
Real-Time 3D and Archaeology: A Status Report †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. RGBDemo
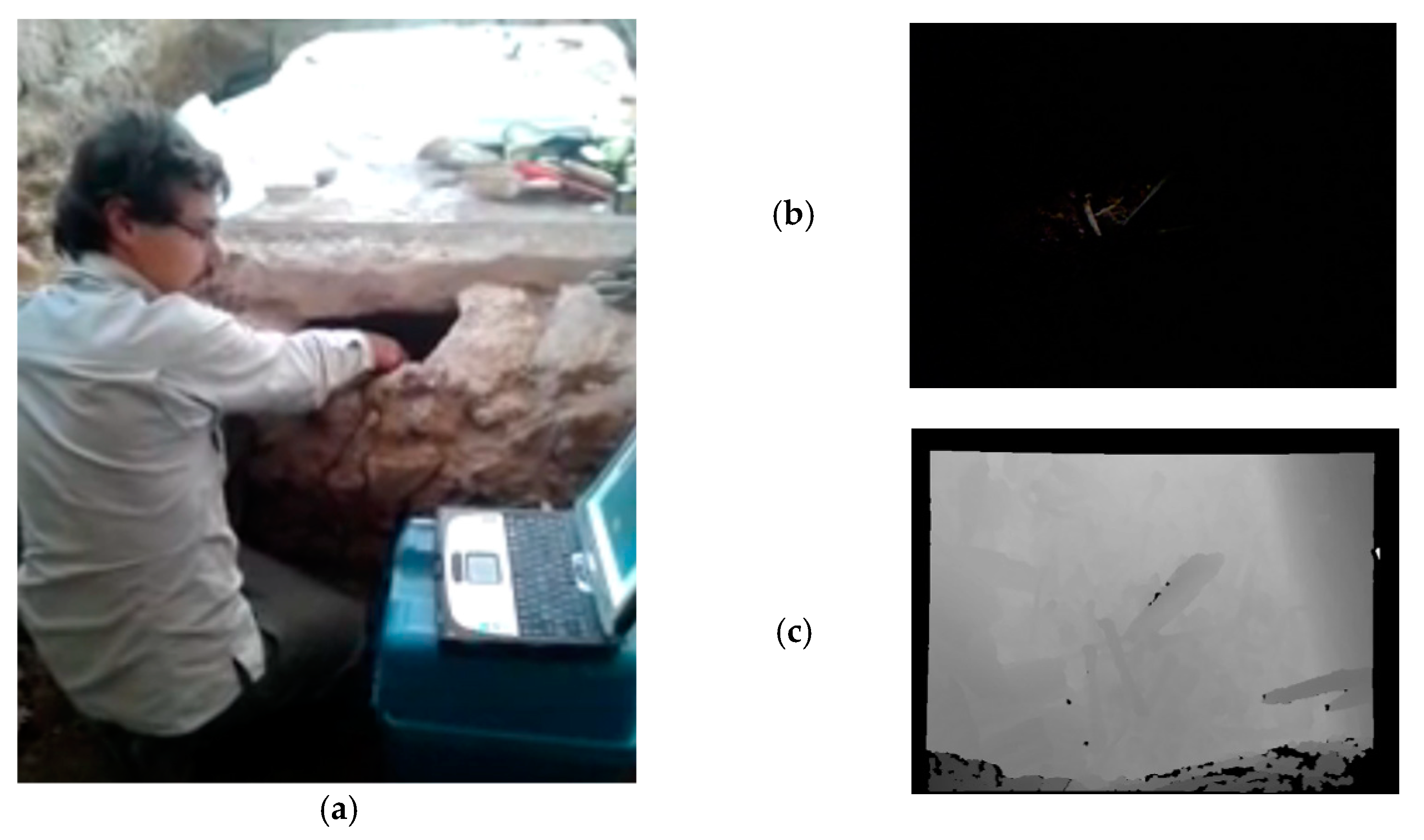
2.1. First Test and Technical Validation
2.2. Limitations, Potentialities and Professional Use
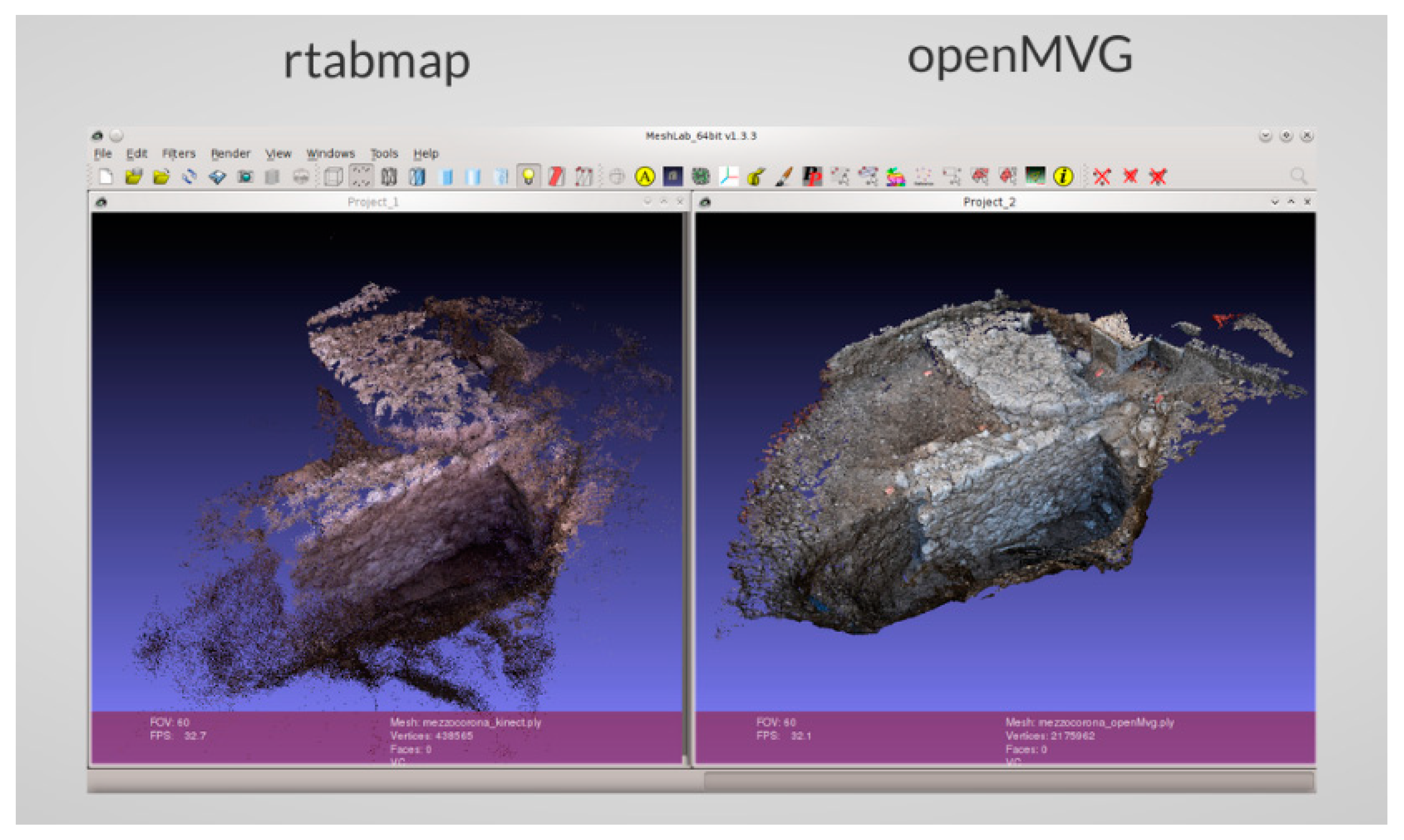
3. SLAM-Based Technologies
3.1. A New Approach to Real-Time 3D: Validation, Limitations and Its Potentialities
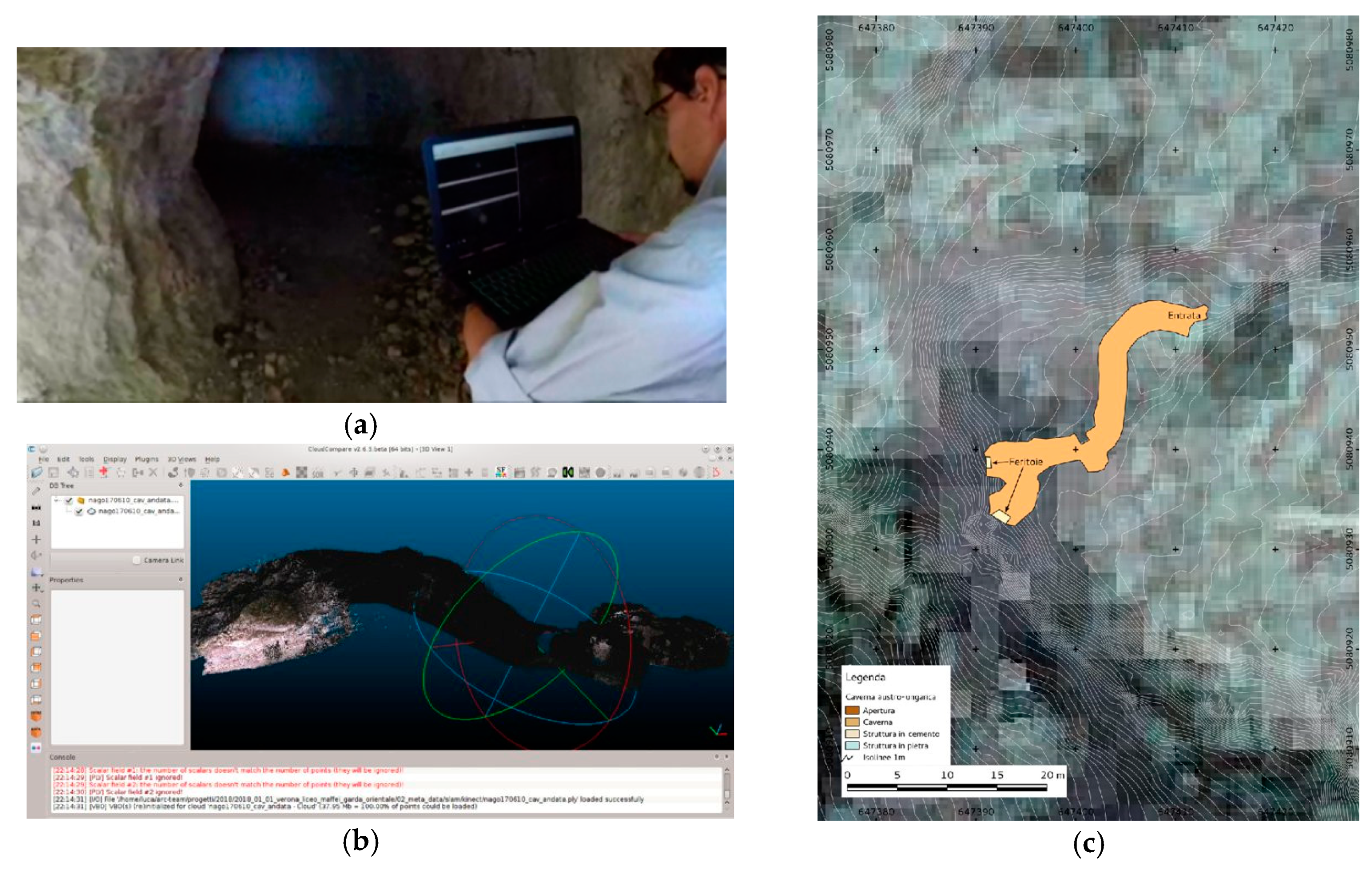
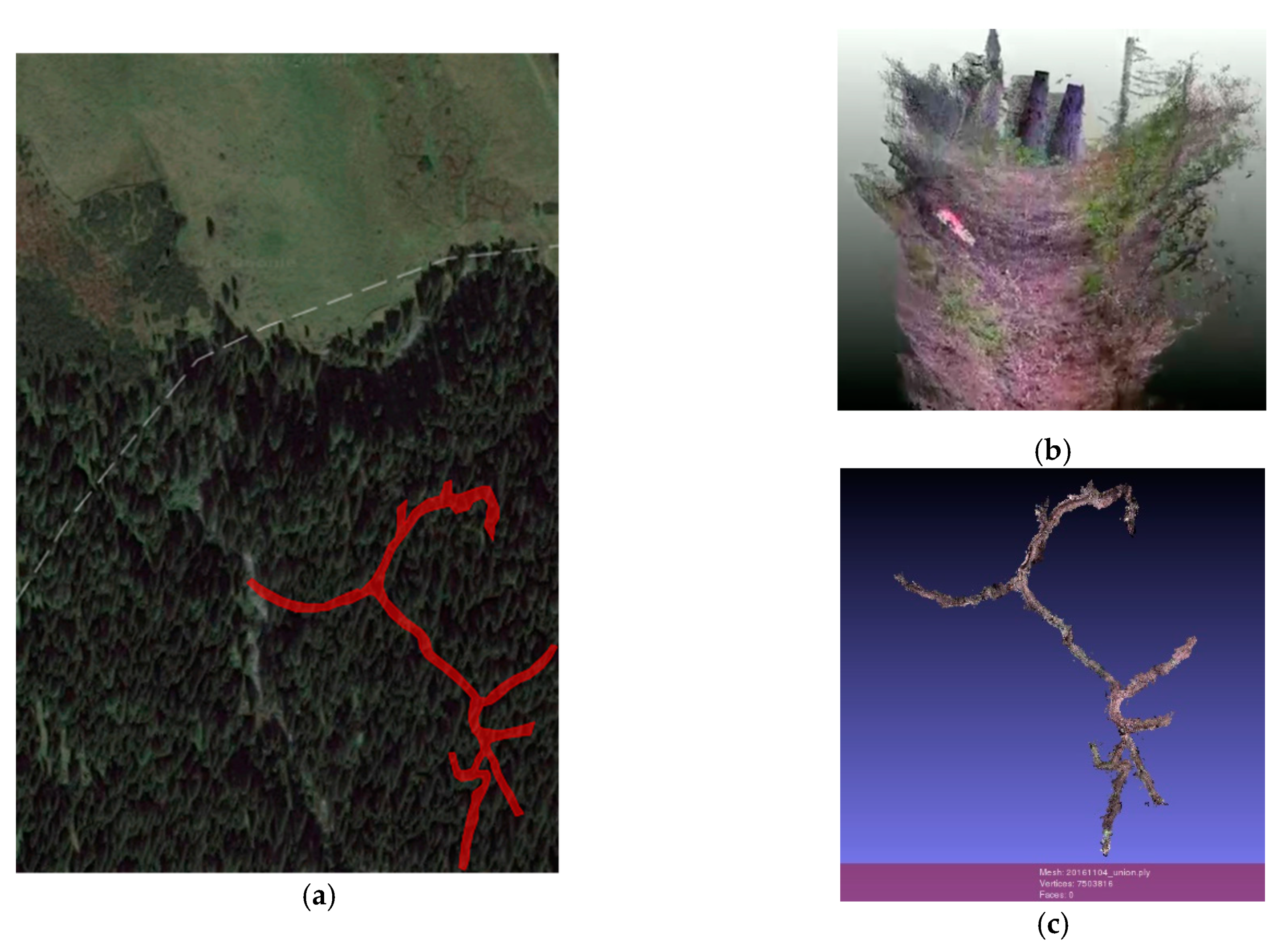
3.2. SLAM for Professional Archaeology
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Simultaneous Localization and Mapping. Available online: https://en.wikipedia.org/w/index.php?title=Simultaneous_localization_and_mapping&oldid=1007538558 (accessed on 25 February 2021).
- Bezzi, A.; Bezzi, L.; Francisci, D.; Furnari, F. ArcheOS 4.0–“Caesar”: Novità e aspetti della distribuzione GNU/Linux dedicata all’archeologia. In Proceedings of the ArcheoFOSS. Free, Libre and Open Source Software e Open Format nei Processi di Ricerca Archeologica-Atti del VII Workshop, Rome, Italy, 11–13 June 2012; Serlorenzi, M., Ed.; All’Insegna del Giglio: Florence, Italy, 2013; pp. 165–173. [Google Scholar]
- Bezzi, L.; Bezzi, A.; Gietl, R.; Naponiello, G.; Feistmantl, K. Archeorobotics. Applicazioni robotiche aperte e archeologia estrema. In Proceedings of the ArcheoFOSS. Free, Libre and Open Source Software e Open Format nei Processi di Ricerca Archeologica–Atti del XII Workshop, Rome, Italy, 19–22 February 2018; Grossi, P., Costa, S., Jaja, A., Malatesta, S.G., Stasolla, F.R., Eds.; All’Insegna del Giglio: Florence, Italy, 2019; pp. 467–470. [Google Scholar]
- Archaeological Tolerance. Available online: http://arc-team-open-research.blogspot.com/2021/02/archaeological-tolerance.html (accessed on 26 February 2021).
- Kinect, Real Time 3D. Available online: http://arc-team-open-research.blogspot.com/2012/02/kinect-real-time-3d.html (accessed on 26 February 2021).
- Kinect Accuracy and Precision with RGBDemo. Available online: http://arc-team-open-research.blogspot.com/2012/03/kinect-accuracy-and-precision-with.html (accessed on 1 March 2021).
- Bezzi, A.; Bezzi, L.; Ducke, B. Computer Vision e Structure from Motion, nuove metodologie per la documentazione archeologica tridimensionale: Un approccio aperto. In Proceedings of the ArcheoFOSS. Free, Libre and Open Source Software e Open Format nei Processi di Ricerca Archeologica–Atti del V Workshop, Foggia, Italy, 6–7 May 2010; De Felice, G., Sibilano, M.G., Eds.; Edipuglia: Santo Spirito, Italy, 2011; pp. 103–111. [Google Scholar]
- Kinect 3D Limits: Documentation of Small Objects. Available online: http://arc-team-open-research.blogspot.com/2012/11/kinect-3d-limits-documentation-of-small.html (accessed on 1 March 2021).
- Bezzi, A.; Bezzi, L.; Moraes, C.; Carrara, N.; Tiziani, M. Analisi di uno studio open source: Il Taung Project. In Proceedings of the ArcheoFOSS. Free, Libre and Open Source Software e Open Format nei Processi di Ricerca Archeologica–Atti dell’VIII Workshop, Catania, Italy, 18–19 June 2013; Stanco, F., Gallo, G., Eds.; Archeopress: Oxford, UK, 2016; pp. 230–239. [Google Scholar]
- Kinect 3D Outdoor: Hacking the Hardware. Available online: http://arc-team-open-research.blogspot.com/2012/10/kinect-3d-outdoor-hacking-hardware.html (accessed on 2 March 2021).
- Bezzi, L.; Carrara, N.; Nebl, M. Imago Animi. Volti dal Passato, 1st ed.; Municipality of Cles: Cles, Italy, 2018. [Google Scholar]
- Kinect 3D Outdoor: First Test. Available online: http://arc-team-open-research.blogspot.com/2012/10/kinect-3d-outdoor-first-test.html (accessed on 2 March 2021).
- Dalla Mura, M.; Aravecchia, M.; Zanin, M. Outdoor 3D with Kinect: Preliminary resultsin the granulometry of fluvial sediments. In Proceedings of the Low Cost 3D: Sensori, Algoritmi e Applicazioni, Trento, Italy, 8–9 March 2012. [Google Scholar]
- Kinect 3D Indoor: Excavation Test. Available online: http://arc-team-open-research.blogspot.com/2012/10/kinect-3d-indoor-excavation-test.html (accessed on 2 March 2021).
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiani, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. In Proceedings of the 6th Eurographics Italian Chapter Conference, Salerno, Italy, 2–4 July 2008; Scarano, V., De Chiara, R., Erra, U., Eds.; Eurographics Association: Aire-la-Ville, CH, USA, 2008; pp. 129–136. [Google Scholar]
- Kinect-Infrared Prospections. Available online: http://arc-team-open-research.blogspot.com/2013/06/kinect-infrared-prospections.html (accessed on 2 March 2021).
- A DIY Endoscope for Emergencies during Excavation Fieldwork. Available online: http://arc-team-open-research.blogspot.com/2011/07/diy-endoscpe-for-emergencies-during.html (accessed on 3 March 2021).
- Kinect, a Sleeping Research Branch Reacivated. Available online: http://arc-team-open-research.blogspot.com/2016/08/kinect-sleeping-research-branch.html (accessed on 3 March 2021).
- Bezzi, L.; Bezzi, A.; Nascivera, S.; Paissan, F.; Perghem, D.; Reyes, A.; Rocco, E.; Saiani, A. ArcheoROVUn ROV open hardware sviluppato specificatamente perscopi archeologici. In Proceedings of the ArcheoFOSS. Free, Libre and Open Source Software e Open Format nei Processi di Ricerca Archeologica–Atti dell’XI Workshop, Cagliari, Italy, 7–9 October 2016. (under review; accepted). [Google Scholar]
- ROS and Professional Archaeology. Available online: http://arc-team-open-research.blogspot.com/2017/04/ros-and-professional-archaeology.html (accessed on 3 March 2021).
- Bezzi, L.; Bezzi, A.; Boscaro, C.; Feistmantl, K.; Gietl, R.; Naponiello, G.; Ottati, F.; de Guzman, M. Commercial Archaeology and 3D WebTechnologies. JFA 2018, 43, 545–559. [Google Scholar] [CrossRef] [Green Version]
- ArcheOS Hypatia and Archeorobotics: ROS for 3D Dynamic Documentations. Available online: http://arc-team-open-research.blogspot.com/2017/04/archeos-hypatia-and-archeorobotics-ros.html (accessed on 3 March 2021).
- Bezzi, L.; Bezzi, A.; Gietl, R.; Feistmantl, K.; Naponiello, G. La villa romana dei Nonii Arrii a Toblino. Tecniche archeologiche applicate alla ricerca. AdA 2018, 4, 155–162. [Google Scholar]
- Bezzi, L.; Gietl, R.; Bonfanti, F.; Bezzi, A.; Naponiello, G.; Feistmantl, K. La Grande Guerra sul Garda orientale. Un progetto di archelogia del conflitto. In La Grande Guerra sul Garda Orientale. Operazioni Belliche e Vicende Militari sul lago e L’entroterra Montano, 1st ed.; Bonfanti, F., Ferrari, R., Eds.; Edibus: Vicenza, Italy, 2018; pp. 173–207. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bezzi, L.; Bezzi, A.; Gietl, R.; Naponiello, G.; Feistmantl, K. Real-Time 3D and Archaeology: A Status Report. Environ. Sci. Proc. 2021, 10, 16. https://doi.org/10.3390/environsciproc2021010016
Bezzi L, Bezzi A, Gietl R, Naponiello G, Feistmantl K. Real-Time 3D and Archaeology: A Status Report. Environmental Sciences Proceedings. 2021; 10(1):16. https://doi.org/10.3390/environsciproc2021010016
Chicago/Turabian StyleBezzi, Luca, Alessandro Bezzi, Rupert Gietl, Giuseppe Naponiello, and Kathrin Feistmantl. 2021. "Real-Time 3D and Archaeology: A Status Report" Environmental Sciences Proceedings 10, no. 1: 16. https://doi.org/10.3390/environsciproc2021010016
APA StyleBezzi, L., Bezzi, A., Gietl, R., Naponiello, G., & Feistmantl, K. (2021). Real-Time 3D and Archaeology: A Status Report. Environmental Sciences Proceedings, 10(1), 16. https://doi.org/10.3390/environsciproc2021010016