2. System Configurations
The system under consideration is illustrated in
Figure 1. It can be observed that it features two arrows: one pointing to the left, indicating the offshore side, and the other pointing to the right, representing the onshore network. It consists of an OWPP connected to a transformer that steps up the voltage to 230 kV. The transmission system includes an HVAC submarine cable and shunt reactive power compensation components distributed along the line. These shunt components are varied across the different configurations studied in this work. The system is then connected to an onshore local network. For this specific study, an aggregated wind farm model is used, encapsulating both the OWPP and the offshore transformer.
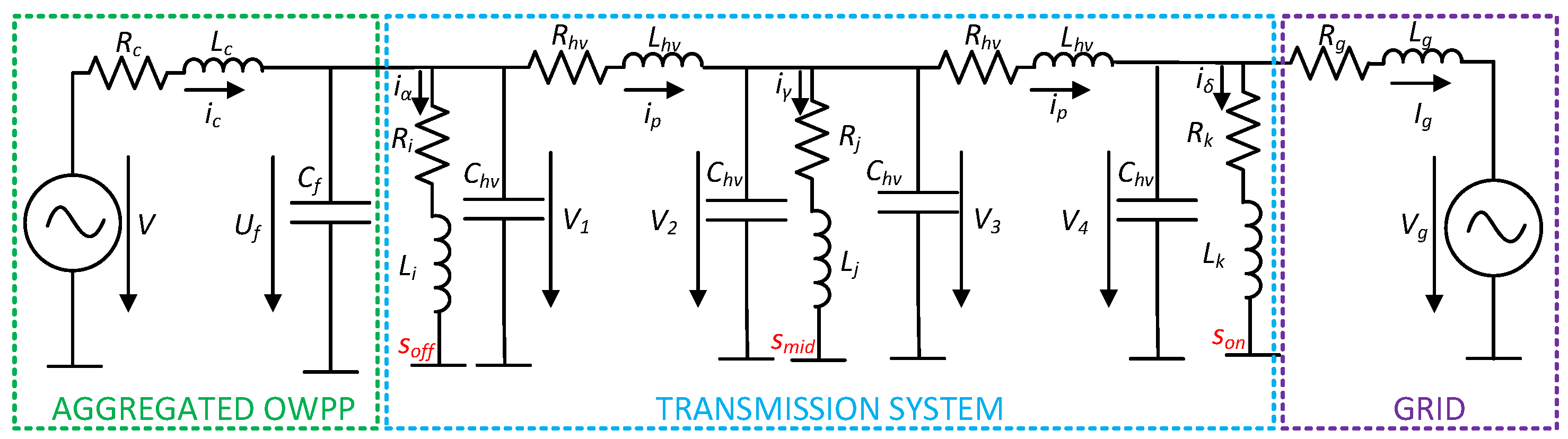
The detailed modelling approach for the system is shown in
Figure 2. The aggregated OWPP is represented as a voltage source with voltage
V and an
LC filter characterized by parameters
and
. This impedance accounts for the contribution of the park transformer. The transmission system comprises an HVAC submarine cable with shunt reactive power compensation components, which manage the capacitive reactive power of the long cable. These shunt components are further explained in
Appendix A. The electrical grid is represented by a Thevenin equivalent, defined by voltage
, resistance
, and inductance
. This model is used to analyse the stability and performance of the system under various operational scenarios.
The export cable was modeled using a
-equivalent circuit with parameters
,
, and
. For simplicity and because this study focuses on small-signal analysis, the shunt compensations are modeled as reactors, with their values calculated based on the amount of reactive power to be compensated. The parameters used in this study may be seen in
Table A2 of
Appendix B.
Several hardware arrangements for export cables with shunt compensation were examined, focusing on the different numbers and locations of the shunt reactors. This section describes how these setups affect the voltage profiles for various cable lengths as well as the power factor. The shunt compensation can be placed in three locations: at the sending end of the cable immediate after the OWPP (), in the middle of the cable (), or at the receiving end, onshore ().
Three different arrangements were identified, as listed in
Table 1. In arrangement A1, shunt compensations are placed at both the offshore PCC and onshore PCC. Arrangement A2 involved shunt reactors located offshore, mid-cable, and onshore. In arrangement A3, a single shunt reactor was positioned onshore. The shunt reactors were sized as described in
Appendix A and their final values for the different arrangements, A1, A2 and A3, and for the different cable lengths are shown in
Table A1.
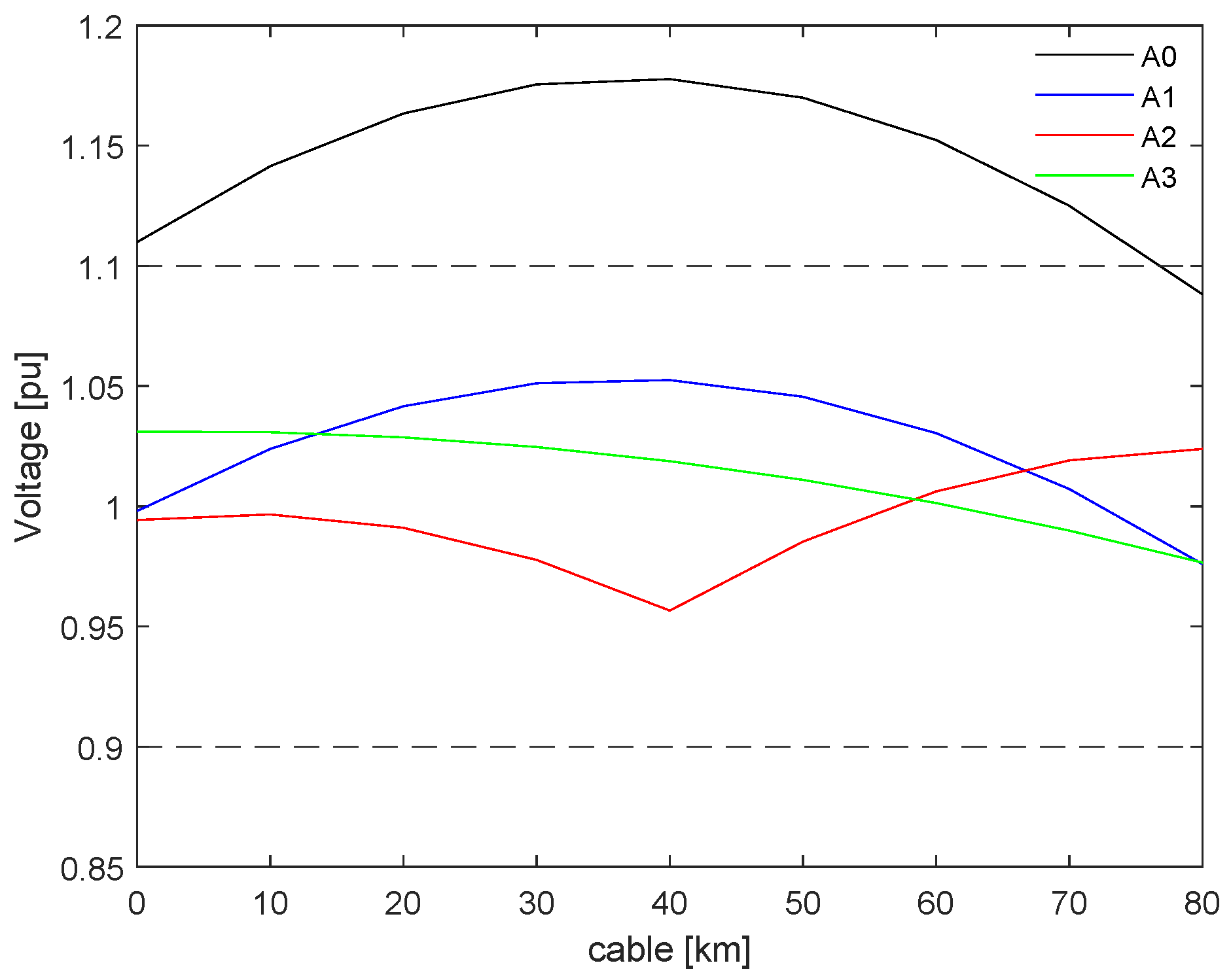
Shunt reactors were installed to comply with the standard requirements set by most TSO. The main objective was to maintain the voltage within acceptable limits, specifically between 0.9 pu and 1.1 pu, and to ensure that the power factor remained within the range of −0.95 to 0.95, lagging at the point of common coupling (PCC). The voltage profile results for an 80 km export cable, considering the various compensation arrangements, are shown in
Figure 3. In this Figure, “A0” represents a scenario without shunt compensation. Voltage measurements were taken at the sending and receiving ends of the cable, as well as at 10 km intervals along its length. The results indicate that, without appropriate reactive power compensation, the voltage exceeds the specified TSO limits. By contrast, the three compensated arrangements, A1, A2, and A3, successfully maintained the voltage within the required limits.
The analysis of shunt reactor placement and sizing revealed that both the location and degree of compensation (as distributed among the reactors) influenced the voltage profile. The corresponding power factor results are presented in
Table 2, demonstrating that the implemented shunt compensations maintained both the voltage and power factors within the specified ranges. This analysis was conducted under a SCR of 3, which indicates a weak grid, though not excessively so.
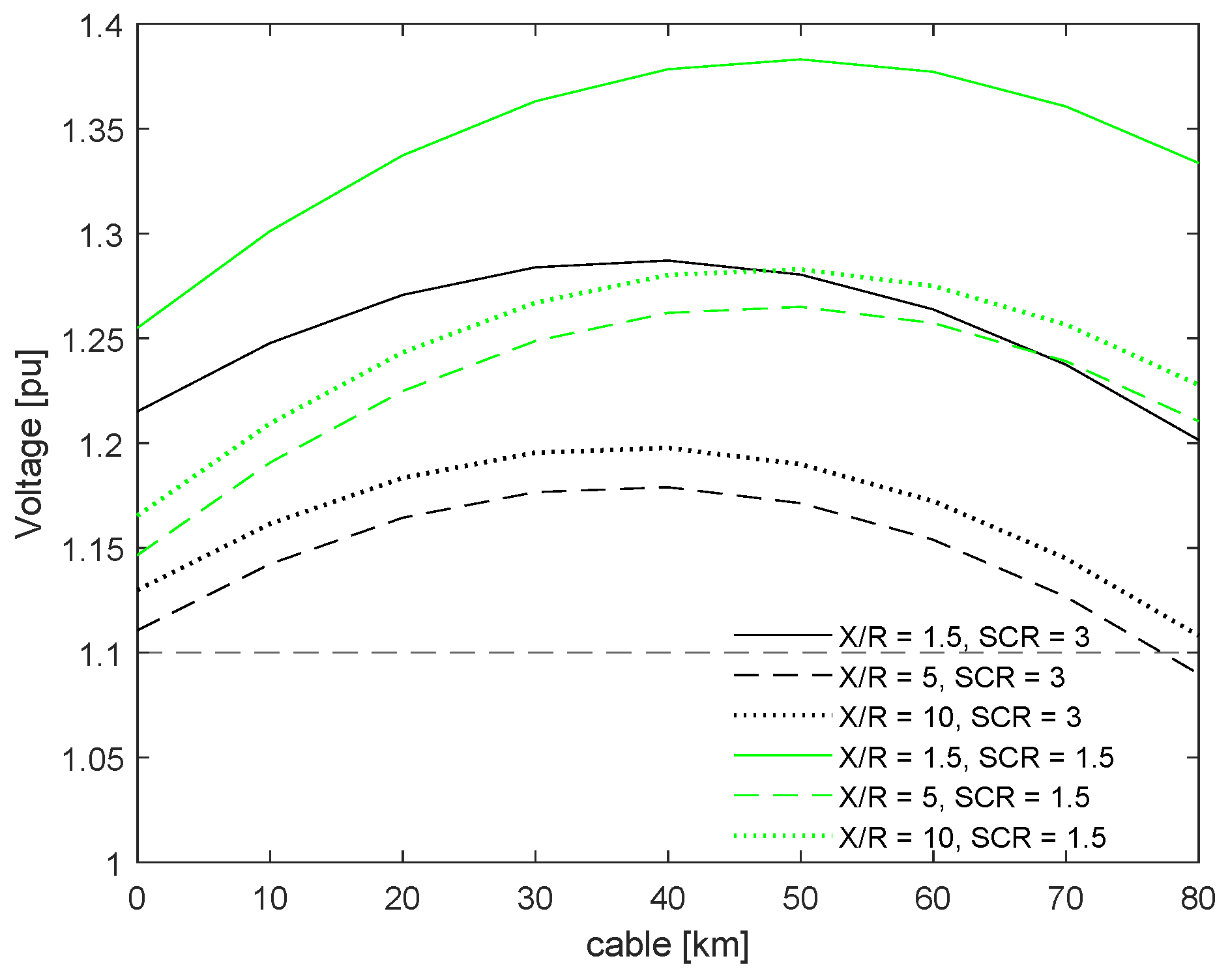
The power factor and voltage profile were also heavily influenced by the strength of the electrical grid, as illustrated in
Figure 4. This figure shows an 80 km cable with no shunt compensation under two SCR conditions (1.5 and 3) and for X/R ratios of 1.5, 5, and 10. The results demonstrate that the ability to transfer power and maintain voltage within specified limits is directly related to both SCR and X/R ratios. Consequently, the control and tuning of shunt reactors must be adjusted based on the grid strength. This interdependence means that the overall stability of the power system is closely tied to the strength of the grid: the weaker the grid (indicated by lower SCR and lower X/R ratios), the more shunt compensation is required, which, as will be further discussed in
Section 5, will impact system stability.
Changing both X/R and SCR will change the impedance of the overall system, which aligned with the shunt compensations, and the cable length will cause the impedance to vary significantly depending on the arrangement, X/R, SCR, and cable length. This impedance will influence the power factor and voltage profile; hence, shunt reactor compensation will need to be computed accordingly to maintain the PF above 0.95 and a voltage between 0.9 and 1.1 pu.
4. GFM and GFL Controllers Comparison for an HVAC-Connected OWPP
This section focuses on stability analysis, primarily comparing two converter control strategies: GFM and GFL. Additionally, the analysis examines three distinct system configurations, that vary based on the placement of shunt reactor compensations along an HVAC submarine cable. The study also considered three different cable lengths—80 km, 120 km, and 150 km—to evaluate the performance of the converter controllers across various scenarios. The objective is to determine which converter control strategy and system arrangement optimize stability, potentially allowing for longer HVAC cables. Furthermore, the analysis aimed to identify the optimal placement of shunt reactors for enhanced stability.
Given the variability in wind speed and the availability of energy from the OWPP, it was essential to analyze the stability of the different case studies at various operating points. The stability analysis was conducted over a range of power operating conditions. Specifically, the active power was varied from 0 pu to 1 pu in steps of 0.20 pu at nominal voltage.
Small-signal stability was evaluated using disk margins (DM), which quantify the stability and robustness of a closed-loop system by introducing a multiplicative factor
f to the open-loop system
L, such that
. While this section provides a brief overview of disk margins, they have been widely employed in numerous studies [
28,
35,
36,
37,
38].
Two primary approaches exist for DM analysis: the “loop-at-a-time” method and the multi-loop DM analysis. The loop-at-a-time method introduces the perturbation factor
f in a single channel (either input or output) while keeping the other channels fixed. Although this method is useful for analyzing individual channel dynamics, it can be overly optimistic, as it does not account for the simultaneous effects of perturbations across multiple channels. To address these limitations, this study applied the more comprehensive multi-loop DM analysis. This approach applies distinct perturbations across multiple channels, represented by a matrix of perturbations
F, defined as:
Each element
represents the multiplicative factor applied to the open-loop system
L in the channel
. The perturbation factor
is given by:
where
is the normalized uncertainty, an arbitrary complex value constrained within the unit disk (
).
The parameter determines the extent of gain and phase variation modeled by F. For a fixed , controls the size of the disk of uncertainty. When , the perturbation factor , meaning the perturbed system is identical to the nominal open-loop system (). In this case, the Nyquist plot of intersects the critical point , and the system operates at the boundary of stability, with no tolerance for uncertainty. This condition is referred to as marginal stability.
Conversely, larger values of increase the size of the uncertainty disk, allowing for greater gain and phase variations while maintaining stability. This corresponds to a larger disk margin and enhanced robustness. Thus, for , the Nyquist plot of the perturbed system remains clear of the point, ensuring stability, while for , the Nyquist plot intersects , resulting in marginal stability, where the system cannot accommodate any perturbations.
In this analysis, the multi-loop input/output disk margin is quantified by a single parameter,
, representing the largest disk of perturbations for which the closed-loop system remains stable [
30]. Applying factors across all channels simultaneously provides a worst-case scenario for achieving system stability. Therefore, the parameter
was used to assess the stability and robustness of the studied systems. An
value of 0 indicates no tolerance for uncertainty, while values further from 0 indicate greater system stability.
The analysis process involved several steps. First, both GFM and GFL controllers, along with the hardware configurations, were linearized (
Section 4.1). These linear, time-invariant models were validated against the EMT models (
Section 4.2). The initial conditions were extracted from the EMT model to populate the state-space matrices for all the cable lengths and configurations. Finally, a stability analysis was conducted for all specified active power and voltage operating points, and the results are presented in terms of disk margins in
Section 4.3.
4.1. Model Linearization
The nonlinear EMT models were linearized to approximate the system behavior at various active power operating points. This linearization was applied to all the system configurations, including both converter control strategies.
Appendix D presents the state-space matrices,
and
, as well as the states
and inputs
used in the model. The same linearization procedure was applied to the other system arrangements.
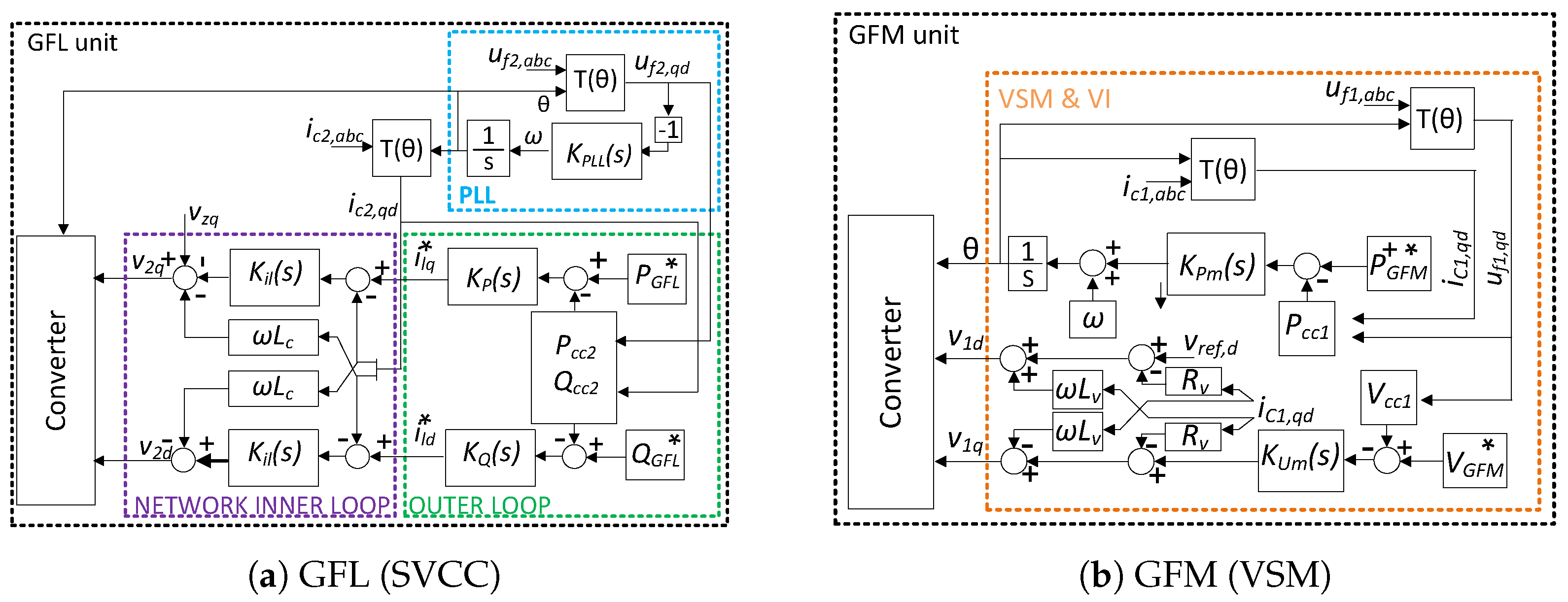
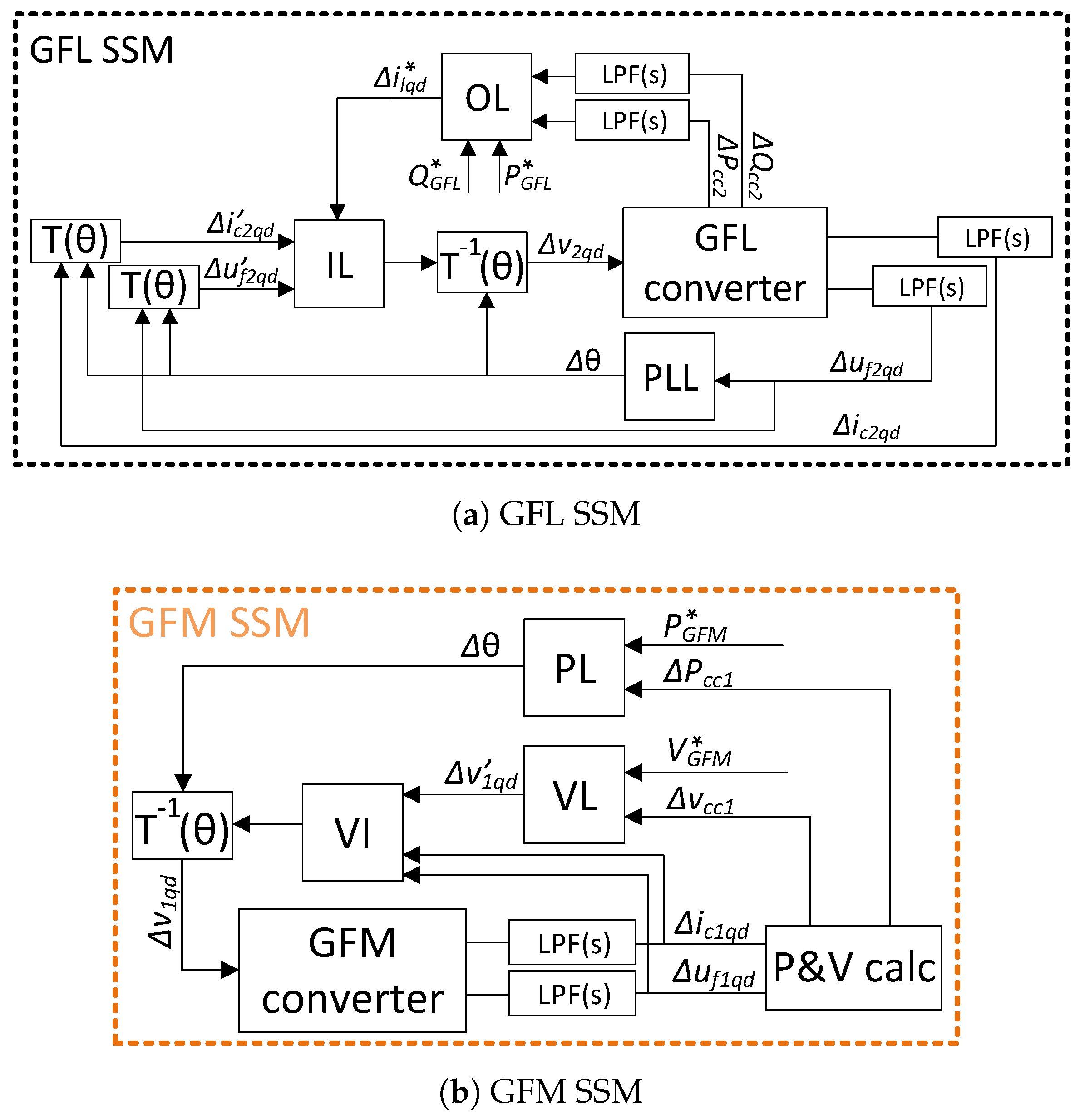
The controllers depicted in
Figure 5 were linearized. The linearization process of these units is shown in
Figure 6. Each component of both controllers (GFL in
Figure 6a and GFM in
Figure 6b) was first linearized independently, and then interconnected based on their respective inputs and outputs.
4.2. Small-Signal Model Validation
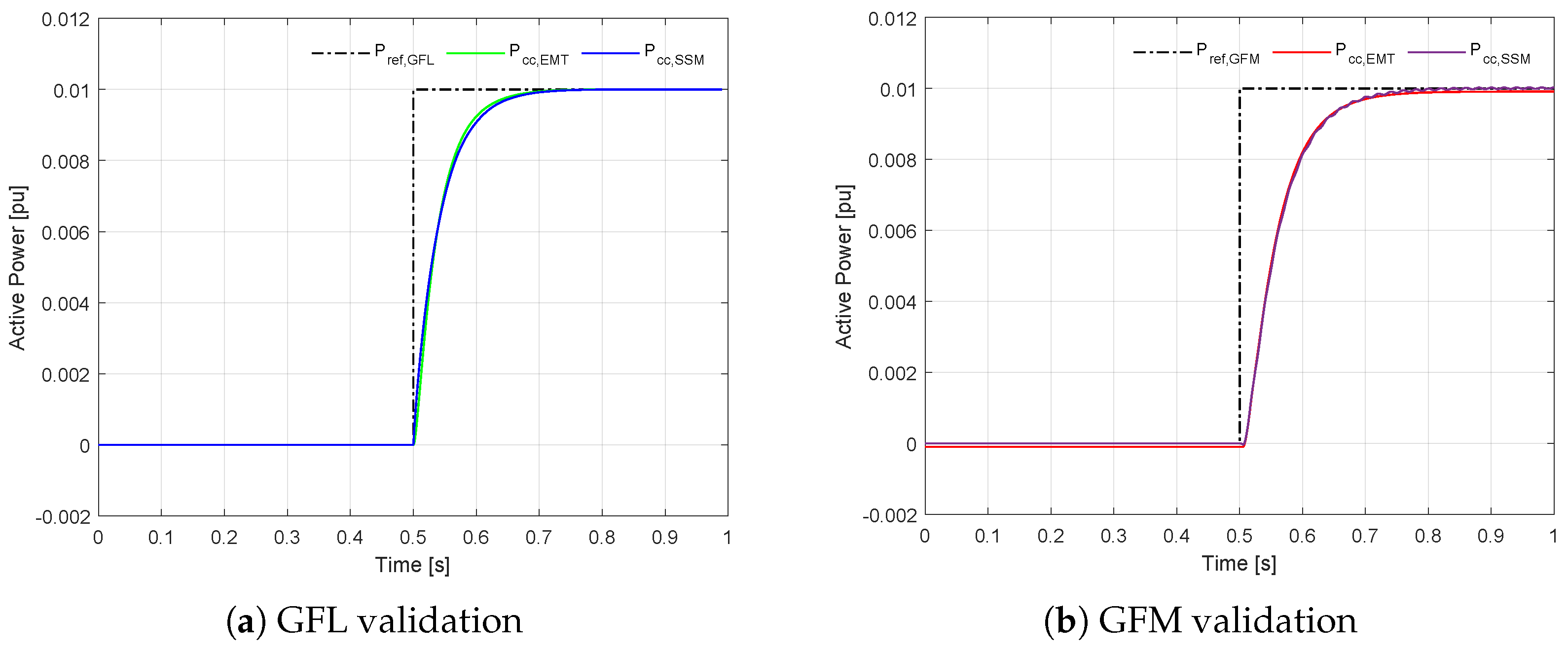
After developing the small-signal model (SSM), the initial step involved validating its accuracy by comparing it with the developed EMT model. For this validation, a single power step of 0.01 pu was applied to both EMT and SSM simulations.
Figure 7 displays the results for both the GFL (
Figure 7a) and GFM (
Figure 7b) converter controllers for a cable length of 80 km and configuration A2. The same process was followed for the other two arrangements. The close alignment between the SSM and EMT responses in these figures confirms that the SSM accurately replicates the EMT behavior, demonstrating its reliability for further analysis.
4.3. Stability Assessment
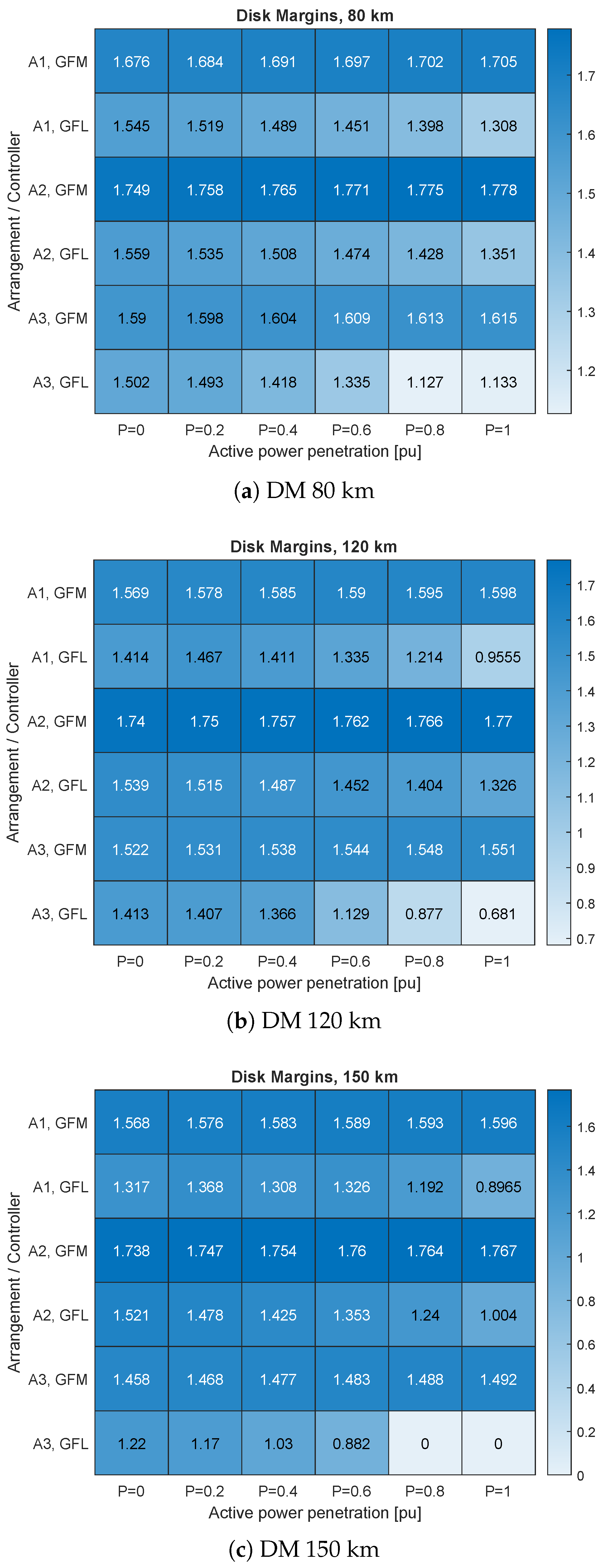
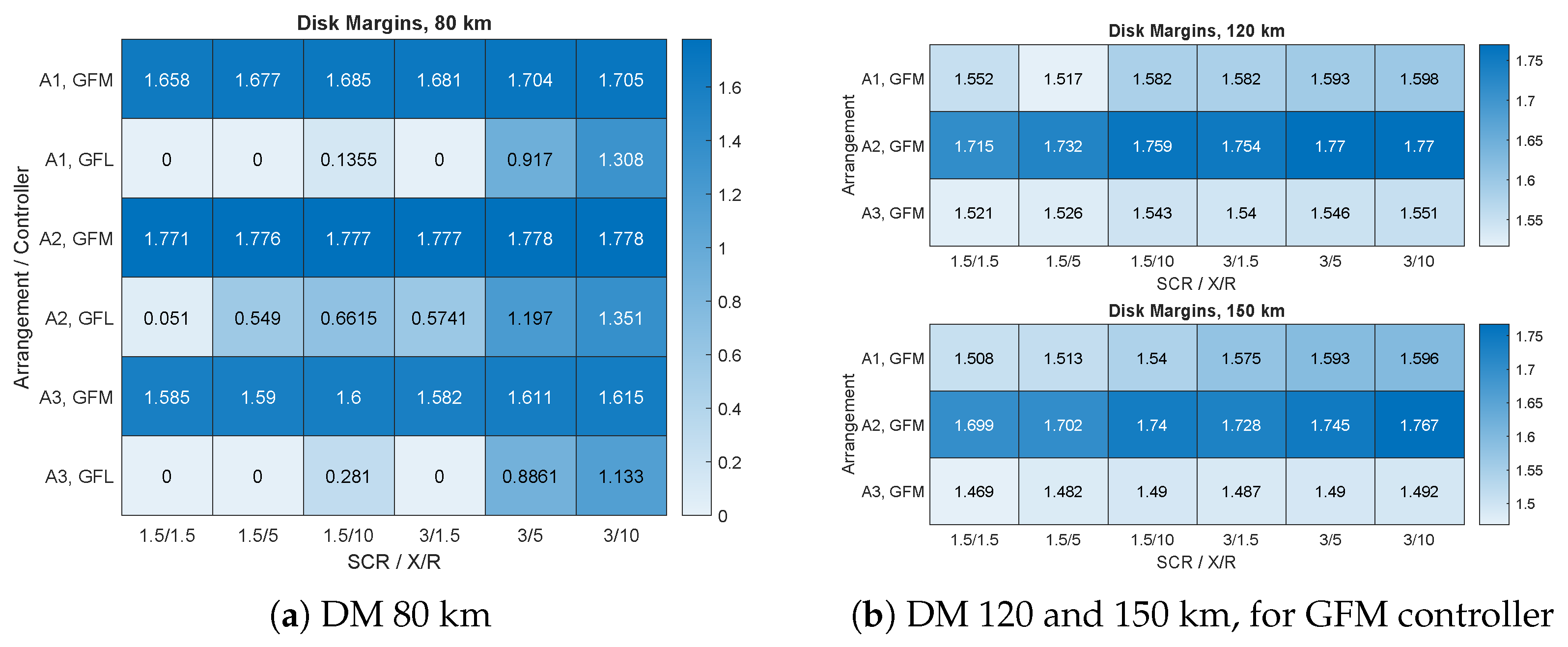
The disk margin analysis was conducted to assess the stability of the two converter control strategies, grid following and grid forming, across three distinct cable lengths: 80 km, 120 km, and 150 km, considering the three specific configurations labeled A1, A2, and A3. The results of the disk margins are shown in
Figure 8 for 80 km (
Figure 8a), 120 km (
Figure 8b), and 150 km (
Figure 8c).
Among these configurations, the grid-forming converter controller exhibited the largest disk margins, particularly in the A2 arrangement, followed by the A1 arrangement. This suggests that the GFM control strategy is more robust in maintaining stability than the GFL approach. This also suggests that distributing the shunt reactors along the export cable (A1 and A2), rather than having only one shunt compensation onshore (A3) further enhances stability.
The disk margins for the grid-forming controller remained consistent across all operating points, indicating reliable performance independent of active power variations. In contrast, the disk margins for the GFL controller demonstrated significant variability as the active power level increased from 0 to 1, with the lowest margins observed at higher active power penetration. Additionally, it was observed that an increase in cable length resulted in a decrease in disk margins, highlighting the influence of transmission distance, and hence, increased line impedance, on system stability. This reduction in disk margins corresponds to the Nyquist plot of the open-loop system moving closer to the critical −1 point as cable length and impedance increase, ultimately leading to conditions of marginal stability when the disk margin reaches zero. At this point, the system is unable to tolerate any uncertainty, and any additional perturbation could cause instability.
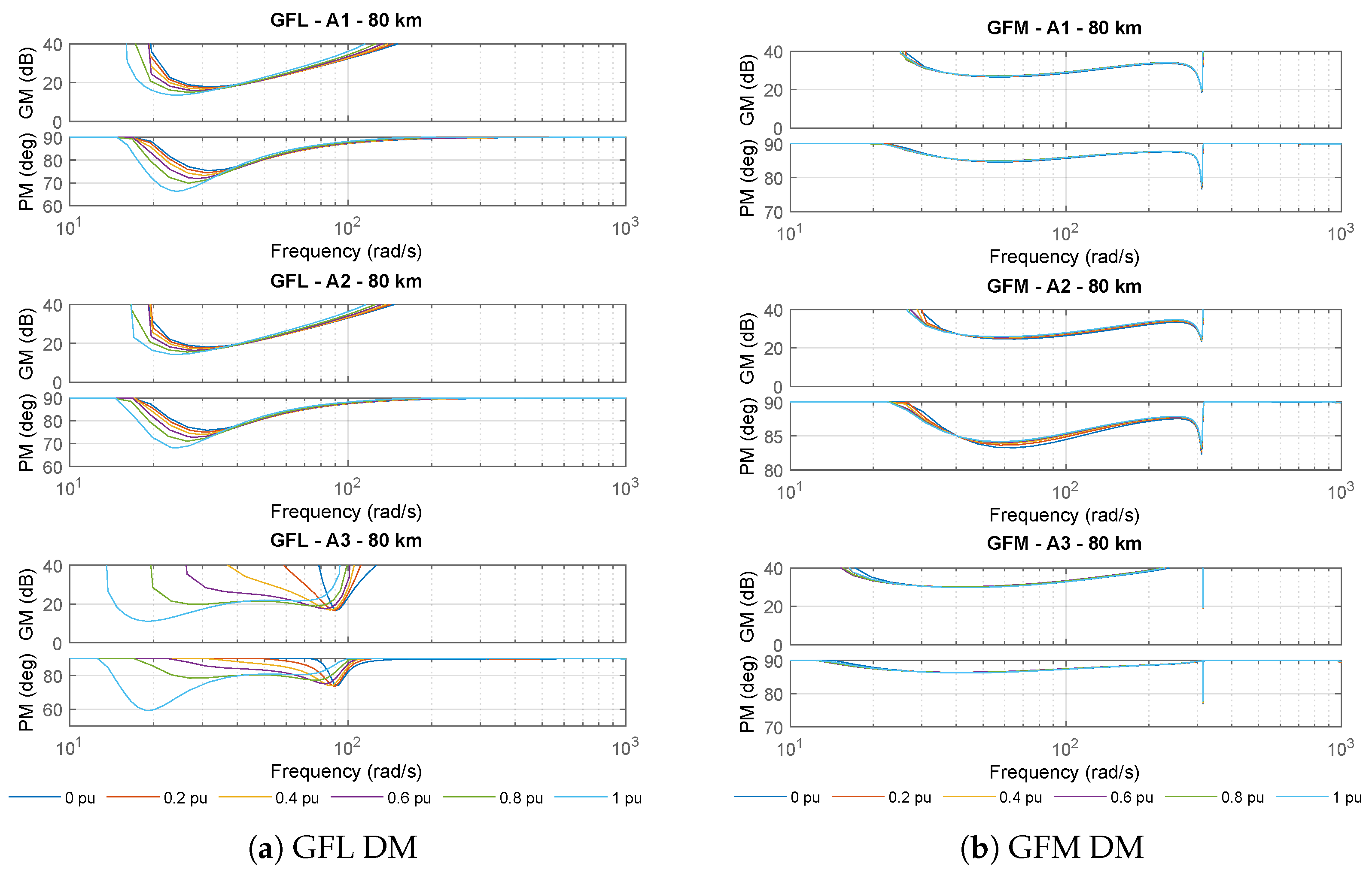
Figure 9 shows the gain and phase margins across a frequency spectrum where these margins are observed to be at their lowest. This analysis includes both GFL (
Figure 9a) and GFM (
Figure 9b) scenarios. The plots highlight the variation in the disk margins for the three different arrangements, specifically for a cable length of 80 km. Although only the 80 km case is depicted, similar trends are observed for cable lengths of 120 km and 150 km.
The plots reveal that, in the GFL scenario, the active power operating points significantly influence both the gain and phase margins. For configurations A1 and A2 within the GFL scenario, the lowest gain and phase margins, and consequently, the lowest disk margins are found at very low frequencies, specifically around 20 to 30 rad/s. These low-frequency disk margins are characterized by interactions between the GFL converter controller and the power system, especially due to the use of a PLL for grid synchronization and the inner current controller. In contrast, for configuration A3, there was a notable dip in both the gain and phase margins at frequencies below 20 rad/s, with an additional significant low point of approximately 90 rad/s.
In the GFM controller scenario, the gain and phase margins remained consistent across different operating points, corroborating previous observations. This consistency results in similar margin values across the entire frequency range. However, the lowest gain and phase margins for all three configurations occur at the natural frequency of the power system, likely due to interactions between the controller and the electrical grid. The 50 Hz peak can be further reduced by adjusting the values of the virtual impedance, specifically and . However, this approach may result in reduced margins at lower frequencies. Therefore, future work should focus on optimizing the tuning of the virtual impedance to achieve greater mitigation of the gain and phase dips while preserving acceptable margins across the frequency spectrum.
The plots also highlight the influence of system arrangements on the gain and phase margins. The manner in which the controller interacts with the power system varies depending on the configuration, which plays a critical role in determining the overall stability of the system.
From this section, it can be concluded that the GFM controller demonstrates superior stability. It remains stable and robust across all cable lengths and configurations. In addition, the stability of the overall system is not critically affected by active power injection, which is important given that the power injected by the OWPP varies considerably with wind conditions and resource availability.
By contrast, the stability of the GFL-connected converter is influenced by the injected active power, with lower stability margins observed at higher power levels. Its stability is also affected by the transmission line impedance, leading to reduced stability and significantly lower margins with increased cable length.
Regarding the system configurations, arrangement A2 proved to be the most effective, followed by A1. This suggests that distributed shunt reactors across the transmission system enhance the stability, allowing for the use of longer cables.
It is important to note that this study was conducted using a weak grid with an SCR of 3. Further research should explore stronger networks, as the system might benefit from GFL controllers in scenarios with a stronger grid, where a robust voltage reference signal could enhance the GFL controller performance. However, since this study focuses on weaker grids, the next section will examine even weaker grids by varying the SCR and X/R ratio.
5. GFM and GFL Controllers Comparison for an HVAC-Connected OWPP in Weaker Networks
The integration of RESs into electrical power systems leads to significant changes in the grid dynamics. One of the challenges associated with this transition is the reduction in system strength, which is often quantified using SCR and X/R. These quantities reflect the ability of the grid to absorb disturbances and power delivery performance.
Section 4 focuses on the stability of the two controllers, different arrangements and the three cable lengths in a grid with an SCR of 3 and an X/R of 10 (
). Although this SCR value is already indicative of a relatively weak grid [
39,
40], further analysis is necessary to understand the performance and robustness of these controllers under even more challenging conditions. HVAC transmission introduces additional impedance as well as shunt reactors, and it was observed from the previous section that the different arrangements would benefit from different margins of stability. This effect becomes more noticeable in systems with lower SCR and X/R values. An analysis similar to that in
Section 4 was conducted. However, instead of varying the active power injection, the SCR (1.5 and 3), defined between the transmission system and the electrical grid, and X/R ratio (1.5, 5, and 10) were varied at the active power operating point of 1 pu. This specific operating point was chosen because it previously showed lower stability margins in the GFL case, making it a critical point of interest.
Figure 10a shows the disk margins for different configurations, A1, A2, and A3, under both controllers, with an HVAC transmission length of 80 km. The results confirm the findings from
Section 4—GFM control, which improves the stability and robustness in weaker grids. The lower X/R and SCR values did not significantly affect the disk margins of this controller. This can also be observed in
Figure 11b, which shows that the disk margins maintain a consistent gain and phase across all X/R and SCR values. The pole-zero map in this figure further illustrates these effects, where it can be seen that the system remains stable, with no poles on the right-half plane. The pole-zero map was used here, as it was necessary to display the instabilities of the GFL scenario, where even for an 80 km transmission with arrangement A2, which performs best, the system becomes unstable. As seen in
Figure 11a, the system is already unstable at X/R = 1.5 and SCR = 1.5, and nearly unstable at SCR = 3 and X/R = 1.5, with a pole close to the origin. The pole-zero maps clearly demonstrate how X/R and SCR impact stability, with poles shifting to the right as SCR and X/R decrease. The findings in
Figure 10b show that nearly all disk margins are unstable for the GFL controller under these conditions, particularly for 80 km of transmission. Therefore, GFM converter units are essential for longer HVAC transmissions, especially in weaker grids with higher impedances.
The GFM-connected controller showed consistent performance across different X/R and SCR values, even with longer cables of 120 and 150 km, as shown in
Figure 10b. The results also indicate that arrangement A2 is the most effective, supporting the conclusion from the previous section that distributing shunt reactors along the line significantly improves the stability.
In conclusion, GFM is necessary for longer export cables, particularly in weaker grids with lower X/R and SCR values. Configuration A2 is recommended for enhanced stability, although configuration A1 has also been proven to be robust across all GFM operating points.
6. Discussion
The results presented in
Section 4 and
Section 5 illustrate the comparative performance of GFL and GFM controllers for OWPPs connected via HVAC export cables.
Table 3 summarizes the advantages and disadvantages of both strategies, providing an overview of their characteristics based on the findings.
GFM controllers demonstrate superior stability and robustness across all system configurations and cable lengths. This is evident in
Figure 8, which shows that the GFM control strategy consistently achieves higher
values for all three cable lengths, maintaining stability across all active power operating points analyzed. In contrast, the GFL controller exhibits a significant loss of stability as cable lengths increase. For the 150 km cable, some operating points already display a disk margin of zero, indicating no tolerance for uncertainty. In such cases, the factor
f equals 1, meaning even a small uncertainty or disturbance would result in instability.
The disk margin analysis also highlights the consistent performance of GFM under weak grid conditions with low SCR and varying X/R ratios. This robustness can be attributed to the independence of GFM control from grid synchronization, allowing it to maintain stability even under significant active power variations. Conversely, GFL controllers show pronounced stability limitations, particularly as active power injection increases. These limitations are exacerbated by weaker grid conditions and increased cable lengths.
Figure 10 further emphasizes the superiority of GFM, particularly for weaker systems. Even with a shorter 80 km cable, the GFL controller demonstrates zero
values across all configurations and active power penetration levels, underscoring its inability to maintain stability in such conditions.
While GFL remains simpler to implement and is widely adopted in current systems, its performance is heavily reliant on grid strength and a robust voltage reference. These limitations are reflected in the reduced disk margins observed at higher power levels and weaker grid conditions. In contrast, GFM provides a reliable solution for OWPP applications requiring extended HVAC export cables, effectively mitigating stability challenges associated with line impedance and reactive power imbalance.
Despite its superior performance, the adoption of GFM controllers remains limited due to the need for further research and development. Future work should focus on addressing these challenges to accelerate the integration of GFM controllers in offshore wind applications, thereby enhancing grid stability and enabling reliable operation under increasingly demanding conditions.
7. Conclusions
As fossil fuels are phased out in favor of renewable energy sources, the dynamics of power systems are undergoing significant change. The OWPP, a key component of this shift, are being commissioned at increasing distances from shore. Owing to the maturity and reliability of HVAC cables, they are the preferred choice for these connections. However, as these cables extend further offshore, reactive power compensation is necessary to ensure the system stability.
Currently, most connected offshore wind farms operate in grid-following mode. This study compares the performance of three cable lengths—80 km, 120 km, and 150 km—for an OWPP connected to a local network, with an HVAC cable utilizing shunt reactors to compensate for capacitive reactive power. Three specific configurations were analyzed: A1, with shunt reactors located at both the offshore substation and onshore; A2, similar to A1 but with an additional mid-cable reactor; and A3, with a shunt reactor only onshore.
The study also compared cable lengths and configurations under two different control strategies: GFL and GFM. The primary goal was to identify the optimal system arrangement and control strategy to enhance the stability and robustness, as assessed through a small-signal model.
The findings indicate that across all cable lengths, the most robust configuration is configurations A2 when paired with GFM control, followed by arrangement A1 with the same control strategy. The GFM control significantly enhanced the system stability compared to the GFL converter controller. It maintained consistent stability across a range of power operating points, from 0 to 1 pu penetration, for all cable lengths. In contrast, the stability of the GFL unit is highly dependent on the level of active power injected into the grid.
In addition, an analysis was conducted for weaker grids with lower SCR and X/R values. The results confirmed that GFM-connected controllers are the preferred option, as they maintain consistent disk margins across all SCR and X/R values. In contrast, the GFL controller was unable to maintain stability in weaker networks, even at a shorter transmission distance of 80 km.
The results suggest that GFM control holds potential for OWPPs located further from the shore. The inclusion of reactors at offshore substation, and mid-cable for enhanced stability, is recommended. Additionally, the GFM unit demonstrated independence from grid stiffness, performing well in weaker grids with lower SCR and lower X/R. On the other hand, GFL units struggled to maintain stability under these conditions, often becoming unstable, as indicated by a disk margin of zero. These findings reinforce the recommendation to employ GFM control in OWPP applications.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}