
Pseudo-Footless Domino Circuit-Based Design of Hamming (7, 4) Encoding/Decoding Complementary Metal-Oxide-Semiconductor Circuit †


Abstract
1. Introduction
2. Basic Module
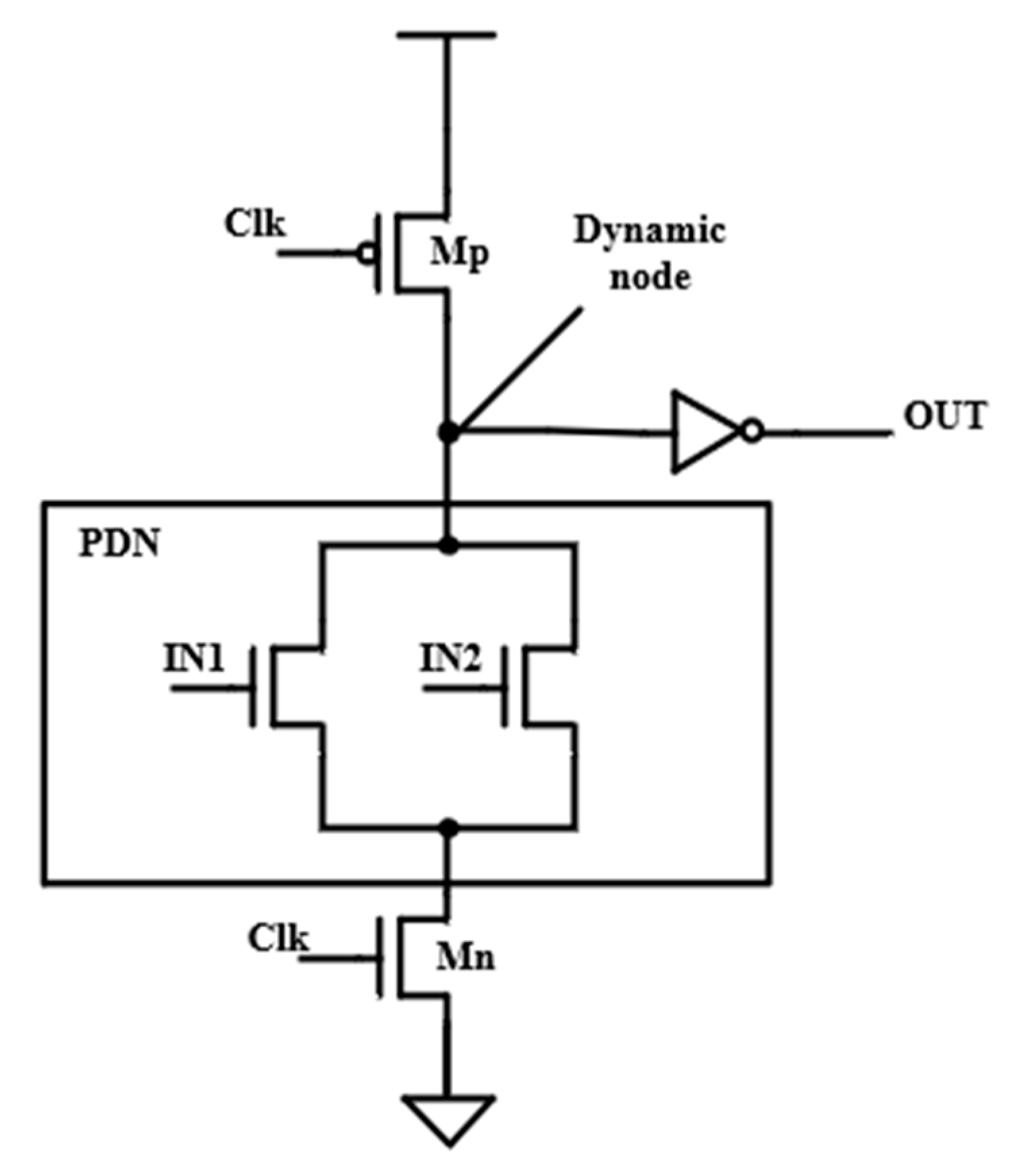
2.1. Domino Logic [3]
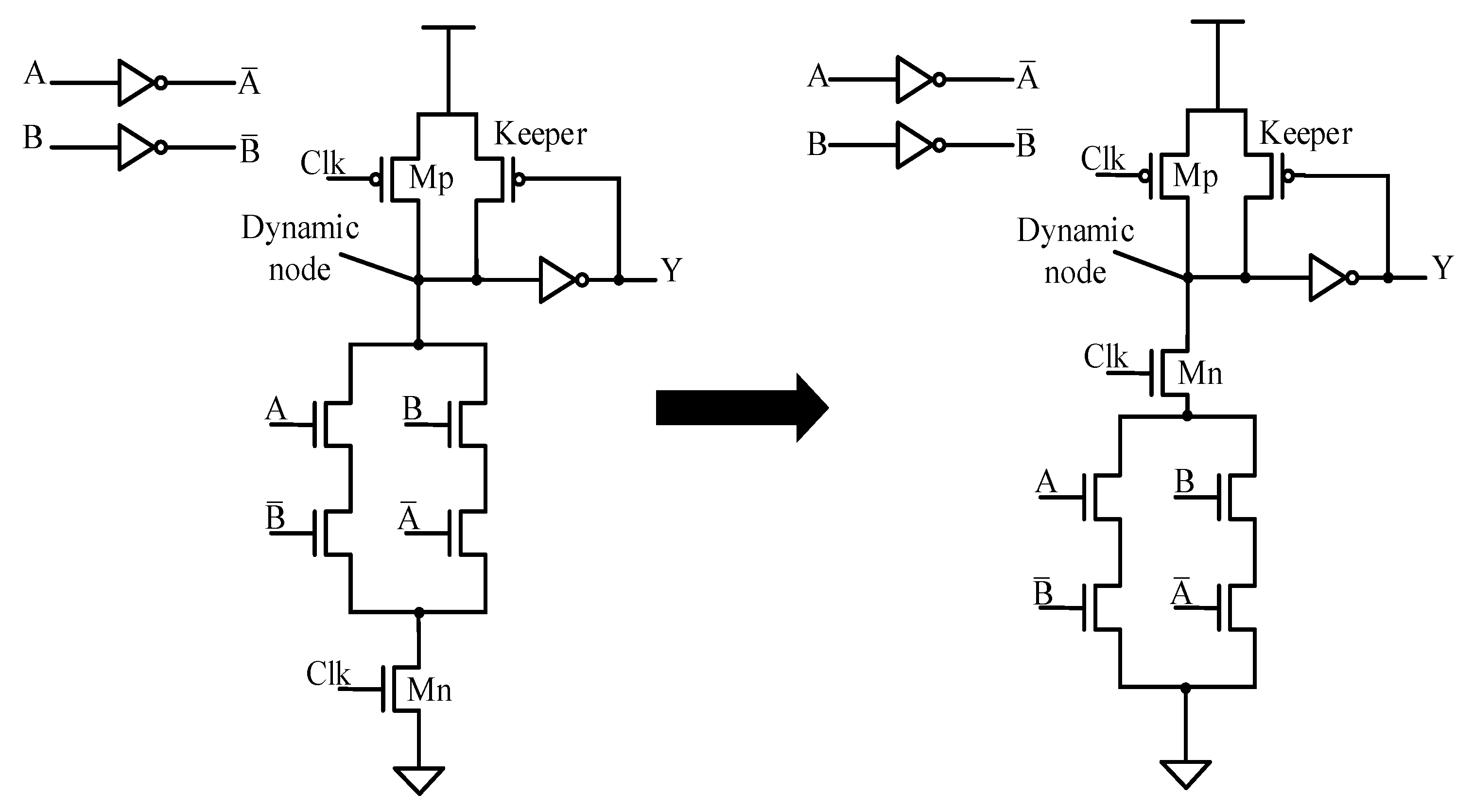
2.2. Pseudo-Footless (PF) Domino Logic [4,5]
3. Circuit Design [6,7]
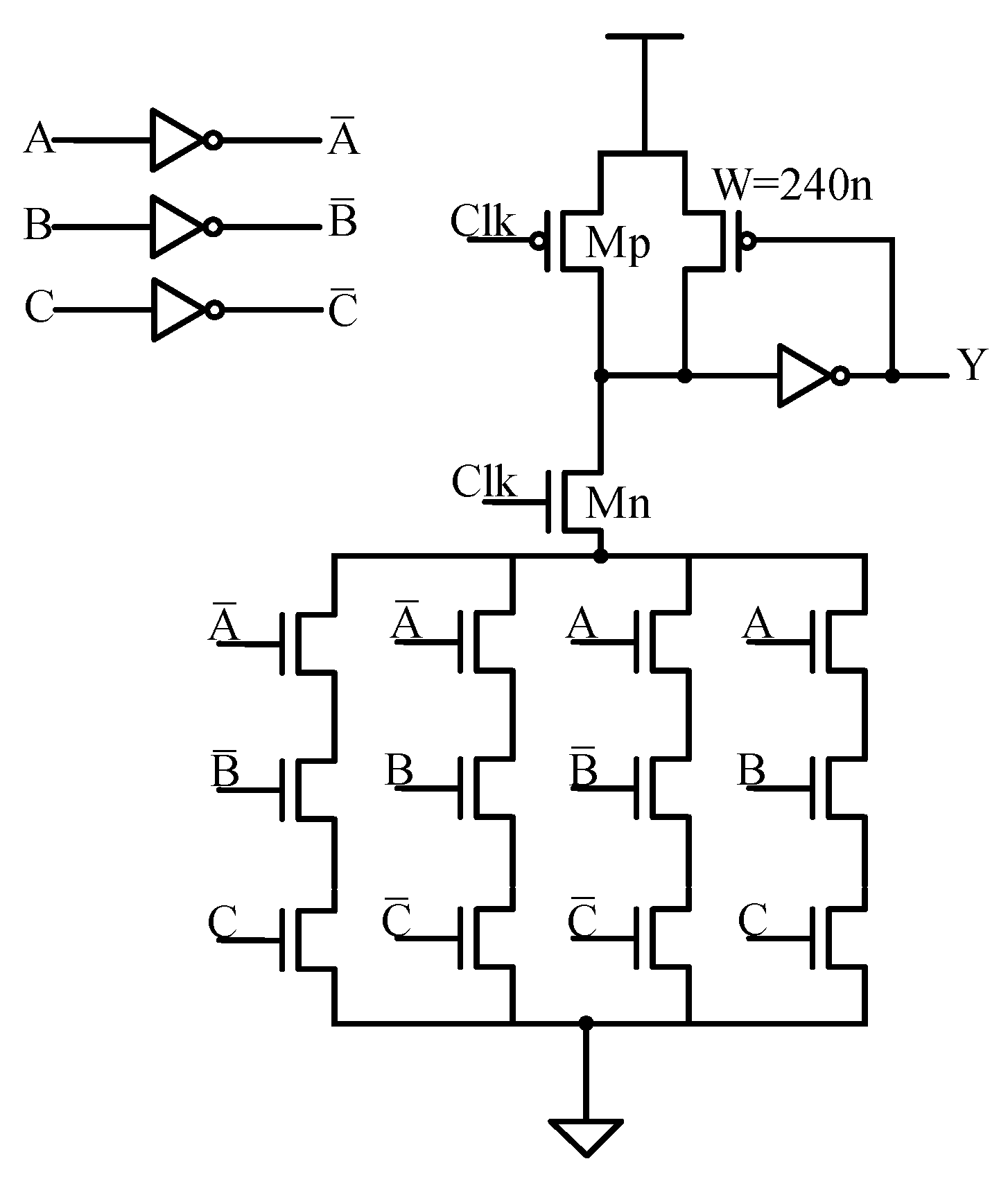
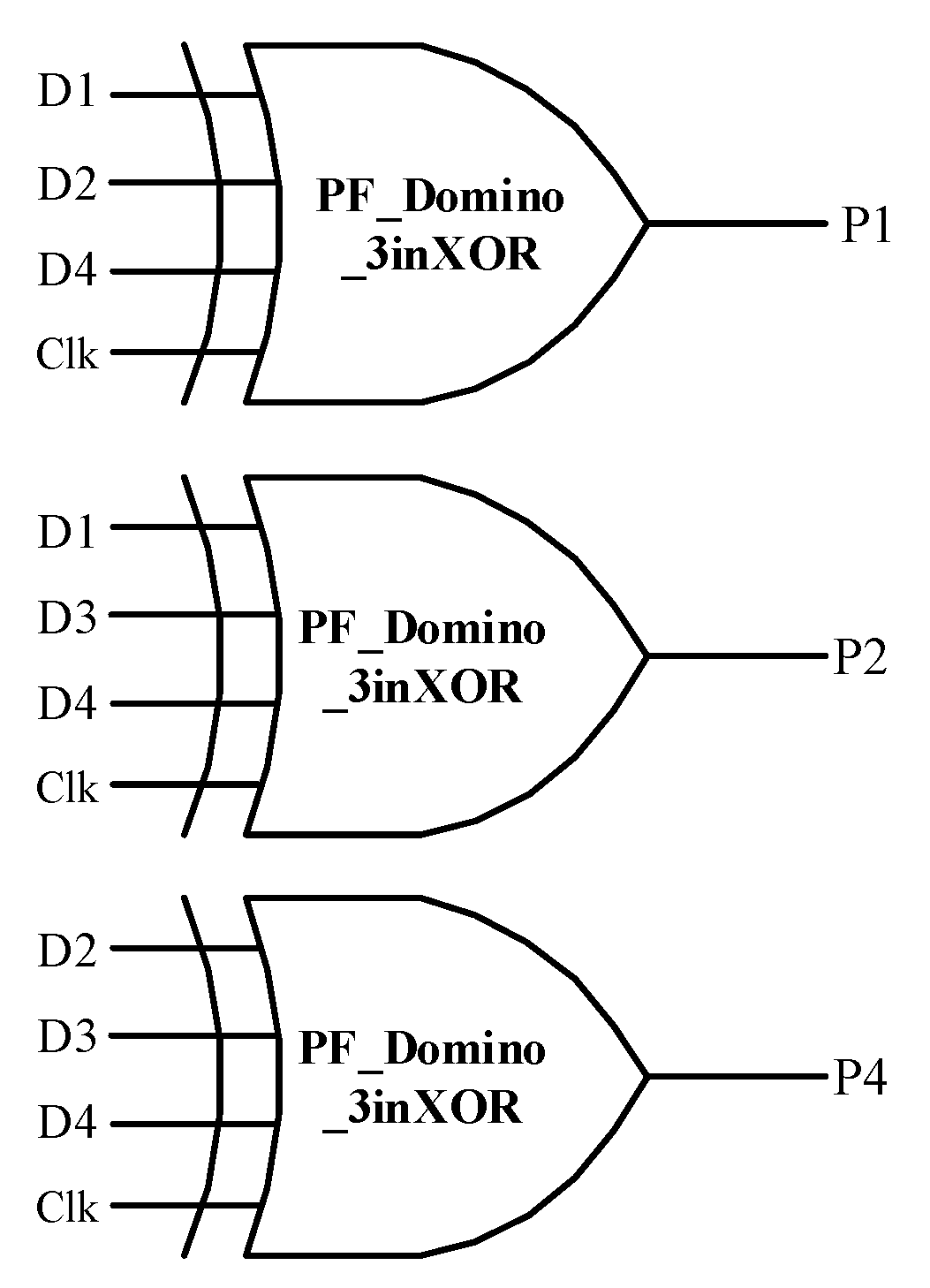
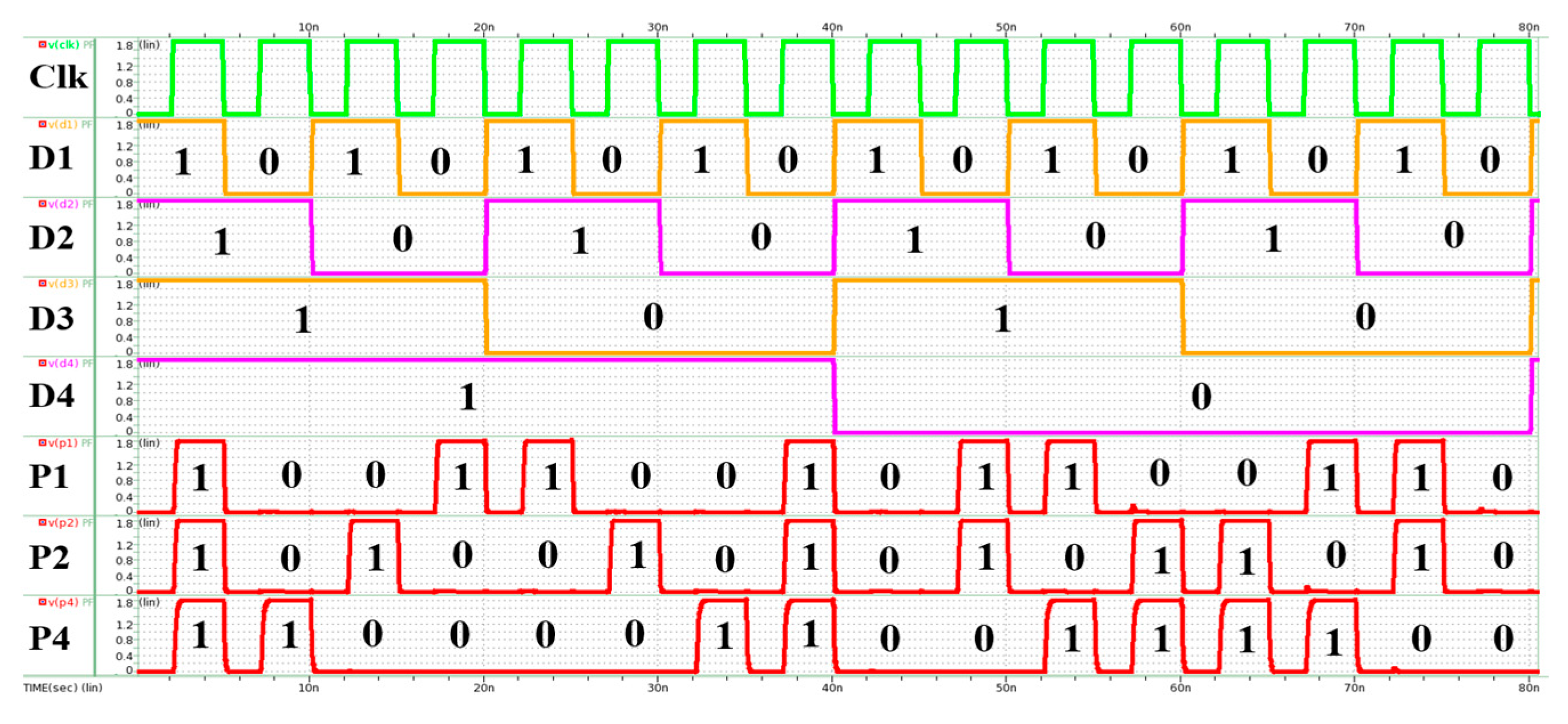
3.1. Three-Input XOR by PF Domino Circuit
3.2. Encoder Circuit for Hamming Code
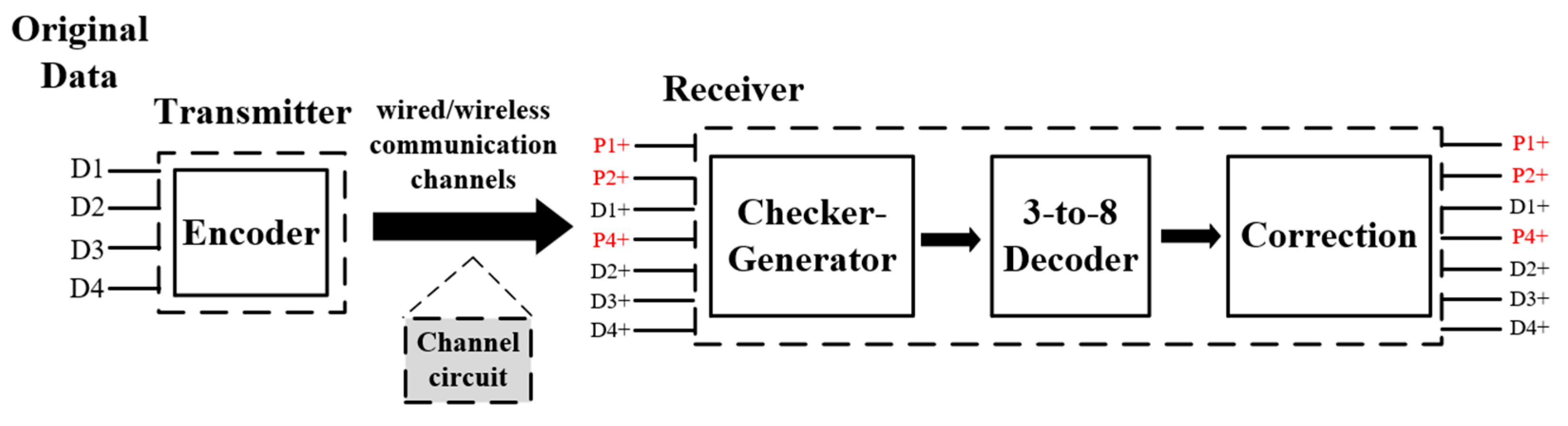
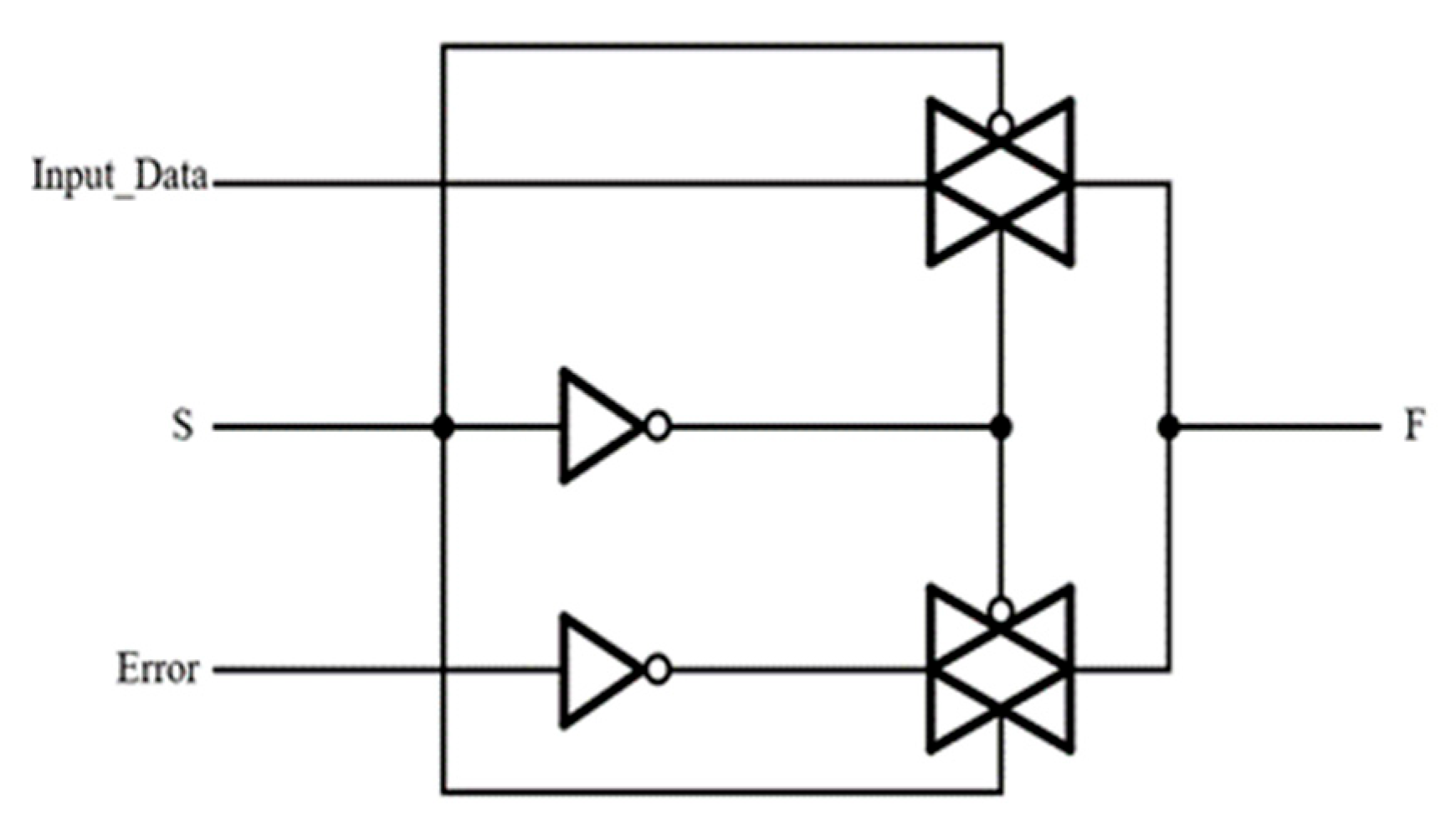
3.3. Channel Circuit
3.4. Checker Generator Ccircuit
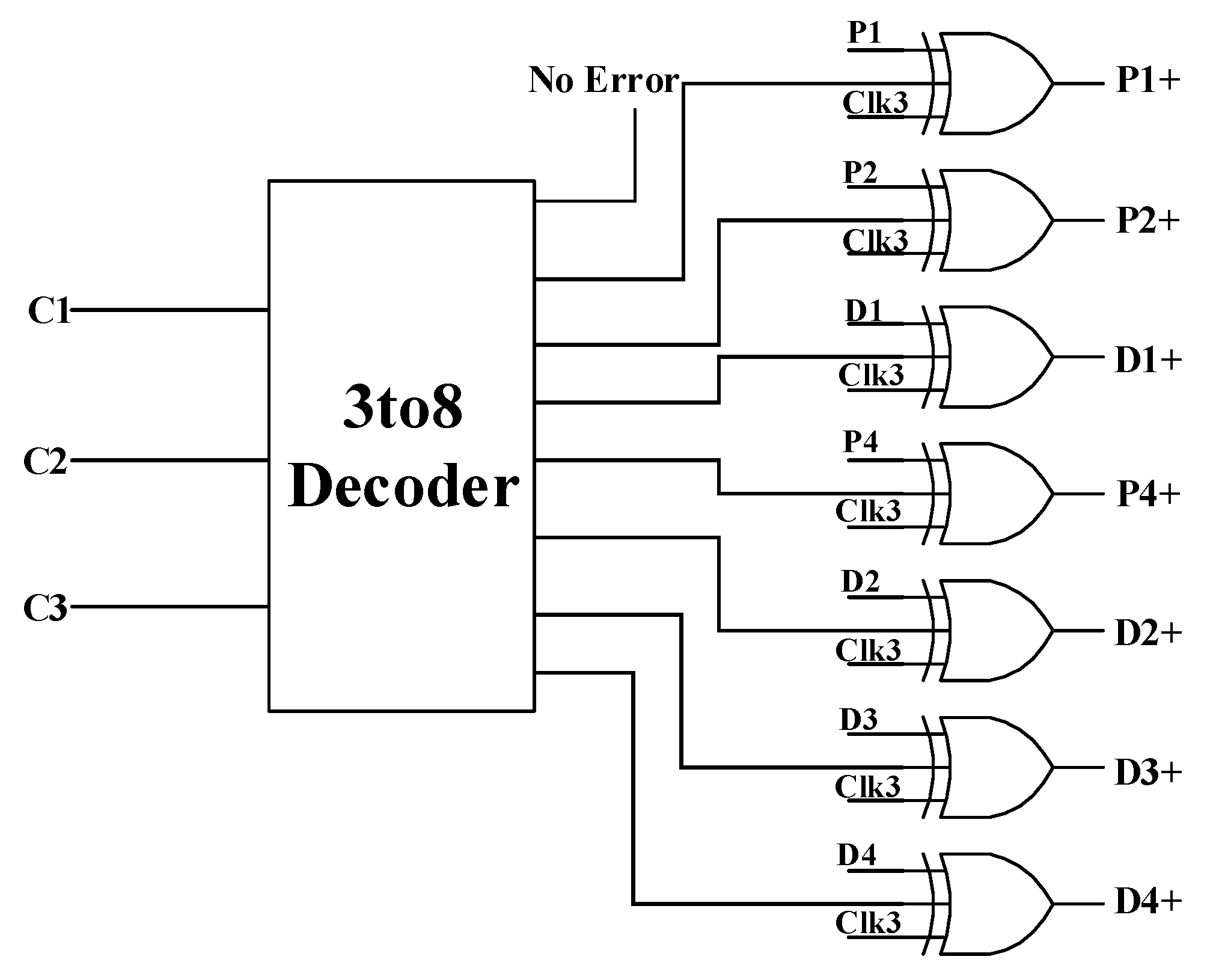
3.5. The 3-to-8 Decoder Circuit
3.6. Correction Circuit
3.7. Clock Delay Circuit [8]
4. Circuit Simulation and Analysis
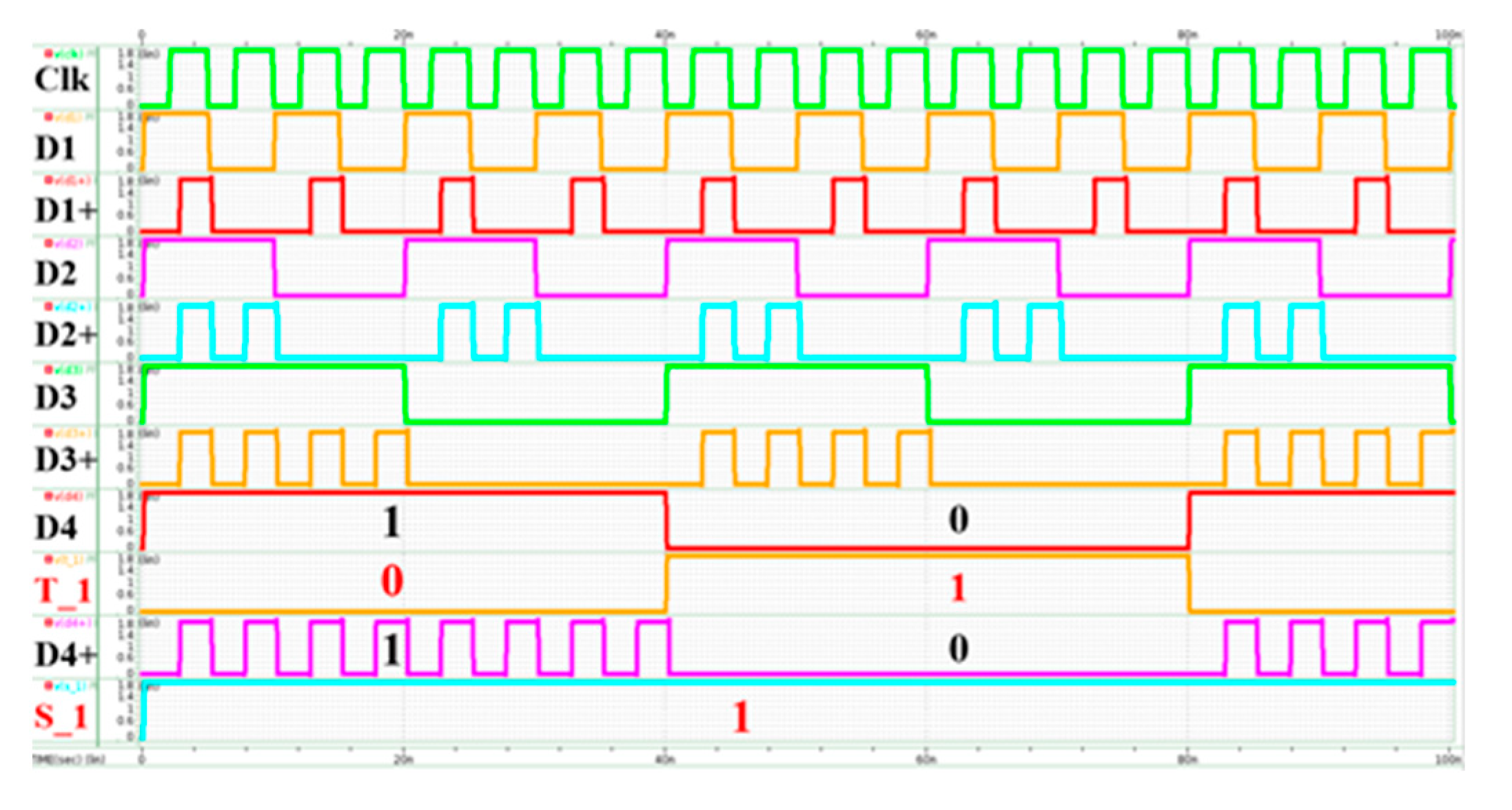
4.1. Simulation of D4 Error
4.2. Simulation of P4 Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wikipedia. Hamming Code. Available online: https://en.wikipedia.org/wiki/Hamming_code (accessed on 18 October 2023).
- Hamming, R.W. Error detecting and error correcting codes. Bell Syst. Tech. J. 1950, 29, 147–160. [Google Scholar] [CrossRef]
- Wikipedia. Domino Logic. Available online: https://en.wikipedia.org/wiki/Domino_logic (accessed on 25 October 2023).
- Chiu, W.-H.; Yeh, T.-T.; Lin, H.-R. A Conditional Isolator Technique for Wide Pseudo-Footless Domino Logic Circuits. J. Sci. Eng. Technol. 2008, 4, 13. [Google Scholar]
- Wang, J.-S.; Shieh, S.-J.; Yeh, C.-W.; Yeh, Y.-H. Pseudo-footless CMOS domino logic circuits for high-performance VLSI designs. In Proceedings of the 2004 IEEE International Symposium on Circuits and Systems (ISCAS), Vancouver, BC, Canada, 23–26 May 2004; pp. 402–403. [Google Scholar]
- Mokara, D.; Naidu, S.; Gupta, A.K. Designand implementation of Hamming Code using VHDL & DSCH. Int. J. Latest Eng. Res. Appl. (IJLERA) 2017, 2, 33–40. [Google Scholar]
- Lin, D.-L. Implementation of 8-Bit Hamming Encoder/Decoder Circuit. Master’s Thesis, Electronic Engineering from the National Chin-Yi University of Technology, Taichung, Taiwan, 2020. [Google Scholar]
- Yee, G.; Sechen, C. Clock-delayed domino for dynamic circuit design. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2000, 8, 425–430. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A | B | C | Y |
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 1 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 0 |
| 1 | 1 | 0 | 0 |
| 1 | 1 | 1 | 1 |
| PTL [3] | N-P Domino | PF Domino | |
|---|---|---|---|
| Transistors count | 232 | 357 (+54%) | 388 (+67%) |
| Power consumption @ 100 MHz | 210 μW | 347 μW (+65%) | 387 μW (+84%) |
| Delay @ 100 MHz | 1.21 ns | 377 ps (−69%) | 204 ps (−83%) |
| Maximum frequency | 250 MHz | 660 MHz (+164%) | 800 MHz (+220%) |
| Power consumption at max. frequency | 442.8 μW | 1.22 mW | 1.48 mW |
| Minimum frequency | 50 MHz | 50 MHz | 50 MHz |
| Power consumption at min. frequency | 167.6 μW | 152.6 μW | 177 μW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, K.-M.; Su, J.-C.; Hung, Y.-C. Pseudo-Footless Domino Circuit-Based Design of Hamming (7, 4) Encoding/Decoding Complementary Metal-Oxide-Semiconductor Circuit. Eng. Proc. 2025, 92, 98. https://doi.org/10.3390/engproc2025092098
Hsu K-M, Su J-C, Hung Y-C. Pseudo-Footless Domino Circuit-Based Design of Hamming (7, 4) Encoding/Decoding Complementary Metal-Oxide-Semiconductor Circuit. Engineering Proceedings. 2025; 92(1):98. https://doi.org/10.3390/engproc2025092098
Chicago/Turabian StyleHsu, Kang-Min, Jye-Chau Su, and Yu-Cherng Hung. 2025. "Pseudo-Footless Domino Circuit-Based Design of Hamming (7, 4) Encoding/Decoding Complementary Metal-Oxide-Semiconductor Circuit" Engineering Proceedings 92, no. 1: 98. https://doi.org/10.3390/engproc2025092098
APA StyleHsu, K.-M., Su, J.-C., & Hung, Y.-C. (2025). Pseudo-Footless Domino Circuit-Based Design of Hamming (7, 4) Encoding/Decoding Complementary Metal-Oxide-Semiconductor Circuit. Engineering Proceedings, 92(1), 98. https://doi.org/10.3390/engproc2025092098