

Improving Dynamic Security in Islanded Power Systems: Quantification of Minimum Synchronous Inertia Considering Fault-Induced Frequency Deviations




Abstract
1. Introduction
2. Case Study—Description and Modelling
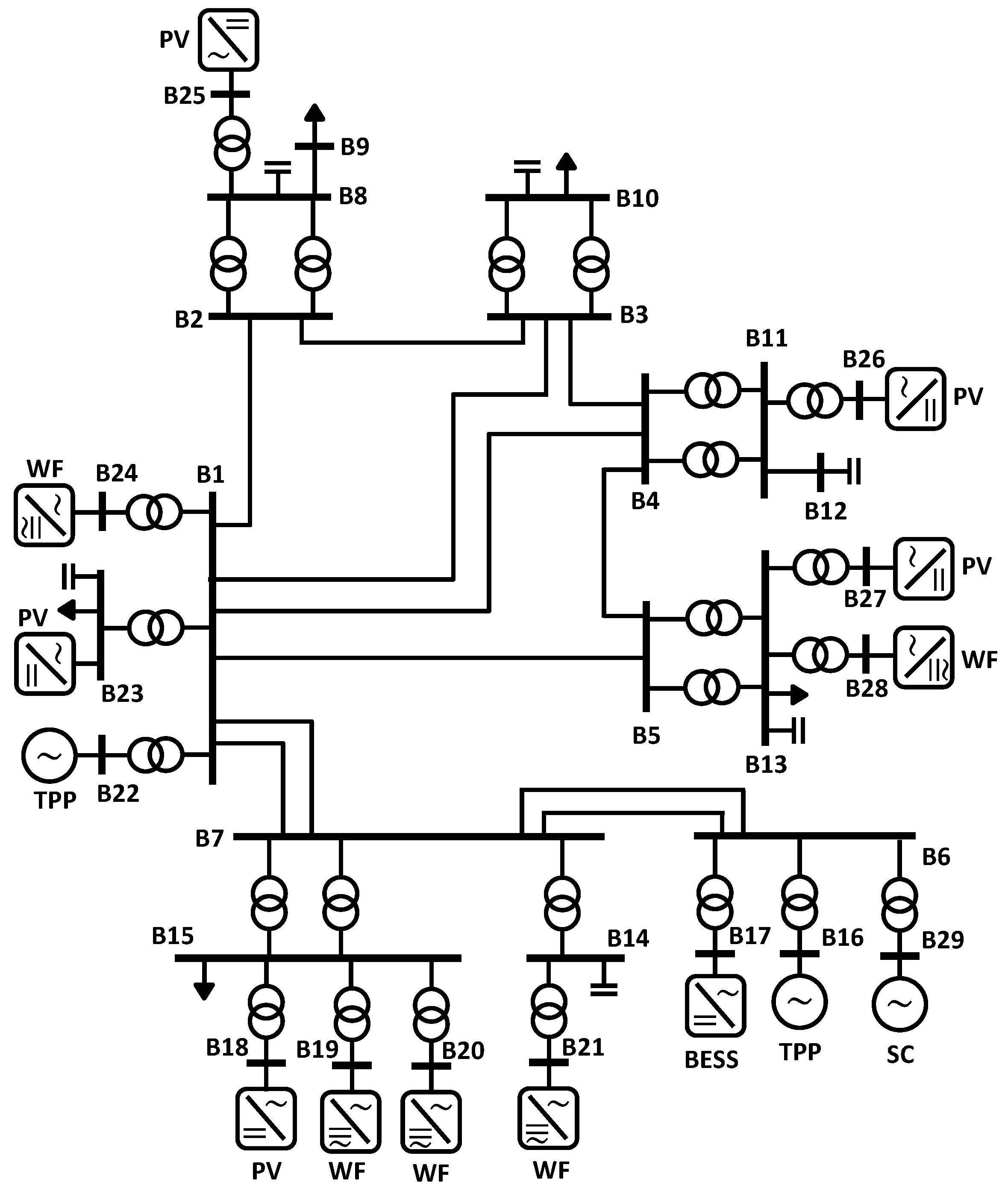
2.1. Power System Description
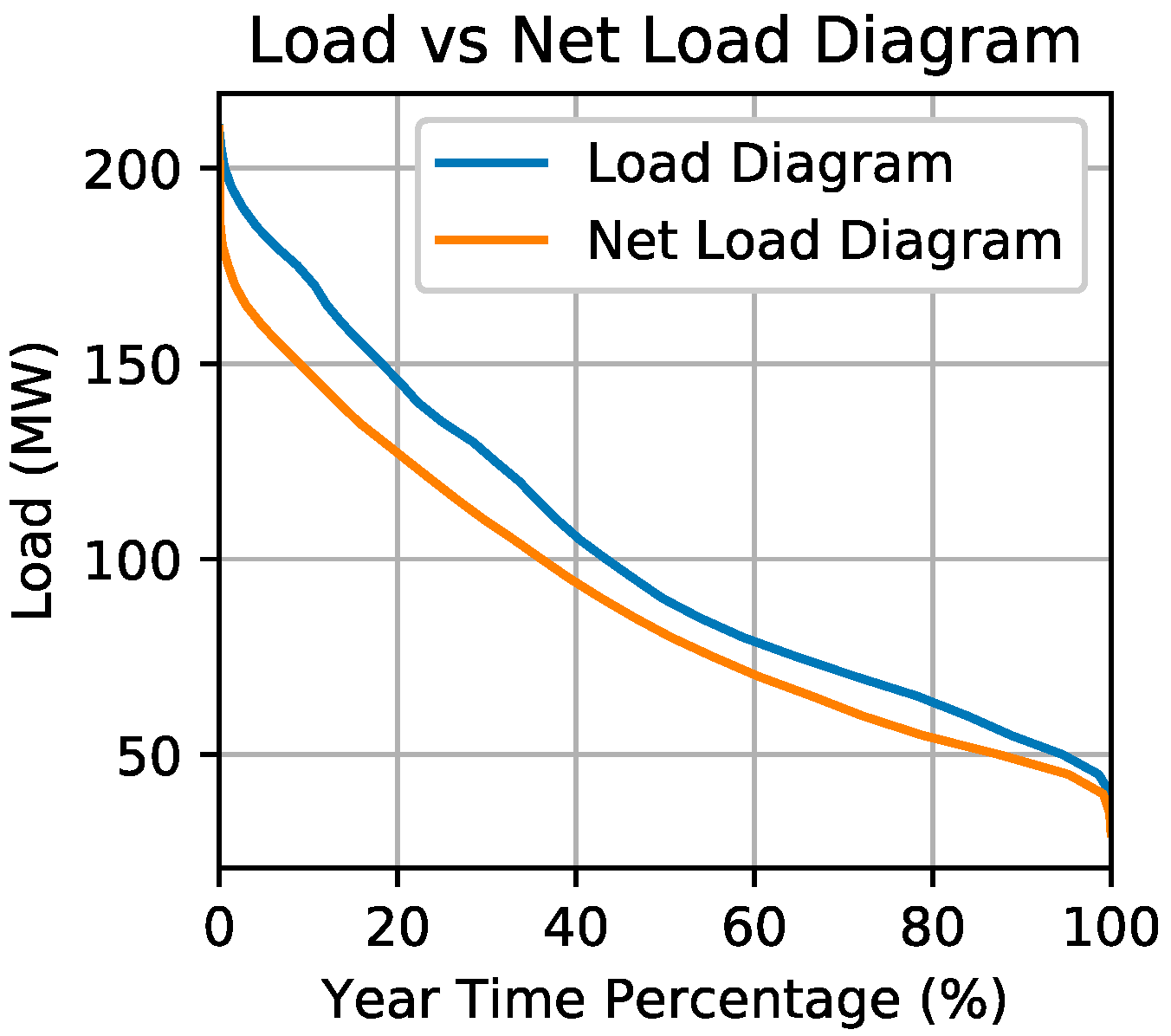
2.2. Current Operation and Prospective System Development
2.2.1. Integration of Additional Renewable Generation
2.2.2. Integration of a Battery Energy Storage System
2.3. Power System Modelling
3. Need for Synchronous Inertia
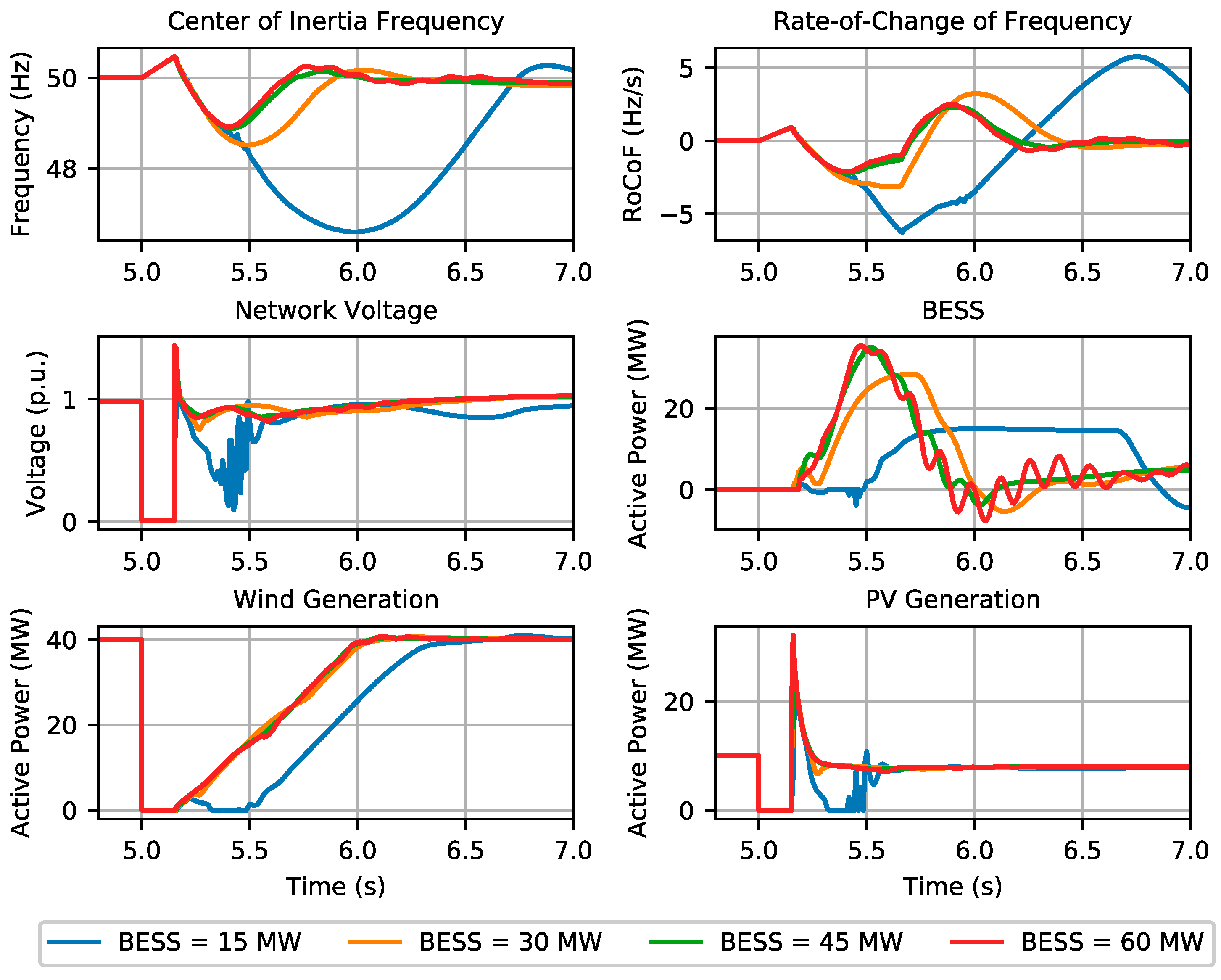
- Operating scenario 1: the network operates with one SM, with a load consumption of 60 MW, a wind generation of 40 MW and a PV generation of 10 MW;
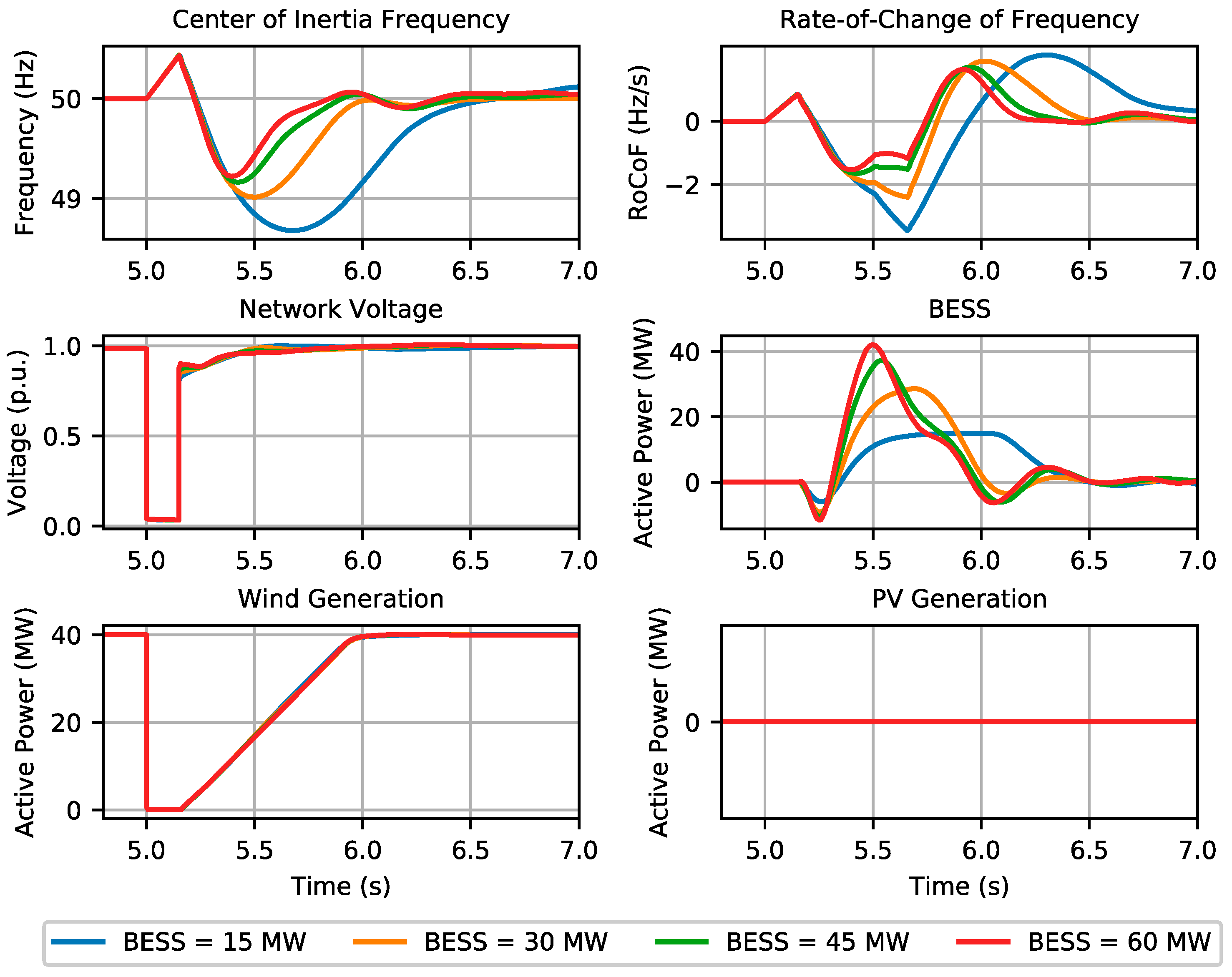
- Operating scenario 2: the network is operated with two SMs, with a load consumption of 60 MW, a wind generation of 40 MW and a PV generation of 0 MW.
3.1. BESS Power Capacity—Sensitivity Analysis
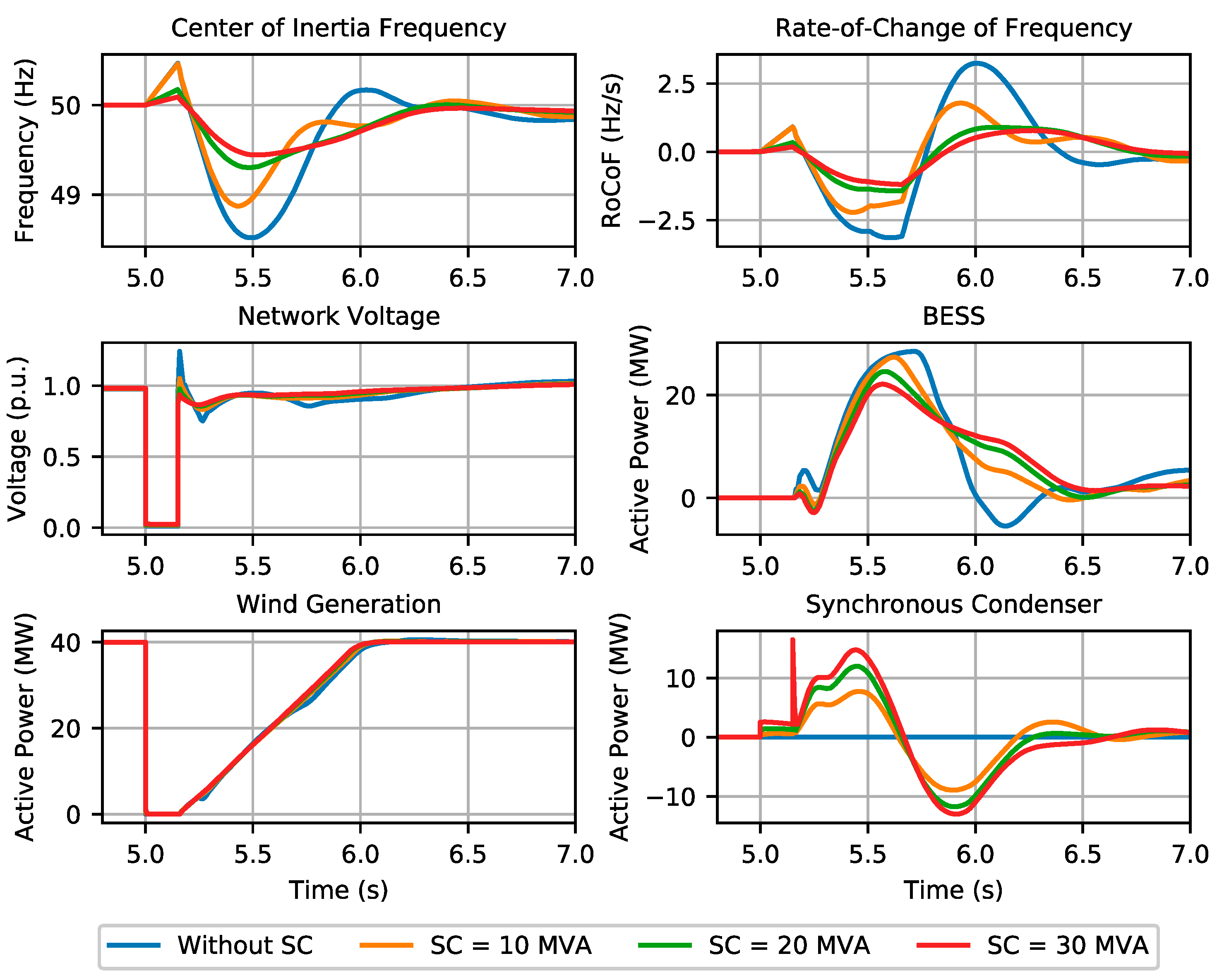
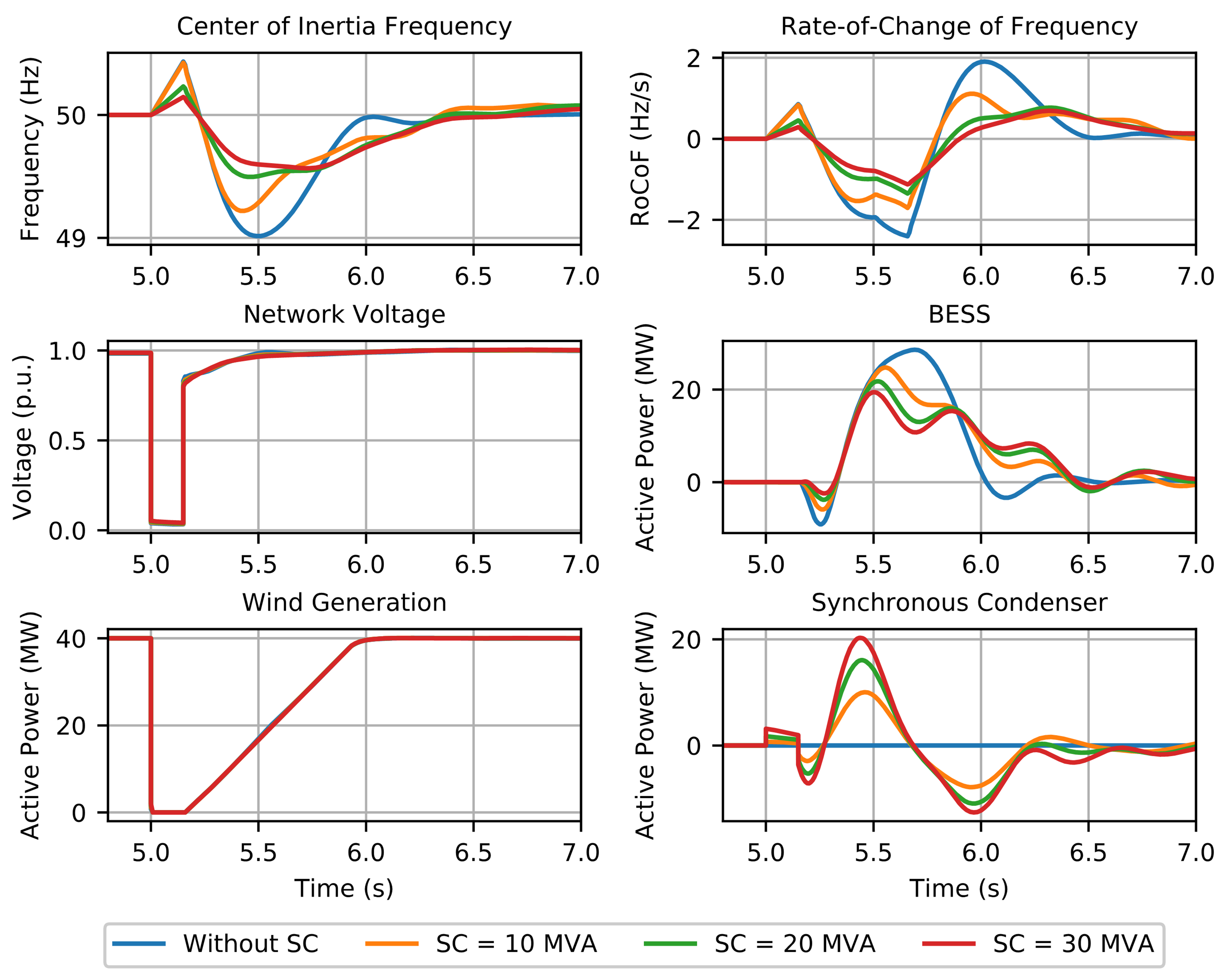
3.2. Integration of Synchronous Condensers—Sensitivity Analysis
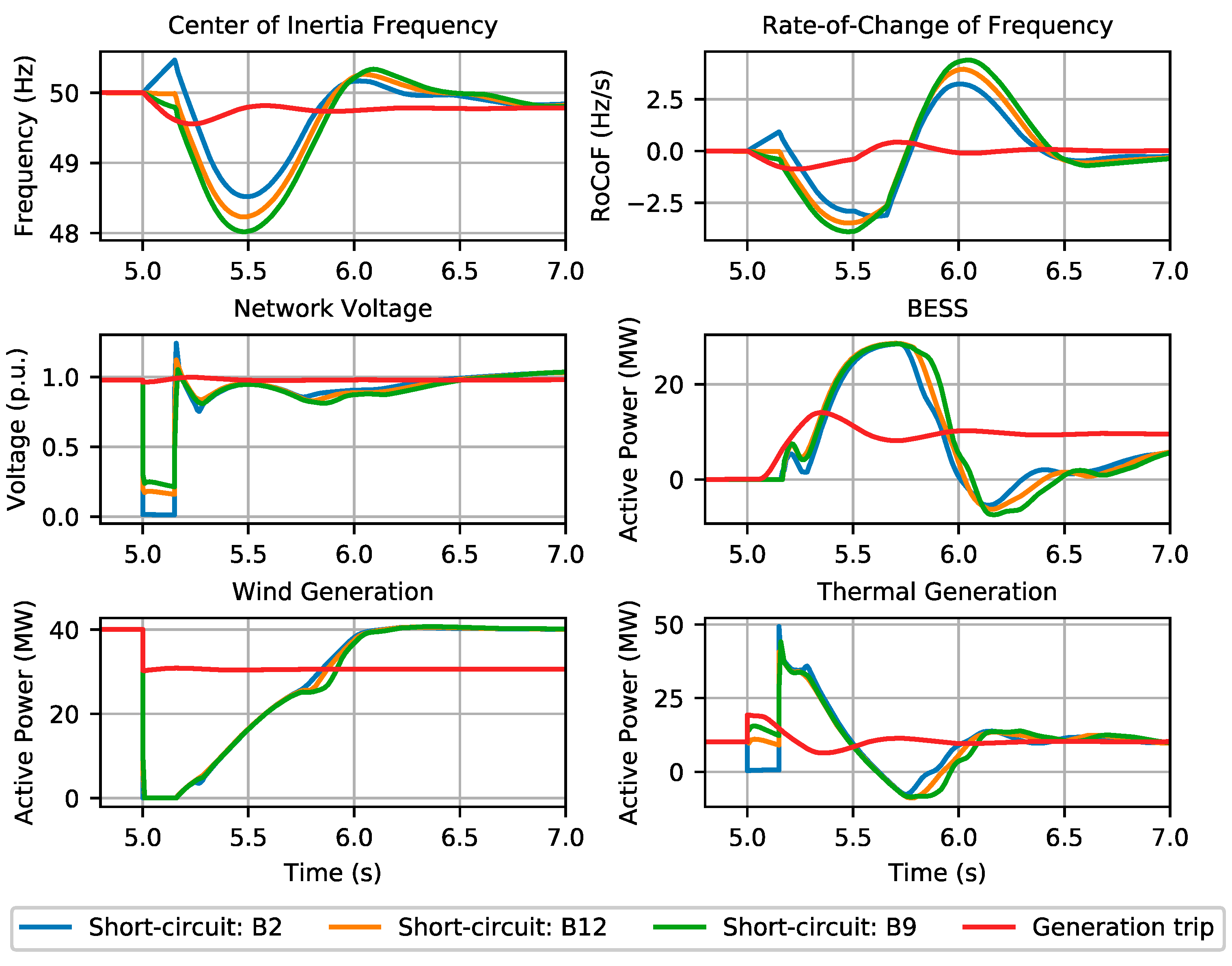
3.3. Network Contingencies—Sensitivity Analysis
4. Minimum Synchronous Inertia Quantification
4.1. Functional Knowledge Dataset
4.1.1. Dataset Generation
- The active power output limits of the SM must be respected;
- At least one SM must be in operation;
- The system should have enough power reserve to cover the loss of the generator injecting the largest amount of power.
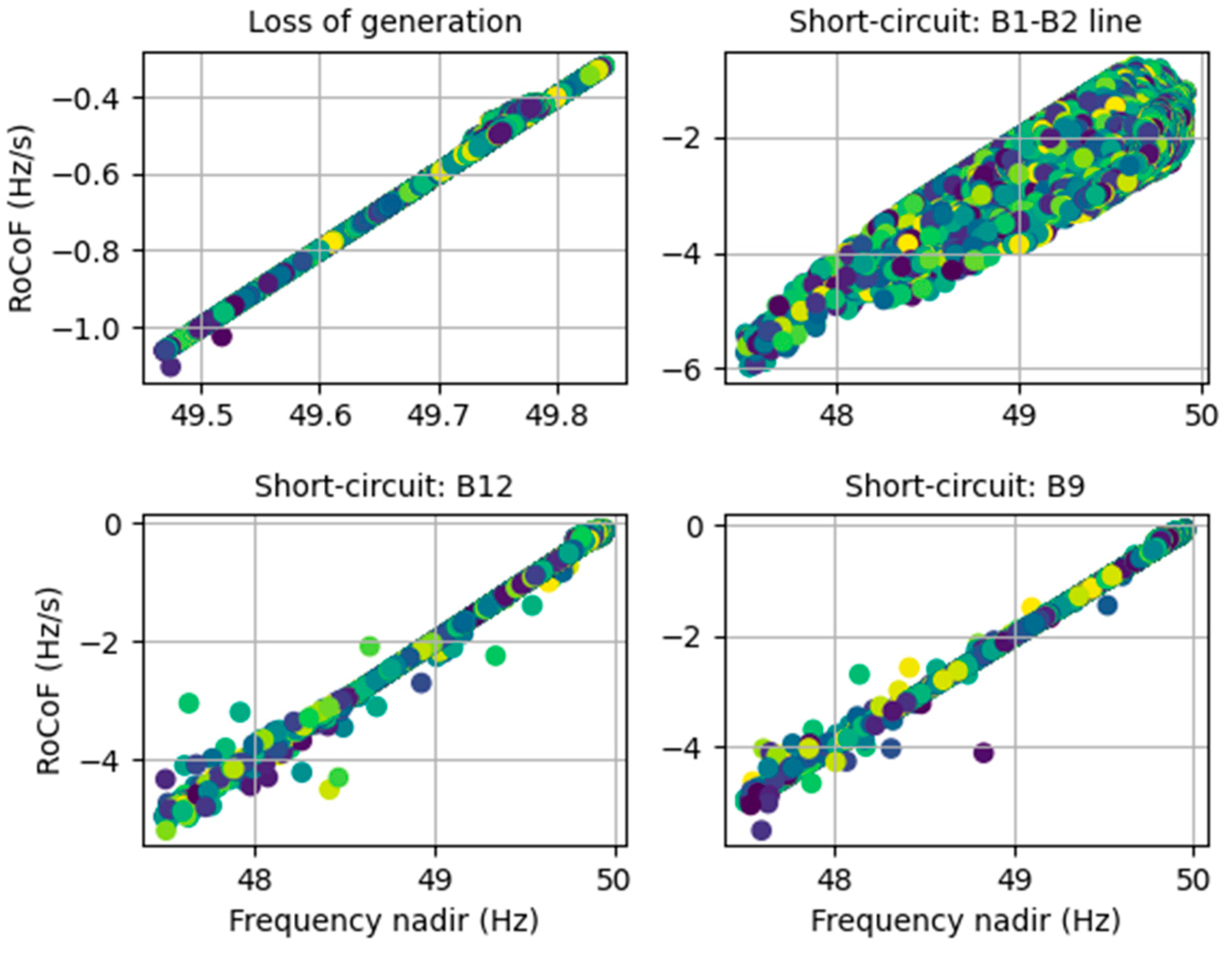
4.1.2. Offline Dynamic Simulation
- The sudden trip of the generator injecting the largest amount of active power;
- 150 ms short-circuit occurring in the line connecting B1 and B2 (leading to the tripping of the line);
- 150 ms short-circuit occurring in B12;
- 150 ms short-circuit occurring in B9.
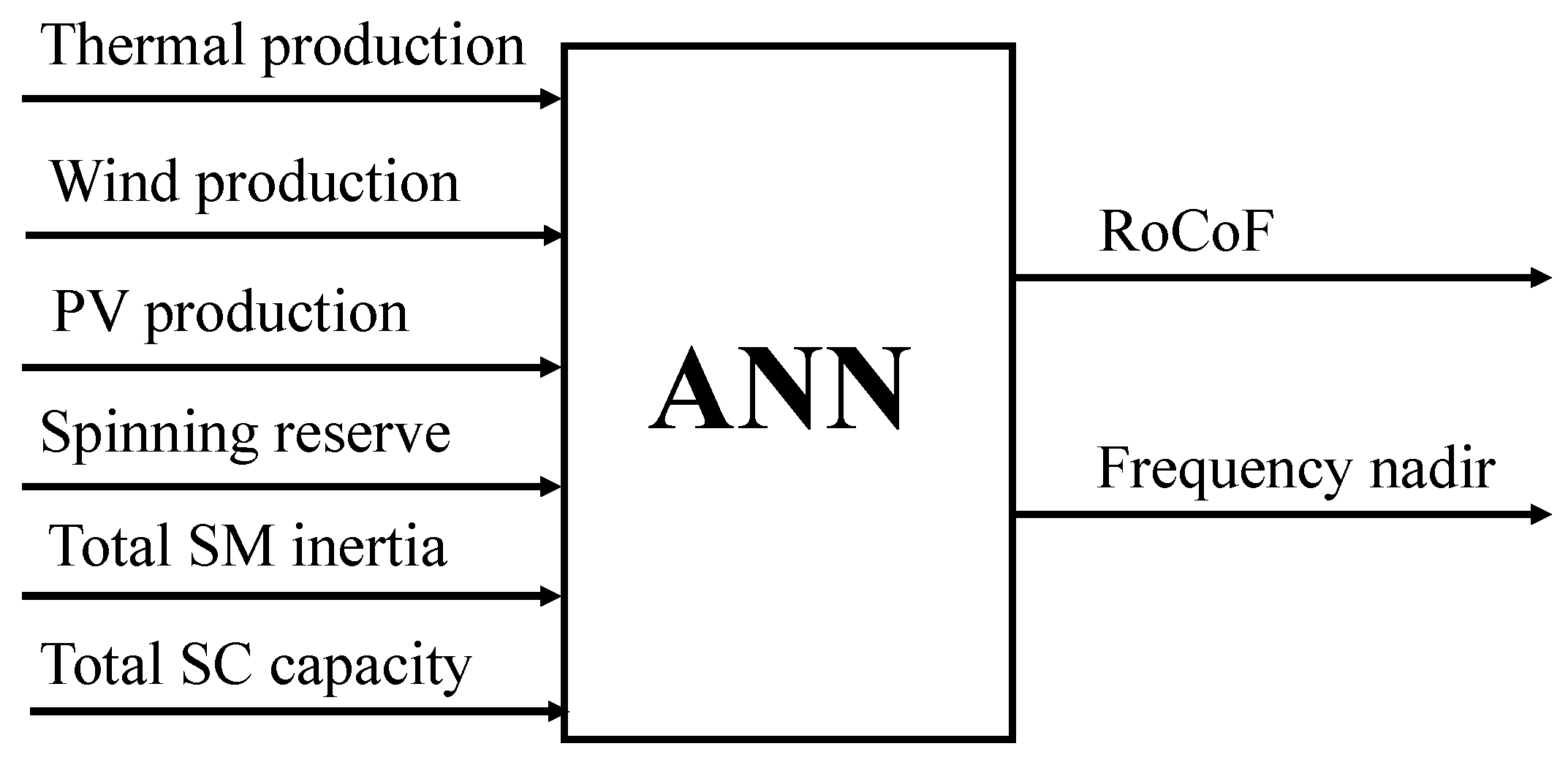
4.2. ANN Architecture
- Event 1: Short-circuit: B1–B2 line;
- Event 2: Short-circuit: B12;
- Event 3: Short-circuit: B9.
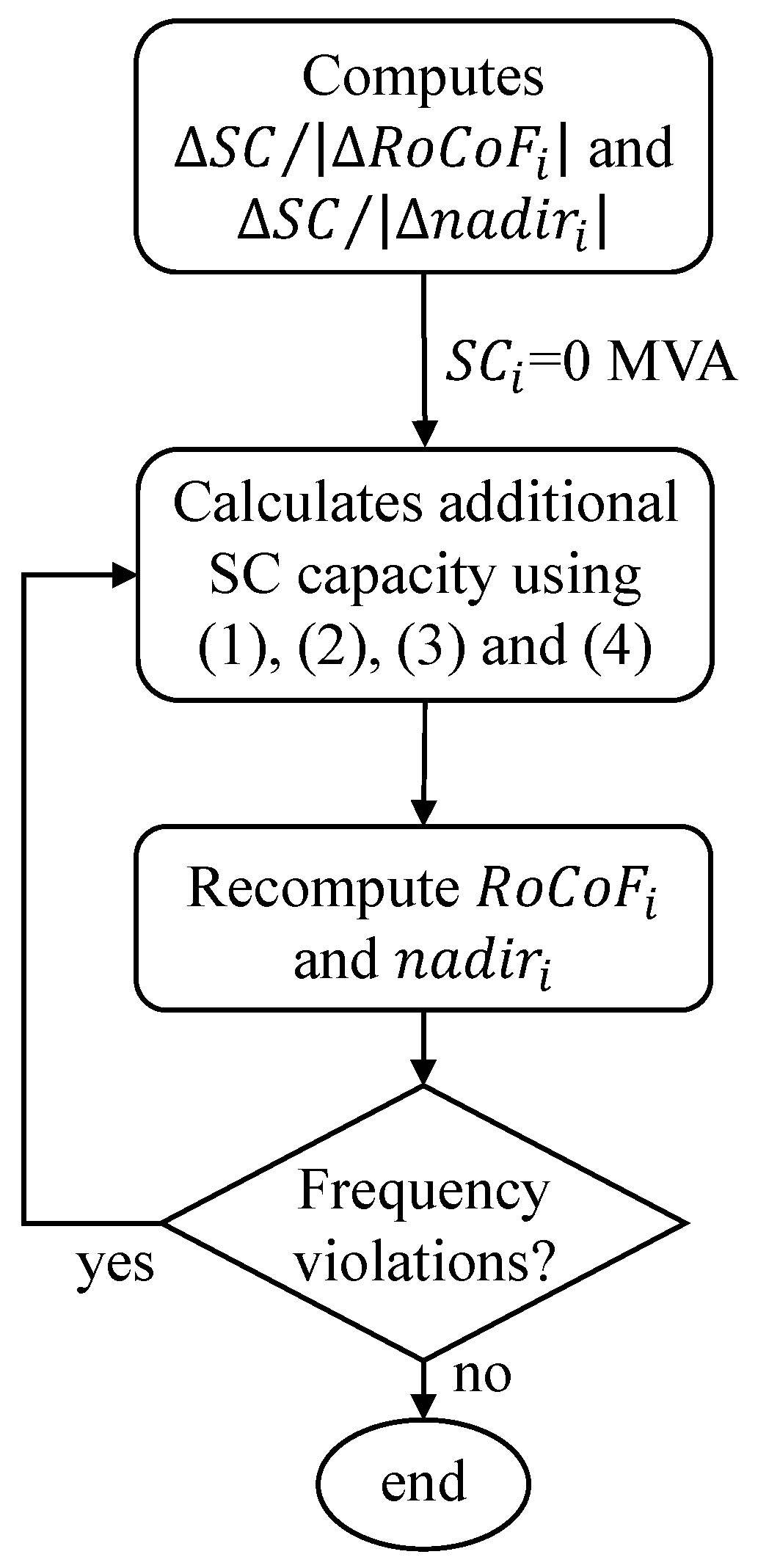
4.3. Computing Minimum Synchronous Inertia
5. Simulations and Analysis of the Results
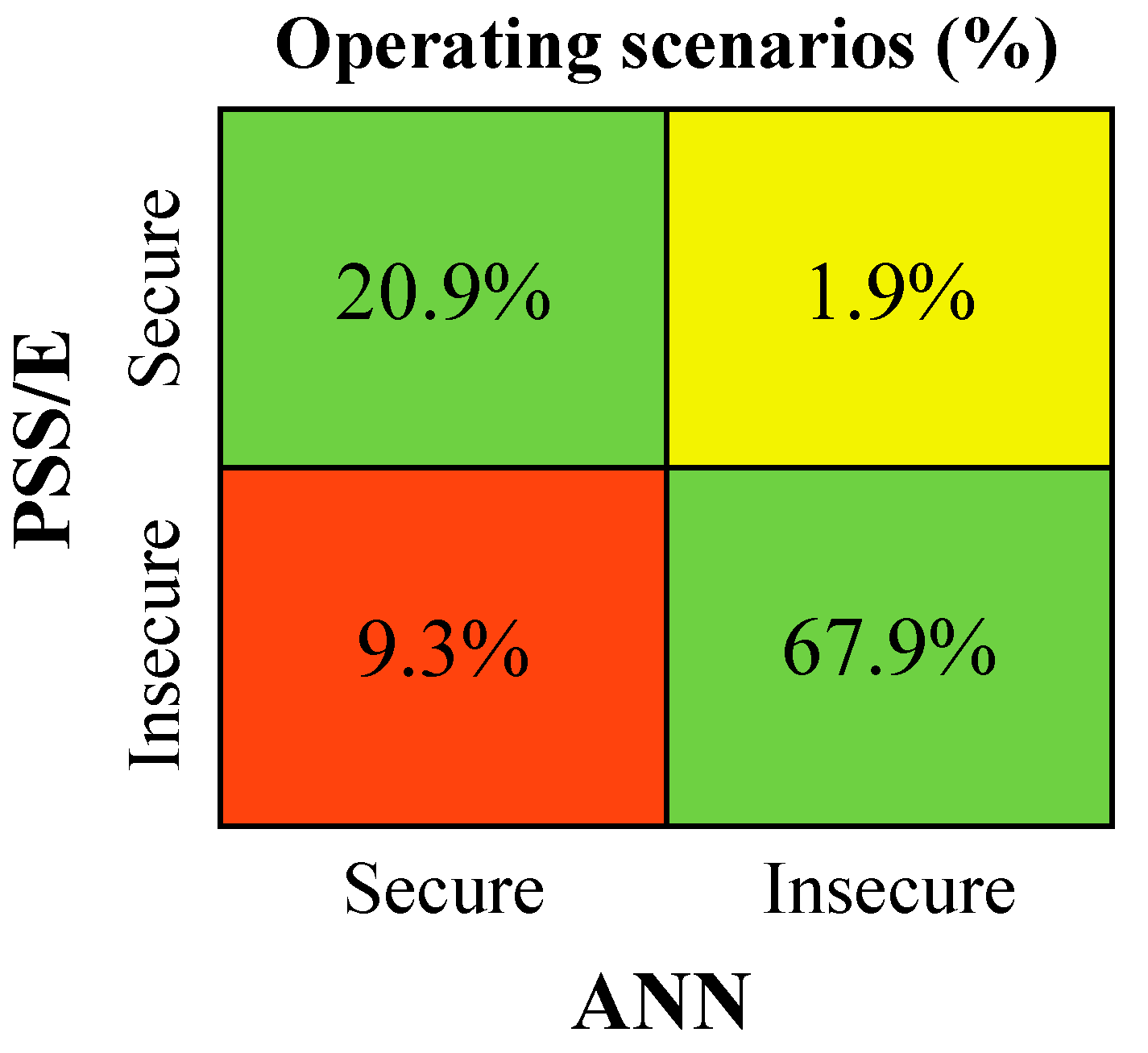
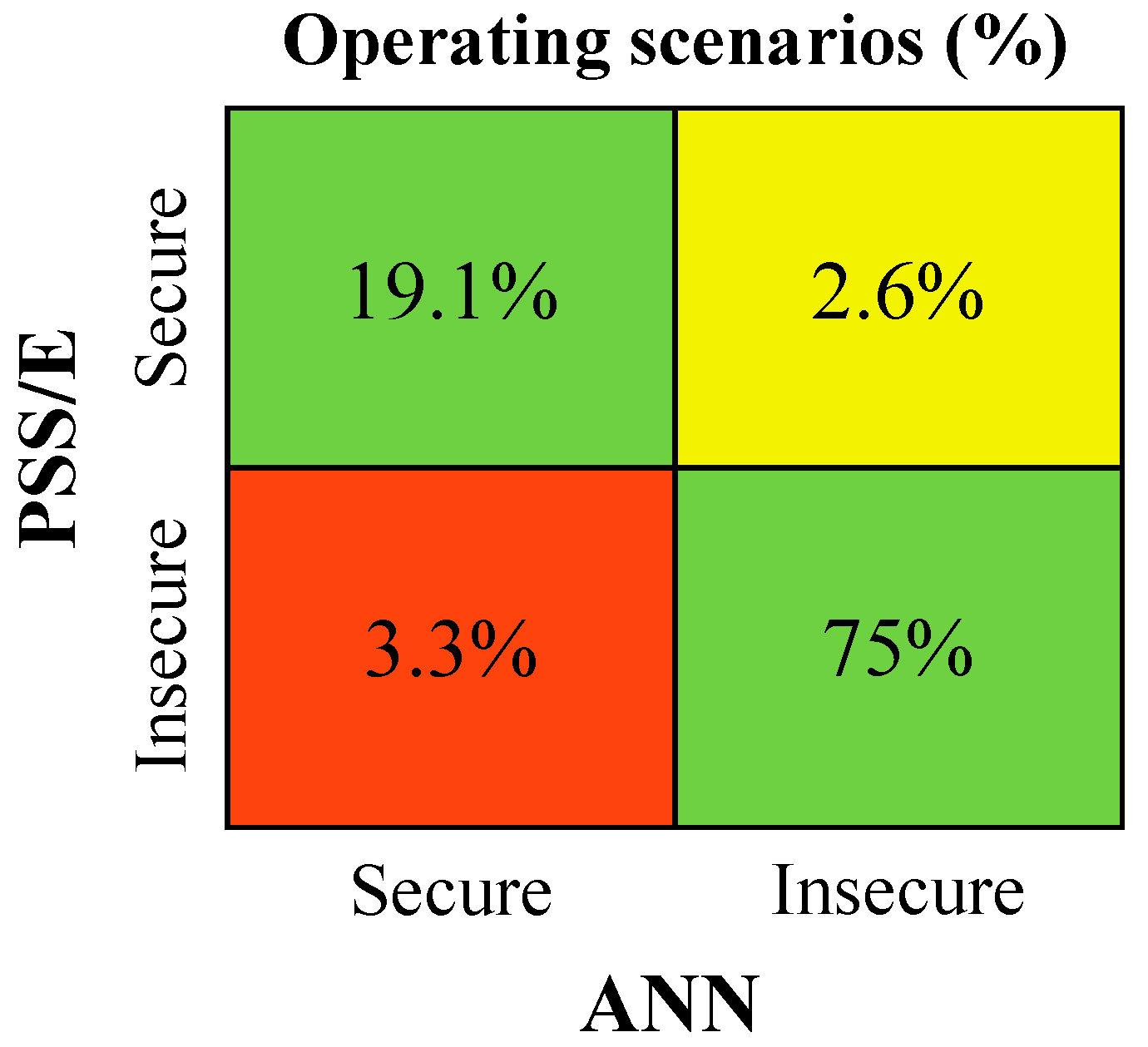
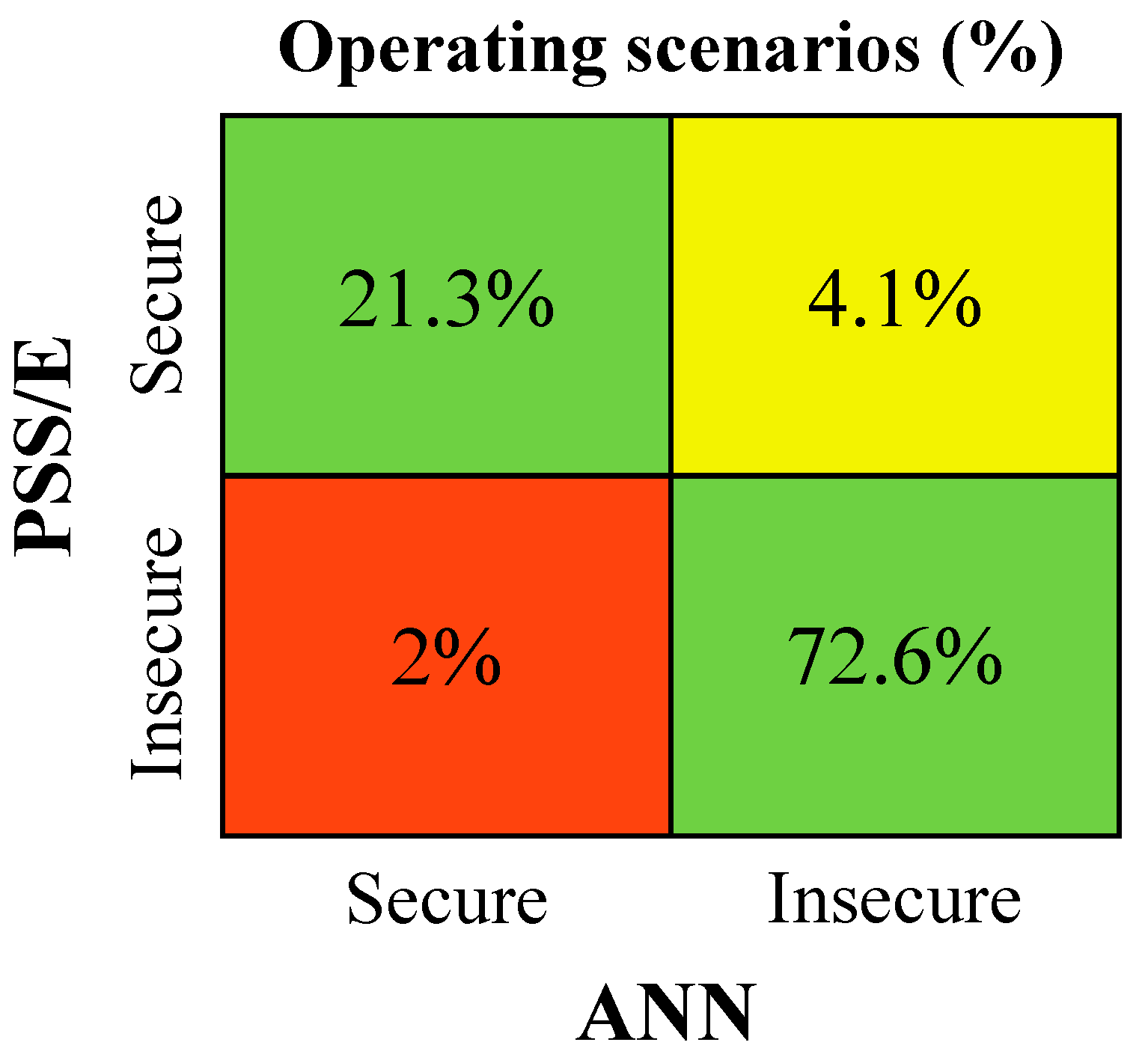
5.1. ANN Performance Evaluation
5.2. Influence of the Fault Location in the Dynamic Stability
5.3. Minimum Synchronous Inertia Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vasconcelos, H.; Moreira, C.; Madureira, A.; Lopes, J.P.; Miranda, V. Advanced Control Solutions for Operating Isolated Power Systems: Examining the Portuguese Islands. IEEE Electrif. Mag. 2015, 3, 25–35. [Google Scholar] [CrossRef]
- Margaris, I.D.; Papathanassiou, S.A.; Hatziargyriou, N.D.; Hansen, A.D.; Sorensen, P. Frequency Control in Autonomous Power Systems with High Wind Power Penetration. IEEE Trans. Sustain. Energy 2012, 3, 189–199. [Google Scholar] [CrossRef]
- Lagos, D.T.; Hatziargyriou, N.D. Data-Driven Frequency Dynamic Unit Commitment for Island Systems With High RES Penetration. IEEE Trans. Power Syst. 2021, 36, 4699–4711. [Google Scholar] [CrossRef]
- Psarros, G.N.; Karamanou, E.G.; Papathanassiou, S.A. Feasibility Analysis of Centralized Storage Facilities in Isolated Grids. IEEE Trans. Sustain. Energy 2018, 9, 1822–1832. [Google Scholar] [CrossRef]
- Beires, P.P.; Moreira, C.L.; Lopes, J.P.; Figueira, A.G. Defining connection requirements for autonomous power systems. IET Renew. Power Gener. 2019, 14, 3–12. [Google Scholar] [CrossRef]
- Gu, H.; Yan, R.; Saha, T.K. Minimum Synchronous Inertia Requirement of Renewable Power Systems. IEEE Trans. Power Syst. 2017, 33, 1533–1543. [Google Scholar] [CrossRef]
- Vasconcelos, H.; Fidalgo, J.N.; Lopes, J.A.P. A General Approach for Security Monitoring and Preventive Control of Networks with Large Wind Power Production. In Proceedings of the Power Systems Computation Conference (PSCC), Seville, Spain, 24–28 June 2002. [Google Scholar]
- Karapidakis, E.; Hatziargyriou, N. Online preventive dynamic security of isolated power systems using decision trees. IEEE Trans. Power Syst. 2002, 17, 297–304. [Google Scholar] [CrossRef]
- O’Sullivan, J.; O’Malley, M. A new methodology for the provision of reserve in an isolated power system. IEEE Trans. Power Syst. 1999, 14, 519–524. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Saenz, J.R.; Criado, R.; Rehtanz, C.; Handschin, E.; Caldecott, R.; Mazon, A.J.; Sebo, S.A.; Ostolaza, J.X.; Allan, R.N.; et al. Preliminary results from the More Advanced Control Advice Project for secure operation of isolated power systems with increased renewable energy penetration and storage. In Proceedings of the 2001 IEEE Porto Power Tech Proceedings, Porto, Portugal, 10–13 September 2001; Volume 4. [Google Scholar]
- Zhang, R.; Xu, Y.; Dong, Z.Y.; Meng, K.; Xu, Z. Intelligent systems for power system dynamic security assessment: Review and classification. In Proceedings of the 2011 4th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Weihai, China, 6–9 July 2011; pp. 134–139. [Google Scholar]
- Sun, K.; Likhate, S.; Vittal, V.; Kolluri, V.S.; Mandal, S. An Online Dynamic Security Assessment Scheme Using Phasor Measurements and Decision Trees. IEEE Trans. Power Syst. 2007, 22, 1935–1943. [Google Scholar] [CrossRef]
- Liu, C.; Sun, K.; Rather, Z.H.; Chen, Z.; Bak, C.L.; Thogersen, P.; Lund, P. A Systematic Approach for Dynamic Security Assessment and the Corresponding Preventive Control Scheme Based on Decision Trees. IEEE Trans. Power Syst. 2013, 29, 717–730. [Google Scholar] [CrossRef]
- Trovato, V.; Bialecki, A.; Dallagi, A. Unit Commitment with Inertia-Dependent and Multispeed Allocation of Frequency Response Services. IEEE Trans. Power Syst. 2019, 34, 1537–1548. [Google Scholar] [CrossRef]
- Zhang, Z.; Du, E.; Teng, F.; Zhang, N.; Kang, C. Modeling Frequency Dynamics in Unit Commitment with a High Share of Renewable Energy. IEEE Trans. Power Syst. 2020, 35, 4383–4395. [Google Scholar] [CrossRef]
- Ahmadi, H.; Ghasemi, H. Security-Constrained Unit Commitment with Linearized System Frequency Limit Constraints. IEEE Trans. Power Syst. 2014, 29, 1536–1545. [Google Scholar] [CrossRef]
- Badesa, L.; Teng, F.; Strbac, G. Simultaneous Scheduling of Multiple Frequency Services in Stochastic Unit Commitment. IEEE Trans. Power Syst. 2019, 34, 3858–3868. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Sarasúa, J.I.; Chazarra, M.; Vigueras-Rodríguez, A.; Muñoz, D.F.; Molina-García, A. Frequency control analysis based on unit commitment schemes with high wind power integration: A Spanish isolated power system case study. Int. J. Electr. Power Energy Syst. 2020, 121, 106044. [Google Scholar] [CrossRef]
- Wen, Y.; Li, W.; Huang, G.; Liu, X. Frequency Dynamics Constrained Unit Commitment with Battery Energy Storage. IEEE Trans. Power Syst. 2016, 31, 5115–5125. [Google Scholar] [CrossRef]
- Paturet, M.; Markovic, U.; Delikaraoglou, S.; Vrettos, E.; Aristidou, P.; Hug, G. Stochastic Unit Commitment in Low-Inertia Grids. IEEE Trans. Power Syst. 2020, 35, 3448–3458. [Google Scholar] [CrossRef]
- O’Sullivan, J.; Rogers, A.; Flynn, D.; Smith, P.; Mullane, A.; O’Malley, M. Studying the Maximum Instantaneous Non-Synchronous Generation in an Island System—Frequency Stability Challenges in Ireland. IEEE Trans. Power Syst. 2014, 29, 2943–2951. [Google Scholar] [CrossRef]
- Du, P.; Matevosyan, J. Forecast System Inertia Condition and Its Impact to Integrate More Renewables. IEEE Trans. Smart Grid 2018, 9, 1531–1533. [Google Scholar] [CrossRef]
- Li, W.; Du, P.; Lu, N. Design of a New Primary Frequency Control Market for Hosting Frequency Response Reserve Offers From Both Generators and Loads. IEEE Trans. Smart Grid 2018, 9, 4883–4892. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions-A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Beires, P.; Vasconcelos, M.H.; Moreira, C.L.; Peças Lopes, J.A. Stability of autonomous power systems with reversible hydro power plants: A study case for large scale renewables integration. Electr. Power Syst. Res. 2018, 158, 1–14. [Google Scholar] [CrossRef]
- Australian Energy Market Operator (AEMO). Renewable Integration Study Stage 1 Report. Appendix B: Frequency Control; AEMO: Sydney, Australia, 2020. [Google Scholar]
- Power Engineering International; ABB. Webinar: Deploying Synchronous Condensers to Boost Grid Quality and Resilience; ABB: Zürich, Switzerland, 2019. [Google Scholar]
- Kingma, D.P.; Ba, J.L. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations (ICLR) 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thermal Unit | S (MVA) | (MW) | H (s) | Merit Order |
|---|---|---|---|---|
| S. S1–S2 | 20 | 7/14.2 | 3.82 | 1, 15 |
| S. D1–D2 | 15.35 | 3.07/11.1 | 2.45 | 10–11 |
| S. D3–D5 | 29.35 | 4.99/19.1 | 1.674 | 12–14 |
| S. G1 | 26.75 | 2.94/20.06 | 3.18 | 16 |
| S. G2 | 39.8 | 5.17/27.86 | 3 | 17 |
| S. G3 | 26.25 | 2.89/19.95 | 2.5 | 18 |
| S. G4 | 47.5 | 5.23/27.6 | 1.5 | 2 |
| S.R. D1–D7 | 21.345 | 5.8/17.1 | 2 | 3–9 |
| Event | Description | RMSE (RoCoF) | RMSE (Nadir) |
|---|---|---|---|
| 1 | Short-circuit: B1–B2 line | 0.0047 | 0.0023 |
| 2 | Short-circuit: B12 | 0.0036 | 0.0019 |
| 3 | Short-circuit: B9 | 0.0037 | 0.0020 |
| Scenario | Load (MW) | Wind (MW) | PV (MW) | Inertia (s) |
|---|---|---|---|---|
| 1 | 76 | 42.4 | 29.3 | 1.48 |
| 2 | 51.7 | 3 | 34.1 | 1.48 |
| 3 | 122.7 | 48.4 | 31 | 1.9 |
| 4 | 83.6 | 31.4 | 2 | 2.3 |
| 5 | 54.3 | 39.4 | 6.3 | 0.76 |
| Scenario | ANN | PSS/E | ||
|---|---|---|---|---|
| RoCoF (Hz/s) | Nadir (Hz) | RoCoF (Hz/s) | Nadir (Hz) | |
| 1 | −1.51 | 49.75 | −1.5 | 49.68 |
| 2 | −0.82 | 49.77 | −0.97 | 49.78 |
| 3 | −3.64 | 48.98 | −3.84 | 48.83 |
| 4 | −2.24 | 49.69 | −2.37 | 49.64 |
| 5 | −3.24 | 48.45 | −3.54 | 48.43 |
| Scenario | ANN | PSS/E | ||
|---|---|---|---|---|
| RoCoF (Hz/s) | Nadir (Hz) | RoCoF (Hz/s) | Nadir (Hz) | |
| 1 | −1.23 | 49.4 | −1.2 | 49.4 |
| 2 | −1.61 | 49.21 | −1.58 | 49.21 |
| 3 | −2.2 | 48.91 | −2.26 | 48.87 |
| 4 | −0.85 | 49.59 | −0.87 | 49.57 |
| 5 | −3.63 | 48.18 | −4.41 | 48.07 |
| Scenario | ANN | PSS/E | ||
|---|---|---|---|---|
| RoCoF (Hz/s) | Nadir (Hz) | RoCoF (Hz/s) | Nadir (Hz) | |
| 1 | −1.43 | 49.29 | −1.5 | 49.25 |
| 2 | −1.68 | 49.17 | −1.64 | 49.18 |
| 3 | −1.48 | 49.26 | −1.62 | 49.19 |
| 4 | −0.8 | 49.6 | −0.76 | 49.62 |
| 5 | −3.73 | 48.12 | −4.62 | 47.96 |
| Sc | Ev | (s) | (s) | (MVA) | RoCoF (Hz/s) | Nadir (Hz) |
|---|---|---|---|---|---|---|
| 1 | 1 | 1.48 | 0 | 0 | −1.51 | 49.75 |
| 2 | 1.48 | 0 | 0 | −1.23 | 49.4 | |
| 3 | 1.49 | 0.008 | 0.12 | −1.51 | 49.75 | |
| All | 1.49 | 0.008 | 0.12 | – | – | |
| 2 | 1 | 1.48 | 0 | 0 | −0.82 | 49.77 |
| 2 | 1.49 | 0.012 | 0.17 | −0.82 | 49.77 | |
| 3 | 1.49 | 0.014 | 0.2 | −0.82 | 49.76 | |
| All | 1.49 | 0.014 | 0.2 | – | – | |
| 3 | 1 | 3.59 | 1.69 | 24.17 | −1.92 | 49.4 |
| 2 | 3.57 | 1.67 | 23.86 | −1.93 | 49.4 | |
| 3 | 3.23 | 1.33 | 18.95 | −1.93 | 49.4 | |
| All | 3.59 | 1.69 | 24.17 | – | – | |
| 4 | 1 | 2.68 | 0.38 | 5.39 | −2 | 49.68 |
| 2 | 2.3 | 0 | 0 | −0.85 | 49.59 | |
| 3 | 2.3 | 0 | 0 | −0.8 | 49.6 | |
| All | 2.68 | 0.38 | 5.39 | – | – | |
| 5 | 1 | 2.42 | 1.66 | 23.74 | −1.26 | 49.4 |
| 2 | 2.42 | 1.66 | 23.73 | −1.26 | 49.4 | |
| 3 | 2.08 | 1.32 | 18.84 | −1.26 | 49.4 | |
| All | 2.42 | 1.66 | 23.74 | – | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gouveia, J.; Moreira, C.L.; Peças Lopes, J.A. Improving Dynamic Security in Islanded Power Systems: Quantification of Minimum Synchronous Inertia Considering Fault-Induced Frequency Deviations. Electricity 2023, 4, 114-133. https://doi.org/10.3390/electricity4020008
Gouveia J, Moreira CL, Peças Lopes JA. Improving Dynamic Security in Islanded Power Systems: Quantification of Minimum Synchronous Inertia Considering Fault-Induced Frequency Deviations. Electricity. 2023; 4(2):114-133. https://doi.org/10.3390/electricity4020008
Chicago/Turabian StyleGouveia, José, Carlos L. Moreira, and João A. Peças Lopes. 2023. "Improving Dynamic Security in Islanded Power Systems: Quantification of Minimum Synchronous Inertia Considering Fault-Induced Frequency Deviations" Electricity 4, no. 2: 114-133. https://doi.org/10.3390/electricity4020008
APA StyleGouveia, J., Moreira, C. L., & Peças Lopes, J. A. (2023). Improving Dynamic Security in Islanded Power Systems: Quantification of Minimum Synchronous Inertia Considering Fault-Induced Frequency Deviations. Electricity, 4(2), 114-133. https://doi.org/10.3390/electricity4020008