
A Cellular-Automaton Model for Population-Density and Urban-Extent Dynamics at the Regional Level: The Case of Ukrainian Provinces


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area and Input Data
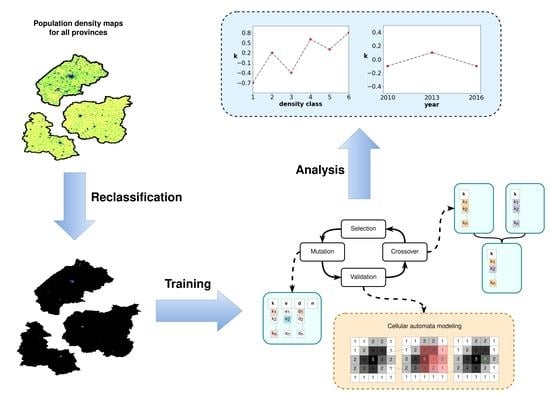
2.2. The Cellular-Automaton Model
2.3. Estimation of the Optimal Model Parameters
2.4. The Model’s Performance and Statistical Analysis
3. Results
3.1. The Model’s Performance: Predicting Population Densities
3.2. The Model’s Performance: Discriminating between Urban and Rural Areas
3.3. The Effects of Population Density and Time on the Models’ Parameters
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Province | Year | n | k1/d1/e1 | k2/d2/e2 | k3/d3/e3 | k4/d4/e4 | k5/d5/e5 | k6/d6/e6 |
|---|---|---|---|---|---|---|---|---|
| Dnipro | 2013 | 15 | −0.86/−10/0.93 | 0.36/−0.37/0.56 | 0.46/−1/0.65 | 0.18/−1/0.9 | 0.18/0.03/1 | 0.6/−1/10 |
| 2016 | 22 | −0.22/−10/0.41 | 0.02/−1/0.52 | 0.05/−0.5/0.74 | 0.06/−0.37/0.43 | 0.06/−0.91/0.95 | 0.29/−0.33/10 | |
| 2019 | 15 | −0.43/−10/0.88 | 0.03/−0.78/0.38 | −0.32/−0.78/0.63 | 0.31/−0.26/0.86 | 0.31/−0.68/1 | 0.16/−0.6/10 | |
| Donetsk | 2013 | 17 | −0.71/−10/0.26 | 0.34/−0.23/0.7 | 0.27/−0.36/0.7 | 0.02/−0.1/1 | 0.02/0.11/0.91 | 0.43/−0.76/10 |
| 2016 | 24 | −0.98/−10/0.58 | 0.62/−0.07/−0.33 | 0.09/−0.16/0.09 | 0.56/0.1/0.28 | 0.56/0.27/0.87 | 0.33/−0.78/10 | |
| 2019 | 21 | −0.27/−10/0.22 | 0.13/−0.84/0.42 | 0/−0.63/0.31 | 0.3/−0.53/0.26 | 0.3/−0.76/0.77 | 0.53/−0.56/10 | |
| Kharkiv | 2013 | 14 | −0.8/−10/0.68 | 0.28/−0.38/0.45 | 0.19/−0.97/0.82 | 0.36/−0.37/0.88 | 0.36/−1/1 | 0.57/−1/10 |
| 2016 | 11 | −0.84/−10/0.63 | 0.22/−0.35/0.26 | 0.22/−0.52/0.32 | 0.24/0.07/0.2 | 0.24/0.03/0.71 | 0.15/−0.21/10 | |
| 2019 | 14 | −1/−10/0.67 | 0.23/0.2/−0.69 | 0.39/0.69/0.56 | 0.3/−0.55/0.89 | 0.3/−0.35/0.61 | −0.03/−0.24/10 | |
| Kyiv | 2013 | 30 | −0.72/−10/0.36 | 0.3/−0.32/0.47 | −0.28/−0.92/0.51 | 0.08/−1/0.41 | 0.08/−0.99/0.25 | 0.06/−0.16/10 |
| 2016 | 17 | −0.64/−10/0.38 | 0.06/−0.34/1 | −0.22/−0.77/0.75 | 0.74/−0.22/0.97 | 0.74/−1/0.29 | 0.5/−0.48/10 | |
| 2019 | 22 | −1/−10/0.49 | 0.31/−0.69/0.37 | 0.32/−0.55/0.45 | 0.3/−0.55/0.6 | 0.3/−0.9/1 | 0.18/−1/10 | |
| Luhansk | 2013 | 7 | −0.95/−10/0.29 | 0.17/−0.49/0.66 | 0.11/−0.56/0.71 | 0.62/−0.02/1 | 0.62/−0.08/0.9 | 0.57/0.66/10 |
| 2016 | 24 | −1/−10/0.21 | 0.37/−0.32/0.04 | 0.05/−0.05/−0.03 | 0.62/0.38/1 | 0.62/−0.2/0.89 | 0.88/0.88/10 | |
| 2019 | 16 | −0.76/−10/0.6 | 0.12/−0.68/0.54 | 0.29/−1/0.56 | 0.39/−1/0.64 | 0.39/−0.26/0.57 | 0.39/−0.72/10 | |
| Lviv | 2013 | 22 | −0.9/−10/0.21 | 0.06/−0.51/0.25 | −0.22/−0.11/0.54 | 0.08/−0.86/0.29 | 0.08/−0.16/0.92 | 0.31/−0.61/10 |
| 2016 | 18 | −0.84/−10/0.63 | 0.25/−0.43/1 | 0.27/−0.67/0.75 | 0.37/0.06/0.79 | 0.37/−0.12/−0.89 | 0.46/0.57/10 | |
| 2019 | 15 | −1/−10/0.32 | 0.04/−0.86/0.42 | 0.29/−1/0.77 | 0.38/−0.66/0.97 | 0.38/−0.74/0.91 | 0.42/−0.76/10 | |
| Cherskasy | 2013 | 20 | −0.82/−10/−0.17 | −0.6/−0.75/0.16 | −0.72/−0.9/0.22 | 0.23/−0.69/1 | 0.23/−0.65/0.77 | 0.29/−0.35/10 |
| 2016 | 20 | −0.9/−10/0.48 | −0.6/−0.85/0.16 | −0.46/−1/0.65 | 0.91/−1/0.17 | 0.91/−0.86/0.83 | 0.3/−0.87/10 | |
| 2019 | 8 | −0.9/−10/0.53 | 0.08/−0.86/0.15 | −1/−1/0.09 | 0.01/−0.09/0.05 | 0.01/−0.92/0.46 | −0.18/0.96/10 | |
| Chernivtsi | 2013 | 10 | −0.9/−10/0.69 | −0.23/−0.8/0.59 | 0.2/−1/0.39 | 0.13/−0.74/0.2 | 0.13/−0.05/0.45 | 0.95/−0.48/10 |
| 2016 | 24 | −0.9/−10/0.31 | −0.73/−0.85/−0.28 | −0.23/−0.92/0.48 | 0.26/−0.03/−0.85 | 0.26/−0.38/0.38 | 0.44/0.48/10 | |
| 2019 | 20 | −0.9/−10/0.33 | −0.38/−0.87/0.18 | −0.16/−0.77/−0.41 | 0.01/0.24/0.28 | 0.01/−0.64/0.95 | 0.43/−0.55/10 | |
| Chernihiv | 2013 | 17 | −0.67/−10/0.13 | −0.34/−1/0.63 | −0.01/−0.84/−0.11 | 0.13/−1/0.28 | 0.13/−0.76/−0.08 | 0.36/−0.68/10 |
| 2016 | 15 | −0.9/−10/1 | −0.53/−0.8/0.28 | −0.34/−1/0.19 | 0.17/−0.71/0.59 | 0.17/−0.48/0.93 | 0.44/−0.58/10 | |
| 2019 | 20 | −1/−10/0.49 | 0.30/−0.69/0.37 | 0.32/−0.55/0.45 | 0.2/−0.55/0.6 | 0.3/−0.91/1 | 0.18/−1/10 | |
| Kherson | 2013 | 12 | −0.85/−10/0.27 | −0.57/−0.82/0.25 | −0.05/−0.76/0.5 | 0.3/−0.69/0.65 | 0.3/−0.07/−0.32 | −0.03/1/10 |
| 2016 | 11 | −0.9/−10/0.83 | −0.34/−0.82/0.15 | 0.26/−1/1 | 0/−0.33/1 | 0/−0.97/0.93 | 0.01/−0.83/10 | |
| 2019 | 10 | −1/−10/1 | −0.6/−0.88/0.08 | −0.05/−0.67/0.03 | −0.28/−0.65/0.43 | −0.28/0.96/0.75 | 0.57/−0.65/10 | |
| Ivano-Frankivsk | 2013 | 9 | −0.64/−10/0.11 | −0.39/−0.98/−0.14 | −0.3/−0.9/0.01 | 0.09/−0.62/0.4 | 0.09/−0.88/0.31 | 0.13/−0.56/10 |
| 2016 | 13 | −0.9/−10/0.11 | −0.6/−0.79/0.25 | 0.06/−1/0.51 | 0.3/−1/0.23 | 0.3/−0.68/0.7 | 0.6/−0.04/10 | |
| 2019 | 13 | −0.93/−10/−0.01 | −0.6/−0.82/0.41 | −0.02/−0.61/0.36 | −0.17/−0.76/0.29 | −0.17/−0.76/0.03 | 0.76/−0.7/10 | |
| Khmelnitsky | 2013 | 19 | −1/−10/−0.11 | −0.53/−0.85/0.13 | 0.27/−1/0.15 | 0.29/−0.75/0.21 | 0.29/−0.64/0.77 | 0.6/−0.73/10 |
| 2016 | 17 | −1/−10/0.3 | −0.38/−0.79/0.25 | −0.58/−0.51/1 | 0.85/−0.97/0.56 | 0.85/−0.56/0.91 | 0.59/−0.73/10 | |
| 2019 | 20 | −1/−10/0.4 | −0.32/−0.81/−0.07 | −0.11/−1/0.14 | −0.15/−0.83/0.52 | −0.15/−0.86/0.53 | 0.25/−0.56/10 | |
| Kirovohrad | 2013 | 27 | −0.95/−10/0.67 | −0.59/−0.85/0.05 | 0.13/−1/0.44 | −0.08/−1/1 | −0.08/−0.62/0.97 | 0.45/−0.55/10 |
| 2016 | 30 | −0.9/−10/1 | −0.6/−0.86/0.38 | −0.38/−0.73/−0.6 | 0.2/0.74/0.36 | 0.2/−1/0.67 | 0.51/0.13/10 | |
| 2019 | 20 | −0.95/−10/0.16 | −0.46/−1/−0.16 | −0.2/−0.59/0.31 | 0.15/−0.52/0.86 | 0.15/−0.88/0.59 | 0.39/−0.76/10 | |
| Mykolaiv | 2013 | 18 | −0.82/−10/−0.07 | −0.69/−1/0.14 | −0.77/−1/0.23 | −0.03/−0.86/0.43 | −0.03/−0.57/0.41 | 0.36/−0.71/10 |
| 2016 | 28 | −0.9/−10/0.65 | −0.57/−0.82/0.29 | −0.22/0.04/0.01 | −0.14/−0.27/0.45 | −0.14/−0.94/0.69 | 0.25/−0.78/10 | |
| 2019 | 18 | −0.76/−10/0.63 | −0.52/−1/0.55 | −0.17/−0.39/0.36 | 0.35/−0.19/−0.52 | 0.35/0.02/0.88 | 0.71/−0.48/10 | |
| Odessa | 2013 | 13 | −0.81/−10/0.9 | −0.21/−0.73/0.39 | 0.4/−1/0.36 | 0.24/−0.7/0.27 | 0.24/−0.55/0.58 | 0.14/−0.97/10 |
| 2016 | 16 | −0.93/−10/0.37 | −0.6/−0.77/−0.04 | −0.72/−0.11/0.16 | 0.76/0.47/0.64 | 0.76/0.51/0.48 | 0.68/0.94/10 | |
| 2019 | 8 | −0.97/−10/0.3 | −0.32/−0.75/0.56 | 0.13/−0.1/0.46 | 0.85/−1/0.37 | 0.85/−0.6/0.69 | −0.25/−1/10 | |
| Poltava | 2013 | 9 | −0.94/−10/0.77 | −0.44/−0.92/0.41 | −0.27/−0.79/0.46 | 0.28/−0.46/0.38 | 0.28/−0.6/1 | 0.29/−1/10 |
| 2016 | 12 | −0.9/−10/0.03 | −0.69/−0.87/−0.49 | −0.22/0.15/0.35 | −0.08/−1/0.16 | −0.08/−1/0.8 | 0.49/0.28/10 | |
| 2019 | 14 | −1/−10/0.7 | −0.49/−0.8/0.32 | −0.01/−1/0.21 | 0.27/−0.88/0.71 | 0.27/−0.71/−0.41 | 0.39/0.89/10 | |
| Rivne | 2013 | 17 | −0.9/−10/0.59 | −0.42/−0.86/0.23 | −0.3/−0.78/0.34 | 0.13/−0.86/0.49 | 0.13/−0.51/0.64 | 0.51/−0.72/10 |
| 2016 | 22 | −1/−10/−0.2 | −0.28/−0.73/0.03 | −0.46/−1/0 | 0.18/−1/0.23 | 0.18/0.11/−1 | 0.07/0.55/10 | |
| 2019 | 25 | −0.9/−10/−0.15 | −0.41/−0.75/0.56 | −0.4/−1/0.42 | 0.21/−0.79/−0.04 | 0.21/−0.83/0.33 | 0.46/−0.81/10 | |
| Sumy | 2013 | 21 | −0.62/−10/0.24 | −0.6/−0.92/0.58 | −0.21/−0.6/0.69 | 0.6/−0.7/0.11 | 0.6/−0.69/0.85 | 0.46/−0.55/10 |
| 2016 | 17 | −0.91/−10/0.24 | −0.21/−0.88/−0.13 | 0.09/−0.63/0.73 | 0.3/−0.48/−0.04 | 0.3/−0.94/0.69 | −0.07/−0.73/10 | |
| 2019 | 20 | −0.9/−10/0.76 | −0.31/−0.74/−0.02 | −0.41/−0.67/0.88 | 0.35/−0.89/0.65 | 0.35/0.57/0.98 | 0.41/−0.97/10 | |
| Ternopil | 2013 | 20 | −0.48/−10/0.95 | −0.27/−0.92/0.53 | 0.19/−0.82/0.77 | 0.62/−0.3/0.51 | 0.62/−0.62/0.61 | 0.39/−0.7/10 |
| 2016 | 24 | −1/−10/−0.37 | −0.6/−0.87/0.1 | 0.1/−0.44/−0.04 | 0.13/−0.79/0.54 | 0.13/0.02/−0.96 | 0.55/0.23/10 | |
| 2019 | 18 | −0.88/−10/0.2 | −0.43/−0.79/−0.01 | −0.59/−1/0.46 | 0.03/−0.75/0.53 | 0.03/−0.39/0.71 | 0.21/−0.7/10 | |
| Vinnitsa | 2013 | 23 | −0.9/−10/0.27 | −0.59/−0.85/0.18 | −0.46/−1/0.31 | 0.29/−1/−0.15 | 0.29/−0.52/0.12 | 0.15/−1/10 |
| 2016 | 10 | −1/−10/−0.01 | −0.65/−0.88/0.19 | −0.78/−0.69/0.24 | 0.4/−0.68/0.65 | 0.4/−0.9/0.97 | 0.08/−1/10 | |
| 2019 | 12 | −1/−10/0.88 | −0.5/−0.83/0.27 | −0.66/−0.79/0.06 | 0.55/−0.81/0.81 | 0.55/−0.88/0.89 | 0.5/0.91/10 | |
| Volyn | 2013 | 28 | −1/−10/0.45 | −0.44/−0.93/−0.02 | −0.37/−0.66/0.02 | 0.14/−1/0.84 | 0.14/−0.68/0.86 | 0.27/−0.79/10 |
| 2016 | 18 | −0.9/−10/0.44 | −0.24/−0.89/0.35 | 0.02/−0.89/0.2 | 0.4/−1/0.71 | 0.4/−0.55/0.87 | 0.8/−0.57/10 | |
| 2019 | 13 | −0.91/−10/0.57 | −0.6/−0.8/0.23 | −0.51/−0.91/0.28 | 0.38/−0.64/0.4 | 0.38/−0.86/0.64 | 0.6/−0.61/10 | |
| Zakarpattia | 2013 | 13 | −0.66/−10/−0.11 | −0.6/−0.65/−0.02 | −0.27/−0.87/0.18 | 0.3/−0.91/0.89 | 0.3/−0.8/0.35 | 0.49/−0.45/10 |
| 2016 | 7 | −0.91/−10/0.1 | −0.47/−0.75/−0.16 | −0.05/−0.52/0.57 | 0.02/−1/0.21 | 0.02/−0.89/0.86 | 0.11/−0.73/10 | |
| 2019 | 23 | −0.65/−10/0.31 | 0.03/−0.99/0.37 | −0.18/−0.59/0.71 | 0.3/−1/0.47 | 0.3/−0.39/1 | 0.42/−0.4/10 | |
| Zaporizhzhia | 2013 | 10 | −1/−10/0.91 | −0.46/−0.92/0.92 | −0.13/−0.97/−0.73 | 0.46/0.96/0.68 | 0.46/−0.69/−0.39 | 0.79/0.99/10 |
| 2016 | 24 | −0.71/−10/0.7 | −0.39/−1/0.77 | 0.02/−0.6/0.36 | 0.17/−0.32/0.53 | 0.17/−0.36/0.47 | 0.39/−0.33/10 | |
| 2019 | 25 | −0.41/−10/−0.06 | −0.22/−1/0.14 | −0.12/−0.9/0.11 | 0.05/−0.43/0.39 | 0.05/−0.41/0.64 | 0.05/−0.91/10 | |
| Zhytomyr | 2013 | 12 | −0.9/−10/0.82 | −0.53/−0.85/0.45 | −0.04/−0.82/1 | −0.08/−0.76/0.4 | −0.08/−0.58/0.21 | 0.44/−0.63/10 |
| 2016 | 17 | −1/−10/0.85 | −0.55/−0.86/−0.18 | −0.29/−1/0.16 | 0.18/−0.73/0.83 | 0.18/−0.38/0.74 | 0.12/−0.63/10 | |
| 2019 | 20 | −0.52/−10/−0.15 | −0.54/−1/1 | 0.18/−1/0.45 | −0.05/−0.84/0.24 | −0.05/−0.43/0.94 | 0.35/−0.3/10 |
| Province | Year | Adj. Acc. | Kappa Coef. | Kappa Coef. by Urban Threshold (Persons/km2) | Jaccard Index by Urban Threshold (Persons/km2) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| >1000 | >2000 | >3000 | >4000 | >5000 | >1000 | >2000 | >3000 | >4000 | >5000 | ||||
| Dnipro | 2013 | 0.821 | 0.8 | 0.879 | 0.930 | 0.911 | 0.874 | 0.898 | 0.785 | 0.870 | 0.838 | 0.776 | 0.816 |
| 2016 | 0.946 | 0.957 | 0.983 | 0.985 | 0.983 | 0.966 | 0.961 | 0.967 | 0.971 | 0.966 | 0.934 | 0.924 | |
| 2019 | 0.972 | 0.981 | 0.995 | 0.996 | 0.975 | 0.996 | 0.975 | 0.990 | 0.993 | 0.952 | 0.993 | 0.951 | |
| Donetsk | 2013 | 0.705 | 0.554 | 0.650 | 0.823 | 0.611 | 0.770 | 0.897 | 0.484 | 0.701 | 0.441 | 0.626 | 0.813 |
| 2016 | 0.514 | 0.215 | 0.284 | 0.411 | 0.477 | 0.569 | 0.691 | 0.167 | 0.260 | 0.314 | 0.398 | 0.528 | |
| 2019 | 0.994 | 0.99 | 0.993 | 0.995 | 0.998 | 1.000 | 0.996 | 0.987 | 0.989 | 0.997 | 1.000 | 0.991 | |
| Kharkiv | 2013 | 0.923 | 0.822 | 0.855 | 0.931 | 0.956 | 0.988 | 0.982 | 0.748 | 0.871 | 0.916 | 0.976 | 0.964 |
| 2016 | 0.826 | 0.799 | 0.875 | 0.944 | 0.902 | 0.927 | 0.957 | 0.780 | 0.894 | 0.822 | 0.865 | 0.917 | |
| 2019 | 0.987 | 0.96 | 0.966 | 0.989 | 0.995 | 0.995 | 0.966 | 0.934 | 0.978 | 0.989 | 0.990 | 0.934 | |
| Kyiv | 2013 | 0.663 | 0.725 | 0.873 | 0.939 | 0.948 | 0.929 | 0.803 | 0.776 | 0.885 | 0.901 | 0.868 | 0.671 |
| 2016 | 0.779 | 0.81 | 0.911 | 0.962 | 0.944 | 0.932 | 0.962 | 0.838 | 0.927 | 0.894 | 0.873 | 0.928 | |
| 2019 | 0.96 | 0.954 | 0.973 | 0.983 | 0.991 | 0.990 | 0.986 | 0.948 | 0.966 | 0.982 | 0.980 | 0.973 | |
| Luhansk | 2013 | 0.676 | 0.568 | 0.677 | 0.851 | 0.758 | 0.857 | 0.000 | 0.514 | 0.741 | 0.611 | 0.750 | 0.000 |
| 2016 | 0.346 | 0.251 | 0.373 | 0.508 | 0.622 | 0.598 | 0.000 | 0.230 | 0.341 | 0.452 | 0.427 | 0.000 | |
| 2019 | 0.975 | 0.967 | 0.980 | 0.986 | 0.989 | 0.980 | 0.957 | 0.960 | 0.972 | 0.978 | 0.960 | 0.917 | |
| Lviv | 2013 | 0.616 | 0.537 | 0.665 | 0.857 | 0.883 | 0.877 | 0.841 | 0.499 | 0.750 | 0.790 | 0.780 | 0.726 |
| 2016 | 0.892 | 0.741 | 0.782 | 0.981 | 0.965 | 0.974 | 0.945 | 0.644 | 0.963 | 0.932 | 0.950 | 0.897 | |
| 2019 | 0.998 | 0.912 | 0.913 | 0.998 | 1.000 | 1.000 | 1.000 | 0.841 | 0.996 | 1.000 | 1.000 | 1.000 | |
| Cherskasy | 2013 | 0.745 | 0.694 | 0.816 | 0.891 | 0.905 | 0.907 | 0.906 | 0.690 | 0.803 | 0.827 | 0.830 | 0.828 |
| 2016 | 0.972 | 0.823 | 0.839 | 0.991 | 0.980 | 1.000 | 1.000 | 0.723 | 0.981 | 0.962 | 1.000 | 1.000 | |
| 2019 | 0.477 | 0.794 | 0.983 | 1.000 | 0.784 | 1.000 | 0.000 | 0.967 | 1.000 | 0.645 | 1.000 | 0.000 | |
| Chernivtsi | 2013 | 0.744 | 0.767 | 0.835 | 0.917 | 0.943 | 0.944 | 0.615 | 0.719 | 0.848 | 0.893 | 0.895 | 0.444 |
| 2016 | 0.809 | 0.798 | 0.874 | 0.940 | 0.981 | 0.872 | 0.842 | 0.777 | 0.887 | 0.963 | 0.773 | 0.727 | |
| 2019 | 0.92 | 0.952 | 0.976 | 0.990 | 0.981 | 0.952 | 0.952 | 0.954 | 0.980 | 0.963 | 0.909 | 0.909 | |
| Chernihiv | 2013 | 0.847 | 0.801 | 0.883 | 0.878 | 0.972 | 0.867 | 0.979 | 0.791 | 0.783 | 0.945 | 0.765 | 0.958 |
| 2016 | 0.945 | 0.866 | 0.887 | 0.995 | 0.956 | 0.986 | 1.000 | 0.797 | 0.989 | 0.915 | 0.971 | 1.000 | |
| 2019 | 0.96 | 0.912 | 1.000 | 0.994 | 1.000 | 1.000 | 1.000 | 1.000 | 0.989 | 1.000 | 1.000 | 1.000 | |
| Kherson | 2013 | 1 | 1 | 0.958 | 0.996 | 0.962 | 0.989 | 0.932 | 0.920 | 0.993 | 0.927 | 0.978 | 0.873 |
| 2016 | 0.86 | 0.901 | 0.821 | 0.701 | 0.675 | 0.634 | 0.513 | 0.698 | 0.541 | 0.510 | 0.464 | 0.345 | |
| 2019 | 0.644 | 0 | 0.983 | 0.992 | 1.000 | 1.000 | 0.962 | 0.968 | 0.985 | 1.000 | 1.000 | 0.926 | |
| Ivano-Frankivsk | 2013 | 0.969 | 0.621 | 0.787 | 0.914 | 0.878 | 0.947 | 0.000 | 0.652 | 0.843 | 0.783 | 0.900 | 0.000 |
| 2016 | 0.681 | 0.698 | 0.773 | 0.837 | 0.962 | 0.964 | 0.889 | 0.633 | 0.720 | 0.927 | 0.931 | 0.800 | |
| 2019 | 0.881 | 0.727 | 0.833 | 0.987 | 1.000 | 1.000 | 1.000 | 0.715 | 0.975 | 1.000 | 1.000 | 1.000 | |
| Khmelnitsky | 2013 | 1 | 0.829 | 0.905 | 0.924 | 0.938 | 0.862 | 0.919 | 0.827 | 0.858 | 0.883 | 0.758 | 0.850 |
| 2016 | 0.813 | 0.831 | 0.913 | 0.800 | 0.959 | 0.895 | 0.900 | 0.841 | 0.667 | 0.921 | 0.811 | 0.818 | |
| 2019 | 0.816 | 0.802 | 0.961 | 0.975 | 0.992 | 0.986 | 0.977 | 0.926 | 0.952 | 0.984 | 0.973 | 0.955 | |
| Kirovohrad | 2013 | 0.97 | 0.939 | 0.980 | 0.957 | 0.937 | 0.980 | 0.923 | 0.960 | 0.918 | 0.882 | 0.962 | 0.857 |
| 2016 | 0.899 | 0.93 | 0.562 | 0.816 | 0.886 | 0.731 | 0.526 | 0.391 | 0.690 | 0.796 | 0.576 | 0.357 | |
| 2019 | 0.683 | 0.473 | 0.997 | 1.000 | 0.977 | 0.980 | 0.000 | 0.994 | 1.000 | 0.955 | 0.960 | 0.000 | |
| Mykolaiv | 2013 | 0.814 | 0.947 | 0.660 | 0.692 | 0.764 | 0.805 | 0.833 | 0.494 | 0.530 | 0.619 | 0.674 | 0.714 |
| 2016 | 0.718 | 0.559 | 0.968 | 0.828 | 0.739 | 0.800 | 0.833 | 0.939 | 0.707 | 0.587 | 0.667 | 0.714 | |
| 2019 | 0.77 | 0.843 | 0.966 | 1.000 | 0.995 | 0.993 | 0.991 | 0.935 | 1.000 | 0.989 | 0.986 | 0.982 | |
| Odessa | 2013 | 0.975 | 0.959 | 0.268 | 0.090 | 0.000 | 0.000 | 0.000 | 0.157 | 0.049 | 0.000 | 0.000 | 0.000 |
| 2016 | 0.996 | 0.192 | 0.912 | 0.826 | 0.962 | 0.831 | 0.454 | 0.840 | 0.704 | 0.927 | 0.711 | 0.294 | |
| 2019 | 0.669 | 0.755 | 0.980 | 0.989 | 0.984 | 0.988 | 0.990 | 0.961 | 0.978 | 0.969 | 0.977 | 0.981 | |
| Poltava | 2013 | 0.963 | 0.957 | 0.965 | 0.744 | 0.731 | 0.765 | 0.694 | 0.933 | 0.593 | 0.576 | 0.620 | 0.531 |
| 2016 | 0.679 | 0.754 | 0.924 | 0.972 | 0.940 | 0.782 | 1.000 | 0.859 | 0.945 | 0.888 | 0.642 | 1.000 | |
| 2019 | 0.81 | 0.863 | 0.987 | 0.979 | 0.988 | 1.000 | 1.000 | 0.975 | 0.958 | 0.977 | 1.000 | 1.000 | |
| Rivne | 2013 | 0.985 | 0.973 | 0.865 | 0.940 | 0.938 | 0.918 | 0.905 | 0.762 | 0.886 | 0.884 | 0.848 | 0.826 |
| 2016 | 0.814 | 0.799 | 0.878 | 0.979 | 0.988 | 0.955 | 0.943 | 0.783 | 0.958 | 0.976 | 0.914 | 0.893 | |
| 2019 | 0.899 | 0.844 | 0.984 | 0.993 | 0.975 | 1.000 | 1.000 | 0.968 | 0.985 | 0.951 | 1.000 | 1.000 | |
| Sumy | 2013 | 0.97 | 0.974 | 0.911 | 0.883 | 0.923 | 0.988 | 0.954 | 0.837 | 0.791 | 0.857 | 0.977 | 0.912 |
| 2016 | 0.873 | 0.83 | 0.937 | 0.971 | 0.968 | 0.907 | 0.985 | 0.883 | 0.944 | 0.937 | 0.829 | 0.971 | |
| 2019 | 0.898 | 0.898 | 0.998 | 1.000 | 0.983 | 1.000 | 0.969 | 0.996 | 1.000 | 0.967 | 1.000 | 0.939 | |
| Ternopil | 2013 | 0.967 | 0.989 | 0.798 | 0.846 | 0.956 | 0.945 | 0.851 | 0.664 | 0.733 | 0.917 | 0.897 | 0.741 |
| 2016 | 0.758 | 0.721 | 0.861 | 1.000 | 0.955 | 0.982 | 0.963 | 0.756 | 1.000 | 0.914 | 0.966 | 0.929 | |
| 2019 | 0.867 | 0.833 | 0.810 | 0.842 | 0.955 | 1.000 | 0.980 | 0.682 | 0.727 | 0.914 | 1.000 | 0.962 | |
| Vinnitsa | 2013 | 0.969 | 0.767 | 0.896 | 0.818 | 0.967 | 0.886 | 0.960 | 0.812 | 0.692 | 0.937 | 0.795 | 0.923 |
| 2016 | 0.794 | 0.817 | 0.920 | 0.906 | 0.887 | 0.914 | 0.879 | 0.852 | 0.828 | 0.797 | 0.841 | 0.784 | |
| 2019 | 0.695 | 0.82 | 0.960 | 0.959 | 1.000 | 0.988 | 1.000 | 0.924 | 0.921 | 1.000 | 0.977 | 1.000 | |
| Volyn | 2013 | 0.988 | 0.94 | 0.970 | 0.946 | 0.982 | 0.938 | 0.970 | 0.942 | 0.897 | 0.966 | 0.884 | 0.941 |
| 2016 | 0.9 | 0.92 | 0.956 | 0.951 | 0.983 | 0.935 | 0.919 | 0.915 | 0.906 | 0.967 | 0.877 | 0.850 | |
| 2019 | 0.844 | 0.886 | 0.974 | 0.976 | 1.000 | 0.925 | 1.000 | 0.949 | 0.953 | 1.000 | 0.860 | 1.000 | |
| Zakarpattia | 2013 | 0.914 | 0.936 | 0.810 | 0.939 | 0.783 | 0.333 | 0.308 | 0.683 | 0.885 | 0.644 | 0.200 | 0.182 |
| 2016 | 0.787 | 0.773 | 0.873 | 0.772 | 0.914 | 0.875 | 1.000 | 0.776 | 0.629 | 0.842 | 0.778 | 1.000 | |
| 2019 | 0.989 | 0.975 | 0.985 | 0.979 | 0.989 | 1.000 | 1.000 | 0.972 | 0.958 | 0.979 | 1.000 | 1.000 | |
| Zaporizhzhia | 2013 | 0.746 | 0.847 | 0.964 | 0.922 | 0.911 | 0.880 | 0.968 | 0.931 | 0.856 | 0.837 | 0.786 | 0.938 |
| 2016 | 0.906 | 0.955 | 0.996 | 0.981 | 0.951 | 0.978 | 0.981 | 0.991 | 0.964 | 0.906 | 0.957 | 0.963 | |
| 2019 | 0.995 | 0.997 | 0.999 | 1.000 | 1.000 | 0.995 | 1.000 | 0.997 | 1.000 | 1.000 | 0.991 | 1.000 | |
| Zhytomyr | 2013 | 0.896 | 0.851 | 0.899 | 0.950 | 0.983 | 0.939 | 0.889 | 0.817 | 0.906 | 0.967 | 0.886 | 0.800 |
| 2016 | 0.833 | 0.823 | 0.878 | 0.981 | 0.885 | 0.970 | 1.000 | 0.782 | 0.962 | 0.795 | 0.941 | 1.000 | |
| 2019 | 0.99 | 0.995 | 0.997 | 1.000 | 1.000 | 1.000 | 0.973 | 0.995 | 1.000 | 1.000 | 1.000 | 0.947 | |
References
- Li, X.; Zhou, Y.; Eom, J.; Yu, S.; Asrar, G.R. Projecting global urban area growth through 2100 based on historical time series data and future shared socioeconomic pathways. Earth Futur. 2019, 7, 351–362. [Google Scholar] [CrossRef] [Green Version]
- Seto, K.C.; Parnell, S.; Elmqvist, T. A Global Outlook on Urbanization; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Jaeger, J.A.G.; Bertiller, R.; Schwick, C.; Kienast, F. Suitability criteria for measures of urban sprawl. Ecol. Indic. 2010, 10, 397–406. [Google Scholar] [CrossRef]
- Brueckner, J.K. Urban sprawl: Diagnosis and remedies. Int. Reg. Sci. Rev. 2000, 23, 160–171. [Google Scholar] [CrossRef]
- Nechyba, T.J.; Walsh, R.P. Urban Sprawl. J. Econ. Perspect. 2004, 18, 177–200. [Google Scholar] [CrossRef] [Green Version]
- Angel, S.; Lamson-Hall, P.; Blei, A.; Shingade, S.; Kumar, S. Densify and Expand: A Global Analysis of Recent Urban Growth. Sustainability 2021, 13, 3835. [Google Scholar] [CrossRef]
- Club, S. The Dark Side of the American Dream: The Costs and Consequences of Suburban Sprawl; Challenge to Sprawl Campaign: College Park, MD, USA, 1998; Available online: www.tamalpais.sierraclub.org/transportation/sprawl/Sprawl_report.what.html (accessed on 1 December 2021).
- U.S. Department of Housing and Urban Development, Office of Policy Development. The State of the Cities 1999: Third Annual Report; U.S. Department of Housing and Urban Development, Office of Policy Development: Washington, DC, USA, 1999. [Google Scholar]
- Burchell, R.W.; Galley, C.C. Projecting Incidence and Costs of Sprawl in the United States. Transp. Res. Rec. 2003, 1831, 150–157. [Google Scholar] [CrossRef]
- Santé, I.; García, A.M.; Miranda, D.; Crecente, R. Cellular automata models for the simulation of real-world urban processes: A review and analysis. Landsc. Urban Plan. 2010, 96, 108–122. [Google Scholar] [CrossRef]
- Aburas, M.M.; Ho, Y.M.; Ramli, M.F.; Ash’aari, Z.H. The simulation and prediction of spatio-temporal urban growth trends using cellular automata models: A review. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 380–389. [Google Scholar] [CrossRef]
- Tong, X.; Feng, Y. A review of assessment methods for cellular automata models of land-use change and urban growth. Int. J. Geogr. Inf. Sci. 2019, 34, 866–898. [Google Scholar] [CrossRef]
- Grekousis, G. Artificial neural networks and deep learning in urban geography: A systematic review and meta-analysis. Comput. Environ. Urban Syst. 2019, 74, 244–256. [Google Scholar] [CrossRef]
- Berberoğlu, S.; Akın, A.; Clarke, K.C. Cellular automata modeling approaches to forecast urban growth for Adana, Turkey: A comparative approach. Landsc. Urban Plan. 2016, 153, 11–27. [Google Scholar] [CrossRef]
- Clarke, K.C. A Decade of Cellular Urban Modeling with SLEUTH: Unresolved Issues and Problems, Chapter 3. In Planning Support Systems for Cities and Regions; Brail, R.K., Ed.; Lincoln Institute of Land Policy: Cambridge, MA, USA, 2008; pp. 47–60. [Google Scholar]
- Rienow, A.; Goetzke, R. Supporting SLEUTH–Enhancing a cellular automaton with support vector machines for urban growth modeling. Comput. Environ. Urban Syst. 2015, 49, 66–81. [Google Scholar] [CrossRef]
- Kuru, A.; Yüzer, M.A. Urban growth prediction with parcel based 3D urban growth model (PURGOM). MethodsX 2021, 8, 101302. [Google Scholar] [CrossRef] [PubMed]
- Tayyebi, A.; Pijanowski, B.C.; Pekin, B. Two rule-based urban growth boundary models applied to the Tehran metropolitan area, Iran. Appl. Geogr. 2011, 31, 908–918. [Google Scholar] [CrossRef]
- Meentemeyer, R.K.; Tang, W.; Dorning, M.A.; Vogler, J.B.; Cunniffe, N.J.; Shoemaker, D.A. FUTURES: Multilevel simulations of emerging urban-rural landscape structure using a stochastic patch-growing algorithm. Ann. Assoc. Am. Geogr. 2013, 103, 785–807. [Google Scholar] [CrossRef] [Green Version]
- Developing Countries. Available online: https://www.worlddata.info/developing-countries.php (accessed on 31 January 2022).
- State Statistics Service of Ukraine. Available online: http://www.ukrstat.gov.ua/ (accessed on 31 December 2021).
- Population of Ukraine. Available online: http://database.ukrcensus.gov.ua/pxweb2007/popul_eng.htm (accessed on 31 January 2022).
- LandScan Datasets | LandScanTM. Available online: https://landscan.ornl.gov/landscan-datasets (accessed on 31 January 2022).
- First-Level Administrative Divisions, Ukraine, 2015-University of Texas Libraries GeoData. Available online: https://geodata.lib.utexas.edu/catalog/stanford-gg870xt4706 (accessed on 31 January 2022).
- Liu, Y. The impact of neighbourhood size on the accuracy of cellular automata-based urban modelling. Appl. GIS 2007, 3, 1–14. [Google Scholar]
- Barricelli, N.A. Symbiogenetic processes realized by artificial methods. Methods 1957, 9, 143–182. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Chung, N.C.; Miasojedow, B.; Startek, M.; Gambin, A. Jaccard/Tanimoto similarity test and estimation methods. arXiv 2019, 20, 644. [Google Scholar]
- JASP-A Fresh Way to Do Statistics. Available online: https://jasp-stats.org/ (accessed on 31 January 2022).
- Elfversson, E.; Höglund, K. Are armed conflicts becoming more urban? Cities 2021, 119, 103356. [Google Scholar] [CrossRef]
- Li, X.; Yang, Q.; Liu, X. Discovering and evaluating urban signatures for simulating compact development using cellular automata. Landsc. Urban Plan. 2008, 86, 177–186. [Google Scholar] [CrossRef]
- Feng, Y.; Liu, Y. An optimised cellular automata model based on adaptive genetic algorithm for urban growth simulation. In Advances in Spatial Data Handling and GIS; Lecture Notes in Geoinformation and Cartography; Springer: Berlin/Heidelberg, Germany, 2012; pp. 27–38. [Google Scholar] [CrossRef] [Green Version]
- Dijkstra, L.; Poelman, H.; Veneri, P. The EU-OECD definition of a functional urban area. In OECD Regional Development Working Papers; OECD: Paris, France, 2019; p. 11. Available online: https://www.oecd-ilibrary.org/urban-rural-and-regional-development/the-eu-oecd-definition-of-a-functional-urban-area_d58cb34d-en (accessed on 1 December 2021).






| (a) | ||||||||
| Actual Population Classes | Positive Predictive Values | |||||||
| <1000 | 1000–2000 | 2000–3000 | 3000–4000 | 4000–5000 | >5000 | |||
| Model-predicted population classes | <1000 | 7628 | 17 | 0 | 0 | 0 | 0 | 0.997 |
| 1000–2000 | 1 | 25 | 0 | 0 | 0 | 0 | 0.962 | |
| 2000–3000 | 0 | 1 | 9 | 0 | 0 | 0 | 0.9 | |
| 3000–4000 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | |
| 4000–5000 | 0 | 0 | 0 | 0 | 2 | 0 | 1 | |
| >5000 | 0 | 0 | 0 | 0 | 0 | 5 | 1 | |
| True positive rates | 0.999 | 0.581 | 1 | 1 | 1 | 1 | Adjusted acc. = ~99% | |
| (b) | ||||||||
| Actual Population Classes | Positive Predictive Values | |||||||
| <1000 | 1000–2000 | 2000–3000 | 3000–4000 | 4000–5000 | >5000 | |||
| Model-predicted population classes | <1000 | 24,505 | 62 | 15 | 5 | 4 | 2 | 0.996 |
| 1000–2000 | 1 | 5 | 3 | 1 | 0 | 0 | 0.5 | |
| 2000–3000 | 0 | 2 | 1 | 0 | 0 | 0 | 0.333 | |
| 3000–4000 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | |
| 4000–5000 | 0 | 0 | 2 | 4 | 4 | 0 | 0.267 | |
| >5000 | 0 | 0 | 0 | 0 | 0 | 0 | - | |
| True positive rates | 0.999 | 0.072 | 0.043 | 0 | 0.571 | 0 | Adjusted acc. = ~27% | |
| (c) | ||||||||
| Actual Population Classes | Positive Predictive Values | |||||||
| <1000 | 1000–2000 | 2000–3000 | 3000–4000 | 4000–5000 | >5000 | |||
| Model-predicted population classes | <1000 | 30,578 | 44 | 0 | 0 | 0 | 0 | 0.999 |
| 1000–2000 | 1 | 25 | 1 | 0 | 0 | 0 | 0.926 | |
| 2000–3000 | 0 | 1 | 17 | 3 | 1 | 0 | 0.772 | |
| 3000–4000 | 0 | 0 | 0 | 4 | 1 | 0 | 0.8 | |
| 4000–5000 | 0 | 0 | 2 | 1 | 7 | 2 | 0.7 | |
| >5000 | 0 | 0 | 0 | 0 | 0 | 20 | 1 | |
| True positive rates | 0.999 | 0.357 | 0.944 | 0.5 | 0.778 | 0.901 | Adjusted acc. = ~87% | |
| Effect of | Parameter | Mauchly’s Sphericity Test | Repeated Measures ANOVA Test | Friedman’s Test | |||
|---|---|---|---|---|---|---|---|
| W | p | F | p | χ2 | p | ||
| Population-density class | k | 0.626 | 0.003 | - | - | 204.38 | <0.001 |
| d | 0.466 | <0.001 | - | - | 12.032 | <0.001 | |
| e | 0.783 | 0.049 | - | - | 8.328 | <0.001 | |
| Time window | k | 0.982 | 0.383 | 0.051 | 0.950 | 0.025 | 0.988 |
| d | 0.976 | 0.245 | 3.400 | 0.015 | 6.03 | 0.049 | |
| e | 0.964 | 0.114 | 0.070 | 0.933 | 0.766 | 0.682 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lohachov, M.; Rybnikova, N. A Cellular-Automaton Model for Population-Density and Urban-Extent Dynamics at the Regional Level: The Case of Ukrainian Provinces. Geographies 2022, 2, 186-200. https://doi.org/10.3390/geographies2020013
Lohachov M, Rybnikova N. A Cellular-Automaton Model for Population-Density and Urban-Extent Dynamics at the Regional Level: The Case of Ukrainian Provinces. Geographies. 2022; 2(2):186-200. https://doi.org/10.3390/geographies2020013
Chicago/Turabian StyleLohachov, Mykhailo, and Nataliya Rybnikova. 2022. "A Cellular-Automaton Model for Population-Density and Urban-Extent Dynamics at the Regional Level: The Case of Ukrainian Provinces" Geographies 2, no. 2: 186-200. https://doi.org/10.3390/geographies2020013