
Search Strategy for Buried Objects in Water: Geophysics, Probes and Dogs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Background to the Issue
2. Example Case That Demonstrates the Issue
3. Recommended Equipment and Methods
4. Recommendations
- Background information (formerly known as ‘intelligence’) from search authorities (search and rescue; law enforcement; humanitarian organisations) is received—providing an indication of the search area.
- Search area defined by specialists, considering hazards, water chemistry (e.g., conductive seawater/brackish water/ polluted areas), size/makeup of target.
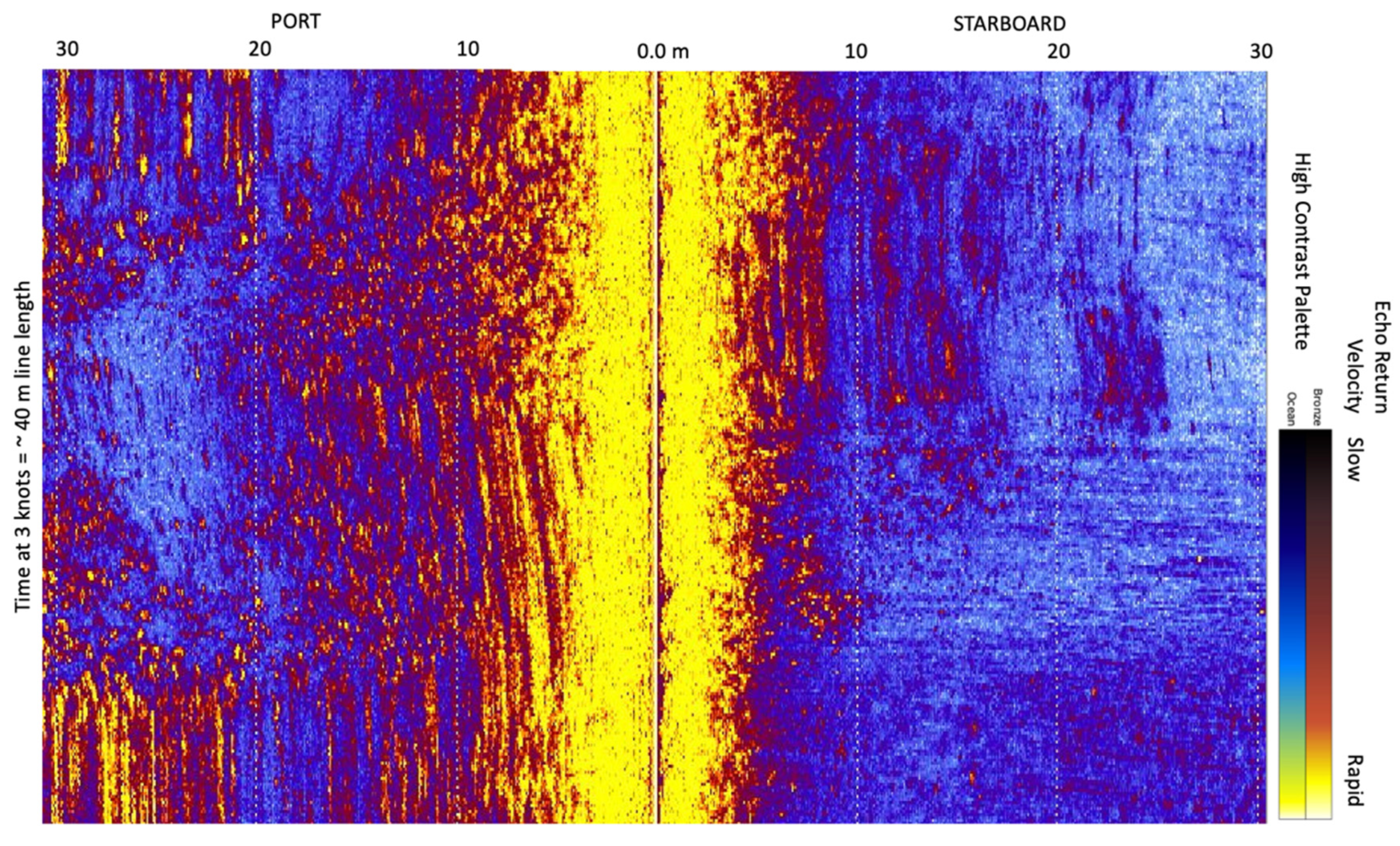
- Reconnaissance sonar of water body and its base gathered by boat or UAV/drone [12]: may provide an ‘easy win’ in location of the missing object/person.
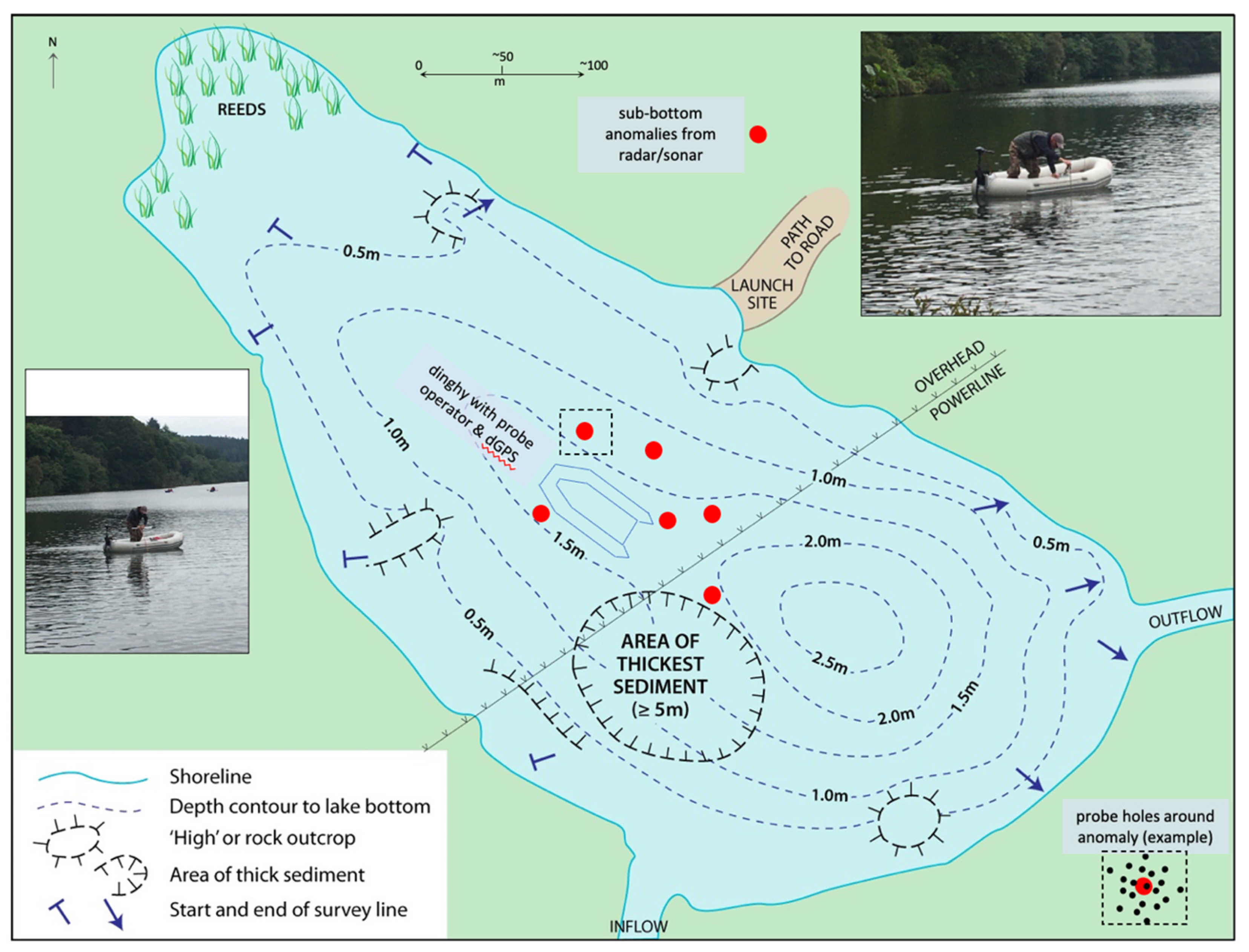
- Simultaneous gathering of CHIRP and radar (both can be deployed from one boat) data, viewed in real time with anomalies marked by dGPS and buoys.
- Buoys should be subtle but observable from the water, with controls at locations with no anomaly, to avoid unconscious bias by dog and dog-handler.
- Repeated sonar/CHIRP/WPR surveys over marked anomalies, to improve location accuracy—repositioning of buoys if needed.
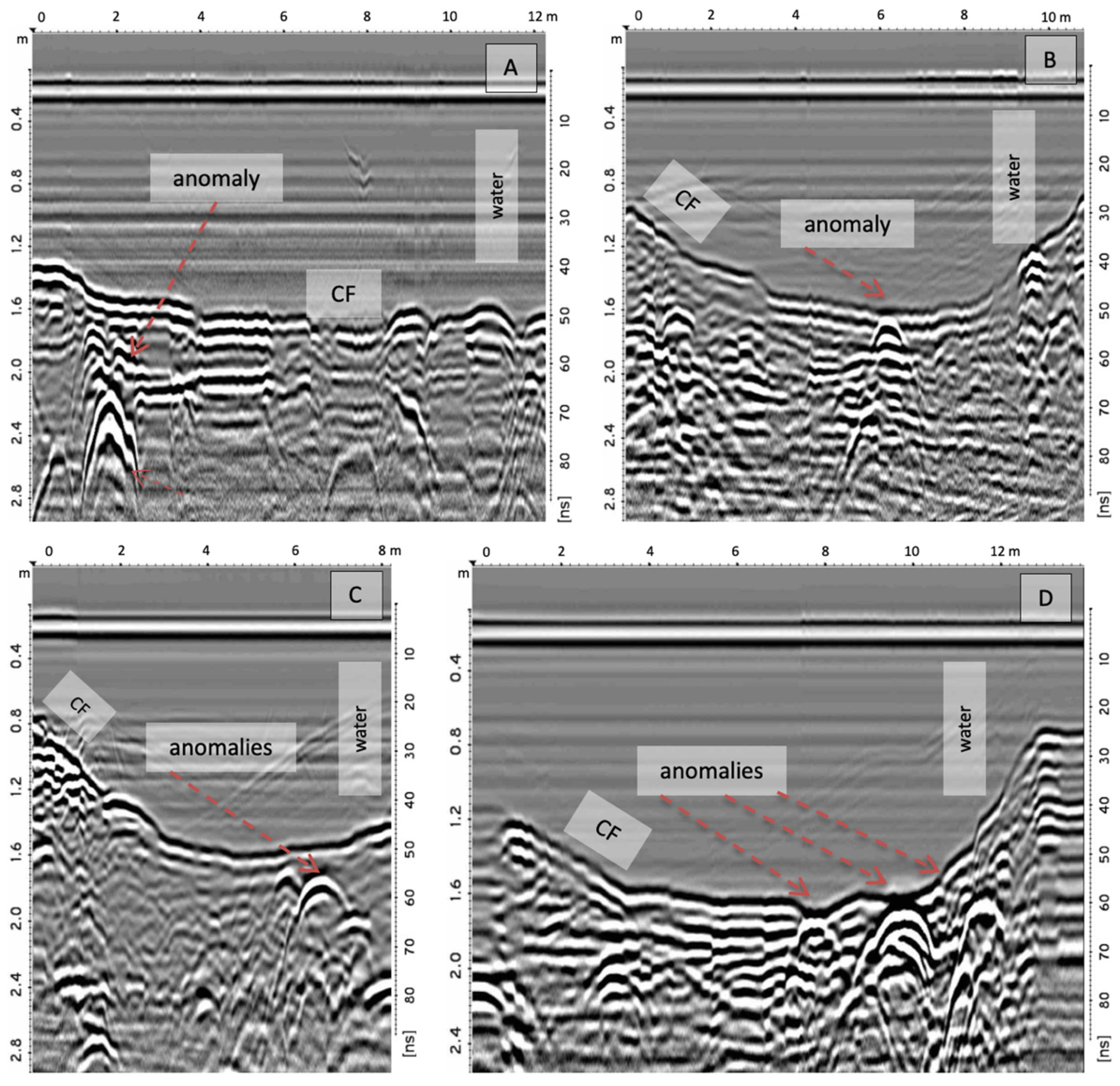
- Evaluation of anomalies, with a hierarchy of likely targets based on reflection characteristics, dimensions, depth, spatial location in the water body (close to shore, covert, access via perpetrator boat etc.).
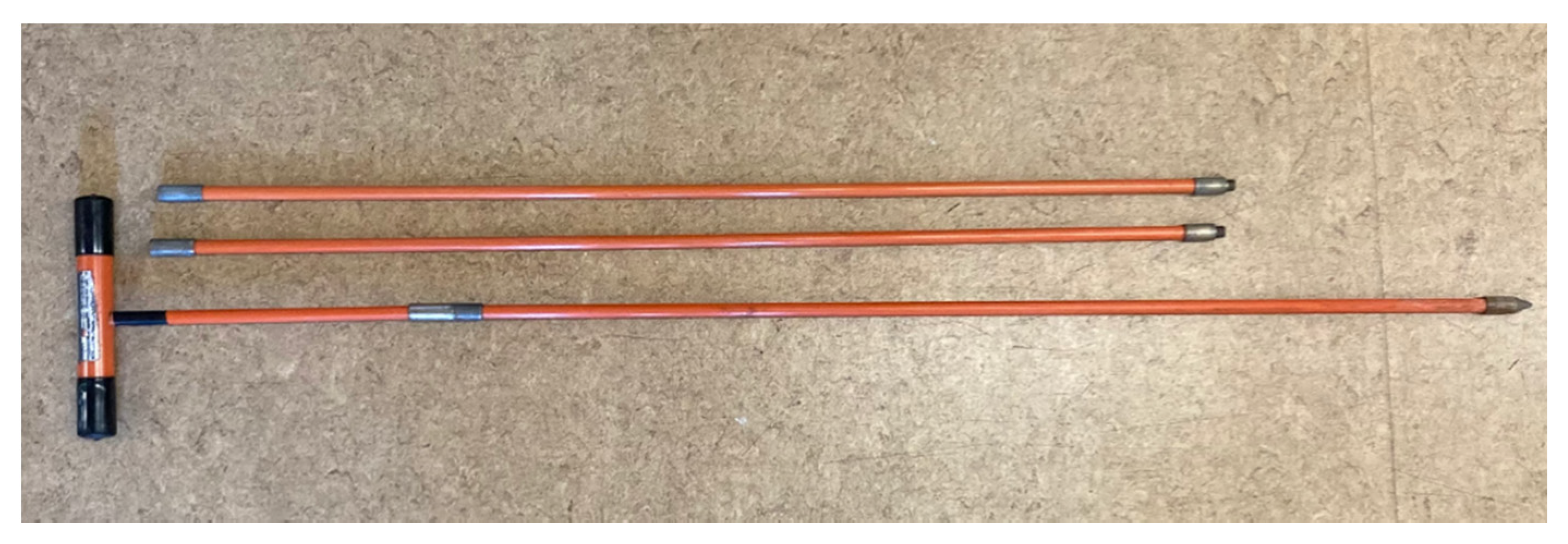
- Probing of sediment above and to the top of target anomalies (as in Figure 3): observation of gas bubble release.
- Deployment of water-trained scent dogs 5 to 20 min after probing (depending on gas release): best practice being two or more dogs, each taken individually by boat and moved in a zig-zag manner from downwind of the target to upwind. The other dog(s) remain out of sight and earshot to be deployed independently [3,4,15].
- No consistent dog indication over targets allows buoys to be removed (locations are known from dGPS and stored in a geographic information system). If an individual object such as one human cadaver is the target, combined background, geophysical anomaly and dog indication are usually sufficient in terrestrial searches to prompt forensic archaeological investigation. In this work, this would involve divers investigating the sediment by hand, or the construction of a coffer dam to isolate water from the location and allow excavation by trained archaeologists/anthropologists/disaster victim response personnel.
5. Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CHIRP | Compressed High Intensity Radar Pulse |
| Cm | centimetre |
| dGPS | differential Global Positioning System |
| GPS | Global Positioning System |
| GSSI | Geophysical Survey Systems International |
| Km | kilometre |
| M | metreMHz—megahertz |
| m/Ns | metres per nanosecond |
| nS | nanoseconds |
| Sonar | Sound Navigation and Ranging |
| TWT | two way (travel) time |
| UAV | unmanned aerial vehicle |
| WPR | water penetrating radar |
| VOC | volatile organic compound |
References
- Imaizumi, M. Locating buried bodies. FBI Law Enforc. Bull. 1974, 43, 2–5. [Google Scholar]
- Owsley, D.W. Techniques for locating burials, with emphasis on the probe. J. Forensic Sci. 1995, 40, 735–740. [Google Scholar] [CrossRef]
- Judah, C. Water Search: Search and Rescue Dogs Finding Drowned Persons; Heritage Books: Berwyn Heights, MD, USA, 2011; 180p. [Google Scholar]
- Rebmann, A.; Sorg, D.E. Cadaver Dog Handbook: Forensic Training and Tactics for the Recovery of Human Remains; CRC Books: Baton Rouge, FL, USA, 2000; 350p. [Google Scholar]
- Snovak, A.E. Barron’s Guide to Search and Rescue Dogs; Barron’s Educational Series; Happauge: New York, NY, USA, 2004; 272p. [Google Scholar]
- Armstrong, E.J.; Erskine, K. Water-Related Death Investigation: Practical Methods and Forensic Applications; CRC Press: Boca Raton, FL, USA, 2010; 388p. [Google Scholar]
- Winton, T. Validated parametric sub-bottom profiler survey measurements of sediment cover over maritime archaeological test specimens: Their importance for in-situ management and archaeological research of underwater cultural heritage sites. Australas. J. Marit. Archaeol. 2019, 43, 3–25. [Google Scholar]
- Lévêque, C. Lake and Pond Ecosystems. In Encyclopedia of Biodiversity, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2000; pp. 458–466. [Google Scholar]
- Haglund, W.D.; Sorg, M.H. Human remains in water environments. In Advances in Forensic Taphonomy: Method, Theory and Archaeological Perspectives; Haglund, W.D., Sorg, M.H., Eds.; CRC Press: Boca Raton, FL, USA, 2002; pp. 201–218. [Google Scholar]
- Ruffell, A.; Parker, R. Water penetrating radar. J. Hydrol. 2021, 597. [Google Scholar] [CrossRef]
- Bastien, N.R.P.; Arthur, S.; Wallis, S.G.; Scholz, M. Runoff infiltration, a desktop case study. Water Sci. Technol. 2011, 63, 2300–2308. [Google Scholar] [CrossRef][Green Version]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Bathymetry observations of inland water bodies using a tethered sing-beam sonar controlled by an Unmanned Aerial Vehicle. Hydrol. Earth Syst. Sci. 2017, 25, 4549–4565. [Google Scholar]
- Irish, L.; Rennie, S.R.; Parkes, G.M.B.; Williams, A. Identification of decomposition volatile organic compounds from surface-deposited and submerged porcine remains. Sci. Justice 2019, 59, 503–515. [Google Scholar] [CrossRef] [PubMed]
- Stein, J.K. Coring archaeological sites. Am. Antiq. 1986, 51, 505–527. [Google Scholar] [CrossRef]
- Powell, N. Search Dogs and Me: One Man and His Life-Saving Dogs; Blackstaff Press: Belfast, UK, 2011; 288p. [Google Scholar]
- Rendine, M.; Fiore, C.F.; Bertozzi, G.; De Carlo, D.; Filetti, V.; Fortarezza, P.; Riezzo, I. Decomposing human blood: Canine detection odour signature and volatile organic compounds. J. Forensic Sci. 2019, 64, 587–592. [Google Scholar] [CrossRef]
- Dargan, R.; Forbes, S.L. Cadaver-detection dogs: A review of their capabilities and the volatile organic compound profile of their associated training aids. Wires Forensic Sci. 2020, e1409. [Google Scholar] [CrossRef]
- Forbes, S.L.; Rust, L.T.; Trebilcock, K.; Perrault, K.A.; McGrath, L.T. Effect of age and storage conditions on the volatile organic compound profile of blood. Forensic Sci. Med. Pathol. 2021, 10, 570–582. [Google Scholar] [CrossRef]
- Fuchs, M.; Beres, M.; Anselmetti, F.S. Sedimentological Studies of Western Swiss Lakes with High Resolution Reflection Seismic and Amphibious GPR Profiling. In Proceedings of the 10th International Conference on Ground Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 1–4. [Google Scholar]
- Kovacs, A. Impulse Radar Bathymetric Pro-Filing in Weed-Infested Fresh Water; (CRREL) Report; USA Cold Regions Research and Engineering Laboratory: Hanover, NH, USA, 1991; 19p. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruffell, A.; Powell, N. Search Strategy for Buried Objects in Water: Geophysics, Probes and Dogs. Forensic Sci. 2021, 1, 130-137. https://doi.org/10.3390/forensicsci1030012
Ruffell A, Powell N. Search Strategy for Buried Objects in Water: Geophysics, Probes and Dogs. Forensic Sciences. 2021; 1(3):130-137. https://doi.org/10.3390/forensicsci1030012
Chicago/Turabian StyleRuffell, Alastair, and Neil Powell. 2021. "Search Strategy for Buried Objects in Water: Geophysics, Probes and Dogs" Forensic Sciences 1, no. 3: 130-137. https://doi.org/10.3390/forensicsci1030012
APA StyleRuffell, A., & Powell, N. (2021). Search Strategy for Buried Objects in Water: Geophysics, Probes and Dogs. Forensic Sciences, 1(3), 130-137. https://doi.org/10.3390/forensicsci1030012