
Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Problem Statement
3. Solution for the Normal Load
4. Solution for the Tangential Load
5. Application: Subsurface Stress Field in Frictional Contacts of Elastically Similar Axisymmetric Bodies
5.1. General Procedure for Arbitrary Convex Profile Geometries
- Determine the subsurface stresses resulting from the normal loading, based on the superposition integral (33).
- Determine the series of rigid tangential translations which reproduces the tangential contact configuration. For the Cattaneo–Mindlin loading history, Equation (39) can be used; for more general oblique loading, an MDR contact solver should be implemented.
- Determine the subsurface stresses resulting from the tangential loading, based on the superposition integral (36).
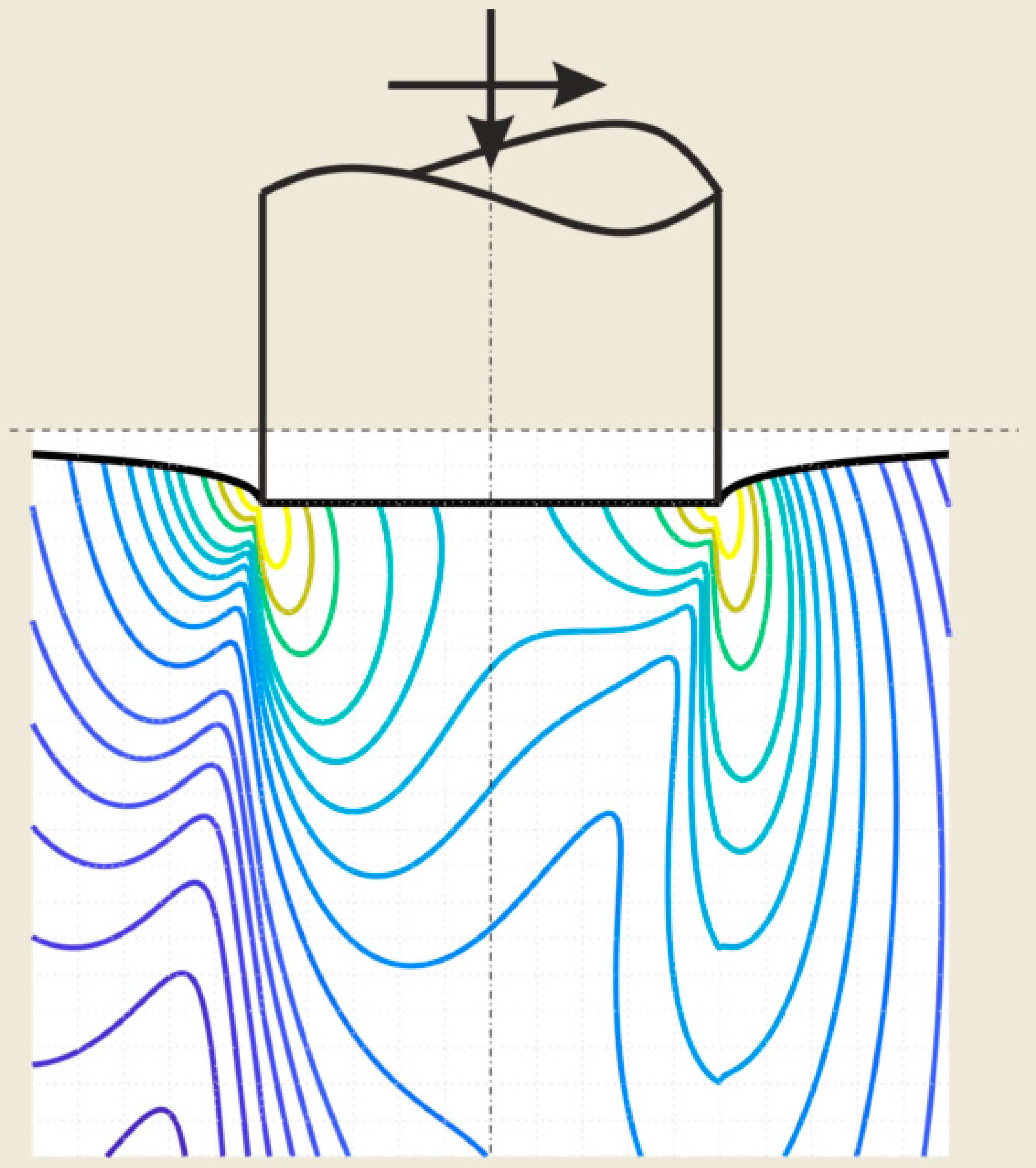
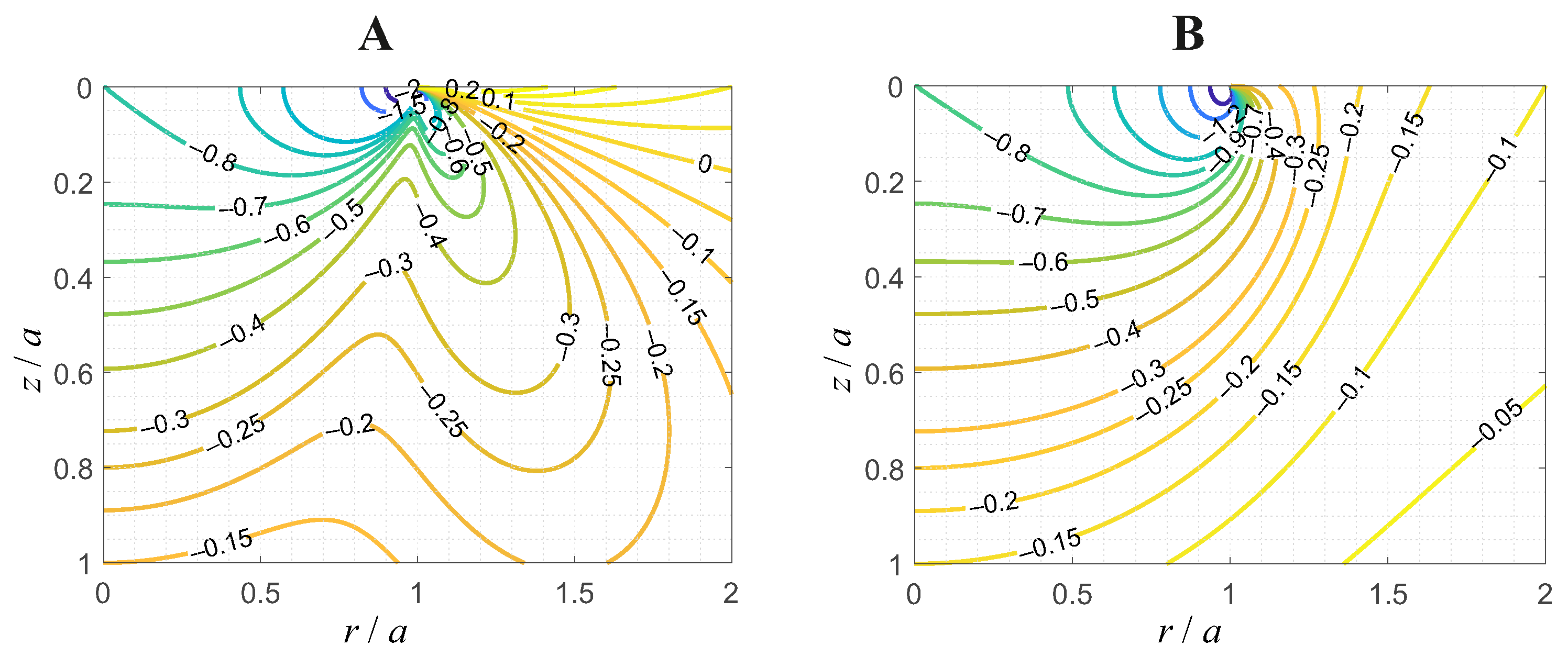
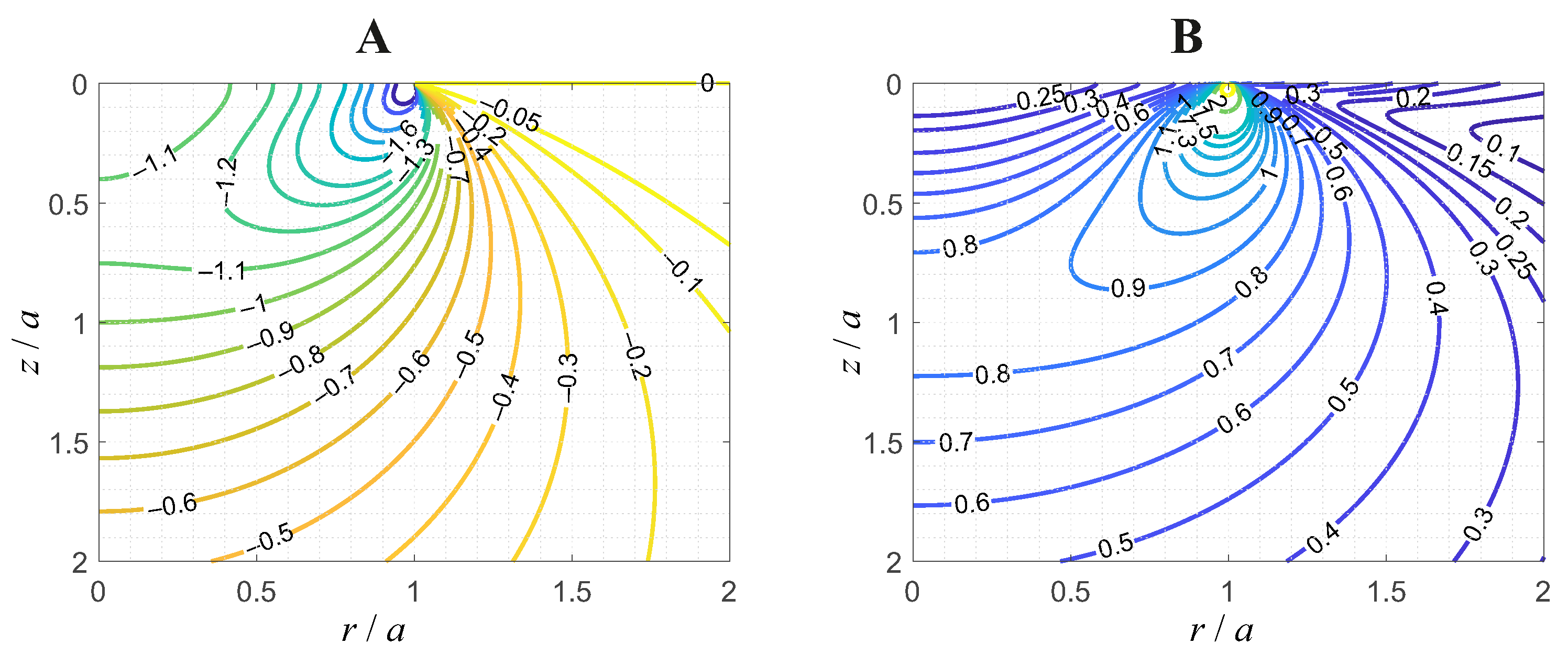
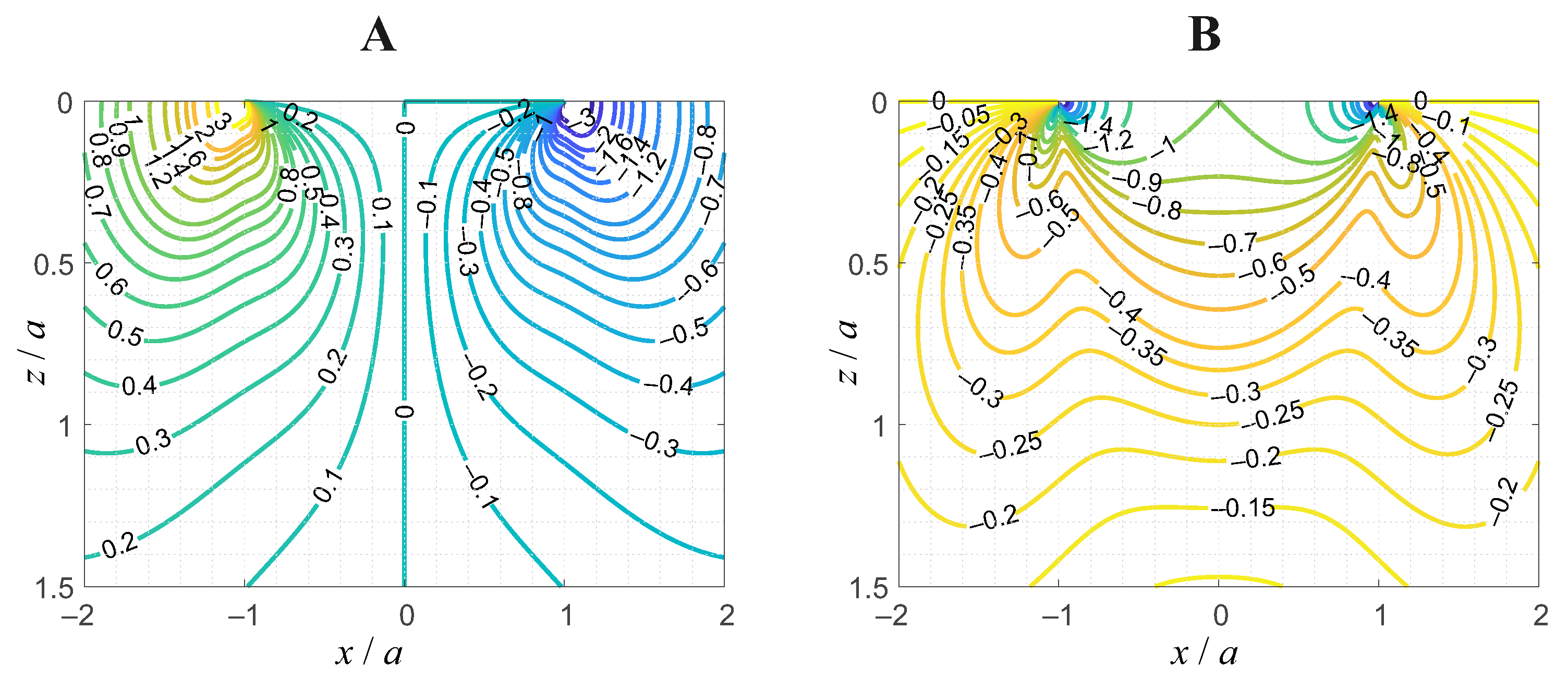
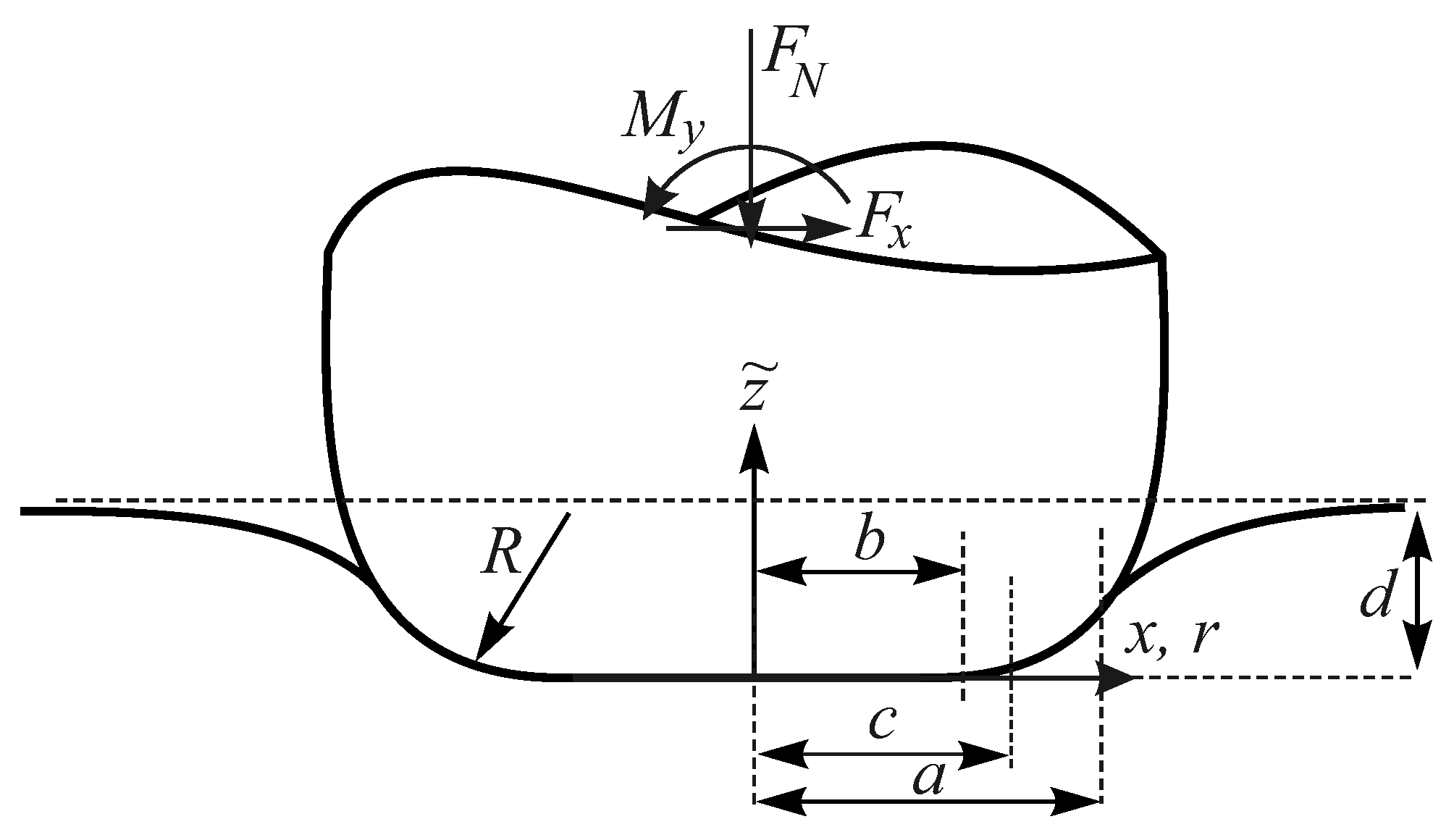
5.2. Example: Contact with a Cylindrical Flat Punch with Rounded Corners
6. Discussion and Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hertz, H. Über die Berührung fester elastischer Körper. J. Die Reine Angew. Math. 1882, 92, 156–171. [Google Scholar] [CrossRef]
- Huber, M.T. Zur Theorie der Berührung fester elastischer Körper. Ann. Phys. 1904, 14, 153–163. [Google Scholar] [CrossRef]
- Boussinesq, J. Application des Potentiels a L’etude de L’Equilibre et du Mouvement des Solides Elastiques; Imprimerie L. Danel: Lille, France, 1885. [Google Scholar]
- Cerruti, V. Ricerche intorno all’equilibrio de’ corpi elastici isotropi. Rend. Accad. Naz. Lincei 1882, 3, 81–122. [Google Scholar]
- van der Wekken, C.D.; Vollebregt, E.A.H. Numerical calculation of the elastic field in a half-space using bilinear elements. Math. Mech. Solids 2019, 24, 3537–3553. [Google Scholar] [CrossRef]
- Sackfield, A.; Hills, D.A. Some Useful Results in the Classical Hertz Contact Problem. J. Strain Anal. Eng. Des. 1983, 18, 101–105. [Google Scholar] [CrossRef]
- Hamilton, G.M.; Goodman, L.E. The Stress Field Created by a Circular Sliding Contact. J. Appl. Mech. 1966, 33, 371–376. [Google Scholar] [CrossRef]
- Hamilton, G.M. Explicit Equations for the Stresses beneath a Sliding Spherical Contact. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1983, 197, 53–59. [Google Scholar] [CrossRef]
- Sackfield, A.; Hills, D.A. Some Useful Results in the Tangentially Loaded Hertzian Contact Problem. J. Strain Anal. Eng. Des. 1983, 18, 107–110. [Google Scholar] [CrossRef]
- Sneddon, I.N. The relation between load and penetration in the axisymmetric boussinesq problem for a punch of arbitrary profile. Int. J. Eng. Sci. 1965, 3, 47–57. [Google Scholar] [CrossRef]
- Yang, L.; Wang, Z.; Liu, W.; Zhang, G.; Peng, B. Interior-stress fields produced by a general axisymmetric punch. Friction 2022, 10, 530–544. [Google Scholar] [CrossRef]
- Muskhelishvili, N.I. Singular Integral Equations; Wolters-Noordhoff Publishing: Groningen, The Netherlands, 1958. [Google Scholar]
- Willert, E.; Forsbach, F.; Popov, V.L. Stress tensor and gradient of hydrostatic pressure in the contact plane of axisymmetric bodies under normal and tangential loading. ZAMM Z. Angew. Math. Mech. 2020, 100, e201900223. [Google Scholar] [CrossRef]
- Forsbach, F. Stress Tensor and Gradient of Hydrostatic Pressure in the Half-Space Beneath Axisymmetric Bodies in Normal and Tangential Contact. Front. Mech. Eng. 2020, 6, 39. [Google Scholar] [CrossRef]
- Mossakovskij, V.I. Compression of Elastic Bodies under Conditions of Adhesion (Axisymmetric Case). PMM J. Appl. Math. Mech. 1963, 27, 630–643. [Google Scholar] [CrossRef]
- Jäger, J. Axi-symmetric bodies of equal material under torsion or shift. Arch. Appl. Mech. 1995, 65, 478–487. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics—Exact Solutions of Axisymmetric Contact Problems; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Bonari, J.; Paggi, M.; Dini, D. A new finite element paradigm to solve contact problems with roughness. Int. J. Solids Struct. 2022, 253, 111643. [Google Scholar] [CrossRef]
- Lee, S.C.; Ren, N. The Subsurface Stress Field Created by Three- Dimensionally Rough Bodies in Contact with Traction. Tribol. Trans. 1994, 37, 615–621. [Google Scholar] [CrossRef]
- Pohrt, R.; Li, Q. Complete boundary element formulation for normal and tangential contact problems. Phys. Mesomech. 2014, 17, 334–340. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M. Method of Dimensionality Reduction in Contact Mechanics and Friction; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Cattaneo, C. Sul Contatto di due Corpore Elastici: Distribuzione degli sforzi. Rend. Acad. Naz. Lincei 1938, 27, 342–348, 434–436, 474–478. [Google Scholar]
- Mindlin, R.D. Compliance of Elastic Bodies in Contact. J. Appl. Mech. 1949, 16, 259–268. [Google Scholar] [CrossRef]
- Munisamy, R.L.; Hills, D.A.; Nowell, D. Static Axisymmetric Hertzian Contacts Subject to Shearing Forces. J. Appl. Mech. 1994, 61, 278–283. [Google Scholar] [CrossRef]
- Barber, J.R. Contact Mechanics; Springer International Publishing: Basel, Switzerland, 2018. [Google Scholar]
- Benad, J. Fast numerical implementation of the MDR transformations. Facta Univ. Ser. Mech. Eng. 2018, 16, 127–138. [Google Scholar] [CrossRef]
- Jäger, J. Elastic contact of equal spheres under oblique forces. Arch. Appl. Mech. 1993, 63, 402–412. [Google Scholar] [CrossRef]
- Willert, E. Influence of Wear Profile Geometry on Critical Plane Fatigue Crack Initiation Criteria in Plane and Axisymmetric Elastic Fretting Contacts. Front. Mech. Eng. 2022, 8, 904282. [Google Scholar] [CrossRef]
- Goodman, L.E. Contact stress analysis of normally loaded rough spheres. J. Appl. Mech. 1962, 29, 515–522. [Google Scholar] [CrossRef]
- Leroy, J.-E.; Popov, V.L. Stress tensor in the linear viscoelastic incompressible half-space beneath axisymmetric bodies in normal contact. Rep. Mech. Eng. 2023, 4, 310–316. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Willert, E. Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load. Solids 2024, 5, 14-28. https://doi.org/10.3390/solids5010002
Willert E. Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load. Solids. 2024; 5(1):14-28. https://doi.org/10.3390/solids5010002
Chicago/Turabian StyleWillert, Emanuel. 2024. "Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load" Solids 5, no. 1: 14-28. https://doi.org/10.3390/solids5010002
APA StyleWillert, E. (2024). Elastic Stress Field beneath a Sticking Circular Contact under Tangential Load. Solids, 5(1), 14-28. https://doi.org/10.3390/solids5010002