
Configuration Design and Analysis of Tilt-Rotor-Type Flying Car †


Abstract
1. Introduction
2. Overall Design
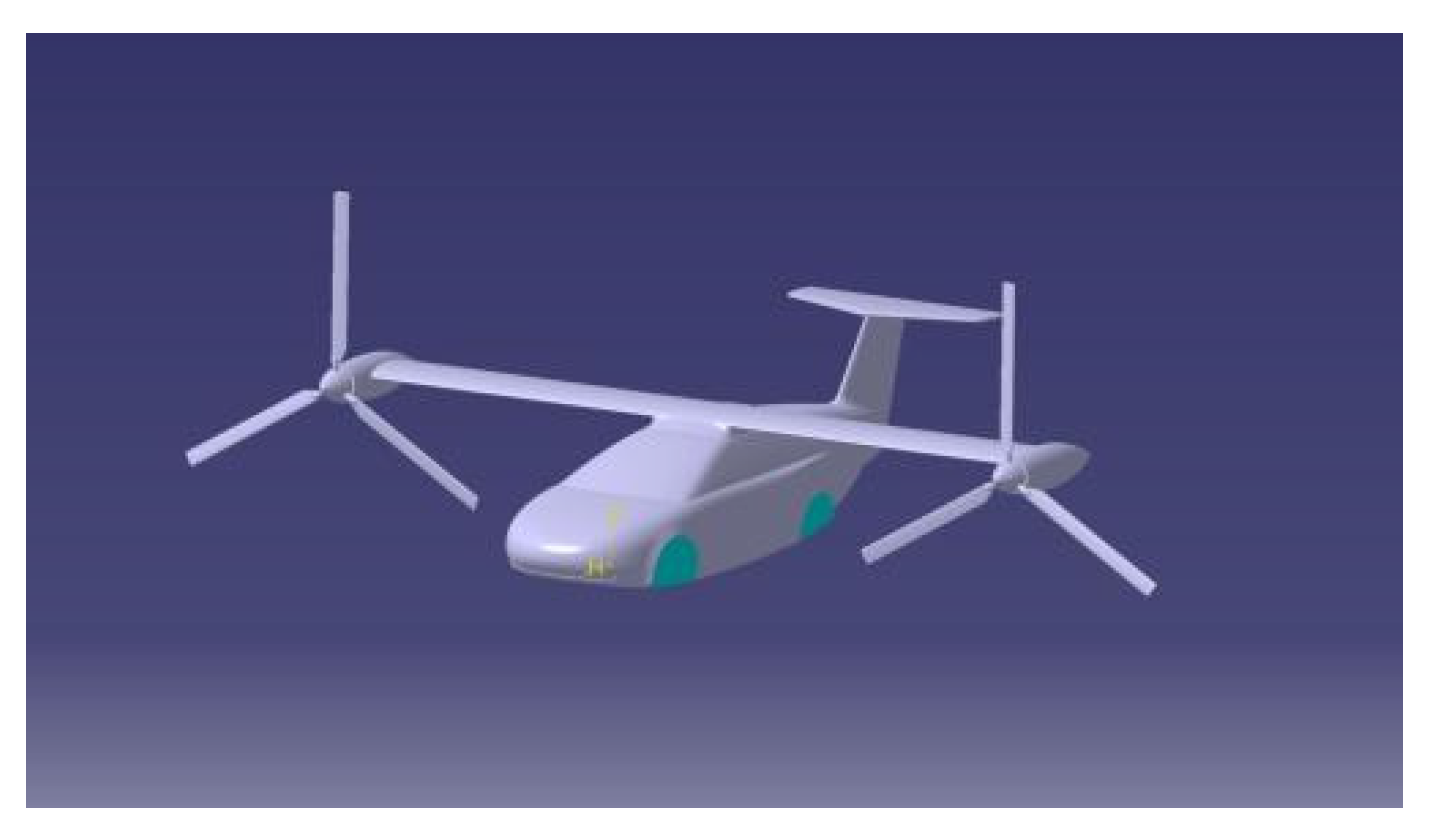
2.1. Overall Configuration Design
2.2. Systematic Literature Review
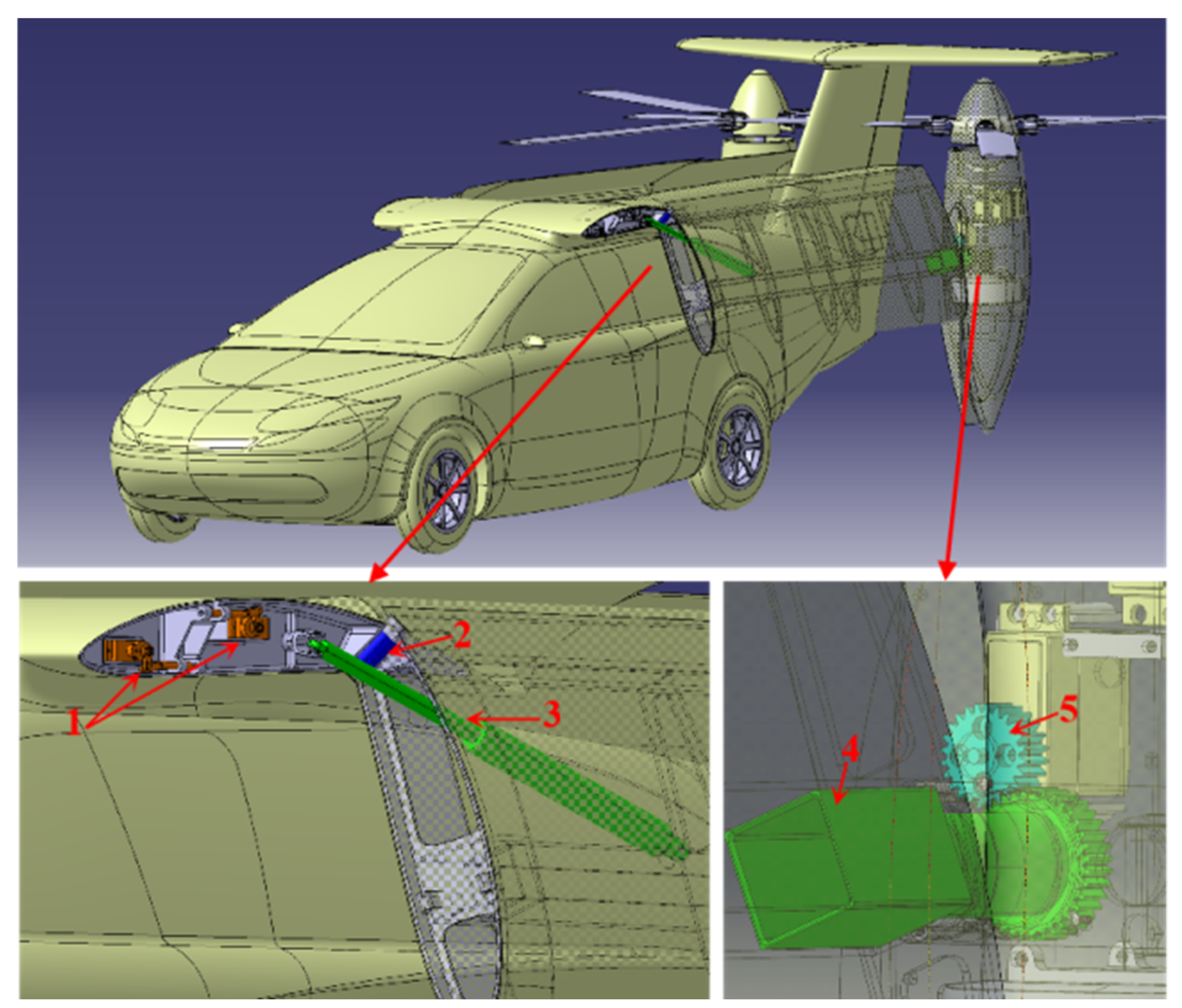
2.2.1. Folding Wing Mechanism
2.2.2. Swiveling Actuator Mechanism
3. Simulation Parameter Settings and Result Analysis
3.1. Flow Field Simulation Settings in Fixed-Wing Flight Mode
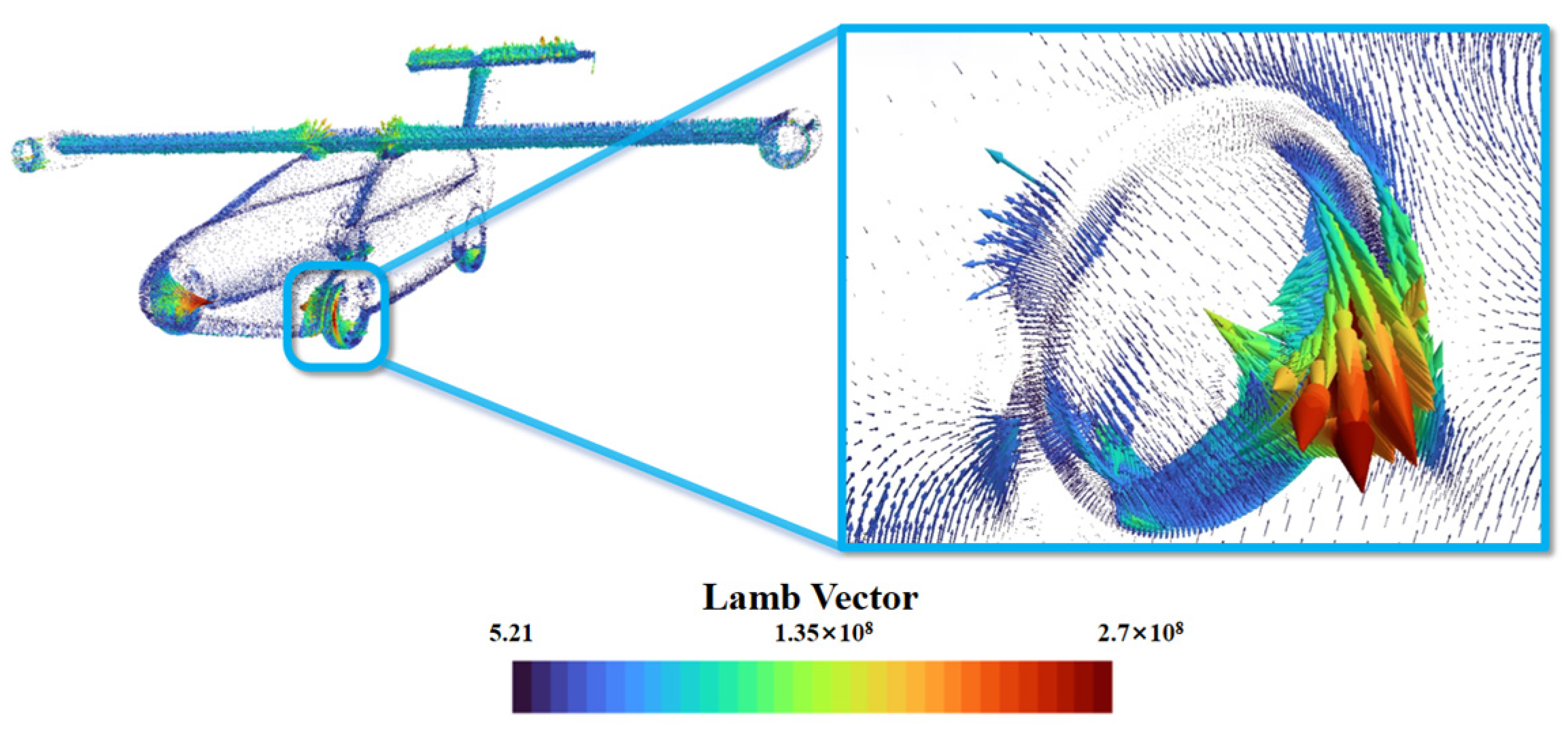
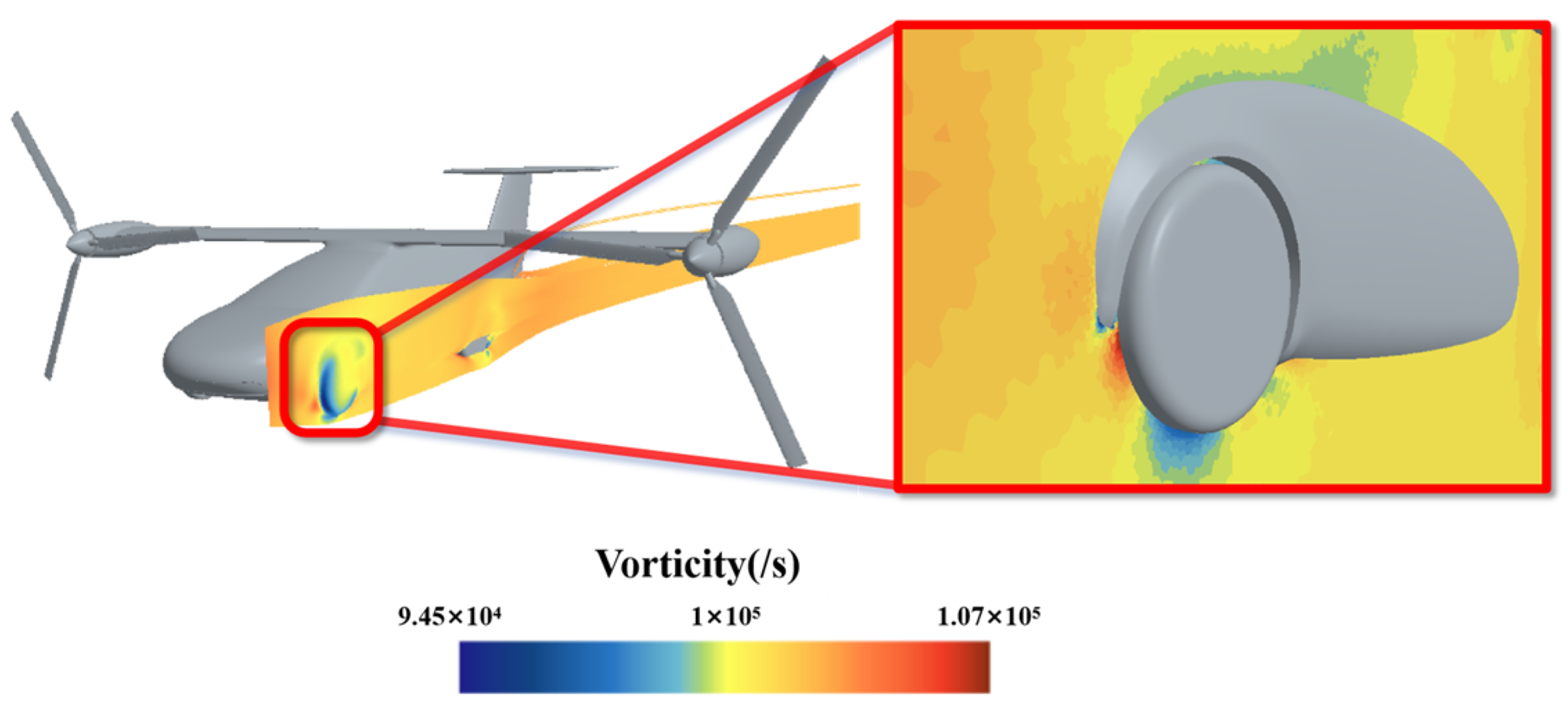
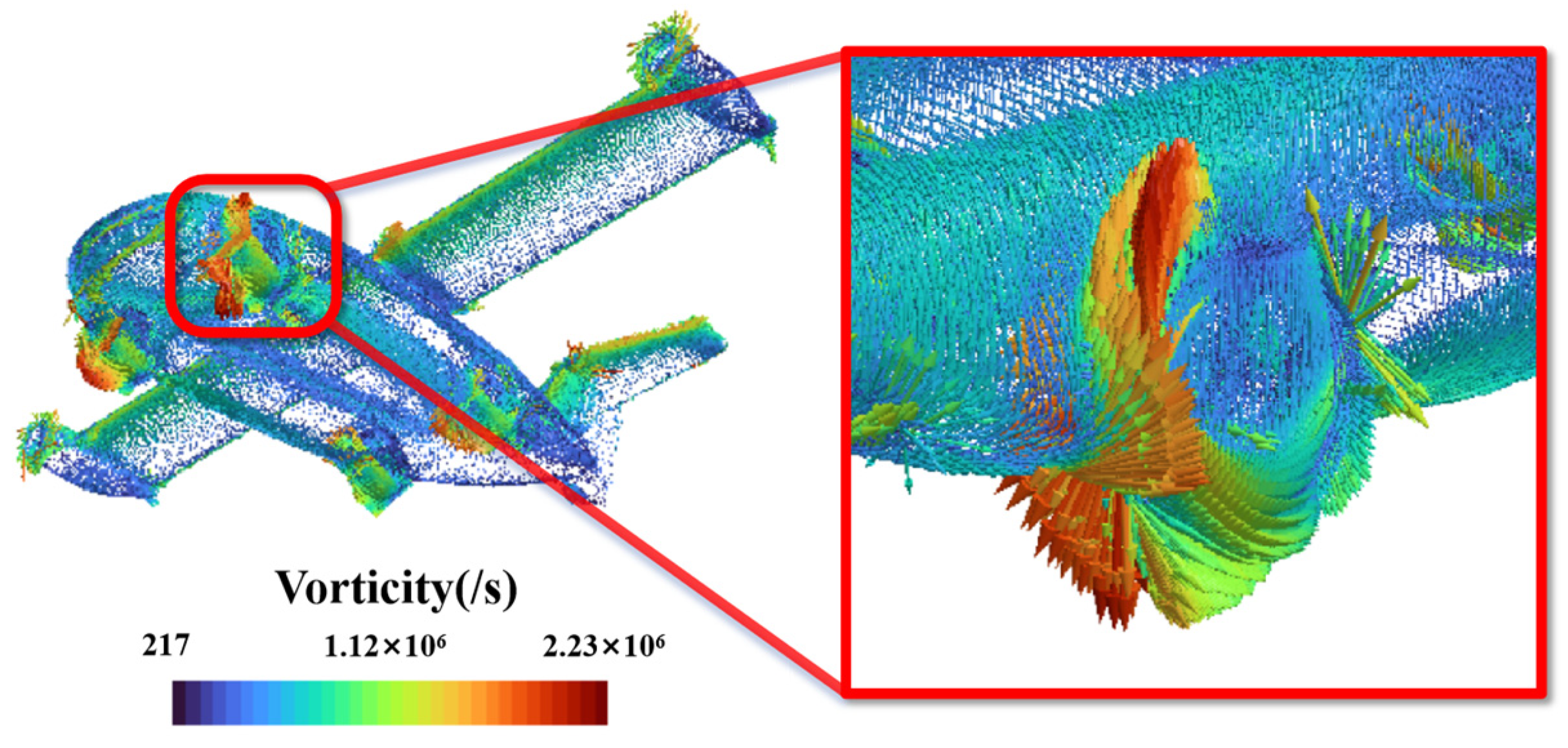
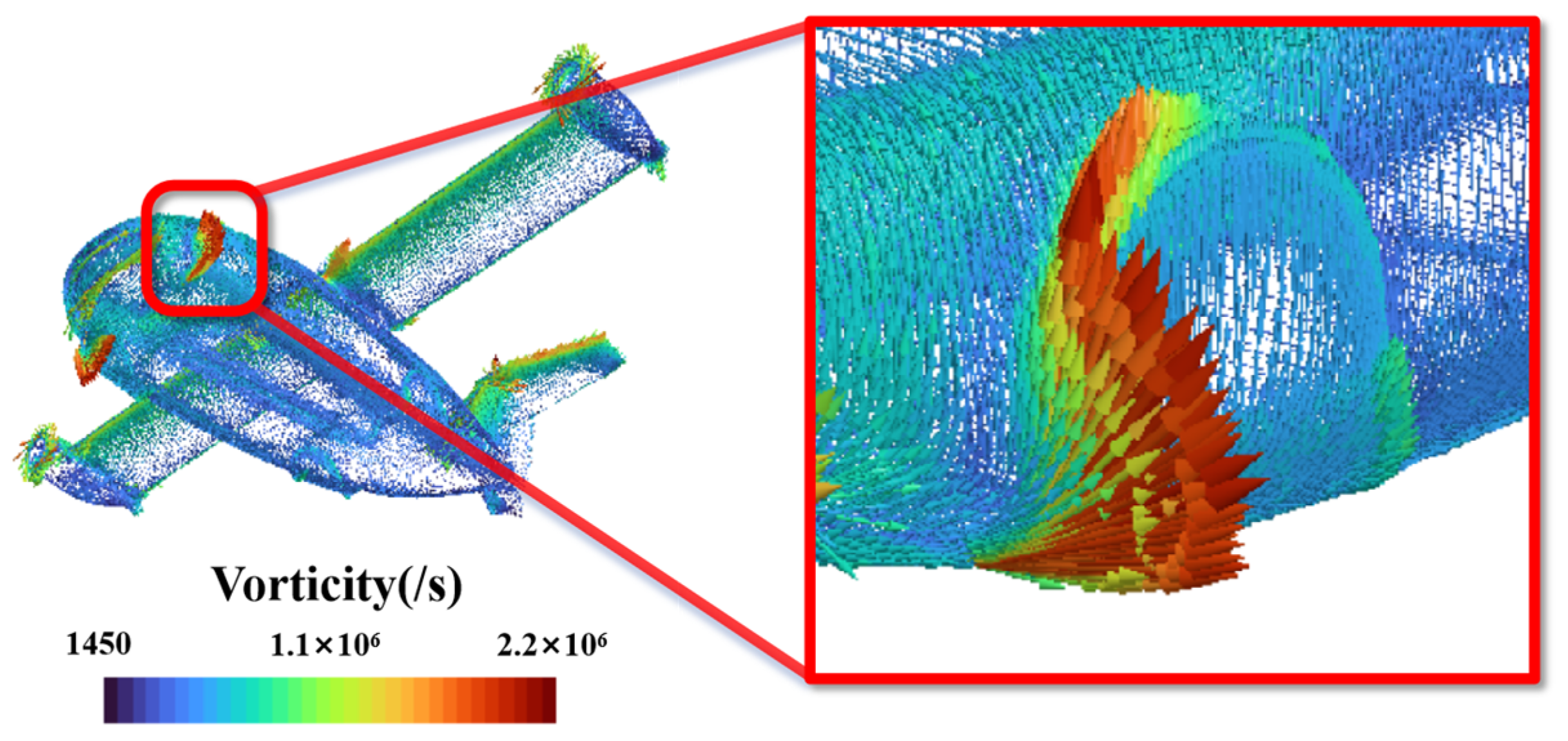
3.2. Flow Field Simulation Result Analysis
4. Design Optimization and Simulation Verification
5. Discussion and Conclusions
- (1)
- (2)
- It is necessary to promote the design of the tilt-rotor blade [11] and the matching of the rotor drive motor’s power parameters for the flying car in future work.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Xu, W.; Shi, Y.; Cai, M.; Li, F. Study on the Effect of Tilting-Rotor Structure on the Lift of Small Tilt Rotor Aircraft (WOS:000426453700068). In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei and Tai’an, China, 27–31 August 2017; pp. 380–385. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, J.; Wang, X. Study of Modeling and Optimal Take-Off Scheme for a Novel Tilt-Rotor UAV. Sensors 2022, 22, 9736. [Google Scholar] [CrossRef] [PubMed]
- Kosmatka, J.; Lake, R. Passive Approach of Controlling Twist in Composite Tilt-Rotor Blades; Chopra, I., Ed.; WOS: A1996BF67T00009; SPIE: Bellingham, WA, USA, 1996; Volume 2717, pp. 146–157. [Google Scholar] [CrossRef]
- Sasongko, R.; Muhammad, B. Modeling and Simulation of Rotor Dynamics of a Tilt-rotor Aircraft (WOS:000516718200015). In Proceedings of the 2017 5th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 6–7 November 2017; pp. 51–56. [Google Scholar] [CrossRef]
- Pardede, W.M.; Adhitya, M. Take off and landing performance analysis for a flying car model using wind tunnel test method. AIP Conf. Proc. 2020, 2227, 020030. [Google Scholar] [CrossRef]
- Ai, T.; Xu, B.; Xiang, C.; Fan, W.; Zhang, Y. Modeling and Multimode Analysis of Electrically Driven Flying Car (WOS:000612041300200). In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1565–1571. [Google Scholar] [CrossRef]
- Shamiyeh, M.; Bijewitz, J.; Hornung, M. A review of recent personal air vehicle concepts. In Proceedings of the Aerospace Europe 6th CEAS Conference, Bucharest, Romania, 16–20 October 2017; Volume 913, pp. 1–18. [Google Scholar] [CrossRef]
- Zhang, T.; Barakos, G.N.; Furqan; Foster, M. High-fidelity aerodynamic and acoustic design and analysis of a heavy-lift eVTOL. Aerosp. Sci. Technol. 2023, 137, 108307. [Google Scholar] [CrossRef]
- Kim, K.; Hwang, K.; Kim, H. Study of an adaptive fuzzy algorithm to control a rectangular-shaped unmanned surveillance flying car. J. Mech. Sci. Technol. 2013, 27, 2477–2486. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Y.; Zheng, Y. Overall eVTOL aircraft design for urban air mobility. Green Energy Intell. Transp. 2024, 3, 100150. [Google Scholar] [CrossRef]
- Abà, A.; Barra, F.; Capone, P.; Guglieri, G. Mathematical Modelling of Gimballed Tilt-Rotors for Real-Time Flight Simulation. Aerospace 2020, 7, 124. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wingspan | 8.98 m |
| Width (folded) | 1.89 m |
| Maximum flight speed | 300 km/h |
| Maximum ground speed | 150 km/h |
| Flight endurance time | 1 h |
| Payload | 180 kg |
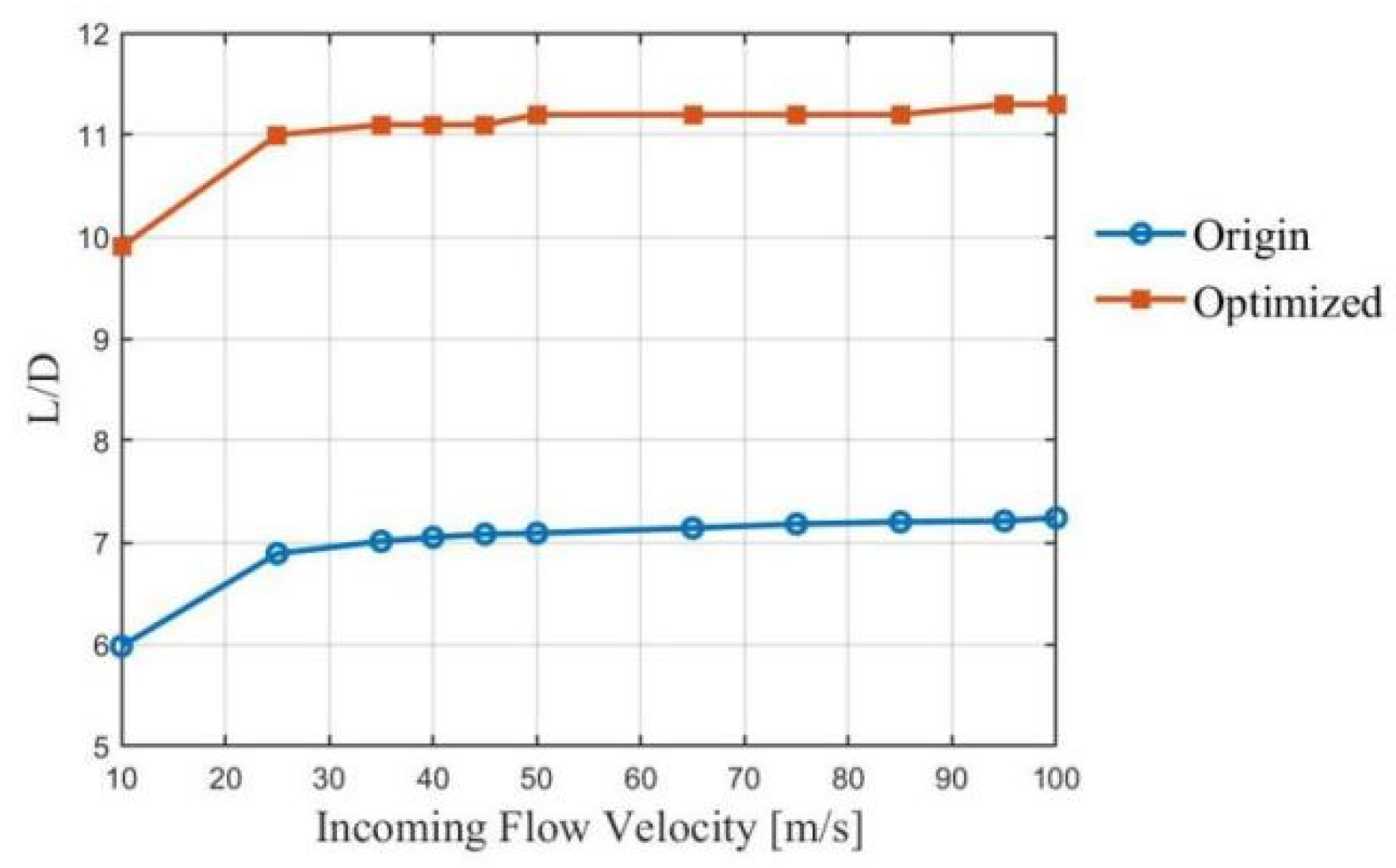
| Incoming Flow Velocity (m/s) | Lift (N) | Drag (N) | L/D |
|---|---|---|---|
| 10 | 26.9 | 4.5 | 5.98 |
| 25 | 180.6 | 26.2 | 6.89 |
| 35 | 356.9 | 50.9 | 7.01 |
| 40 | 467.7 | 66.3 | 7.05 |
| 45 | 592.4 | 83.7 | 7.08 |
| 50 | 732.9 | 103.3 | 7.09 |
| 65 | 1242.7 | 174.1 | 7.14 |
| 75 | 1657 | 230.9 | 7.18 |
| 85 | 2132.6 | 296 | 7.20 |
| 95 | 2667.9 | 370.2 | 7.21 |
| 100 | 2958 | 408.8 | 7.24 |
| Incoming Flow Velocity (m/s) | Lift(N) | Drag(N) | L/D |
|---|---|---|---|
| 10 | 27.5 | 2.8 | 9.9 |
| 25 | 183.0 | 16.7 | 11.0 |
| 35 | 361.5 | 32.5 | 11.1 |
| 40 | 472.5 | 42.4 | 11.1 |
| 45 | 598.5 | 53.7 | 11.1 |
| 50 | 739.7 | 66.2 | 11.2 |
| 65 | 1252.5 | 112.0 | 11.2 |
| 75 | 1669.5 | 149.0 | 11.2 |
| 85 | 2146.4 | 191.0 | 11.2 |
| 95 | 2685.4 | 238.7 | 11.3 |
| 100 | 2977.0 | 264.3 | 11.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Tian, Z.; Li, A.; Xiong, M.; Wang, Y.; Chen, F.; Yang, S. Configuration Design and Analysis of Tilt-Rotor-Type Flying Car. Eng. Proc. 2024, 80, 33. https://doi.org/10.3390/engproc2024080033
Chen C, Tian Z, Li A, Xiong M, Wang Y, Chen F, Yang S. Configuration Design and Analysis of Tilt-Rotor-Type Flying Car. Engineering Proceedings. 2024; 80(1):33. https://doi.org/10.3390/engproc2024080033
Chicago/Turabian StyleChen, Changlong, Zhiming Tian, Aojie Li, Mengyu Xiong, Yuanshuo Wang, Fei Chen, and Shichun Yang. 2024. "Configuration Design and Analysis of Tilt-Rotor-Type Flying Car" Engineering Proceedings 80, no. 1: 33. https://doi.org/10.3390/engproc2024080033
APA StyleChen, C., Tian, Z., Li, A., Xiong, M., Wang, Y., Chen, F., & Yang, S. (2024). Configuration Design and Analysis of Tilt-Rotor-Type Flying Car. Engineering Proceedings, 80(1), 33. https://doi.org/10.3390/engproc2024080033