1. Model Geometry and Boundary Conditions
3.2. Calculation Phases
3.3. Material Models and Parameters Calibration
3.3.1. Hypoplastic Soil Model
3.3.2. Steel and Rubber Material Models
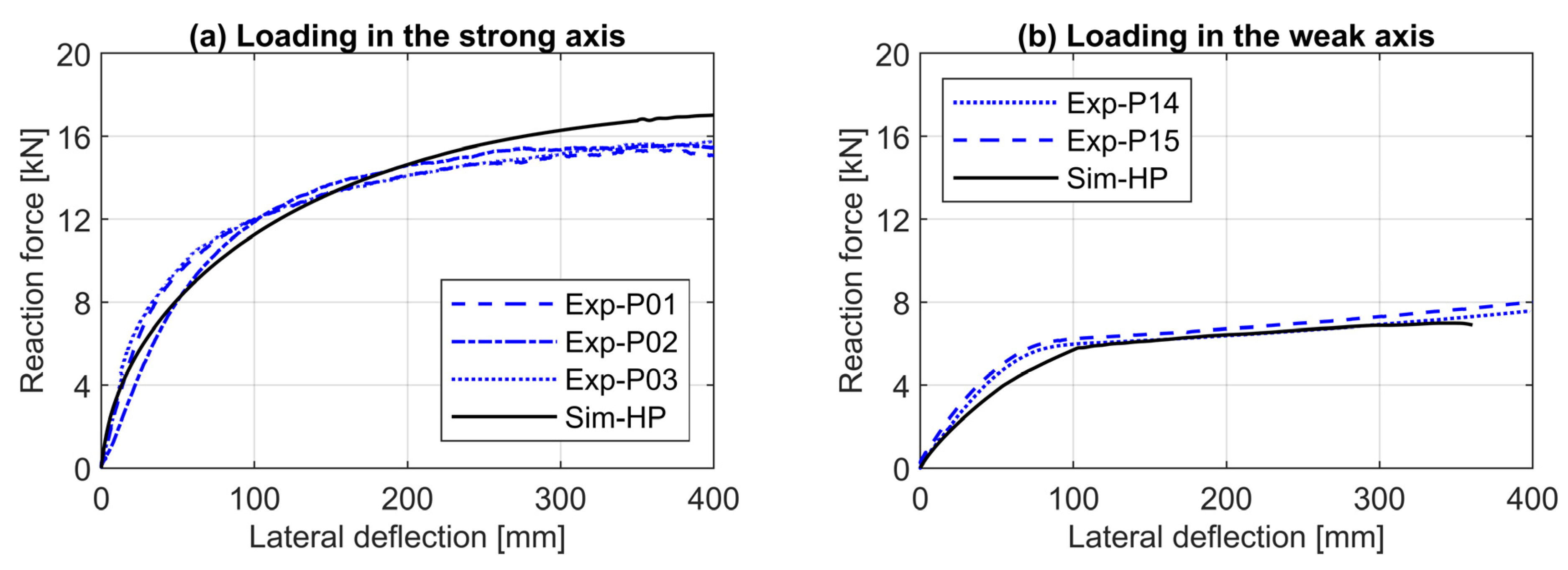
3.4. Validation of the FE Model
3.5. Parametric Study
- The range of relative density to is ideal for the post performance, since the absorbed energy in this range is relatively high while the impactor acceleration is still low. A higher relative density leads to fixation of the post and, consequently plastic yielding.
- Increasing the post embedment length beyond 1.0 m leads to a minor increase in the absorbed energy. However, decreasing the embedment by the same value leads to decreasing the absorbed energy significantly. The acceleration is nearly unaffected by the embedment length in the investigated embedment range.
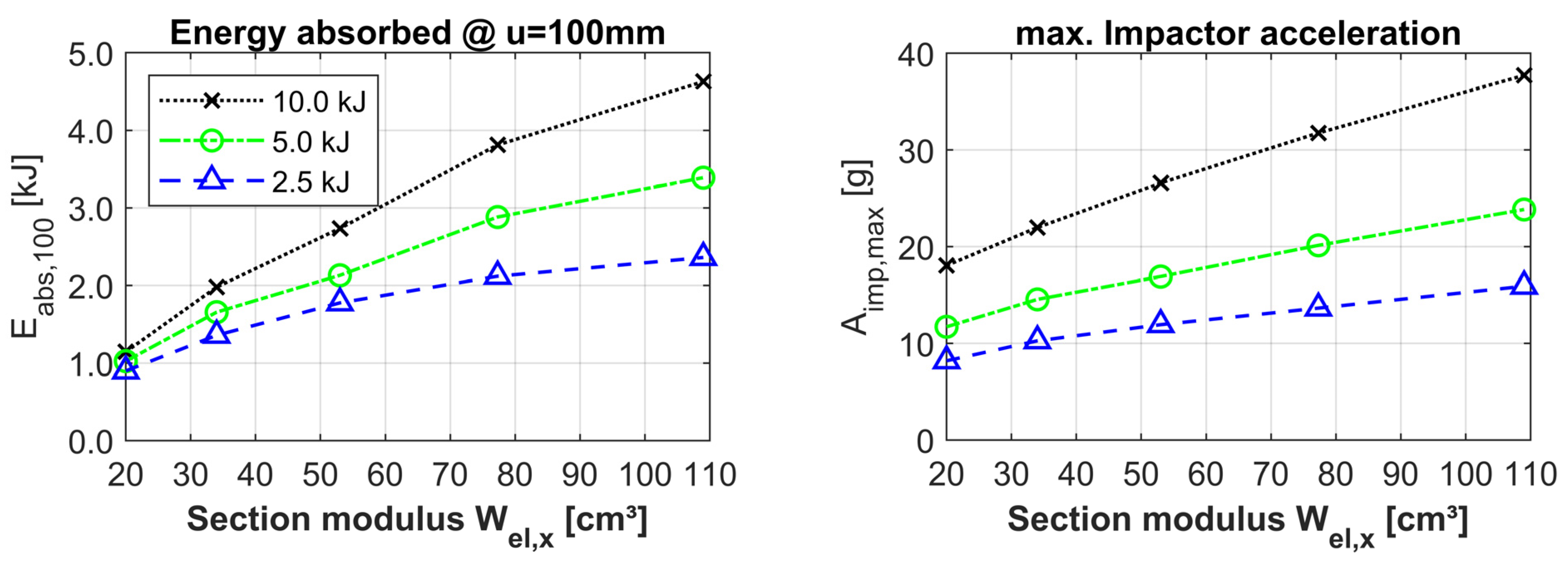
- Increasing the flexural rigidity, i.e., the section modulus of the post section, leads to an increase in the absorbed energy and the impactor acceleration simultaneously.
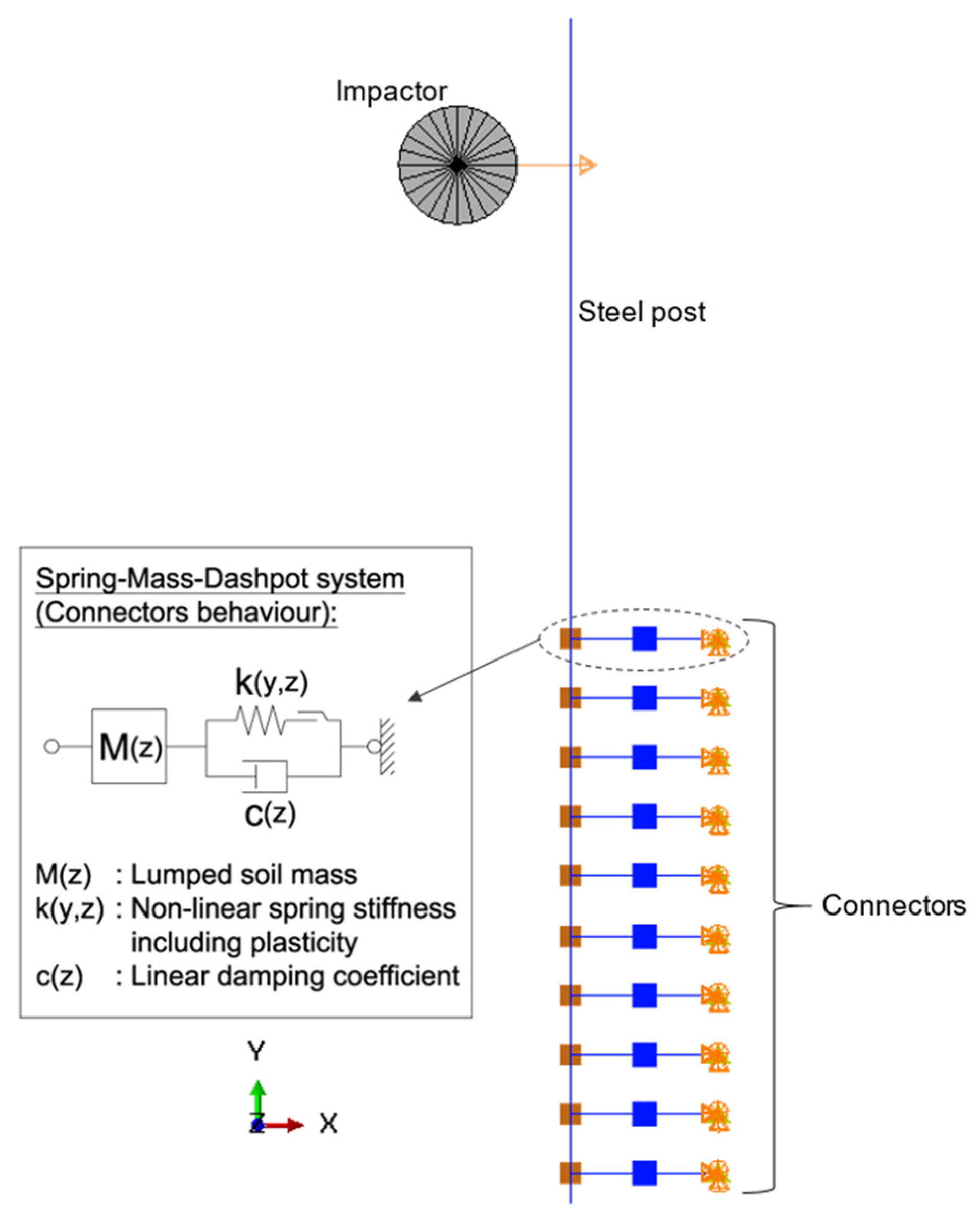
4. Development of a Lumped-Parameter Model for Guardrail Posts
4.1. Determination of the Model Parameters
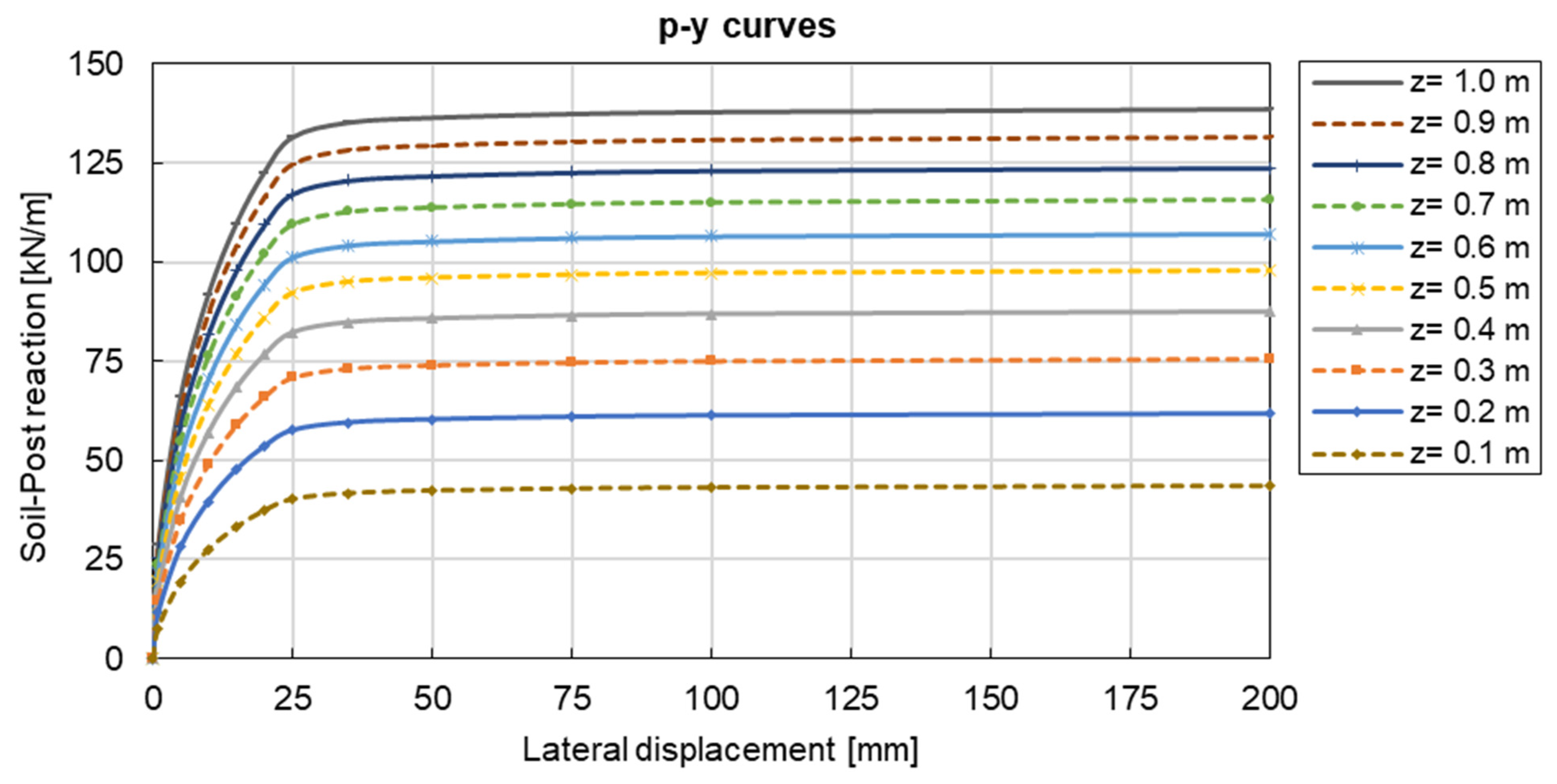
4.1.1. P–y Curve Function
4.1.2. Initial Subgrade Reaction Modulus
4.1.3. Ultimate Soil Pressure
4.1.4. Irreversible Soil Deformations
4.1.5. Soil Damping
4.1.6. Lumped Soil Mass
4.2. Lumped-Parameter Model Simulation Results
5. Discussion of the Simulation Models’ Performance
- Pearson correlation coefficient , which gauges the similarity in patterns between the simulated and the experimental data sets. The coefficient is calculated as the covariance of two variable populations divided by the product of their standard deviations, and is presented in the diagram on the azimuthal angle. A Pearson coefficient value close to 1 indicates the high agreement of the simulation model with the experimental observations.where is the number of discrete data points of the sample, is the simulated variable value at a given point, is the measured experimental value and and are the mean values of each sample, respectively. and are the standard deviations of the simulated and the experimental data samples.
- Root-mean-square error , which measures the difference between the simulated data and the observed data in terms of the root-mean-square error. Models close to the circle’s centre can simulate the observations with low error.
- Standard deviation , which measures the amount of dispersion of a data sample, i.e., simulation, from a mean value, i.e., experiment. In the TAYLOR diagram, the experimental data is set as the comparison sample data. Therefore, the of the experimental data is divided by itself and normalised .
6. Conclusions and Recommendations
- The numerical model of a guardrail post embedded in soil must account for the post installation method and the initial soil stress-state, as well as the large soil deformations and post deflections. The selected constitutive soil model must be capable of simulating the stress-state dependency of the strength and stiffness parameters, their distribution over depth and irreversible material deformations. The constitutive model for the steel post section must consider the strain-rate dependency of the material yield strength.
- The soil response can be modelled using the hypoplastic constitutive relation with one parameter set independent of the loading rate. This feature is crucial for VRS simulation in a crash test, since the posts experience different impact intensities.
- Compared with the conventional elasto-plastic models, the hypoplastic model parameter calibration is independent of the soil relative density in situ. No additional adjustment is required for the strength and stiffness parameters in the shallow embedment depth.
- The introduced LPM offers the same advantages as the FE hypoplastic continuum model, with a much higher computational efficiency and a simpler parameter calibration routine. The LPM can be implemented in any FE code, in which non-linear elasticity, plasticity, damping and mass points can be defined.
- The developed LPM shall be applied only for standard road-shoulder materials. Soils comprising a cohesive or organic content exceeding 12% cannot be analysed using this approach without further modifications.
- The soil relative density to range can be considered optimum for the post response, since the absorbed energy is relatively high and the impact force is low in this range. Posts with embedment lengths larger than 1.0 m exhibit a marginal effect on the absorbed energy. Increasing the post section modulus is very efficient in absorbing a higher impact energy with less deformations. However, the induced impact force increases as well, which can jeopardise the vehicle occupants’ safety.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth u. GL | Lumped Mass | Damping Coef. |
|---|---|---|
| z | M(z) | c(z) |
| [m] | [kg] | [kN.s/m] |
| 0.1 | 59.9 | 3.47 |
| 0.2 | 48.9 | 4.06 |
| 0.3 | 39.0 | 4.22 |
| 0.4 | 30.2 | 4.14 |
| 0.5 | 22.5 | 3.89 |
| 0.6 | 16.0 | 3.51 |
| 0.7 | 10.6 | 3.02 |
| 0.8 | 6.2 | 2.44 |
| 0.9 | 3.1 | 1.79 |
| 1.0 | 1.0 | 1.07 |
References
- Mašín, D. Modelling of Soil Behaviour with Hypoplasticity; Springer International Publishing: Cham, Switzerland, 2019; ISBN 978-3-030-03975-2. [Google Scholar]
- Ray, M.H.; Patzner, G.S. Finite-Element Model of Modified Eccentric Loader Terminal (MELT). Transp. Res. Rec. 1997, 1599, 11–21. [Google Scholar] [CrossRef]
- Soliman, M.; Rebstock, D.; Cudmani, R. Experimental investigation of the response of guardrail posts embedded in road shoulder material under quasi-static and dynamic impact loading. Transp. Geotech. 2023, 42, 101104. [Google Scholar] [CrossRef]
- Plaxico, C.A.; Patzner, G.S.; Ray, M.H. Finite-Element Modeling of Guardrail Timber Posts and the Post-Soil Interaction. Transp. Res. Rec. 1998, 1647, 139–146. [Google Scholar] [CrossRef]
- Habibagahi, K.; Langer, J.A. Horizontal Subgrade Modulus of Granular Soils. In Laterally Loaded Deep Foundations: Analysis and Performance; American Society for Testing and Materials: West Conshohocken, PA, USA, 1984; pp. 14–21. [Google Scholar] [CrossRef]
- Sassi, A.; Ghrib, F. Development of finite element model for the analysis of a guardrail post subjected to dynamic lateral loading. Int. J. Crashworthiness 2014, 19, 457–468. [Google Scholar] [CrossRef]
- Coon, B.A.; Reid, J.D.; Rohde, J.R. Dynamic Impact Testing of Guardrail Posts Embedded in Soil; Midwest Roadside Safety Facility, University of Nebraska: Lincoln, NE, USA, 1999. [Google Scholar]
- Sassi, A.; Ghrib, F. Crashworthiness of guardrail posts embedded in cohesionless soils: A parametric study. Int. J. Crashworthiness 2016, 21, 460–476. [Google Scholar] [CrossRef]
- Mojdeh, A.P.; Jean-Louis, B. TAMU-POST: An analysis tool for vehicle impact on in-line pile group. Cogent Eng. 2020, 7, 1735694. [Google Scholar] [CrossRef]
- Briaud, J.-L. SALLOP: Simple Approach for Lateral Loads on Piles. J. Geotech. Geoenviron. Eng. 1997, 123, 958–964. [Google Scholar] [CrossRef]
- LS-DYNA Keyword User’s Manual: Vol. II: Material Models; Livermore Software Technology Corp.: Livermore, CA, USA, 2018. [Google Scholar]
- Bligh, R.P.; Seckinger, N.R.; Abu-Odeh, A.Y.; Roschke, P.N.; Menges, W.L.; Haug, R.R. Dynamic Response of Guardrail Systems Encased in Pavement MOW Strips: FHWA/TX-04/0-4162-2; Texas Transportation Institute: Arlington, TX, USA, 2004. [Google Scholar]
- Wu, W.; Thomson, R. A study of the interaction between a guardrail post and soil during quasi-static and dynamic loading. Int. J. Impact Eng. 2007, 34, 883–898. [Google Scholar] [CrossRef]
- Woo, K.S.; Lee, D.W.; Ahn, J.S. Impact Behavior of a Laterally Loaded Guardrail Post near Slopes by Hybrid SPH Model. Adv. Civ. Eng. 2018, 2018, 9479452. [Google Scholar] [CrossRef]
- ABAQUS Analysis User’s Manual, Version 6. 17; Dassault Systèmes Simulia Corp.: Waltham, MA, USA, 2016. [Google Scholar]
- Wichtmann, T.; Triantafyllidis, T. On the correlation of “static” and “dynamic” stiffness moduli of non-cohesive soils. Bautechnik 2009, 86, 28–39. [Google Scholar] [CrossRef]
- DIN 4085:2017-08; Baugrund—Berechnung des Erddrucks. Deutsches Institut für Normung e.V. Beuth Verlag: Berlin, Germany, 2017.
- Von Wolffersdorff, P.-A. A hypoplastic relation for granular materials with a predefined limit state surface. Mech. Cohesive-Frict. Mater. 1996, 1, 251–271. [Google Scholar] [CrossRef]
- Niemunis, A.; Herle, I. Hypoplastic model for cohesionless soils with elastic strain range. Mech. Cohesive-Frict. Mater. 1997, 2, 279–299. [Google Scholar] [CrossRef]
- Herle, I.; Gudehus, G. Determination of parameters of a hypoplastic constitutive model from properties of grain assemblies. Mech. Cohesive-Frict. Mater. 1999, 4, 461–486. [Google Scholar] [CrossRef]
- Wichtmann, T. Kalibrierung der Parameter Eines Hypoplastischen Stoffmodells für Granulare Böden: Vorlesungsskript; Bauhaus-Universität Weimar: Weimar, Germany, 2018. [Google Scholar]
- DIN 18126:2022-10; Baugrund, Untersuchung von Bodenproben: Bestimmung der Dichte Nicht Bindiger Böden bei Lockerster und Dichtester Lagerung. Deutsche Gesellschaft für Geotechnik e.V. Beuth Verlag: Berlin, Germany, 2022.
- DIN 18127:2012-09; Baugrund, Untersuchung von Bodenproben—Proctorversuch, Deutsches Institut für Normung e.V. Beuth Verlag: Berlin, Germany, 2012.
- DIN EN ISO 17892-9:-07; Geotechnische Erkundung und Untersuchung—Laborversuche an Bodenproben: Teil_9: Konsolidierte Triaxiale Kompressionsversuche an Wassergesättigten Böden. Deutsches Institut für Normung e.V. Beuth Verlag: Berlin, Germany, 2018.
- Wright, A.E.; Ray, M.H. Characterizing Guardrail Steel for LS-DYNA3D Simulations. Transp. Res. Rec. 1996, 1528, 138–145. [Google Scholar] [CrossRef]
- Cowper, G.; Symonds, P. Strain-Hardening and Strain-Rate Effects in the Impact Loading of Cantilever Beams; Division of Applied Mathematics, Brown University: Providence, RI, USA, 1957. [Google Scholar]
- Phromjan, J.; Suvanjumrat, C. Material Properties of Natural Rubber Solid Tires for Finite Element Analysis. KEM 2018, 775, 560–564. [Google Scholar] [CrossRef]
- DIN EN 1317-1:2011-01; Rückhaltesysteme an Straßen: Teil_1: Terminologie und Allgemeine Kriterien für Prüfverfahren. Deutsches Institut für Normung e.V. Beuth Verlag: Berlin, Germany, 2011.
- Reese, L.C.; van Impe, W.F. Single Piles and Pile Groups under Lateral Loading, 2nd ed.; CRC Press/Balkema: Boca Raton, FL, USA, 2011; ISBN 9780415469883. [Google Scholar]
- Kondner, R.L. Hyperbolic Stress-Strain Response: Cohesive Soils. J. Soil Mech. Found. Div. 1963, 89, 115–143. [Google Scholar] [CrossRef]
- Reese, L.C.; Cox, W.R.; Koop, F.D. Analysis of laterally loaded piles in sand. In Proceedings of the VI Annual Offshore Technology Conference, Houston, TX, USA, 5–7 May 1974; OTC 2080. pp. 473–485. [Google Scholar]
- Empfehlungen des Arbeitskreises “Pfähle”. Deutsche Gesellschaft für Geotechnik e.V., 2. Auflage; Ernst & Sohn a Wiley Brand: Berlin, Germany, 2012; ISBN 978-3-433-03005-9. [Google Scholar]
- Empfehlungen des Arbeitsausschusses “Ufereinfassungen” Häfen und Wasserstraßen EAU. Deutsche Gesellschaft für Geotechnik e.V., 12. Auflage; Ernst Wilhelm & Sohn: Berlin, Germany, 2020; ISBN 978-3-433-03317-3. [Google Scholar]
- Lade, P. Triaxial Testing of Soils; Wiley Blackwell: Chichester, UK, 2016; ISBN 9781119106623. [Google Scholar]
- Bolton, M.D. The strength and dilatancy of sands. Géotechnique 1986, 36, 65–78. [Google Scholar] [CrossRef]
- Tak Kim, B.; Kim, N.K.; Jin Lee, W.; Su Kim, Y. Experimental Load–Transfer Curves of Laterally Loaded Piles in Nak-Dong River Sand. J. Geotech. Geoenviron. Eng. 2004, 130, 416–425. [Google Scholar] [CrossRef]
- Novak, M.; Aboul-Ella, F.; Nogami, T. Dynamic Soil Reactions for Plane Strain Case. J. Eng. Mech. Div. 1978, 104, 953–959. [Google Scholar] [CrossRef]
- Empfehlungen des Arbeitskreises “Baugrunddynamik”. Deutsche Gesellschaft für Geotechnik e.V., 2. Auflage; Ernst Wilhelm & Sohn: Berlin, Germany, 2017; ISBN 978-3-433-03210-7. [Google Scholar]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]









| Description | Parameter | Value | |
|---|---|---|---|
| Critical state friction angle | [◦] | 35.7 | |
| Poisson’s ratio | [-] | 0.35 | |
| Granulate hardness | [MPa] | 42 × 103 | |
| Exponent gran. hardness | [-] | 0.22 | |
| Initial minimum void ratio | [-] | 0.251 | |
| Initial critical void ratio | [-] | 0.614 | |
| Initial maximum void ratio | [-] | 0.706 | |
| Pycnotropy exponent | [-] | 0.108 | |
| Barometry exponent | [-] | 1.10 | |
| Max. value of intergranular strain | [-] | 1.0 × 10−4 | |
| Stiffness multiplier (180°) | [-] | 4.0 | |
| Stiffness multiplier (90°) | [-] | 2.0 | |
| Exponent IGS | βr | [-] | 0.1 |
| Exponent IGS | [-] | 1.0 | |
| Initial void ratio | e0 | [-] | 0.328 |
| Description | Parameter | Value | Steel Post IPE120 (S335) | |
|---|---|---|---|---|
| Elasticity modulus | [MPa] | 210.0 × 103 |  | |
| Poisson’s ratio | [-] | 0.28 | ||
| Density | [g/cm3] | 7.85 | ||
| Yield/Ultimate stress | [N/mm2] | 416/520 | ||
| Strain-rate multiplier | [s−1] | 40.4 | ||
| Strain-rate exponent | n | [-] | 5.0 | |
| Description | Parameter | Value | |
|---|---|---|---|
| P–y curves | |||
| Critical state friction angle | [◦] | 35.7 | |
| Relative density | [-] | 0.80 | |
| Soil effective weight | [kN/m3] | 21.3 | |
| Equivalent post diameter | [m] | 0.12 | |
| Ohde coefficient | [-] | 500 | |
| Ohde exponent | [-] | 0.7 | |
| Passive pressure mob. exponent | [-] | 1.5 | |
| Passive pressure mob. exponent | [-] | 0.7 | |
| P–y curve depth exponent | [-] | 0.5 | |
| Damping coefficient | |||
| Poisson’s ratio | [-] | 0.35 | |
| Soil unit weight | [t/m3] | 2.13 | |
| Small-strain stiffness ratio | [-] | 4.5 | |
| Novak damping parameter | [-] | 2.0 | |
| Damping reduction factor | [-] | 0.01 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soliman, M.; Cudmani, R. Numerical Modelling and Investigation of the Impact Behaviour of Single Guardrail Posts. Geotechnics 2023, 3, 1135-1161. https://doi.org/10.3390/geotechnics3040062
Soliman M, Cudmani R. Numerical Modelling and Investigation of the Impact Behaviour of Single Guardrail Posts. Geotechnics. 2023; 3(4):1135-1161. https://doi.org/10.3390/geotechnics3040062
Chicago/Turabian StyleSoliman, Mohamed, and Roberto Cudmani. 2023. "Numerical Modelling and Investigation of the Impact Behaviour of Single Guardrail Posts" Geotechnics 3, no. 4: 1135-1161. https://doi.org/10.3390/geotechnics3040062
APA StyleSoliman, M., & Cudmani, R. (2023). Numerical Modelling and Investigation of the Impact Behaviour of Single Guardrail Posts. Geotechnics, 3(4), 1135-1161. https://doi.org/10.3390/geotechnics3040062