
Co-Simulation and Platform Design of Airfoil Actuator Performance †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Establishment of Joint Simulation Model of Airfoil Actuator
2.1. Mathematical Model of Parametric Airfoil Actuator
2.1.1. BLDC Motor
2.1.2. Hydraulic Pump
2.1.3. Hydraulic Jack
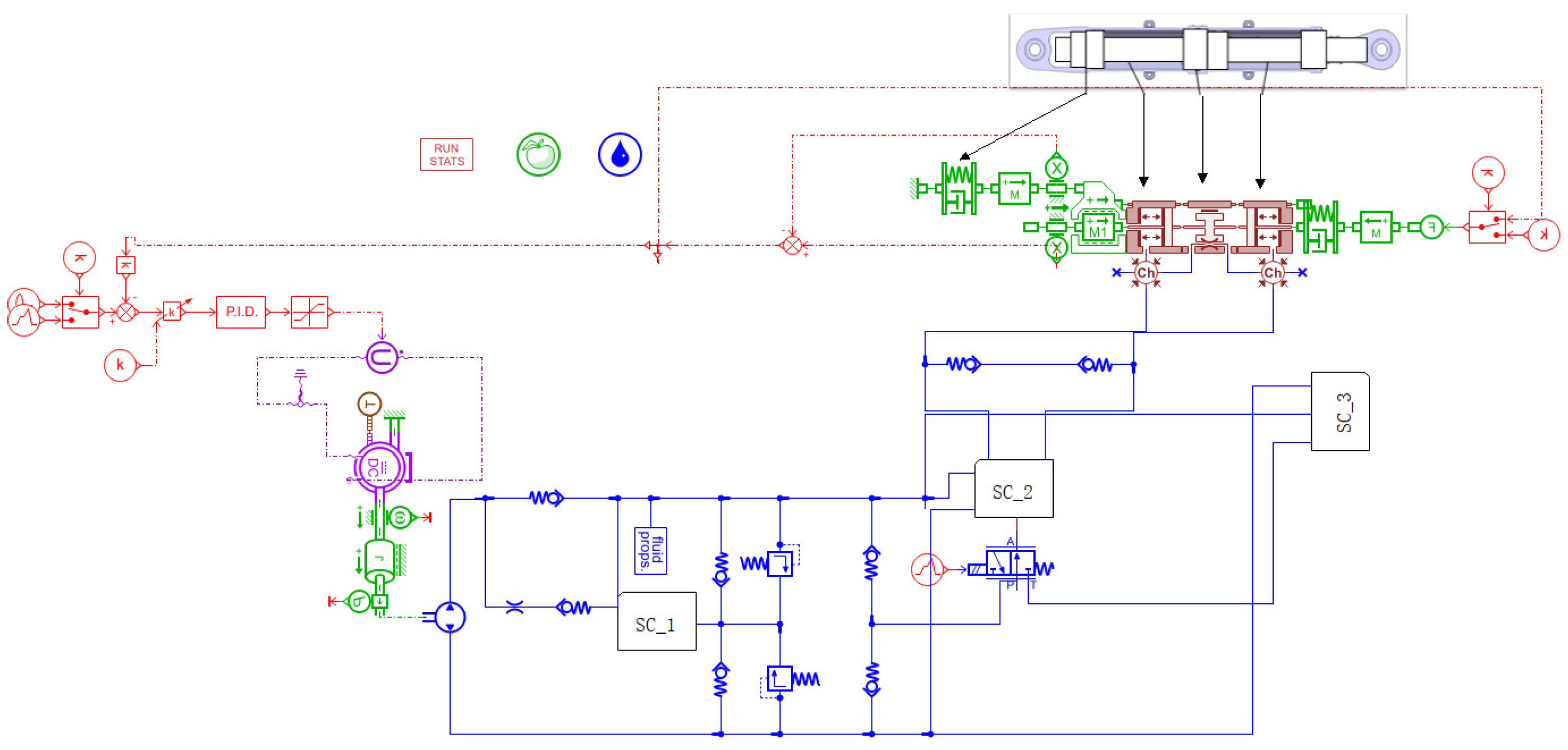
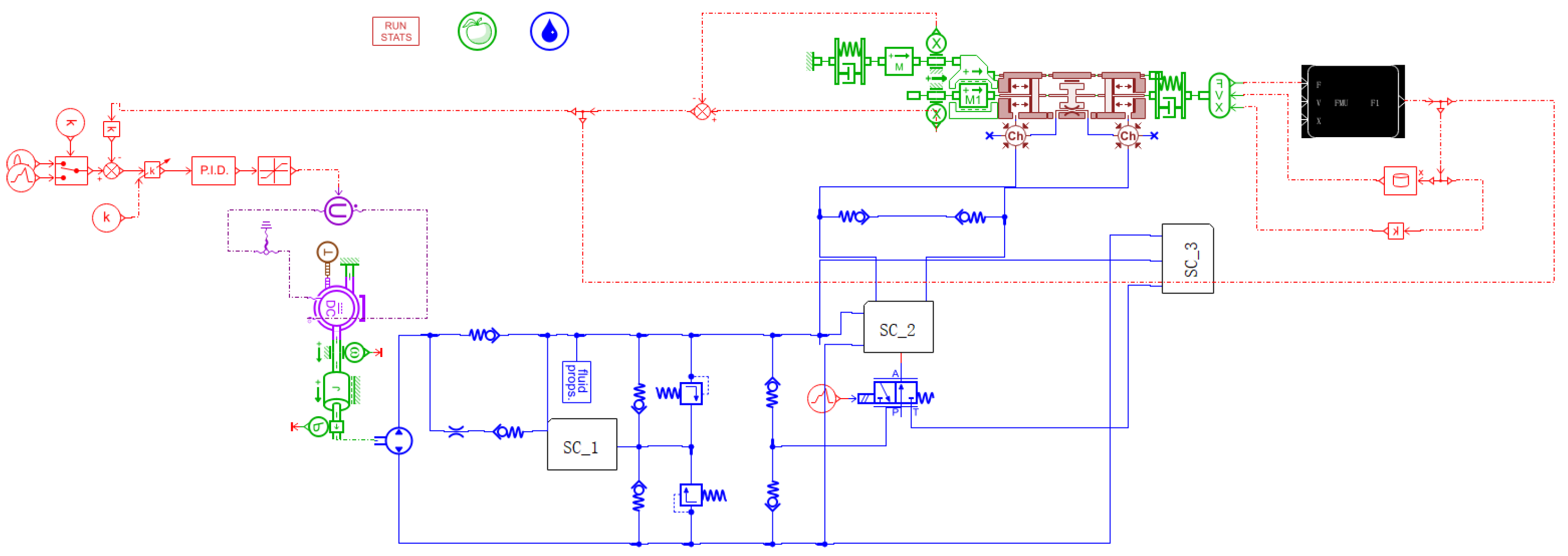
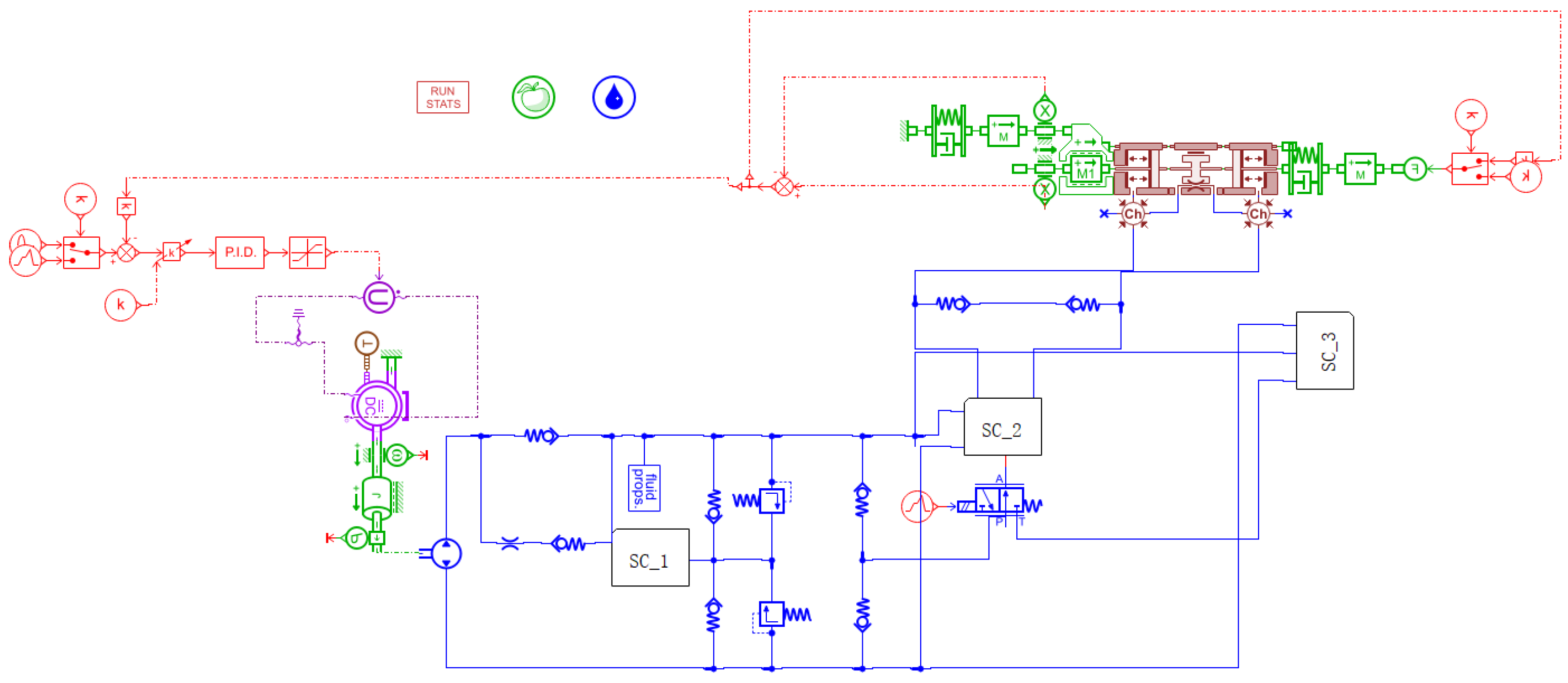
2.2. Establishment of Hydraulic Model of Airfoil Actuator
3. Actuator Co-Simulation Analysis
3.1. Actuator Co-Simulation
3.2. Analysis of Simulation Result
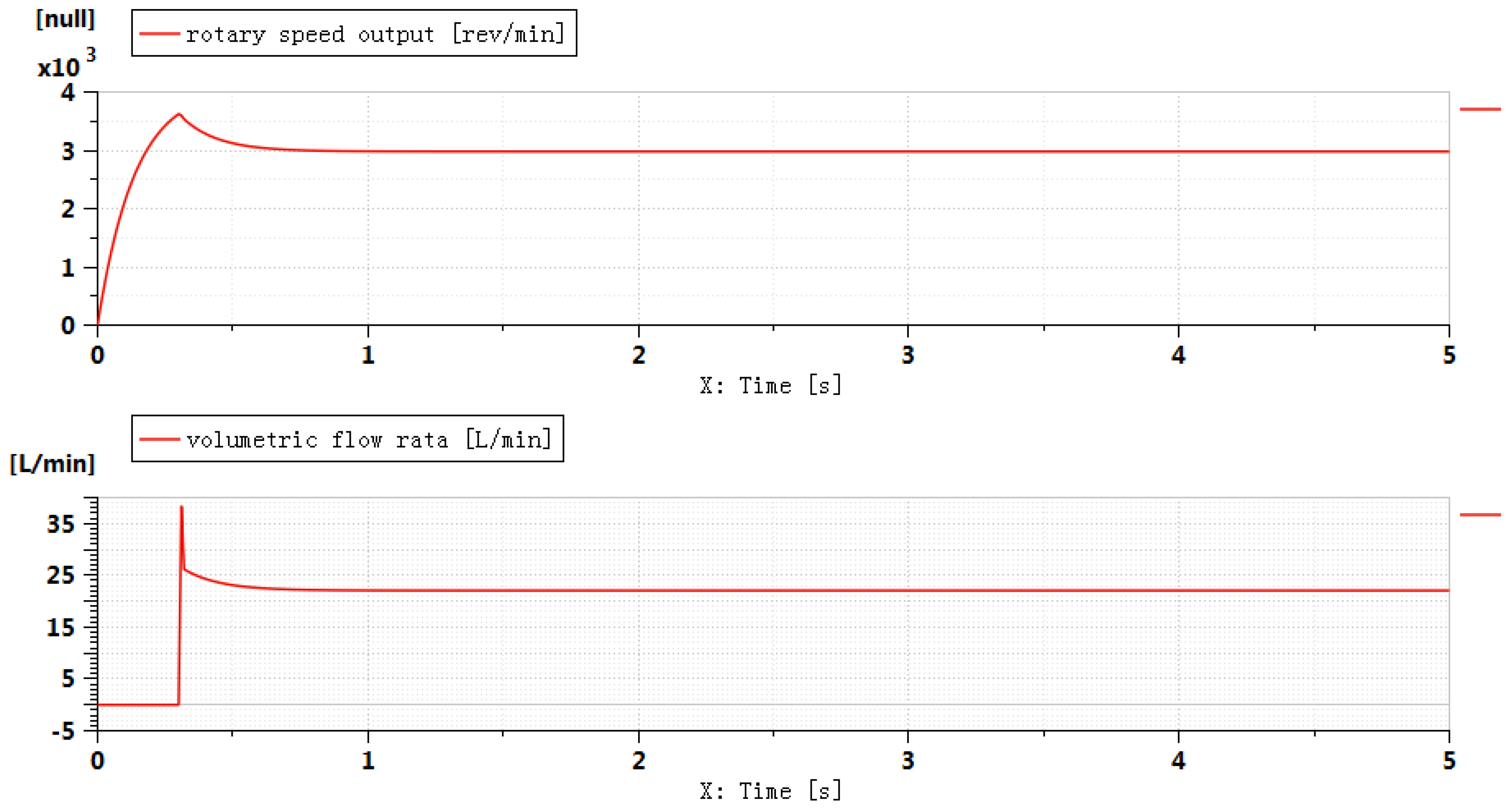
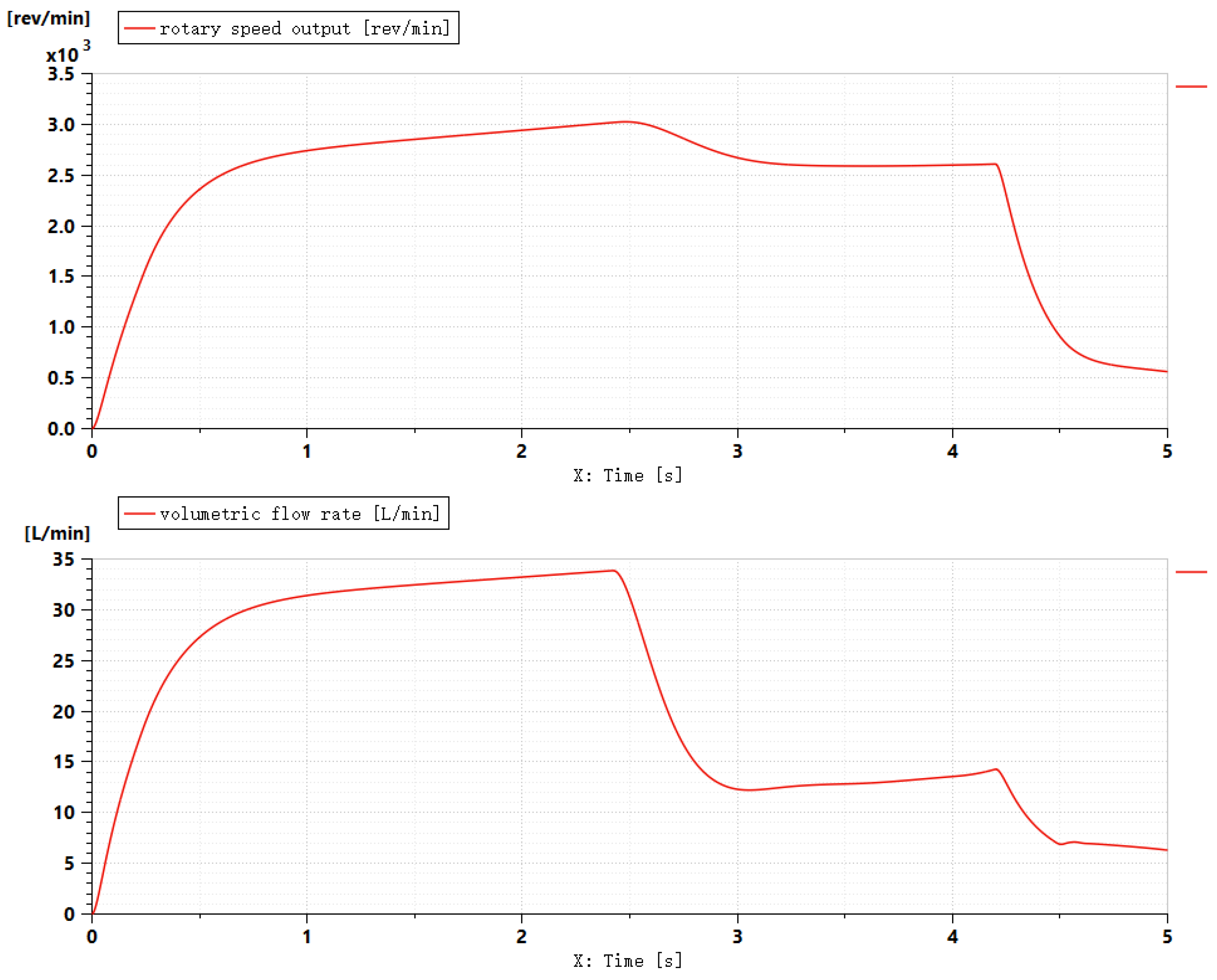
3.2.1. Single Simulation Result
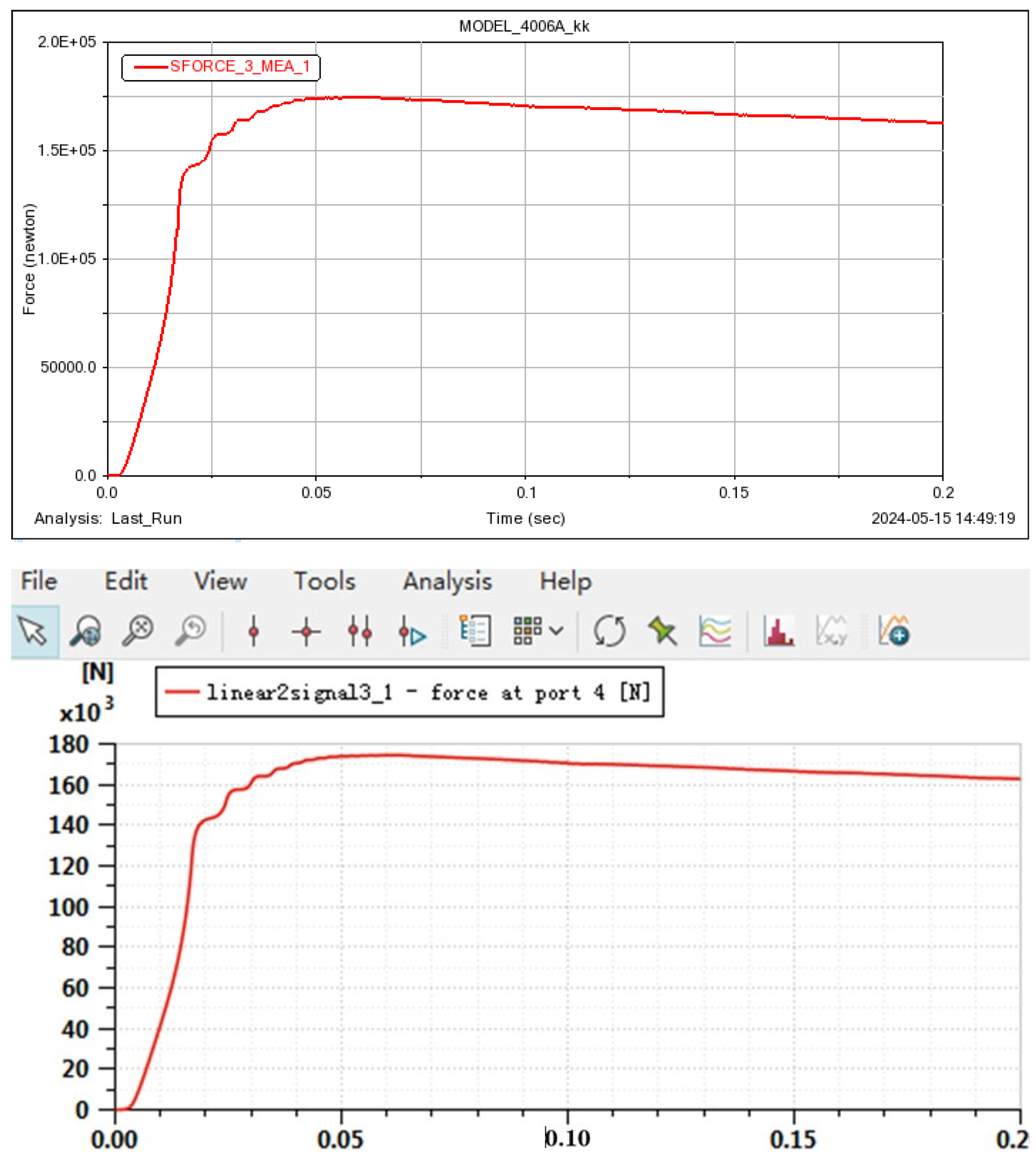
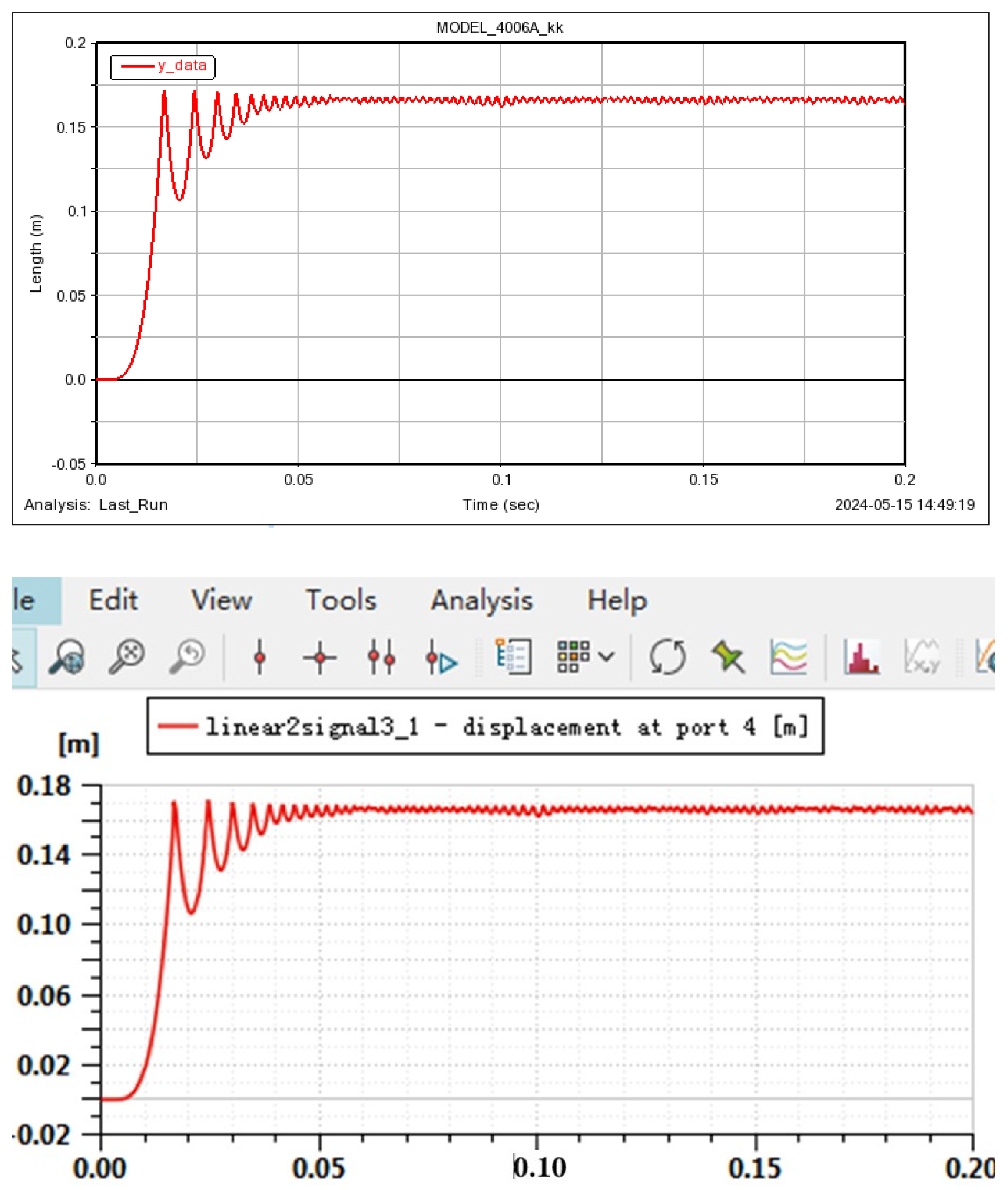
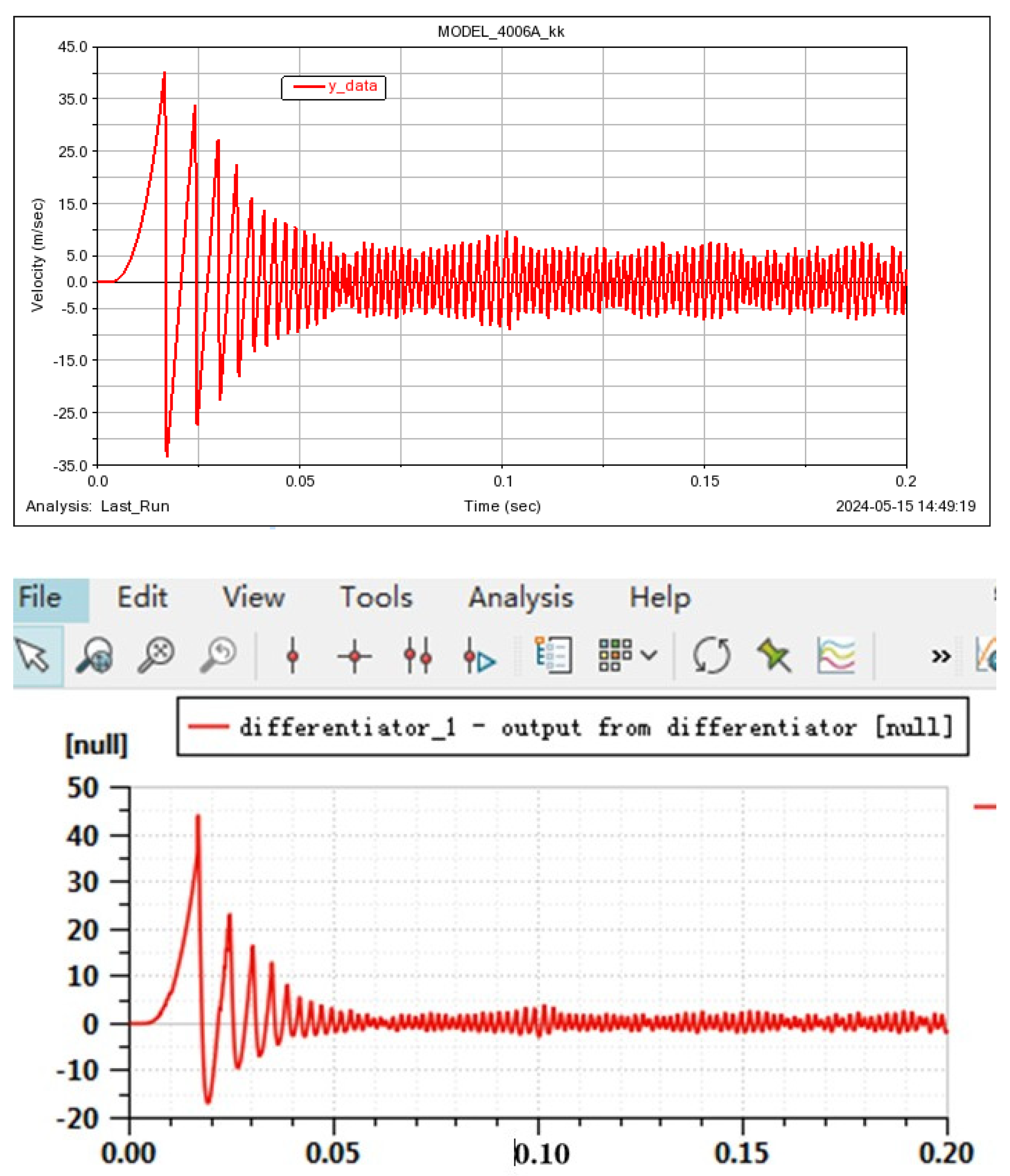
3.2.2. Co-Simulation Result
3.3. Software Design
4. Summary
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiao, Y.; Wang, F.; Sun, P. Numerical simulation of two-dimensional plain flap ground effect based on NACA4412 airfoil. J. Phys. Conf. Ser. 2024, 2756, 012049. [Google Scholar] [CrossRef]
- Wang, C.; Lin, W.; Lin, X.; Wu, T.; Meng, Z.; Cai, A.; Xu, Z.; Li, Y.; Feng, F. The Influence of Angle of Attack on the Icing Distribution Characteristics of DU97 Blade Airfoil Surface for Wind Turbines. Coatings 2024, 14, 160. [Google Scholar] [CrossRef]
- Ying, R.Z.; Xin, W. Research on Power Adaptive Control Method for Hydraulic Motor Grader Based on Simulink/AMESim. Appl. Mech. Mater. 2011, 135–136, 793–799. [Google Scholar]
- Wu, H. Simulation Analysis of Hydraulic Control System of Engineering Robot Arm Based on ADAMS. Int. J. Adv. Comput. Sci. Appl. (IJACSA) 2023, 14, 414–420. [Google Scholar] [CrossRef]
- Hong, H.; Decheng, S.; Yu, X.; Runguo, W.; Yonglai, L.; Fanzhu, L. Process optimization of co-simulation of rolling temperature rise and injection molding for non-pneumatic tires. Int. Commun. Heat Mass Transf. 2024, 157, 107783. [Google Scholar] [CrossRef]
- Tokarczyk, J.; Kowol, D.; Szewerda, K.; Matusiak, P. Virtual Prototyping of Bulk Material Preparation Devices in Mining Using Multiphysics Simulations. Appl. Sci. 2024, 14, 5903. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M. Co-Simulation and Platform Design of Airfoil Actuator Performance. Eng. Proc. 2024, 80, 23. https://doi.org/10.3390/engproc2024080023
Liu M. Co-Simulation and Platform Design of Airfoil Actuator Performance. Engineering Proceedings. 2024; 80(1):23. https://doi.org/10.3390/engproc2024080023
Chicago/Turabian StyleLiu, Mengyi. 2024. "Co-Simulation and Platform Design of Airfoil Actuator Performance" Engineering Proceedings 80, no. 1: 23. https://doi.org/10.3390/engproc2024080023
APA StyleLiu, M. (2024). Co-Simulation and Platform Design of Airfoil Actuator Performance. Engineering Proceedings, 80(1), 23. https://doi.org/10.3390/engproc2024080023