
FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories †

 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Detection of Trees and Estimation of dbh
2.2. Computation of Variables and Metrics Related to Attributes Estimated in FIs at the Stand Level
2.2.1. Field Measurements Not Available
2.2.2. Field Measurements Available
3. Results
3.1. Detection of Trees and Estimation of Their dbh
3.2. Computation of Variables and Metrics Related to Attributes Estimated in FIs at Stand Level
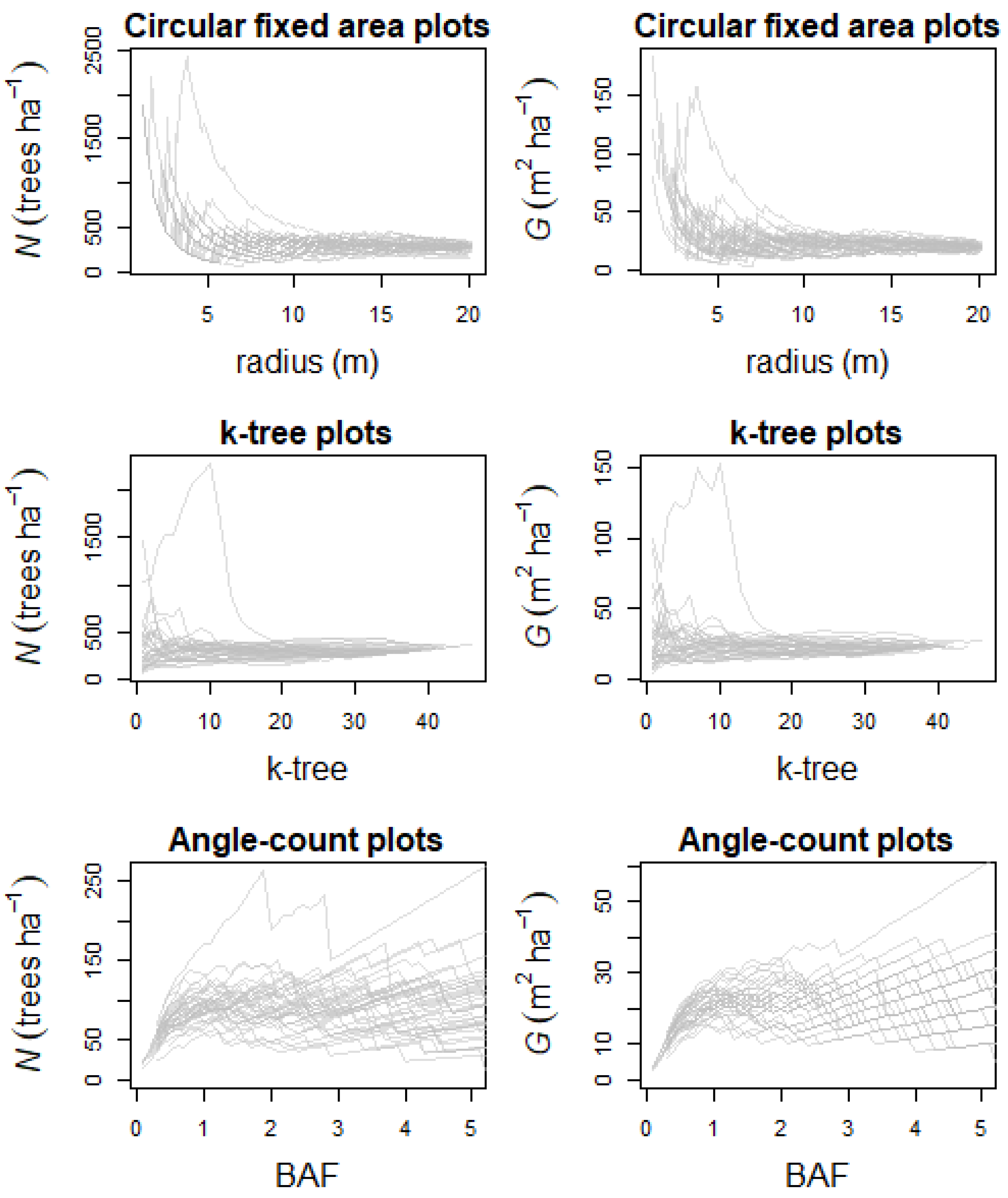
3.2.1. Plot Design When Field Measurements Are Not Available
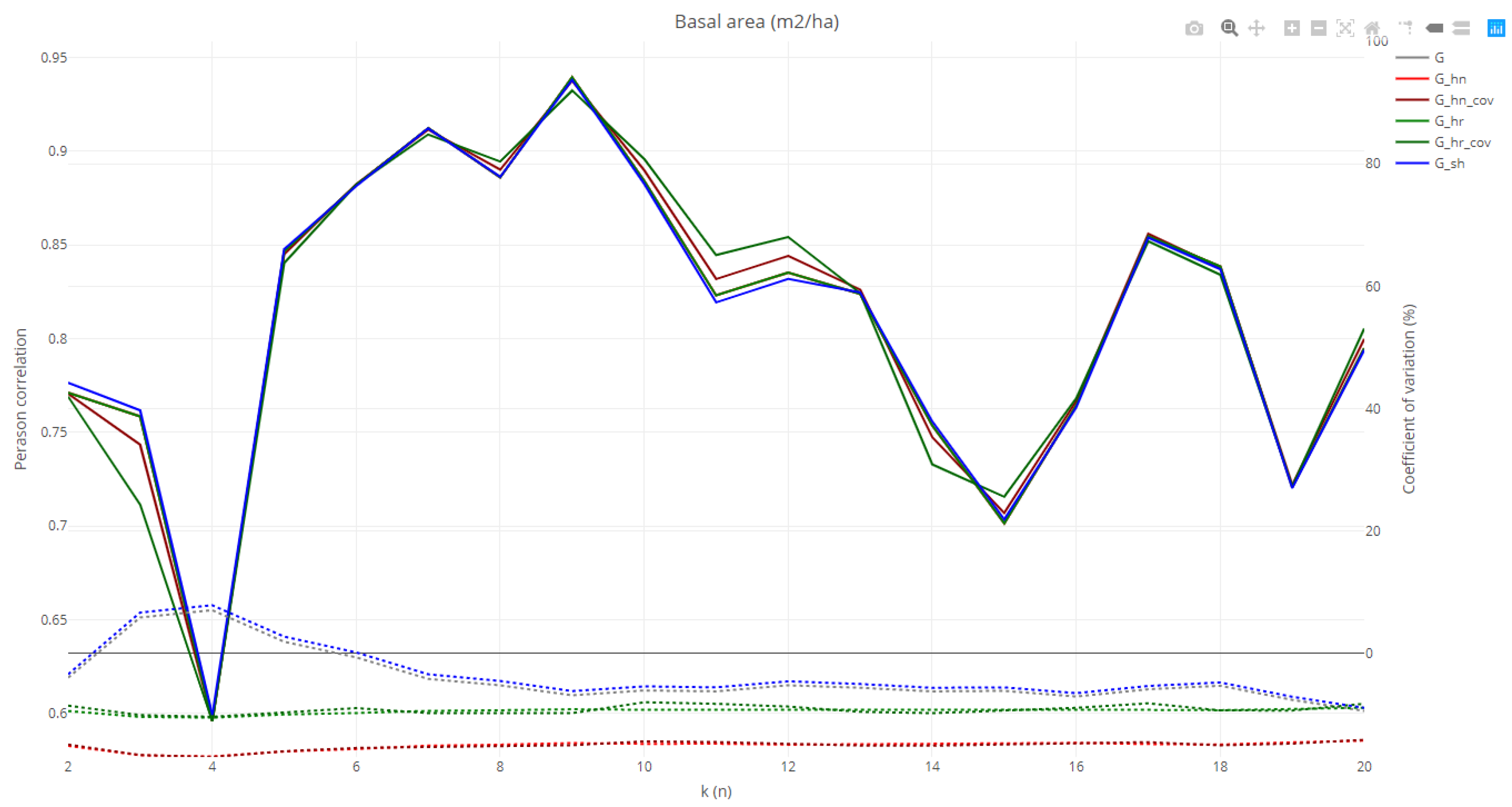
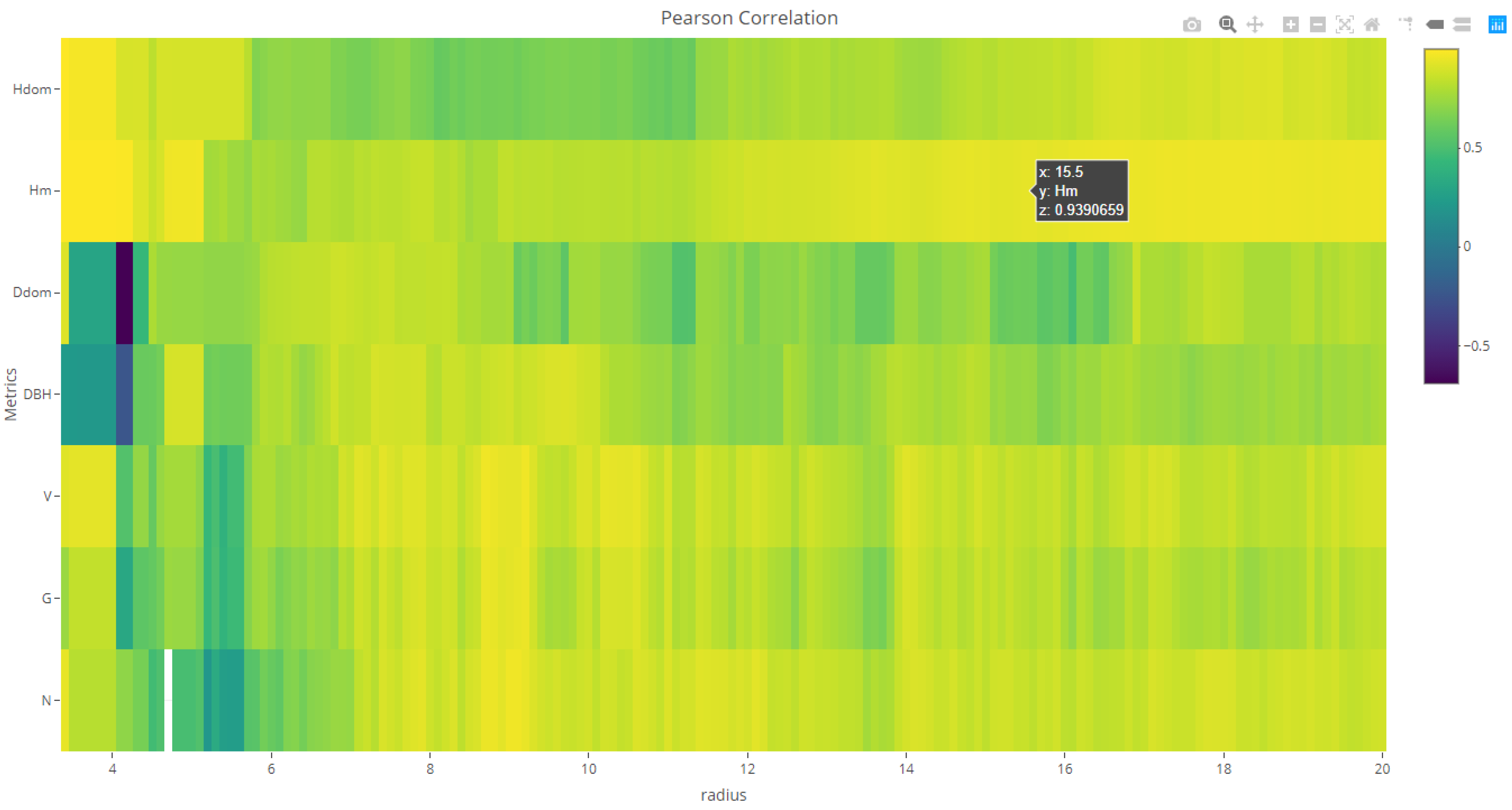
3.2.2. Plot Design When Field Measurements Are Available
4. Discussion
Funding
Data Availability Statement
Acknowledgments
References
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote sensing technologies for enhancing forest inventories: A review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; Holopainen, M.; Vastaranta, M. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Newnham, G.J.; Armston, J.D.; Calders, K.; Disney, M.I.; Lovell, J.L.; Schaaf, C.B.; Strahler, A.H.; Danson, F.M. Terrestrial laser scanning for plot-scale forest measurement. Curr. For. Rep. 2015, 1, 239–251. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Hyyppa, J.; Lehtomäki, M.; Pyorala, J.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Wang, Y. In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 143, 97–107. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Trochta, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An efficient open source tool to build tree models from TLS clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Trochta, J.; Krůček, M.; Vrška, T.; Král, K. 3D Forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PLoS ONE 2017, 12. [Google Scholar] [CrossRef]
- Bienert, A.; Scheller, S.; Keane, E.; Mohan, F.; Nugent, C. Tree detection and diameter estimations by analysis of forest terrestrial lasers canner point clouds. ISPRS Workshop Laser Scanning 2007, 36, 50–55. [Google Scholar]
- Molina Valero, J.A.; Ginzo Villamayor, M.J.; Novo Pérez, M.A.; Álvarez-González, J.G.; Pérez-Cruzado, C. Estimación del área basimétrica en masas maduras de Pinus sylvestris en base a una única medición del escáner láser terrestre (TLS). Cuad. De La Soc. Española De Cienc. For. 2019, 45, 97–116. [Google Scholar] [CrossRef]
- Seidel, D.; Ammer, C. Efficient measurements of basal area in short rotation forests based on terrestrial laser scanning under special consideration of shadowing. Iforest-Biogeosci. For. 2014, 7, 227. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.; E Woodcock, C.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (Echidna®). Can. J. Remote Sens. 2008, 34 (Suppl. 2), S426–S440. [Google Scholar] [CrossRef]
- Astrup, R.; Ducey, M.J.; Granhus, A.; Ritter, T.; von Lüpke, N. Approaches for estimating stand-level volume using terrestrial laser scanning in a single-scan mode. Can. J. For. Res. 2014, 44, 666–676. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| id | file | Tree | x y | phi phi.left phi.right | dbh Horizontal.Distance | num.points num.points.est num.points.hom num.points.hom.est | partial.occlusion |
|---|---|---|---|---|---|---|---|
| numeric/ character | character (id.txt) | numeric (n) | numeric (m) | numeric (rad) | numeric (m) | numeric (n) | numeric (0–1) |
| N | G | V | dbhm | dbh0 | Number of Points Belonging to Normal Sections | Percentiles | |
|---|---|---|---|---|---|---|---|
| fix.plot k.tree angle.count | N N.hn 1 N.hr 1 N.hn.cov1 N.hr.cov 1 N.sh 1 N.corr 2 | G G.hn 1 G.hr 1 G.hn.cov 1 G.hr.cov 1 G.sh1 G.corr 2 | V V.hn 1 V.hr 1 V.hn.cov 1 V.hr.cov 1 V.sh 1 V.corr 2 | dbh.arit dbh.sqrt dbh.geom dbh.harm | dbh.dom.arit dbh.dom.sqrt dbh.dom.geom dbh.dom.harm | num.points num.points.est num.points.hom num.points.hom.est | P1, P5, P10, P20, P25, P30, P40, P50, P60, P70, P75, P80, P90, P95, P99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Valero, J.A.; Villamayor, M.J.G.; Pérez, M.A.N.; Álvarez-González, J.G.; Montes, F.; Martínez-Calvo, A.; Pérez-Cruzado, C. FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories. Environ. Sci. Proc. 2021, 3, 38. https://doi.org/10.3390/IECF2020-08066
Molina-Valero JA, Villamayor MJG, Pérez MAN, Álvarez-González JG, Montes F, Martínez-Calvo A, Pérez-Cruzado C. FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories. Environmental Sciences Proceedings. 2021; 3(1):38. https://doi.org/10.3390/IECF2020-08066
Chicago/Turabian StyleMolina-Valero, Juan Alberto, Maria José Ginzo Villamayor, Manuel Antonio Novo Pérez, Juan Gabriel Álvarez-González, Fernando Montes, Adela Martínez-Calvo, and César Pérez-Cruzado. 2021. "FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories" Environmental Sciences Proceedings 3, no. 1: 38. https://doi.org/10.3390/IECF2020-08066
APA StyleMolina-Valero, J. A., Villamayor, M. J. G., Pérez, M. A. N., Álvarez-González, J. G., Montes, F., Martínez-Calvo, A., & Pérez-Cruzado, C. (2021). FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories. Environmental Sciences Proceedings, 3(1), 38. https://doi.org/10.3390/IECF2020-08066