
The Smallest “Miner” of the Animal Kingdom and Its Importance for Raw Materials Exploitation



Abstract
1. Introduction
1.1. The Importance of Ants for Human Society
1.2. Processes That Simulate Mining in Ant Colony Operation
- The main objective of ants is food concentration, whereas, in mining, it can be paralleled with ore concentration.
- The ant nest can be correlated with the mine site.
- For foraging, some ants have the role of scouts and can be paralleled with exploration (geophysical, drilling) for finding deposits, where instead of foraging, the aim is to find exploitable concentrations of minerals.
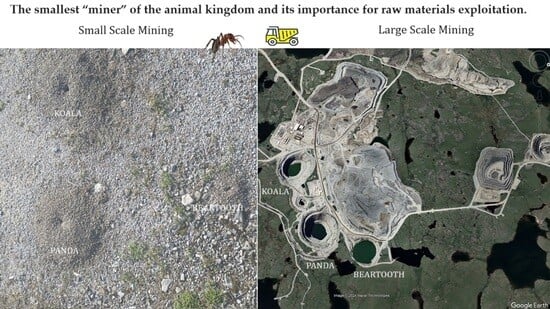
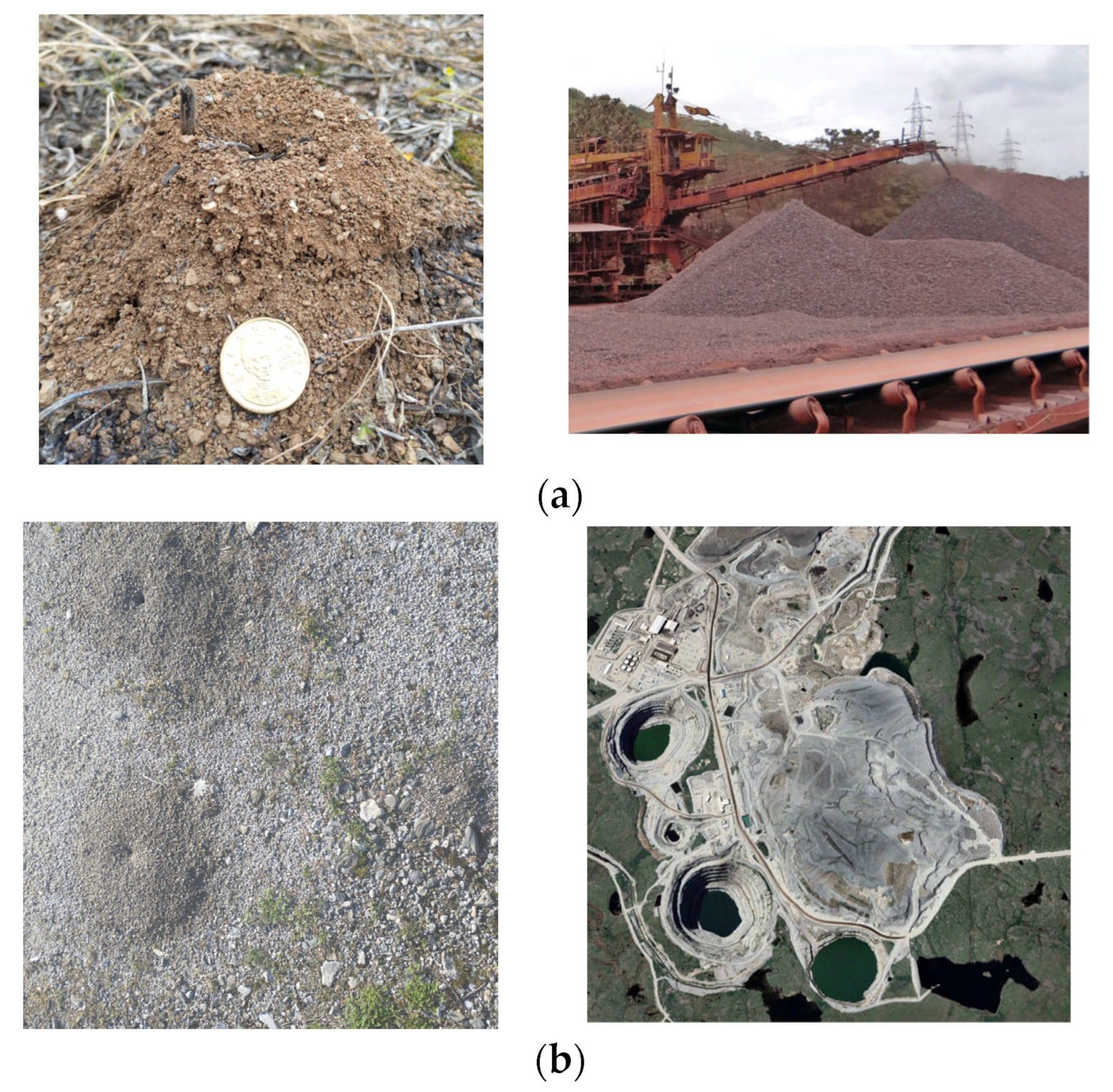
- The carriers transferring the food to the nest can be associated with trucks transporting the mined material from the mine to the deposit position. It should be noted that transport follows the opposite path in mining operations than ants’ movement from the operation (nest) to the deposition site (food source), as the goal of ants is storage, while in mining operations, it is extraction. Further, in large-scale mining, the fleet of trucks resembles the swarm of ants as they march from and to the nest.
- The workers who excavate and maintain the nest are associated with the drilling, excavation, and support operations of underground and subterranean mining. Therefore, excavators and drillers can be associated with ant workers.
- The guards responsible for protecting the nest can be associated with the mine safety engineers who are responsible for ensuring that all safety rules for the proper operation of the mine are followed.
- Winged ants looking for new places to establish new colonies can be associated with drones and the use of aerial photography to detect new mine sites.
- The queen that in ants creates the entire colony can be related to the rules that govern the operation of exploitations in each state. In Greece, these rules are defined by the Regulations for Mining and Quarrying Operations.

2. Materials and Methods
3. Surface Exploitations
3.1. The Myth of Gold-Digging Ants
3.2. Mine Rehabilitation
- Yeo et al.’s [40] study of mining restoration on Mount Nimba, Guinea, showed that ant populations and species are more affected by the restoration area than vegetation in protected areas without mining.
- The research by Ribas et al. [41] used different ant species as bioindicators to examine the restoration of gold mining tailings from three different mines in Nova Lima, southeastern Brazil and determine the most appropriate restoration method.
- Andersen’s [42] work examines uranium reclamation sites in Australia. It shows that the location of the mine in the natural environment where the ants in question thrive plays a role in ant prevalence.
- Ottonetti et al. [43] suggested suitable ant species for biomarkers in restored Mediterranean mines.
- The same technique was used by Fernandes et al. [44] to study the evolution of bauxite mine reclamation in the Amazon.
- The study of Khazin et al. [45] uses two inhabitant species of ants as bioindicators: Cataglyphis longipedem and Camponotus compressus are used for heavy metal content in soils due to mining two coal sites. The first species increased, while the second decreased with increasing soil pollution.
- Buchori et al. [46] used the diversity of insects (including ants) in post-mining areas to examine their role as bioindicators. This study was conducted in a coal mine in Berau Coal in Binungan, East Kalimantan.
- Dvořáčková et al. [47] use ants as bioindicators to compare the success of rehabilitation in different regimes in the Czech Republic.

3.3. Surface Mining Geometry and Hauling
4. Underground Excavations
4.1. Stability
4.2. Excavation
- (A)
- Pulling mode, in which the ants grab the material, with the amount being proportional to the size of the grain and the size of the claw, and then they remove it from the gallery.
- (B)
- Formation mode, in which ants shape the material’s grain before removing it with a series of movements. Efficiency in material extraction and flexibility of movement has attracted the interest of mining equipment manufacturers in designing equipment to mimic the ant’s claw geometry, as in the claws and excavation machinery in shafts and high gradient adits.
- Bucket excavators, in which special claws on the bucket help cut and load loose soil formations. As exemplified by cable excavators, these machines have taken on giant proportions in surface explorations.
- Roadheaders, in which two types of machines are used: the transverse and axial types. These machines have been developed in recent years to excavate in hard formations.
- Mining Tunnel Boring Machine.
- Bucket-wheel excavator, whose primary function is continuous digging in large-scale open pit mining.
- Continuous miners consist of five parts: (a) central body, (b) cutting head, (c) loading mechanism, (d) a conveying system, and (e) rear jib section used for excavating soft materials such as coal.
4.3. Ventilation
4.4. Water Drainage
4.5. Conclusive Remarks
5. Ant Colony Algorithms
 is updated, based on the updated route
is updated, based on the updated route  and the best solution so far , giving a higher value to the most efficient routes so that in the following simulation, they show a higher probability of following that route. A typical ACO algorithm consists of the following parameters that must be defined [90]:
and the best solution so far , giving a higher value to the most efficient routes so that in the following simulation, they show a higher probability of following that route. A typical ACO algorithm consists of the following parameters that must be defined [90]:- Pheromone model.
- Heuristic variables , are usually inversely proportional to the distance from point to .
- Ant-routing table, s.
- Stochastic decision policy and selecting the objective function, f.
- Restriction regarding pheromones, .
- Scheduling of the ants.
- Restarting the algorithm after stagnation.
- Optional components, local search.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| InitializePheromoneValues() while (terminate conditions not met) do for do ConstructSolution( )if ( is valid) then LocalSearch() {optional} if ( or ) then end if end if end for PheromoneUpdate(, , )end while Output: |
- Ant system.
- Elitist ant system.
- Max–min ant system.
- Rank-based ant system.
- In the programming and operation of robotic systems, Song et al. [92].
- Another use of the method is the optimum operation of a pump for water distillation in a coal mine that, instead of running at maximum operation, alternates between valleys and peaks [95], significantly reducing costs.
- The optimization of the loading–transport cycle by selecting the most suitable loading location concerning the traffic congestion at the loading and unloading locations [96] is an alternative methodology to that of the queuing theory.
- In their research, Wan and Du [97] use MATLAB to apply a new objective evaluation method to test whether constructing ecological mining sites at the Pingmei Shenma coal mine in China can help develop the economy, society, and the environment.
- Feng et al. [98], in their research, have used an enhanced ant colony algorithm to improve the tracking accuracy of a hydraulic system of a robotic mining excavator.
6. Hauling Evolution in Mining
- First, the largest two-axle dump truck with a nominal payload of 450 metric tonnes.
- Second, the largest body of the dump truck with a volume of 645.4 cubic meters.

7. Discussion
8. Conclusions
- The development of artificial intelligence allows the ant paradigm to be involved in the design of robotic systems, which will efficiently automate the exploitation process, reducing its environmental footprint. This technology will also help mining in conditions that are difficult for humans, such as the exploitation of underground deposits, especially at great depths, and possible mining in space in the future.
- Ants also have more direct positive effects on mining, such as their use as bioindicators to monitor the impact of mining on the environment.
- They are also used in many cases to locate alluvial gold, as during nest building they have been observed to carry the underground gold to the anthill, revealing a possible underground deposit. This practice has been mentioned in the ancient writings of Herodotus and his gold-digging ant.
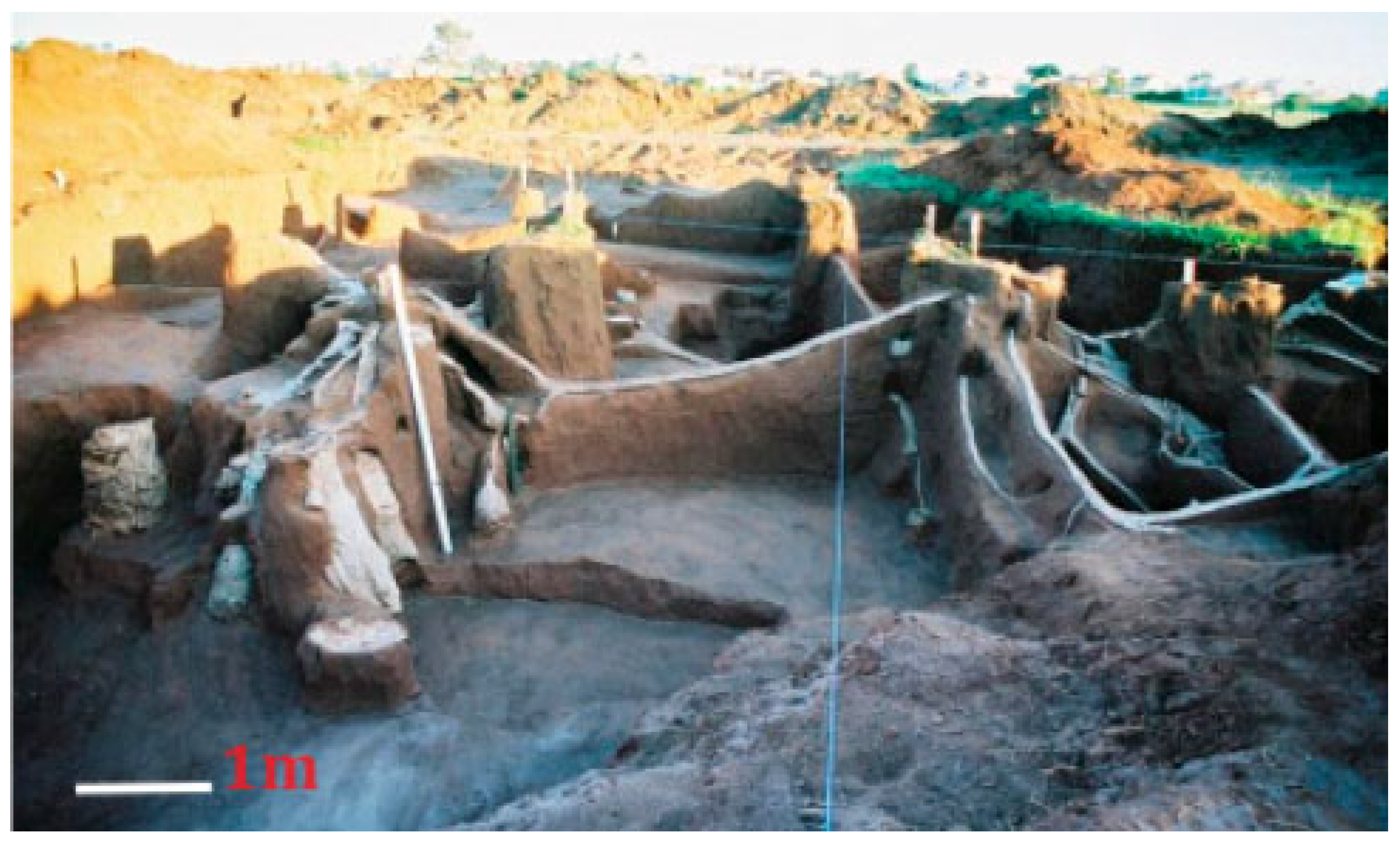
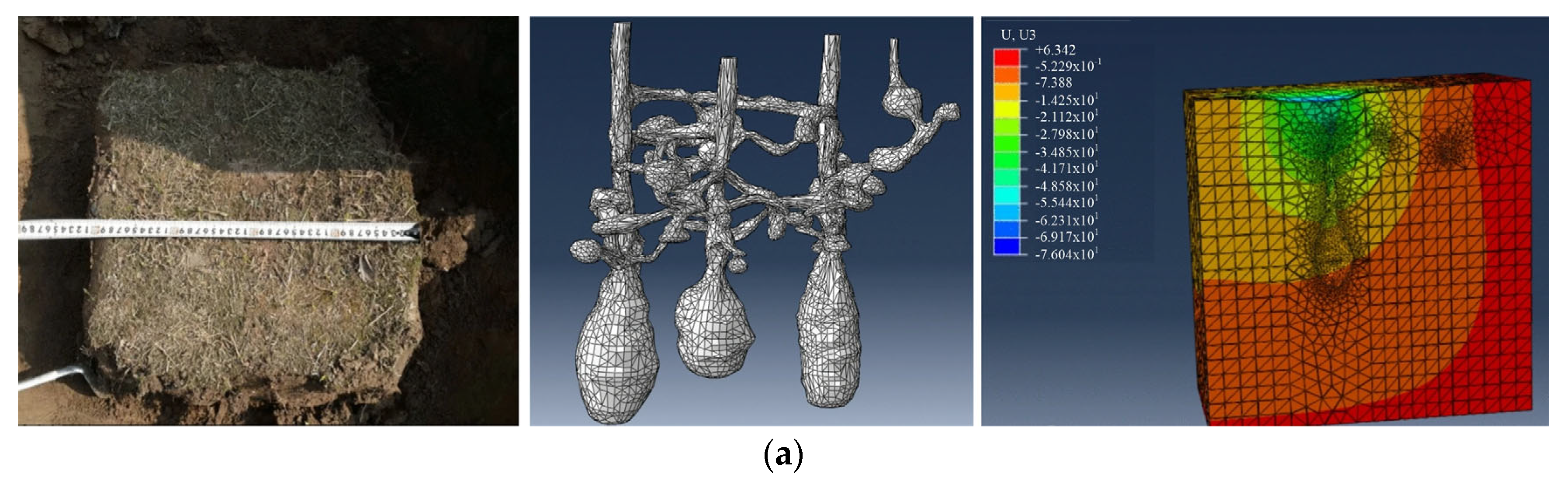
- The technique of creating a mold of ant nests, apart from its visual uses, has helped to create 3D models of the tunnel network and can be used for modelling stability, ventilation, and other parameters critical for mining. In addition, we suggest that the nests can be a first-class analogue experimental setup for determining the actual behavior of geomaterials. Nowadays, numerical models are a powerful simulation tool. However, it is challenging to create 3D models that fully reproduce the physical response as they are based on many assumptions. Although the nests are mainly located in the first soil layers with different mechanical behavior from the humans’ underground excavations, studying ant-nest structures can help improve numerical models.
- The functioning of a colony and how pheromone signals from ants are used to self-organize the “exploration” and transportation of food has been adopted from the mining industry with the ant colony algorithms. Many studies have used these algorithms to improve mining production and hauling processes.
- Despite their small size, ants are pretty efficient miners due to the large number of colony members and their cooperation. There are studies on replacing the “large to small” in size and “few to many” in number mining fleet to meet the needs dictated by the post-coal era.
- Today’s mining technology is focused on the transition to electrification and the creation of autonomous systems. At the same time, research has been concentrated on creating collaborative robotic systems that will, in the future, replace current technologies, enabling the expansion of operations into more challenging environments.
- This work shows that the existing mining technology has many similarities with the ant’s body and has already helped the mining industry in the past years. Furthermore, in the future, the connection that ant colony members have with each other will help to design more efficient autonomous systems.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Viles, H.A.; Goudie, A.S.; Goudie, A.M. Ants as geomorphological agents: A global assessment. Earth Sci. Rev. 2021, 213, 103469. [Google Scholar] [CrossRef]
- Cammeraat, E.L.H.; Risch, A.C. The impact of ants on mineral soil properties and processes at different spatial scales. J. Appl. Entomol. 2008, 132, 285–294. [Google Scholar] [CrossRef]
- Evans, T.A.; Dawes, T.Z.; Ward, P.R.; Lo, N. Ants and termites increase crop yield in a dry climate. Nat. Commun. 2011, 2, 262. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Zhou, W.; Qu, W.; Yao, W.; Zhu, P.; Xu, J. A review of ant nests and their implications for architecture. Buildings 2022, 12, 2225. [Google Scholar] [CrossRef]
- Gren, D., Translator; The History; Translation of Herodotus [c. 430 BC]; University of Chicago Press: Chicago, IL, USA, 1987. [Google Scholar]
- Ancient Greek Language and Literature. The History. Herodotus (-3.97.1-3.105.2). Available online: https://www.greek-language.gr/digitalResources/ancient_greek/library/ (accessed on 5 February 2024).
- Vernier, M. Fertilissimi Sunt Auri Dardae, Setae Vero et Argenti. Notes on some ancient open-air gold mining sites in Ladakh. Études Mongoles Sib. Centrasiatiques Tibét. 2020, 51. [Google Scholar] [CrossRef]
- Ellison, A.M.; Gotelli, N.J. Ants (hymenoptera: Formicidae) and humans: From inspiration and metaphor to 21st-century symbiont. Myrmecol. News 2021, 31, 225–240. [Google Scholar] [CrossRef]
- De Schutter, G.; Theraulaz, G.; Deneubourg, J.L. Animal-Robots collective intelligence. Ann. Math. Artif. Intell. 2001, 31, 223–238. [Google Scholar] [CrossRef]
- Tolvanen, A.; Eilu, P.; Juutinen, A.; Kangas, K.; Kivinen, M.; Markovaara-Koivisto, M.; Naskali, A.; Salokannel, V.; Tuulentie, S.; Similä, J. Mining in the arctic environment—A review from ecological, socioeconomic and legal perspectives. J. Environ. Manag. 2019, 233, 832–844. [Google Scholar] [CrossRef] [PubMed]
- Gubanov, R.S. Development of mining companies in the arctic zone of the Russian federation: Conditions and risks. Ugol 2022, 5, 49–54. [Google Scholar] [CrossRef]
- Xu, H.; Xu, F.; Lin, T.; Xu, Q.; Yu, P.; Wang, C.; Aili, A.; Zhao, X.; Zhao, W.; Zhang, P.; et al. A Systematic Review and Comprehensive Analysis on Ecological Restoration of Mining Areas in the Arid Region of China: Challenge, Capability and Reconsideration. Ecol. Indic. 2023, 154, 110630. [Google Scholar] [CrossRef]
- Riff, M.C.; Moossen, M.; Bonnaire, X. Miner Ants Colony: A New Approach to Solve a Mine Planning Problem. In Proceedings of the Lecture Notes in Computer Science, Istanbul, Turkey, 26–28 October 2005. [Google Scholar]
- Waldner, J.B. Nanocomputers and Swarm Intelligence; Wiley-ISTE: London, UK, 2010. [Google Scholar] [CrossRef]
- Hewawasam, H.S.; Ibrahim, M.Y.; Appuhamillage, G.K. Past, present and future of path-planning algorithms for mobile robot navigation in dynamic environments. IEEE Open J. Ind. Electron. Soc. 2022, 3, 353–365. [Google Scholar] [CrossRef]
- Heyman, Y.; Shental, N.; Brandis, A.; Hefetz, A.; Feinerman, O. Ants regulate colony spatial organization using multiple chemical road-signs. Nat. Commun. 2017, 8, 15414. [Google Scholar] [CrossRef] [PubMed]
- Preve, N. Balanced job scheduling based on ant algorithm for grid network. Int. J. Grid High Perform. Comput. 2010, 2, 34–50. [Google Scholar] [CrossRef]
- Fan, J.; Xie, H.; Chen, J.; Jiang, D.; Li, C.; Ngaha Tiedeu, W.; Ambre, J. Preliminary feasibility analysis of a hybrid pumped-hydro energy storage system using abandoned coal mine Goafs. Appl. Energy 2020, 258, 114007. [Google Scholar] [CrossRef]
- Lyu, X.; Yang, K.; Fang, J.; Tang, J.; Wang, Y. Feasibility study of construction of pumped storage power station using abandoned mines: A case study of the Shitai mine. Energies 2023, 16, 314. [Google Scholar] [CrossRef]
- O’Brien, M.J.; Bentley, R.A. The Role of Food Storage in Human Niche Construction: An Example from Neolithic Europe. Environ. Archaeol. 2015, 20, 364–378. [Google Scholar] [CrossRef]
- Forti, L.C.; de Andrade, A.P.P.; Camargo, R.d.S.; Caldato, N.; Moreira, A.A. Discovering the Giant Nest Architecture of Grass-Cutting Ants, Atta capiguara (Hymenoptera, Formicidae). Insects 2017, 8, 39. [Google Scholar] [CrossRef]
- Gillies, A.D.S.; Mudd, K.E.; Aughenbaugh, N.B. Living conditions in underground houses in Coober Pedy, Australia. In The Potential of Earth-Sheltered and Underground Space; Pergamon: Oxford, UK, 1981. [Google Scholar] [CrossRef]
- Kollarath, R.M.; Raina, S.; Madapur, B. Underground cities: Sustainable urbanism of the future. Int. J. Recent Technol. Eng. 2019, 8, 1754–1757. [Google Scholar] [CrossRef]
- Aydan, Ö.; Ulusay, R. Geomechanical evaluation of Derinkuyu antique underground city and its implications in geoengineering. Rock Mech. Rock Eng. 2013, 46, 731–754. [Google Scholar] [CrossRef]
- Brooks, W.E. Locations of cinnabar-mercury occurrences in Peru: Implications for pre-contact gold production. Archaeol. Discov. 2020, 8, 245–259. [Google Scholar] [CrossRef]
- Monaenkova, D.; Gravish, N.; Rodriguez, G.; Kutner, R.; Goodisman, M.A.D.; Goldman, D.I. Behavioral and mechanical determinants of collective subsurface nest excavation. J. Exp. Biol. 2015, 218, 1295–1305. [Google Scholar] [CrossRef] [PubMed]
- Halboth, F.; Roces, F. The construction of ventilation turrets in Atta Vollenweideri leaf-cutting ants: Carbon dioxide levels in the nest tunnels, but not airflow or air humidity, influence turret structure. PLoS ONE 2017, 12, e0188162. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, F.; Hartlieb, P. Innovation in the Mining Industry: Technological Trends and a Case Study of the Challenges of Disruptive Innovation. Min. Met. Explor. 2020, 37, 1385–1399. [Google Scholar] [CrossRef]
- Zhironkina, O.; Zhironkin, S. Technological and Intellectual Transition to Mining 4.0: A Review. Energies 2023, 16, 1427. [Google Scholar] [CrossRef]
- Koutsopoulou, E.; Servou, A.; Aggelopoulos, G.; Laskaridis, K. Research and Innovation in Exploration and Mining of Raw Materials: The ROBOMINERS Project. Mater. Proc. 2021, 5, 59. [Google Scholar] [CrossRef]
- Lopes, L.; Bodo, B.; Rossi, C.; Henley, S.; Žibret, G.; Kot-Niewiadomska, A.; Correia, V. ROBOMINERS—Developing a Bio-Inspired Modular Robot-Miner for Difficult to Access Mineral Deposits. Adv. Geosci. 2020, 54, 99–108. [Google Scholar] [CrossRef]
- Reimer, T. Larger than Foxes—But smaller than dogs: The gold-digging Ants of Herodotus. Reinardus. Yearb. Int. Reynard Soc. 2007, 19, 167–178. [Google Scholar] [CrossRef]
- Oughton, C.W. Chapter 9: What about the Gold-Digging Ants? The Silences and Irony of Plutarch’s De Herodoti Malignitate. In Plutarch’s Unexpected Silences; Brill: Leiden, The Netherlands, 2023; Volume 10, pp. 151–169. [Google Scholar]
- Stewart, A.D.; Anand, R.R.; Balkau, J. Source of anomalous gold concentrations in termite nests, Moolart Well, Western Australia: Implications for exploration. Geochem. Explor. Environ. Anal. 2012, 12, 327–337. [Google Scholar] [CrossRef]
- Paniz, J.N.G.; Flores, É.M.D.M.; Martins, A.F. Anthill earth as a gold occurrence indicator, and gold determination by solid sampling flame atomic absorption spectrometry. Microchim. Acta 2005, 152, 89–92. [Google Scholar] [CrossRef]
- Stewart, A.D.; Anand, R.R. Anomalies in insect nest structures at the Garden Well gold deposit: Investigation of mound-forming termites, subterranean termites and ants. J. Geochem. Explor. 2014, 140, 77–86. [Google Scholar] [CrossRef]
- Mathioudakis, S.; Xiroudakis, G.; Petrakis, E.; Manoutsoglou, E. Alluvial gold mining technologies from ancient times to the present. Mining 2023, 3, 618–644. [Google Scholar] [CrossRef]
- March, K.; Brewin, R. Ants More Efficient Than Termites in Leading Humans to Gold: Study. Available online: https://www.abc.net.au/ (accessed on 21 January 2024).
- Gold Fever Adventures. Yes Gold in Ant Hills? Testing! Proof Is in the Pan. Available online: https://www.youtube.com/watch?v=v8hS2QjPrXY (accessed on 21 January 2024).
- Yeo, K.; Kouakou, L.M.M.; Touao, M.K.; Gauze, E.; Ouattara, K.; Soro, A.N. Ants response to mining prospection disturbances across vegetation zones in tropical mountain chains of Mount Nimba, Guinea, West Africa. Int. J. Biol. Chem. Sci. 2019, 13, 899. [Google Scholar] [CrossRef]
- Ribas, C.R.; Schmidt, F.A.; Solar, R.R.C.; Campos, R.B.F.; Valentim, C.L.; Schoereder, J.H. Ants as indicators of the success of rehabilitation efforts in deposits of gold mining tailings. Restor. Ecol. 2012, 20, 712–720. [Google Scholar] [CrossRef]
- Andersen, A.N. Ants as indicators of restoration success at a uranium mine in tropical Australia. Restor. Ecol. 1993, 1, 156–167. [Google Scholar] [CrossRef]
- Ottonetti, L.; Tucci, L.; Santini, G. Recolonization patterns of ants in a rehabilitated lignite mine in central Italy: Potential for the use of Mediterranean ants as indicators of restoration processes. Restor. Ecol. 2006, 14, 60–66. [Google Scholar] [CrossRef]
- Fernandes, G.W.; Lana, T.C.; Ribas, C.R.; Schoereder, J.H.; Solar, R.; Majer, J.D.; Cordeiro, E.G.; Delabie, J.H.C.; Vilela, E.F. Changes in epigaeic ant assemblage structure in the Amazon during successional processes after bauxite mining. Sociobiology 2021, 68, 4973. [Google Scholar] [CrossRef]
- Khan, S.R.; Singh, S.K.; Rastogi, N. Heavy Metal Accumulation and Ecosystem Engineering by Two Common Mine Site-Nesting Ant Species: Implications for Pollution-Level Assessment and Bioremediation of Coal Mine Soil. Environ. Monit. Assess. 2017, 189, 195. [Google Scholar] [CrossRef] [PubMed]
- Buchori, D.; Rizali, A.; Rahayu, G.A.; Mansur, I. Insect Diversity in Post-Mining Areas: Investigating Their Potential Role as Bioindicator of Reclamation Success. Biodiversitas 2018, 19, 1696–1702. [Google Scholar] [CrossRef]
- Dvorackova, M.; Pech, P.; Prausová, R.; Horák, J. Diversity of Ant Community in Ore Sedimentation Basin under Different Regimes of Reclamation. Pol. J. Ecol. 2018, 66, 139–152. [Google Scholar] [CrossRef]
- Roivainen, P.; Muurinen, S.M.; Sorvari, J.; Juutilainen, J.; Naarala, J.; Salomaa, S. Transfer of elements into Boreal forest ants at a former uranium mining site. Environ. Pollut. 2022, 304, 119231. [Google Scholar] [CrossRef]
- Kavehei, A.; Gore, D.B.; Wilson, S.P.; Hosseini, M.; Hose, G.C. Assessment of legacy mine metal contamination using ants as indicators of contamination. Environ. Pollut. 2021, 274, 116537. [Google Scholar] [CrossRef] [PubMed]
- Oyekan, J.; Hu, H. Ant robotic swarm for visualizing invisible hazardous substances. Robotics 2013, 2, 1–18. [Google Scholar] [CrossRef]
- Jakubec, J.; Lagace, D.; Boggis, W.; Clark, L.; Lewis, P. Underground Mining at Ekati and Diavik Diamond Mines. In Caving 2018: Proceedings of the Fourth International Symposium on Block and Sublevel Caving, Vancouver, BC, Canada, 5–17 October 2018; Potvin, Y., Jakubec, J., Eds.; Australian Centre for Geomechanics: Perth, WA, Australia, 2018; pp. 73–88. [Google Scholar] [CrossRef]
- Engelking Workers of the World! There Is Efficiency in Idleness. Available online: https://www.discovermagazine.com/ (accessed on 21 January 2024).
- Navidi, S.; Motamedi, M.; Aghsami, A.; Jolai, F. A G/M/C//M Queueing model for revenue management of shovel-truck systems in an open-pit mine considering carbon emission, a case study. Int. J. Manag. Sci. Eng. Manag. 2022, 18, 88–103. [Google Scholar] [CrossRef]
- Paricheh, M.; Osanloo, M. Determination of the Optimum In-Pit Crusher Location in Open-Pit Mining under Production and Operating Cost Uncertainties. In Proceedings of the 16th International Conference on Computer Applications in the Mineral Industries, Instanbul, Turkey, 5–7 October 2016. [Google Scholar]
- Prados-Garzon, J.; Ameigeiras, P.; Ramos-Munoz, J.J.; Navarro-Ortiz, J.; Andres-Maldonado, P.; Lopez-Soler, J.M. Performance modeling of softwarized network services based on queuing theory with experimental validation. IEEE Trans. Mob. Comput. 2021, 20, 1558–1573. [Google Scholar] [CrossRef]
- Frost, J.D.; Roozbahani, M.M.; Jackson, K.; Leonard, L.; Yamamoto, K.; Jones, M.; Martinez, A. Biologically-Inspired Insights into Soil Arching and Tunnel Stability from the Topology of Ant Nests. In Proceedings of the ICSMGE 2017—19th International Conference on Soil Mechanics and Geotechnical Engineering, Seoul, Republic of Korea, 17–21 September 2017. [Google Scholar]
- Qu, W.; Zhou, W.; Zhu, P.; Zhang, Z. Model of underground ant nest structure using static and dynamic finite element analysis. Acta Mech. Solida Sin. 2018, 31, 717–730. [Google Scholar] [CrossRef]
- Yang, G.; Zhou, W.; Xu, J.; Zeng, M.; Kulminskaya, A.A. Static analysis of underground ant nest structures. Appl. Sci. 2022, 12, 12201. [Google Scholar] [CrossRef]
- De Macedo, R.B.; Andò, E.; Joy, S.; Viggiani, G.; Pal, R.K.; Parker, J.; Andrade, J.E. Unearthing real-time 3D ant tunneling mechanics. Proc. Natl. Acad. Sci. USA 2021, 118, e2102267118. [Google Scholar] [CrossRef]
- Vardoulakis, P.; Stavropoulou, M.; Exadaktylos, G. Sandbox modeling of the shallow tunnel face collapse. Riv. Ital. Geotec. 2009, 9–22. [Google Scholar]
- Barakos, G.; De Bueno, M.P.; Luukkanen, S.; Mischo, H.; Zhang, Z.; Gonzalez, M.S.; Holopainen, P.; Remes, A. The Minetrain Project: Developing an Advanced Level Training Program for Mining Industry Professionals in an Actual Deep Mine Site. In Proceedings of the 2019 SME Annual Conference and Expo and CMA 121st National Western Mining Conference, Denver, CO, USA, 24–27 February 2019. [Google Scholar]
- Ptak, M.; Podolska, P.; Podolski, R. Challenges for Science: The Exploitation of Deep Deposits. In Proceedings of the E3S Web of Conferences, Semarang, Indonesia, 8–10 April 2018; Volume 71. [Google Scholar]
- Schafrik, S.; Kolapo, P.; Agioutantis, Z. Development of an Automated Roof Bolting Machine for Underground Coal Mines. In Proceedings of the 32nd SOMP Annual Meeting and Conference, Windhoek, Namibia, 8–14 September 2022; The Southern African Institute of Mining and Metallurgy: Johannesburg, South Africa, 2022. [Google Scholar]
- Cosarinsky, M.I.; Roces, F. The construction of turrets for nest ventilation in the grass-cutting ant Atta vollenweideri: Import and assembly of building materials. J. Insect Behav. 2012, 25, 222–241. [Google Scholar] [CrossRef]
- Bruce, A.I.; Pérez-Escudero, A.; Czaczkes, T.J.; Burd, M. The digging dynamics of ant tunnels: Movement, encounters, and nest space. Insectes Soc. 2019, 66, 119–127. [Google Scholar] [CrossRef]
- Toffin, E.; Di Paolo, D.; Campo, A.; Detrain, C.; Deneubourg, J.L. Shape transition during nest digging in ants. Proc. Natl. Acad. Sci. USA 2009, 106, 18616–18620. [Google Scholar] [CrossRef] [PubMed]
- Tschinkel, W.R. The architecture of subterranean ant nests: Beauty and mystery underfoot. J. Bioecon. 2015, 17, 271–291. [Google Scholar] [CrossRef]
- Banasiewicz, A.; Moosavi, F.; Kotyla, M.; Śliwiński, P.; Krot, P.; Wodecki, J.; Zimroz, R. Forecasting of NOx Emissions of Diesel LHD Vehicles in Underground Mines—An ANN-Based Regression Approach. Appl. Sci. 2023, 13, 9965. [Google Scholar] [CrossRef]
- Made-in-China Buyer Service Team. Available online: https://www.made-in-china.com/ (accessed on 20 February 2024).
- Yeoh, C.E.; Yi, H. Conceptual Design of the combinable legged robot bio-inspired by ants’structure. Appl. Sci. 2021, 11, 1379. [Google Scholar] [CrossRef]
- Mantzareas, K. Kinematic Simulation of Mining—Transport in Surface Exploitation. Diploma Thesis, Technical University of Crete, Crete, Greece, 2024. Unpublished Work. [Google Scholar]
- McKay, G. It’s Not Rocket Science #2: Ventilation. Available online: https://misfitsarchitecture.com/ (accessed on 21 January 2024).
- Yang, G.; Zhou, W.; Xu, J.; Zeng, M.; Wu, S.; You, Y. Ventilation simulation in an underground ant nest structure of Camponotus Japonicus Mayr. Sustainability 2022, 14, 16026. [Google Scholar] [CrossRef]
- VentSim. VentSim 5.0, 3D Mining Ventilation Simulation Software; Howden: Renfrew, UK, 2020. [Google Scholar]
- Wang, E.; Li, X.; Huang, Q.; Wang, G. Research on the influence of natural wind pressure in deep mines on ventilation stability. Adv. Civ. Eng. 2022, 2022, 8789955. [Google Scholar] [CrossRef]
- McPherson, M.J. Subsurface Ventilation Engineering; University of Nottingham, England and University οf California: Berkeley, CA, USA, 2009. [Google Scholar]
- Liang, Y.; Zhang, J.; Ren, T.; Wang, Z.; Song, S. Application of ventilation simulation to spontaneous combustion control in underground coal mine: A case study from Bulianta Colliery. Int. J. Min. Sci. Technol. 2018, 28, 231–242. [Google Scholar] [CrossRef]
- Şuvar, M.; Cioclea, D.; Gherghe, I.; Pǎsculescu, V. Advanced software for mine ventilation networks solving. Environ. Eng. Manag. J. 2012, 11, 1235–1239. [Google Scholar] [CrossRef]
- Shen, G.; Ma, J.; Hu, Y.; Li, J.; Cheng, T.; Wen, J. An air velocity monitor for coal mine ventilation based on vortex-induced triboelectric nanogenerator. Sensors 2022, 22, 4832. [Google Scholar] [CrossRef]
- Guo, P.; He, M.; Zheng, L.; Zhang, N. A Geothermal recycling system for cooling and heating in deep mines. Appl. Therm. Eng. 2017, 116, 833–839. [Google Scholar] [CrossRef]
- Ogunmodede, O.; Lamas, P.; Brickey, A.; Bogin, G.; Newman, A. Underground production scheduling with ventilation and refrigeration considerations. Optim. Eng. 2022, 23, 1677–1705. [Google Scholar] [CrossRef]
- Vosloo, J.; Liebenberg, L.; Velleman, D. Case study: Energy savings for a deep-mine water reticulation system. Appl. Energy 2012, 92, 328–335. [Google Scholar] [CrossRef]
- Du Plessis, G.E.; Liebenberg, L.; Mathews, E.H. Case study: The effects of a variable flow energy saving strategy on a deep-mine cooling system. Appl. Energy 2013, 102, 700–709. [Google Scholar] [CrossRef]
- Rubio, R.F.; Fabregas, A.L.; Carlos, J.; Ubeda, B.; Lorca, D. Underground Mining Drainage. State of the Art. In Proceedings of the International Mine Water Association Symposium, Johannesburg, South Africa, 7–13 September 1998. [Google Scholar]
- Hu, L.; Zhang, M.; Yang, Z.; Fan, Y.; Li, J.; Wang, H.; Lubale, C. Estimating dewatering in an underground mine by using a 3D finite element model. PLoS ONE 2020, 15, e0239682. [Google Scholar] [CrossRef]
- Guzy, A.; Malinowska, A.A. Assessment of the impact of the spatial extent of land subsidence and aquifer system drainage induced by underground mining. Sustainability 2020, 12, 7871. [Google Scholar] [CrossRef]
- Linevich, V.; Monaenkova, D.; Goldman, D.I. Robophysical Study of Excavation in Confined Environments. Artif. Life Robot. 2016, 21, 460–465. [Google Scholar] [CrossRef]
- Ab Wahab, M.N.; Nefti-Meziani, S.; Atyabi, A. A comprehensive review of swarm optimization algorithms. PLoS ONE 2015, 10, e0122827. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Blum, C. Ant colony optimization theory: A survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- Negulescu, S.C.; Kifor, C.V.; Oprean, C. Ant colony solving multiple constrains problem: Vehicle route allocation. Int. J. Comput. Commun. Control 2008, 3, 366. [Google Scholar] [CrossRef]
- Prakasam, A.; Savarimuthu, N. Metaheuristic algorithms and probabilistic behaviour: A comprehensive analysis of ant colony optimization and its variants. Artif. Intell. Rev. 2016, 45, 97–130. [Google Scholar] [CrossRef]
- Song, B.; Miao, H.; Xu, L. Path planning for coal mine robot via improved ant colony optimization algorithm. Syst. Sci. Control Eng. 2021, 9, 283–289. [Google Scholar] [CrossRef]
- Shishvan, M.S.; Sattarvand, J. Long Term production planning of open pit mines by ant colony optimization. Eur. J. Oper. Res. 2015, 240, 825–836. [Google Scholar] [CrossRef]
- Gilani, S.O.; Sattarvand, J. Integrating geological uncertainty in long-term open pit mine production Planning by Ant Colony Optimization. Comput. Geosci. 2016, 87, 31–40. [Google Scholar] [CrossRef]
- Sang, J. A Cost-effective pump scheduling method for mine drainage system based on ant colony optimization. J. Eur. Des. Syst. Autom. 2019, 52, 123–128. [Google Scholar] [CrossRef][Green Version]
- Dabbagh, A.; Bagherpour, R. Development of a match factor and comparison of its applicability with ant-colony algorithm in a heterogeneous transportation fleet in an open-pit mine. J. Min. Sci. 2019, 55, 45–56. [Google Scholar] [CrossRef]
- Wan, L.; Du, C. An Approach to evaluation of environmental benefits for ecological mining areas based on ant colony algorithm. Earth Sci. Inf. 2021, 14, 797–808. [Google Scholar] [CrossRef]
- Feng, H.; Yin, C.; Ma, W.; Yu, H.; Cao, D. Parameters Identification and Trajectory Control for a Hydraulic System. ISA Trans. 2019, 92, 228–240. [Google Scholar] [CrossRef] [PubMed]
- Galetakis, M.; Vasileiou, A.; Rogdaki, A.; Deligiorgis, V.; Raka, S. Estimation of mineral resources with machine learning techniques. Mater. Proc. 2022, 5, 122. [Google Scholar] [CrossRef]
- Fang, B. Method for quickly identifying mine water inrush using convolutional neural network in coal mine safety mining. Wirel. Pers. Commun. 2022, 127, 945–962. [Google Scholar] [CrossRef]
- Dagasan, Y.; Renard, P.; Straubhaar, J.; Erten, O.; Topal, E. Automatic parameter tuning of multiple-point statistical simulations for lateritic bauxite deposits. Minerals 2018, 8, 220. [Google Scholar] [CrossRef]
- Wang, H.; Tenorio, V.; Li, G.; Hou, J.; Hu, N. Optimization of trackless equipment scheduling in underground mines using genetic algorithms. Min. Met. Explor. 2020, 37, 1531–1544. [Google Scholar] [CrossRef]
- Palogos, I.; Galetakis, M.; Roumpos, C.; Pavloudakis, F. Selection of optimal land uses for the reclamation of surface mines by using evolutionary algorithms. Int. J. Min. Sci. Technol. 2017, 27, 491–498. [Google Scholar] [CrossRef]
- Rokbak. Our History Carved by a Lifetime of Hard Work. Available online: https://www.rokbak.com/our-history/ (accessed on 6 February 2024).
- Bozorgebrahimi, E.; Hall, R.A.; Blackwell, G.H. Sizing equipment for open pit mining—A review of critical parameters. Min. Technol. 2003, 112, 171–179. [Google Scholar] [CrossRef]
- BELAZ. The Major Manufacturer of Heavy Duty Mining Dump Trucks. Available online: https://belaz.by/en/ (accessed on 12 February 2024).
- Müller, U. How Downsizing through Autonomy Is Changing the Game in Mines and Quarries. Available online: https://www.volvoautonomoussolutions.com (accessed on 17 February 2024).
- Knights, P.; Franklin, D. Autonomous Surface Mining Equipment: Is Bigger Better? In Proceedings of the 2010 Australian Mining Technology Conference: “Technology Changing the Mining Business Footprint”, Perth, WA, Australia, 13–15 September 2010; CRC Mining: Pinjarra Hills, QLD, Australia, 2010. [Google Scholar]
- Khazin, M.L. Directions of career transport development. Perm J. Pet. Min. Eng. 2021, 21, 144–150. [Google Scholar] [CrossRef]
- Feng, Y.; Dong, Z. Optimal energy management with balanced fuel economy and battery life for large hybrid electric mining truck. J. Power Sources 2020, 454, 227948. [Google Scholar] [CrossRef]
- Digging Deep. Trolley Assist Haulage Systems: Championing Decarbonization of the Mining Industry. Available online: https://www.linkedin.com/ (accessed on 7 February 2024).
- eMining. Zero Emission Mining. Available online: www.emining.ch (accessed on 24 February 2024).
- Graham Rapier. This Massive 45-Ton Electric Dump Truck Never Uses More Energy Than It Generates on Its Own—Here’s How That Works. Available online: https://www.businessinsider.com/edumper-121-ton-electric-dump-truck-2019-8 (accessed on 11 February 2024).
- Lindgren, L.; Grauers, A.; Ranggård, J.; Mäki, R. Drive-cycle simulations of battery-electric large haul trucks for open-pit mining with electric roads. Energies 2022, 15, 4871. [Google Scholar] [CrossRef]
- Rubenstein, M.; Ahler, C.; Nagpal, R. Kilobot: A Low Cost Scalable Robot System for Collective Behaviors. In Proceedings of the Proceedings—IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Castelló Ferrer, E. The Blockchain: A New Framework for Robotic Swarm Systems. In Proceedings of the Advances in Intelligent Systems and Computing, Cairo, Egypt, 26–28 October 2019; Volume 881. [Google Scholar]
- Leah, V. BionicANTS Work Together in Swarm Artificial Intelligence. Available online: https://www.machinedesign.com/ (accessed on 21 January 2024).
- Pell, R. AI-Powered Swarm Robots Aim to Disrupt Mining Industry. Available online: https://www.eenewseurope.com/ (accessed on 21 January 2024).
- Na, S.; Qiu, Y.; Turgut, A.E.; Ulrich, J.; Krajník, T.; Yue, S.; Lennox, B.; Arvin, F. Bio-inspired artificial pheromone system for swarm robotics applications. Adapt. Behav. 2021, 29, 395–415. [Google Scholar] [CrossRef]
- Na, S.; Niu, H.; Lennox, B.; Arvin, F. Universal Artificial Pheromone Framework with Deep Reinforcement Learning for Robotic Systems. In Proceedings of the 2021 6th International Conference on Control and Robotics Engineering, ICCRE 2021, Beijing, China, 16–18 April 2021. [Google Scholar]
- Kilic, C.; Bernardo Martinez, R.; Tatsch, C.A.; Beard, J.; Strader, J.; Das, S.; Ross, D.; Gu, Y.; Pereira, G.A.S.; Gross, J.N. NASA space robotics challenge 2 qualification round: An approach to autonomous lunar rover operations. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 24–41. [Google Scholar] [CrossRef]
- Dubinkin, D.; Sadovets, V.; Syrkin, I.; Chicherin, I. Assessment of the Need to Create Control Sytem of Unmanned Dump Truck. E3S Web Conf. 2020, 177, 03022. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiroudakis, G.; Saratsis, G.; Manoutsoglou, E. The Smallest “Miner” of the Animal Kingdom and Its Importance for Raw Materials Exploitation. Mining 2024, 4, 260-283. https://doi.org/10.3390/mining4020016
Xiroudakis G, Saratsis G, Manoutsoglou E. The Smallest “Miner” of the Animal Kingdom and Its Importance for Raw Materials Exploitation. Mining. 2024; 4(2):260-283. https://doi.org/10.3390/mining4020016
Chicago/Turabian StyleXiroudakis, George, George Saratsis, and Emmanouil Manoutsoglou. 2024. "The Smallest “Miner” of the Animal Kingdom and Its Importance for Raw Materials Exploitation" Mining 4, no. 2: 260-283. https://doi.org/10.3390/mining4020016
APA StyleXiroudakis, G., Saratsis, G., & Manoutsoglou, E. (2024). The Smallest “Miner” of the Animal Kingdom and Its Importance for Raw Materials Exploitation. Mining, 4(2), 260-283. https://doi.org/10.3390/mining4020016