1. Introduction
The current navigation systems providing integrity services to GNSS users rely on ground infrastructure to elaborate the integrity information that is broadcasted to the user. LEO (Low-Earth-Orbit) mega-constellations provide a unique infrastructure that could be leveraged to provide alternative navigation systems, such as the LEO-PNT initiative by the ESA. In this paper, we explore options for exploiting the LEO-PNT to deliver new high-integrity navigation systems with no infrastructure on ground, providing time to alarms (TTAs) shorter than 6 s. The LEO-PNT satellites (here called LEOs for short) are used as integrity monitors of the GNSS satellites flying above the GNSS users and transmit integrity information directly to them, thus significantly improving their time to alarm performance.
The bare minimum integrity required is that the LEOs provide information to GNSS users in such a way that they can determine their PVT solution with a bounded error that is not exceeded with a given probability.
2. Exploring the Options
Different integrity concepts can be envisaged depending on the LEO constellation’s capabilities. We explore different system configurations that lead to different LEO constellations capabilities, which are laid out here.
2.1. Option 1: LEO-PNT Supports ARAIM
This is the basic option, in which the LEO-PNT constellation provides additional dual-frequency L-Band ranging measurements with a committed minimum performance and without a bespoke integrity payload. This is of interest for ARAIM users [
1], who benefit greatly from the additional geometrical redundancy provided by LEO satellites.
2.2. Option 2: User-Based Integrity with LEO-MEO Observables
This option is based on monitoring the MEO satellites at user level using LEO-MEO L-Band observables. Each LEO-PNT satellite collects LEO-MEO observables and sends these observables or a suitable by-product to the user. Then, the user individually checks each MEO against a particular hypothesis, e.g., against a given threshold, and decides whether to use that MEO satellite for generating the navigation solution.
The user monitors each MEO satellite by using the LEO satellites that are transmitting their products to the user as reference stations. This approach distributes the monitoring functionality between the LEO-PNT constellation and the user. The constellation performs MEO data collection and dissemination, while the user performs integrity processing.
2.3. Option 3: LEO Satellite-Based Integrity
As with the previous option, the LEO satellite collects MEO observables; however, with this option, an integrity monitoring algorithm is run on board the LEO satellite, sending integrity indicators, possibly per MEO, to the user. A voting algorithm would need to be used to modulate false alarms and missed detection probabilities.
2.4. Option 3: LEO Plane-Based Integrity
This option assumes that the LEO constellation is equipped with inter-plane intersatellite links. The LEO satellites on each plane share their LEO-MEO observables. Within each plane there is a selected LEO satellite for each MEO that acts as an MEO monitor. The selected monitor collects all the observables for the MEO, runs the monitoring algorithm, and returns the flag to the rest of the LEO satellites in the plane as their downlink to the user.
2.5. Selection of the Correct Integrity Approach
Table 1 below provides the justification for the proposed selection of option 2, user-based integrity, which has been chosen for further examination in this study and for upcoming projects within orbit demonstrators as it provides the best accuracy with the lowest TTA, very low on-board processing, and without the need for ISL. The downside is that it is highly demanding in the LEO-to-User bandwidth.
Three selection criteria were considered: performance, TTA, and number of on-board resources.
3. User-Based Integrity with LEO-PNT Formulation (Option 2)
3.1. Integrity Concept
In this section, the integrity monitor is discussed in the context of a broader integrity concept. We use Ithaca [
2] as a convenient source of a reference for the “Integrity Concept for EGNSS high accuracy”, which explores different users’ requirements and system configurations. We select the road use case presented in
Table 2.
3.2. LEO-PNT as a Barrier
The LEO-PNT barrier is located within the integrity GNSS FTA of the integrity concept. Ithaca also provides this tree at a convenient level of decomposition. The GNSS top event (loss of integrity) is broken down into two main branches: a Fault-Free Branch that includes the events that may lead to a loss of integrity under fault-free conditions; a Faulty Branch that further decomposes the events that may lead to a loss of integrity under failure conditions.
The integrity monitor will act as a barrier against the failure mode “Undetected (MEO) Satellite Feared Event”, which is located in the faulty branch. Underneath this failure mode node in the tree, we find events such as satellite clock jumps, pseudorange errors, etc. We can assume that between 10 and 20 events like these can be identified, leading to a split of the 1.5 × 10−6 per hour budget amongst 20 events (in the worst case scenario, assuming the probability is equal for every event), e.g., 7.5 × 10−8 per hour. This is usually split into the probability of the occurrence (per h) of the feared event and the probability of its missed detection, Pmd. We will assume that the MEO constellation has a probability of occurrence (per h) of 1 × 10−4 (per h) for each of these events, leading to a probability of missed detection, Pmd, of 7.5 × 10−4. A conservative value of 1 × 10−5 for the Pmd is selected to account for other allocations such those related to feared events occurring in the LEO-PNT satellite itself.
The FTA for continuity is not addressed in the Ithaca report, but a budget is required to stablish the false alarm probability of the integrity monitor, the Pfa. We adopt a Pfa of 1 × 10−5 for this analysis, with the justification that this is of the same magnitude as the Pmd and the Gaussian assumptions can still be checked with these values.
Finally, the magnitude of the feared event that is to be monitored is taken to be 2 m. The justification for this is made using the example of a satellite clock jump: this event is projected to the user in the same manner as it is to the LEO and it exists in the range domain; thus, when the resulting error is below 2 m in magnitude, it is expected to be covered by an AL of 3 m.
With these three values allocated, the LEO-PNT monitor will need to provide the following performances, expressed in terms of
and
(see
Table 3).
3.3. LEO-PNT Error Budget
The LEO-PNT’s barrier performance relies on the quality of the MEO observables collected by the LEO satellites and the geometry that the LEO constellation provides to the user.
Table 4 presents the LEO Equivalent Ranging Error (LERE) budget. The first two terms (A and B) are the LEO satellite’s position and synchronization. The next two terms (C and D) are the phase and code noise for the iono-free combination. Finally, these terms are added quadratically to derive the phase and code LERE in rows E and F, respectively. The more conservative values in brackets are used in the simulations to account for some uncertainties not considered in this simple budget, such as multipath errors.
3.4. User Equations
3.4.1. Basic LEO Barrier Formulation
MEO to LEO Observations
The observation residual at a given epoch for MEO i–LEO l is expressed as follows:
where
is the unit vector from the LEO satellite to the MEO satellite i.
is the error in the MEO’s position and clock according to the SiS.
is the LEO to MEO observation noise considering the LEO PNT’s Rx and environment, e.g., LERE. It is modelled as a normal distribution
, with
being the covariance of the MEO i–LEO l observation noise. This situation is depicted in
Figure 1.
Basic LEO Barrier
A user will collect from the LEO satellites all the MEO-LEO residuals and run one barrier per MEO satellite. Stacking up the equations for each MEO-LEO observation yields
Now this user will run a barrier for the MEO satellite i. Here, a weighted LSQ barrier is taken as a reference:
with
.
The user will perform a check on
(e.g.,
) and decide whether to include or exclude the satellite. The objective of the barrier is to evaluate the covariance involved in the MEO position error estimation process, and the performance of the LEO barrier is measured with the sigma monitor
, which is the projection of the
covariance on the user in direction
:
3.4.2. A Priori LEO Barrier Formulation
A Priori LEO Barrier
The Basic LEO Barrier in Equation (4) requires a large amount of LoS to provide a low-covariance matrix and an accurate estimation of . Usually, this is overcome by using time filtering, and the most popular options are WLSQ with a priori information and the Kalman filter. Since we are aiming for a low TTA, we opt for the WLSQ with a priori information, where the a priori covariance matrix remains constant over time and allows us to better ensure a detectability time.
The state vector
from epoch
t is here renamed as
. At epoch
t, we start with the state vector from the previous epoch
t − 1,
. The a priori covariance matrix of
is
. In this case, it can be demonstrated that
The detectability of the barrier is not compromised significantly as long as the following are true:
3.5. Performance Assessment
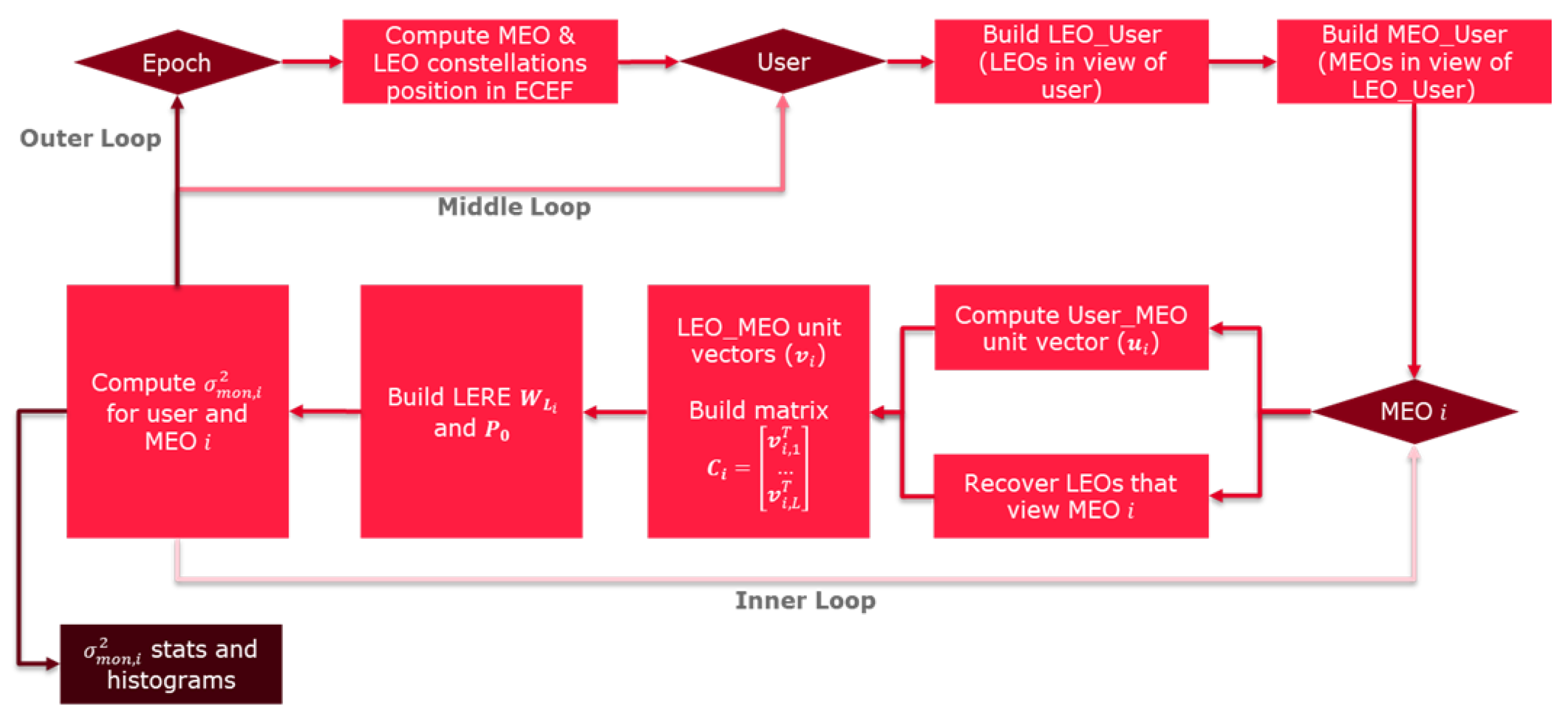
3.5.1. Methodology
A Service Volume Simulator, SVS, has been developed in Python 3.11.6 to analyze the performance of the integrity monitor.
3.5.2. LEO Constellations
In earlier studies, these strategies were analyzed over full LEO constellations containing 200–400 satellites, such as the HIGH_LEO constellation (
Table 5). It would be interesting to evaluate the different algorithms in a less standard constellation, one that can be tested in orbit without spending millions of dollars. For that, the “IoD constellation” has been defined, as shown in
Table 5.
3.5.3. Simulation Results
The following results are from the 1-day SVS simulation run for a 20 × 20 user grid with a time step of 1 h.
Basic LEO Barrier Results
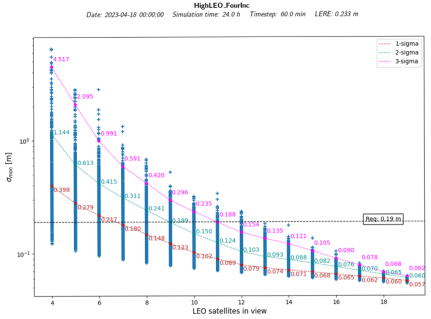
Table 6 shows the comparison of the basic sigma monitor, as a function of the LEOs in view, and the phase LERE budget for both the full constellation and the IoD constellation. The 19 cm target of the sigma monitor is achieved 95% of the time (2-sigma) when there are 9 LEOs or more in view. This geometry distribution depends only on the constellation’s configuration and the analyzed epoch. For a constellation with only four satellites, this approach does not return relevant results, since there are not enough satellites visible to the user to make the barrier work.
A Priori Results
The a priori sigma monitor is simulated here with a diagonal matrix that is 16 times the noise value. The distribution of the sigma monitor across the full constellation in
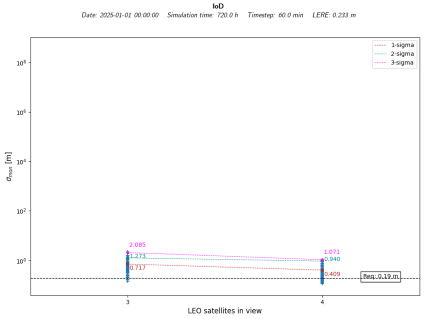
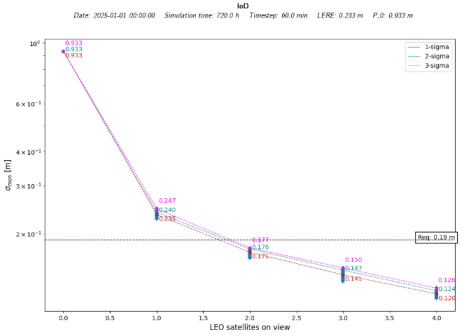
Table 7 shows that the required sigma monitor is always achieved. This is not the case for the IoD constellation; however, the required sigma monitor is achieved with only two satellites in view, so not as many lines of sight are required.
IoD Global Results
In
Table 8, the results obtained from this set of simulations are presented. These simulations last 1 day, with a timestep of 1 h over one relevant user location in the ESTEC (ESA), and use the a priori approach with different noise configurations. The a priori matrix’s diagonal elements vary from 2 to 10 times the noise value. As this case is quite extreme, restrictive conditions must be applied to make the barrier work, but this is possible and allows us to test our strategies using low-budget demonstrators. Note that bold is used to highlight the best case scenario.
4. Conclusions
This paper explores the different options for providing GNSS integrity services when using only an LEO mega-constellation as infrastructure. This study has focused on an automotive user whose integrity FTA has been reused from the Ithaca project. The integrity monitor has been contextualized in this FTA and dimensioned in terms of MDB, Pmd, and Pfa.
The barrier required for the integrity monitor has been identified and formulated in three different manners, considering a basic WLSQ approach with a priori information. The impact of the a priori formulation on the responsiveness of the barrier (and therefore the TTA) has been initially addressed using a simple example. The error budget for the GNSS on board the LEO mega-constellation has also been analyzed.
Based on the results obtained with the simulations run by the SVS, it can be concluded that the targeted sigma monitor of 19 cm, resulting from the MDB, Pfa, and Pmd analyses, is achievable, especially when considering the mega-constellations that are projected, which encourages us to continue improving the concept of integrity by utilizing LEO satellites.
Author Contributions
Conceptualization, C.C.C.; methodology, C.C.C. and L.G.I.; software, L.G.I.; validation, C.C.C. and L.G.I.; formal analysis, C.C.C. and L.G.I.; investigation, C.C.C. and L.G.I.; writing—original draft preparation, C.C.C. and L.G.I.; writing—review and editing, C.C.C. and L.G.I.; supervision, C.C.C. and A.J.M.; project administration, C.C.C. and A.J.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets presented in this article are not readily available because the data are part of an ongoing study.
Conflicts of Interest
The authors declare no conflicts of interest. The authors are employed by GMV.
References
- EU-U.S. Cooperation on Satellite Navigation. Working Group C—ARAIM Technical Subgroup, Milestone 3 Report, Final Version. 2016. Available online: https://www.gps.gov/policy/cooperation/europe/2016/working-group-c/ARAIM-milestone-3-report.pdf (accessed on 15 May 2024).
- González, A.; Martínez, H.S.; Jansen, S.; Wion, A.; Luciano, A. ITHACA Final Report—Project Executive. 2022. Available online: https://defence-industry-space.ec.europa.eu/system/files/2023-04/ITHACA-D030_2_3_FinalReport_ExecutiveProjectSummary.pdf (accessed on 15 May 2024).
- European Global Navigation Satellite Systems Agency. Galileo High Accuracy Service (HAS) Info Note. 2020. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_Info_Note.pdf (accessed on 15 May 2024).
- Montenbruck, O.; Hackel, S.; Wermuth, M.; Zangerl, F. Sentinel-6A precise orbit determination using a combined GPS/Galileo Receiver. J. Geod. 2021, 95, 109. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}