
A Parametric Comparison of JARUS SORA 2.0 and 2.5 Ground Risk Models †



Abstract
1. Introduction
2. Overview of SORA Process and Changes Between SORA 2.0 and 2.5
- Two more classes are introduced for 20 m and 40 m UAs;
- Maximum speed replaces kinetic energy;
- The difference between VLOS/BVLOS is no longer present in this step;
- Both quantitative and qualitative population density descriptions are allowed, with more examples given;
- A UA weighing less than or equal to 250 g and having a maximum speed less or equal to 25 m/s is considered to have an iGRC of 1, regardless of the population density.
- M1—Strategic mitigations for ground risk, has been split up into:
- ○
- M1(A)—Sheltering: used to be part of M1 under SORA 2.0;
- ○
- M1(B)—Operational restrictions: used to be part of M1 under SORA 2.0; and
- ○
- M1(C) Tactical mitigations—Ground observation: it was part of Step #2 under SORA 2.0, and has received some modifications in SORA 2.5, such as allowing the use of technical means. Additional reductions may be claimed based on the ablity to observe the ground area where the operation takes place, so that the number of uninvolved people flown over during the operation may be significantly reduced.
- M2—Effects of UA ground impact are reduced: they still exist, as they used to in SORA 2.0.
- M3—An emergency response plan (ERP) is in place, the UAS operator is validated and effective: has been moved to OSO #08 in Step #9.
3. Use Cases
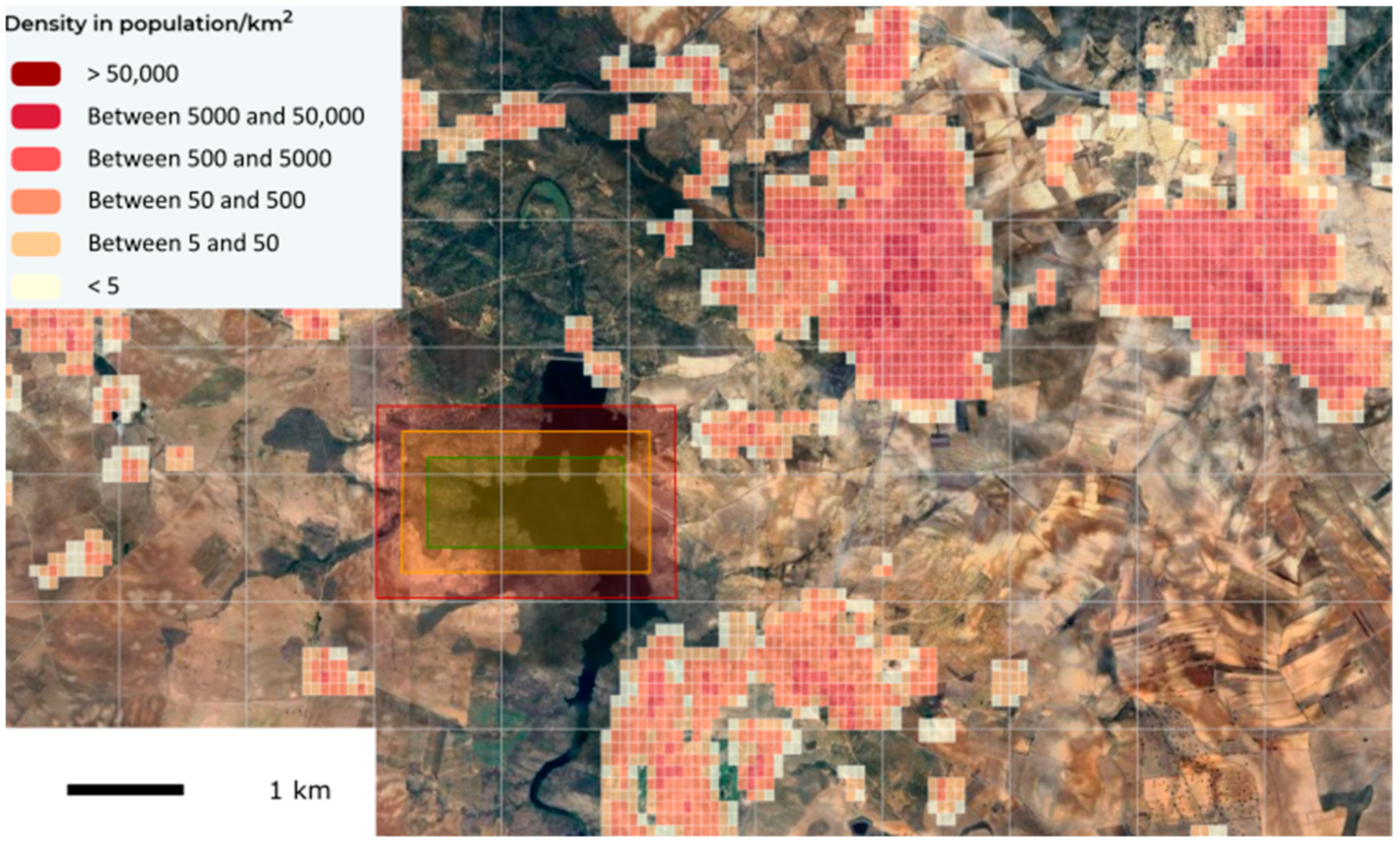
3.1. Example 1—Operation in Uncontrolled Airspace in Rural Environment
| Configuration 1: | Configuration 2: |
| Multicopter | Fixed-wing: |
| VLOS | BVLOS |
| Adjacent area: 5 km | Adjacent area: 9 km |
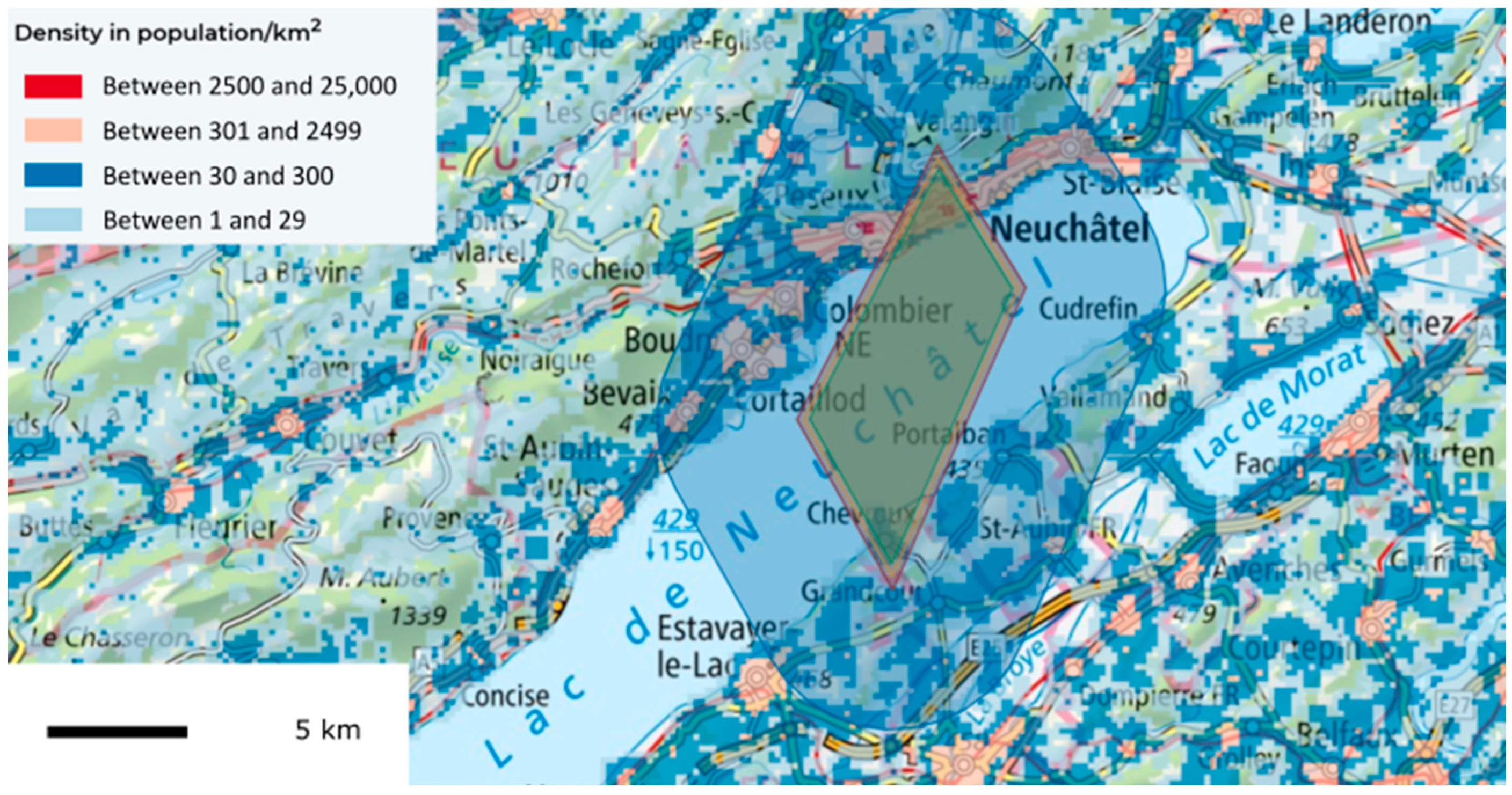
3.2. Example 2—BVLOS Long-Range Operation in Controlled Airspace in Urban Environment
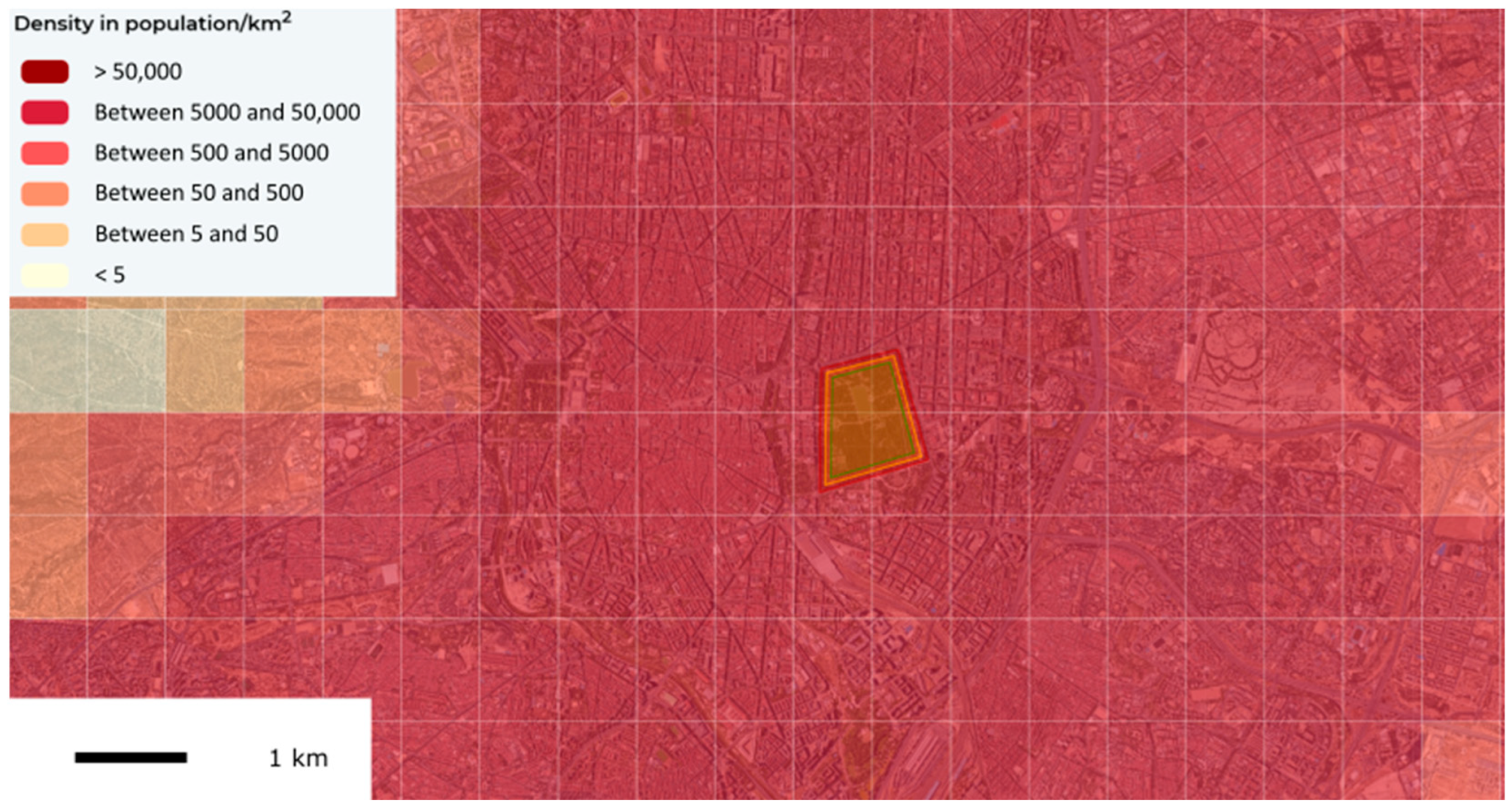
3.3. Example 3—VLOS Short-Range Operation in Controlled Airspace in Urban Environment
4. Major Findings and Discussion
5. Conclusions
- Ease the use of M1(B) and M1(C) mitigations: Greater flexibility in the application of reduced exposure time arguments during the early stages of SORA 2.5 implementation could help operators adapt. These arguments could later be removed when the UAS industry becomes more mature and capable of deploying higher SAIL operations.
- Expand the use of M2 mitigations: Given the improved practises which were developed following the release of EASA MOC Light-UAS.2512-01 by EASA [8], easing in the use of partial M2 mitigations could prove critical for certain operations. Flexibility in applying these mitigations may be especially important for missions like inspections and agriculture, which often involve very low-altitude flights and represent the biggest portion of UAS operations at the moment.
- Reevaluate population density grid resolution: Although not considered in the current article, the grid cell sizes used for population density in SORA 2.5 are not well-suited for very low-altitude operations. Adjustments to these grid sizes are essential to support current inspection and agricultural missions effectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Martinez, C.; Sanchez-Cuevas, P.J.; Gerasimou, S.; Bera, A.; Olivares-Mendez, M.A. SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones 2021, 5, 141. [Google Scholar] [CrossRef]
- Hidayat, R.; Jenie, Y.I. Implementation of SORA Methodology Version 2.5 for Medical Delivery Using Quadrotor UAS in Remote Areas. War. Penelit. Perhub. 2024, 35, 77–91. [Google Scholar] [CrossRef]
- JARUS. JARUS Guidelines on Specific Operations Risk Assessment (SORA) V2.0. Available online: http://jarus-rpas.org/wp-content/uploads/2023/07/jar_doc_06_jarus_sora_v2.0.pdf (accessed on 18 October 2024).
- JARUS. JARUS Guidelines on Specific Operations Risk Assessment (SORA) V2.5. Available online: http://jarus-rpas.org/wp-content/uploads/2024/06/SORA-v2.5-Main-Body-Release-JAR_doc_25.pdf (accessed on 18 October 2024).
- EASA. Easy Access Rules for Unmanned Aircraft Systems (Regulations (EU) 2019/947 and 2019/945). Available online: https://www.easa.europa.eu/en/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulations-eu (accessed on 18 October 2024).
- Stanev, H.; Hristozov, S. Applicability of JARUS SORA to State UAS Operations in Disaster Relief. ETR 2024, 4, 244–250. [Google Scholar] [CrossRef]
- Janik, P.; Zawistowski, M.; Fellner, R.; Zawistowski, G. Unmanned Aircraft Systems Risk Assessment Based on SORA for First Responders and Disaster Management. Appl. Sci. 2021, 11, 5364. [Google Scholar] [CrossRef]
- EASA. Means of Compliance with Light-UAS.2512. Available online: https://www.easa.europa.eu/en/downloads/137609/en (accessed on 18 October 2024).

{kind=link}
{kind=link}
{kind=link}
| SORA 2.0 | SORA 2.5 | |||
|---|---|---|---|---|
| UA | Multicopter | Fixed-wing | Multicopter | Fixed-wing |
| iGRC | 3 | 4 | 3 | 3 |
| M1 | No | No | No | No |
| M2 | No | No | No | No |
| Final GRC | 3 | 4 | 3 | 3 |
| SAIL | II | III | II | II |
| Adjacent population density (irrelevant in SORA 2.0) | <500 ppl/km2 (sheltering assumed) | <5000 ppl/km2 (sheltering possible) | ||
| Adjacent ARC-d (irrelevant in SORA 2.5) | No | No | ||
| Containment requirements | Low | Medium | SAIL II UAS: | |
| Low | Medium | |||
| SAIL III and above UAS: | ||||
| Low | Medium | |||
| SORA 2.0 | SORA 2.5 | |
|---|---|---|
| iGRC | 8 | 7 |
| M1 | −1 | −1 |
| M2 | −1 | −1 |
| Final GRC | 6 | 5 |
| SAIL | V | IV |
| Adjacent population density (irrelevant in SORA 2.0) | <5000 ppl/km2 (sheltering not possible) | |
| Adjacent ARC-d (irrelevant in SORA 2.5) | Yes | |
| Adjacent assemblies of people (<1 km only in SORA 2.5) | Not assessed | Not assessed |
| Containment requirements | Medium | SAIL III and above UAS: |
| Medium |
| SORA 2.0 | SORA 2.5 | ||
|---|---|---|---|
| UA | Multicopter | >250 g | <250 g |
| iGRC | 4 | 6 | 1 |
| M1 | −1 | −1 | N/A |
| M2 | No | No | No |
| Final GRC | 3 | 5 | 1 |
| SAIL | II | IV | II |
| Adjacent population density (irrelevant in SORA 2.0) | <50,000 ppl/km2 (sheltering assumed) | <50,000 ppl/km2 (sheltering possible) | |
| Adjacent ARC-d (irrelevant in SORA 2.5) | Yes | ||
| Adjacent assemblies of people (<1 km only in SORA 2.5) | Yes | Yes 40,000 to 400,000 | Yes 40,000 to 400,000 |
| Containment requirements | Medium | SAIL II UAS: | |
| Medium | Low | ||
| SAIL III and above UAS: | |||
| Low | Low | ||
| Size | <1 m | <3 m | <8 m | <20 m | <40 m | |||||||||||
| Population density VLOS assumed | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | |
| Controlled G. Area. | 1 | 1 | 0 | 2 | 1 | −1 | 3 | 2 | −1 | 4 | 3 | −1 | 4 | 3 | −1 | |
| Sparsely | <5 | 2 | 2 | 0 | 3 | 3 | 0 | 4 | 4 | 0 | 5 | 5 | 0 | 5 | 6 | 1 |
| <50 | 2 | 3 | 1 | 3 | 4 | 1 | 4 | 5 | 1 | 5 | 6 | 1 | 5 | 7 | 2 | |
| <500 | 2 | 4 | 2 | 3 | 5 | 2 | 4 | 6 | 2 | 5 | 7 | 2 | 5 | 8 | 3 | |
| Populated | <5000 | 4 | 5 | 1 | 5 | 6 | 1 | 6 | 7 | 1 | 8 | 8 | 0 | 8 | 9 | 1 |
| <50,000 | 4 | 6 | 2 | 5 | 7 | 2 | 6 | 8 | 2 | 8 | 9 | 1 | 8 | 10 | 2 | |
| Assembly | >50,000/Assembly | 7 | 7 | 0 | N/A | 8 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A |
| Size | <1 m | <3 m | <8 m | <20 m | <40 m | |||||||||||
| Population density BVLOS assumed | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | 2.0 | 2.5 | Δ | |
| Controlled G. Area. | 1 | 1 | 0 | 2 | 1 | −1 | 3 | 2 | −1 | 4 | 3 | −1 | 4 | 3 | −1 | |
| Sparsely | <5 | 3 | 2 | −1 | 4 | 3 | −1 | 5 | 4 | −1 | 6 | 5 | −1 | 6 | 6 | 0 |
| <50 | 3 | 3 | 0 | 4 | 4 | 0 | 5 | 5 | 0 | 6 | 6 | 0 | 6 | 7 | 1 | |
| <500 | 3 | 4 | 1 | 4 | 5 | 1 | 5 | 6 | 1 | 6 | 7 | 1 | 6 | 8 | 2 | |
| Populated | <5000 | 5 | 5 | 0 | 6 | 6 | 0 | 8 | 7 | −1 | 10 | 8 | −2 | 10 | 9 | −1 |
| <50,000 | 5 | 6 | 1 | 6 | 7 | 1 | 8 | 8 | 0 | 10 | 9 | −1 | 10 | 10 | 0 | |
| Assembly | >50,000/Assembly | 8 | 7 | −1 | N/A | 8 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
del Estal Herrero, A.; Apter, N.; Hristozov, S. A Parametric Comparison of JARUS SORA 2.0 and 2.5 Ground Risk Models. Eng. Proc. 2025, 90, 47. https://doi.org/10.3390/engproc2025090047
del Estal Herrero A, Apter N, Hristozov S. A Parametric Comparison of JARUS SORA 2.0 and 2.5 Ground Risk Models. Engineering Proceedings. 2025; 90(1):47. https://doi.org/10.3390/engproc2025090047
Chicago/Turabian Styledel Estal Herrero, Alejandro, Nathanel Apter, and Stefan Hristozov. 2025. "A Parametric Comparison of JARUS SORA 2.0 and 2.5 Ground Risk Models" Engineering Proceedings 90, no. 1: 47. https://doi.org/10.3390/engproc2025090047
APA Styledel Estal Herrero, A., Apter, N., & Hristozov, S. (2025). A Parametric Comparison of JARUS SORA 2.0 and 2.5 Ground Risk Models. Engineering Proceedings, 90(1), 47. https://doi.org/10.3390/engproc2025090047