
On the Family of Covariance Functions Based on ARMA Models †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction and Related Work
2. The Family of Non-Repeated Poles ARMA Models
Positive Definiteness in Higher Dimensions
3. Generalization to Repeated Poles ARMA Models
3.1. The Half-Integer Matérn Covariance Function
3.2. Repeated Poles ARMA Models
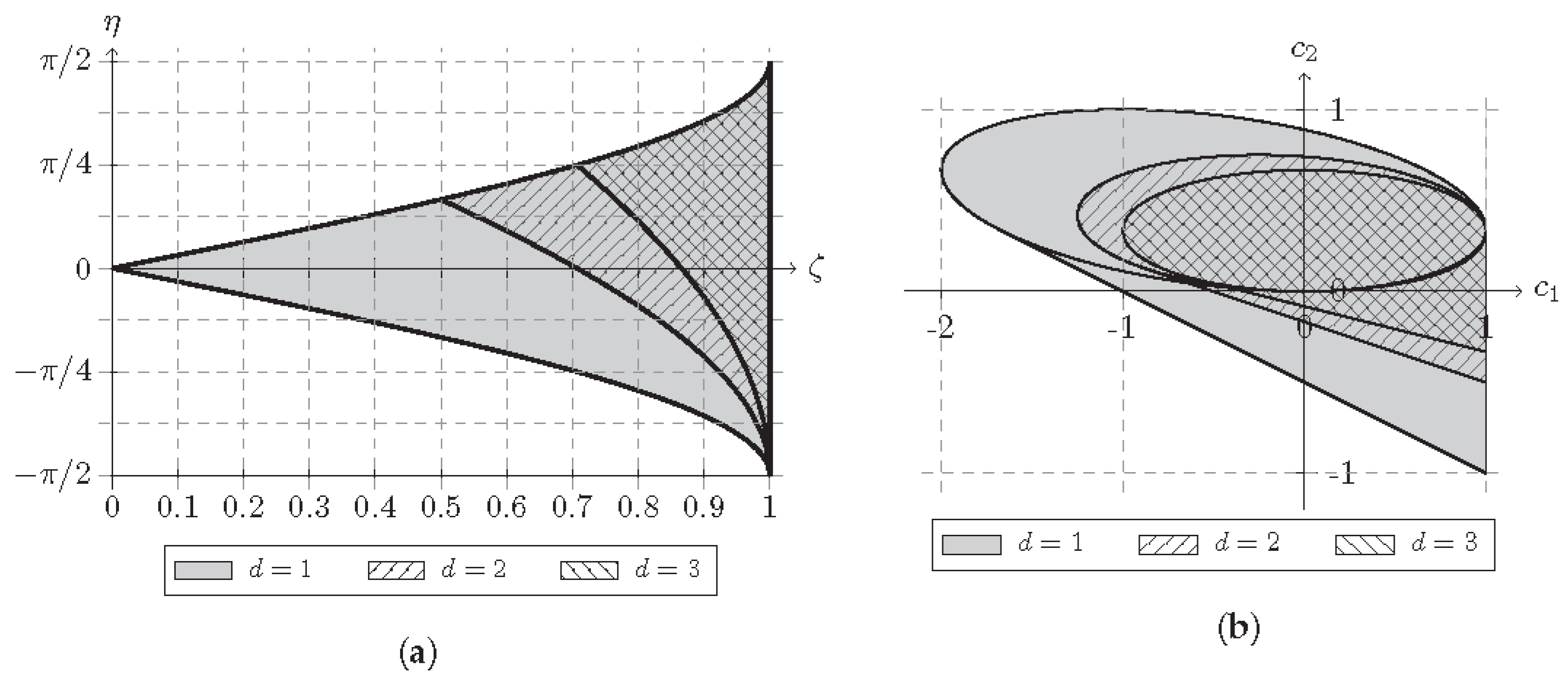
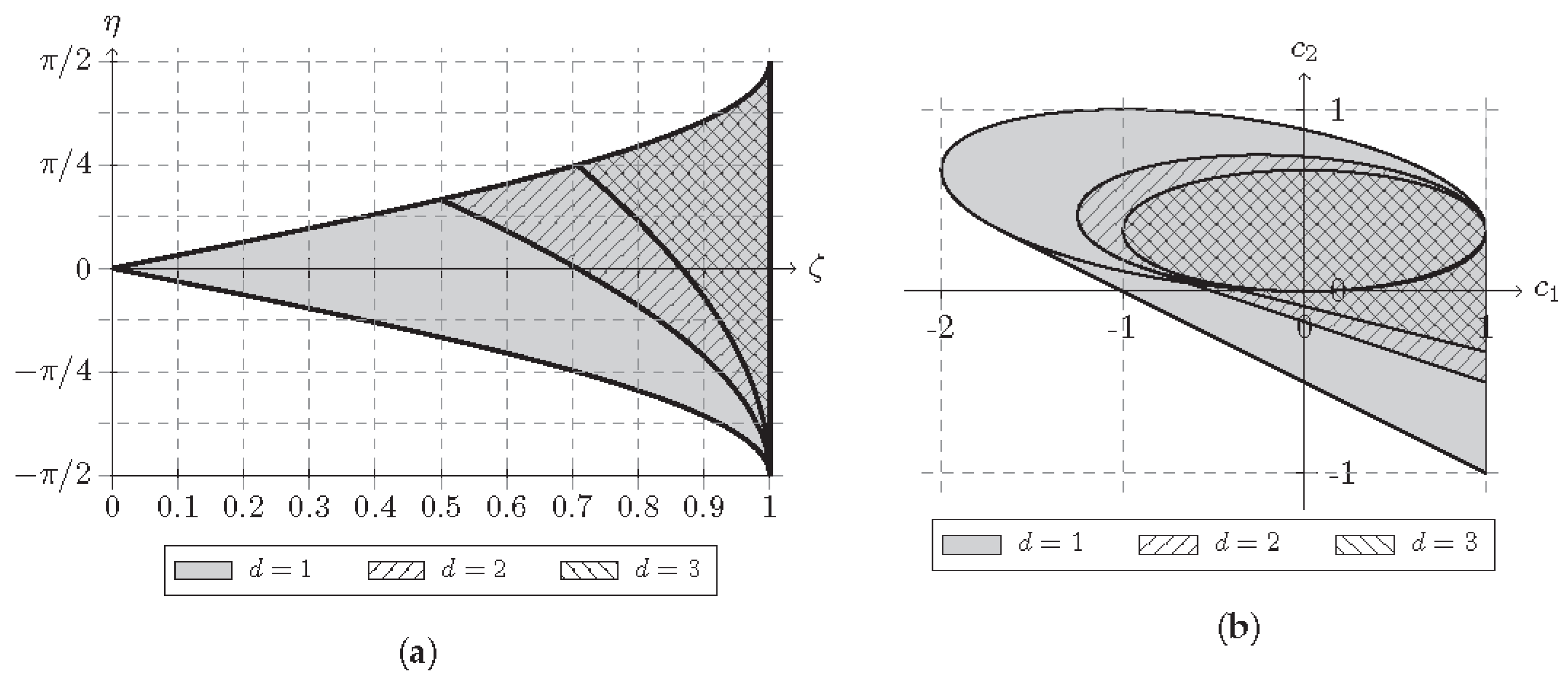
3.3. Bounds for the Polynomial Coefficients of Markov Models
3.4. Oscillatory Repeated Poles ARMA Models
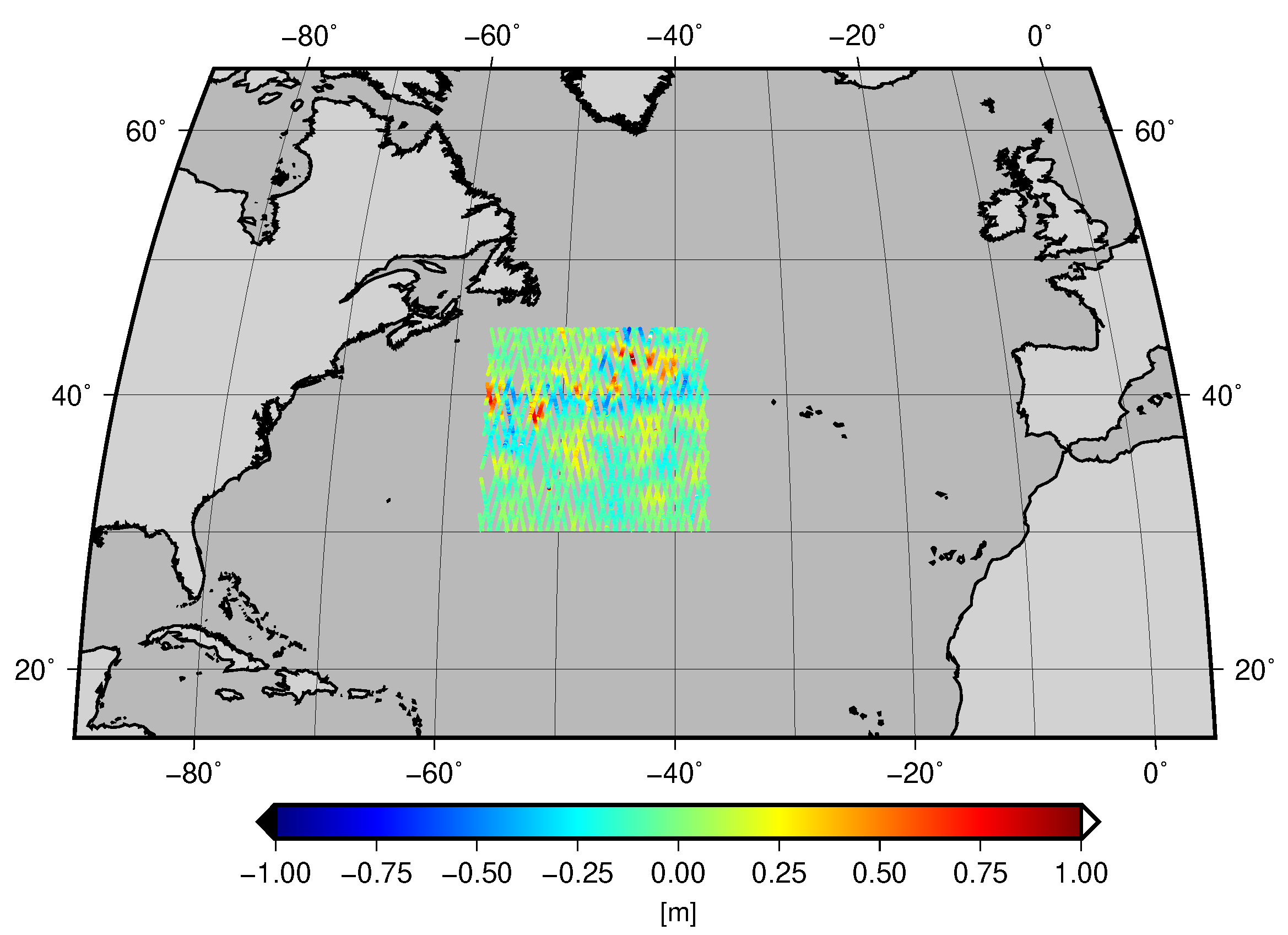
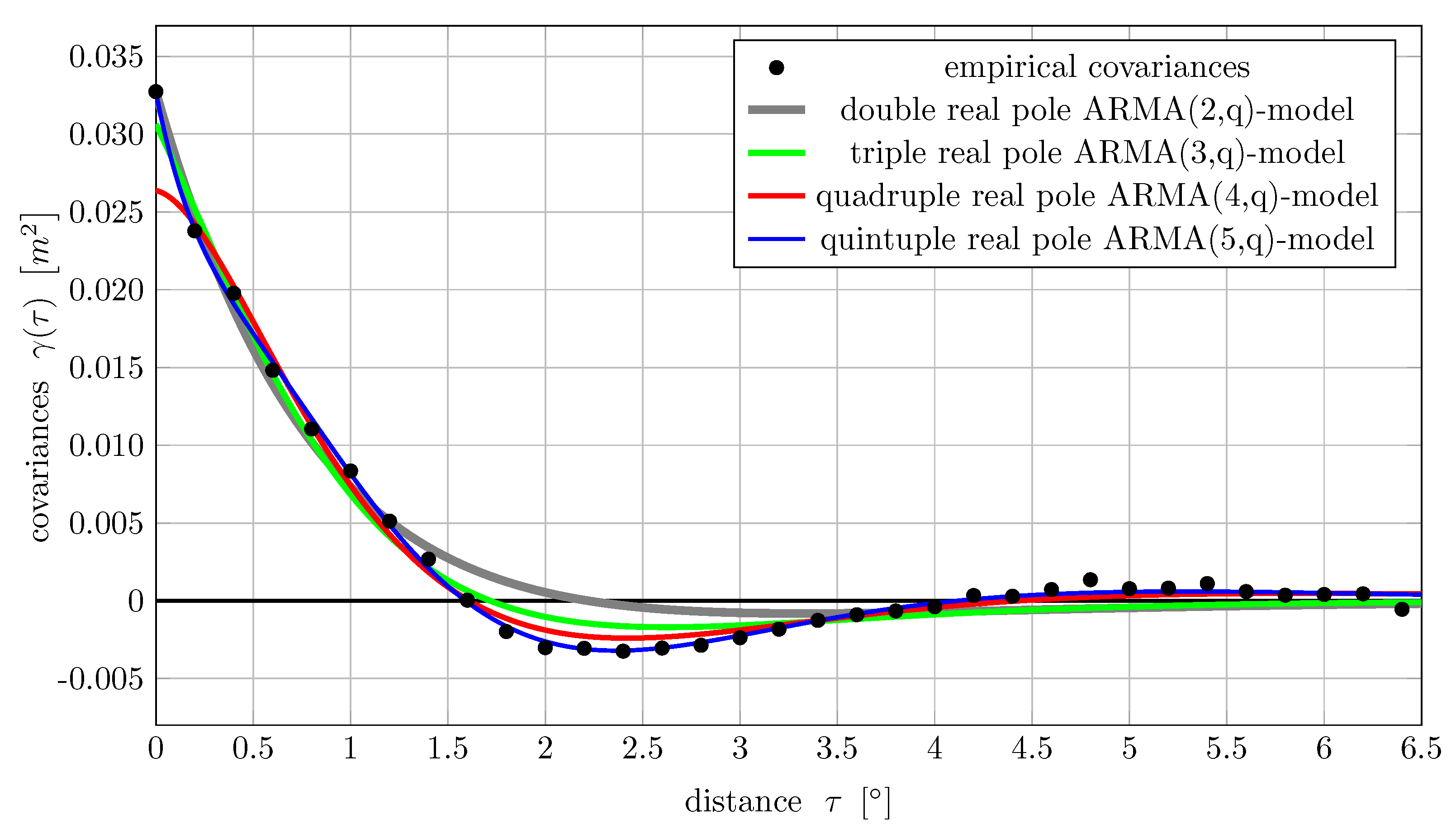
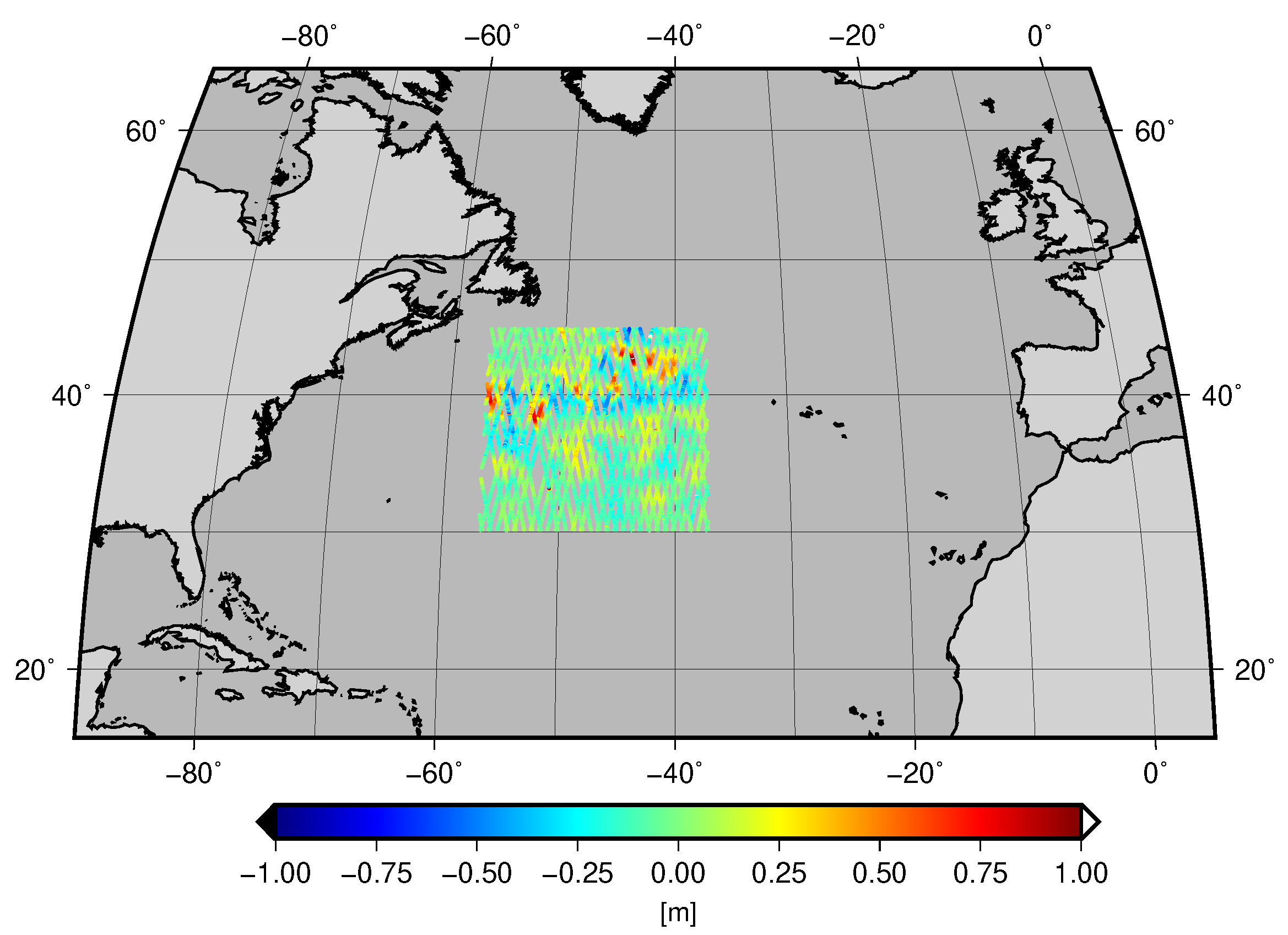
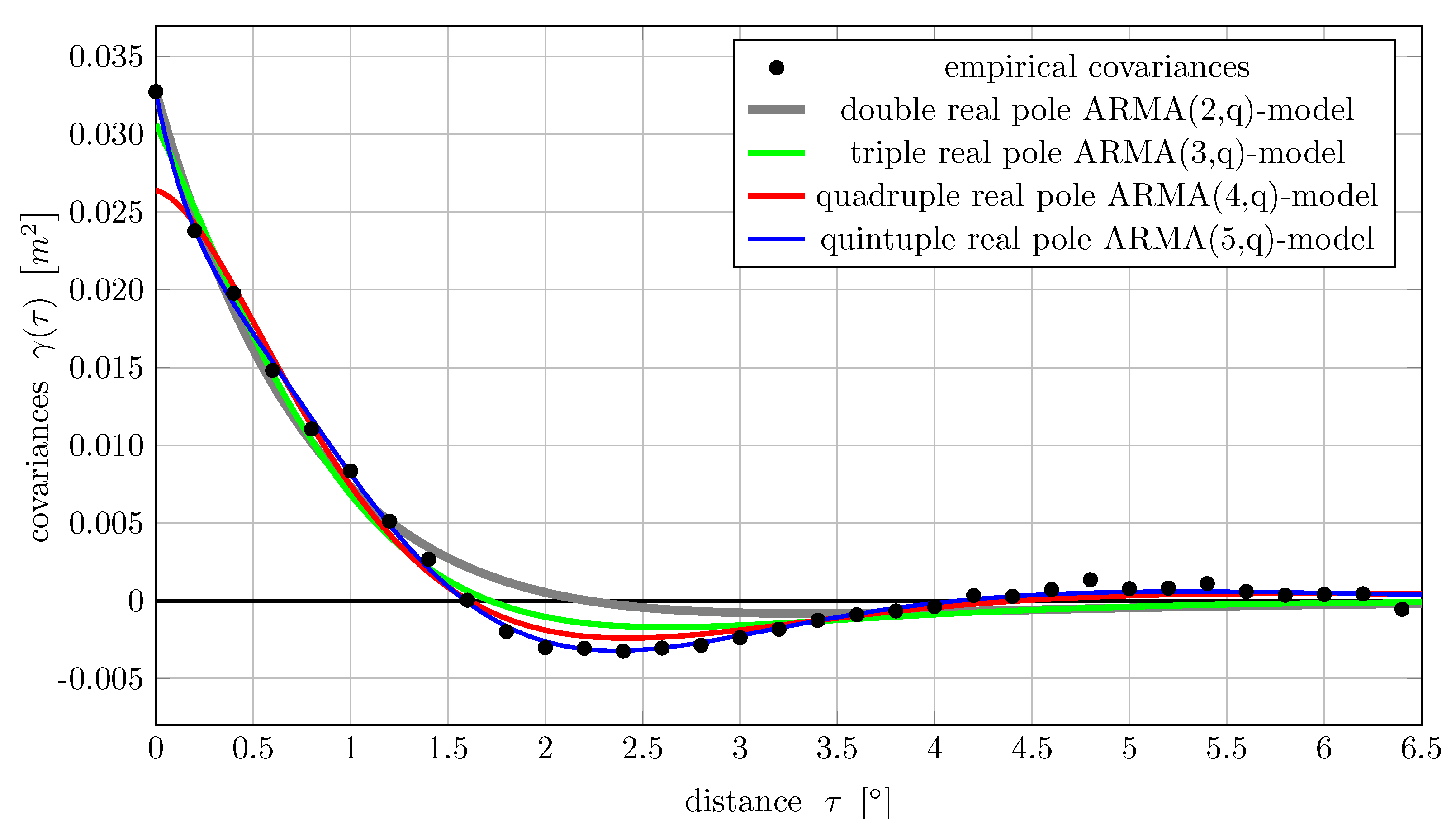
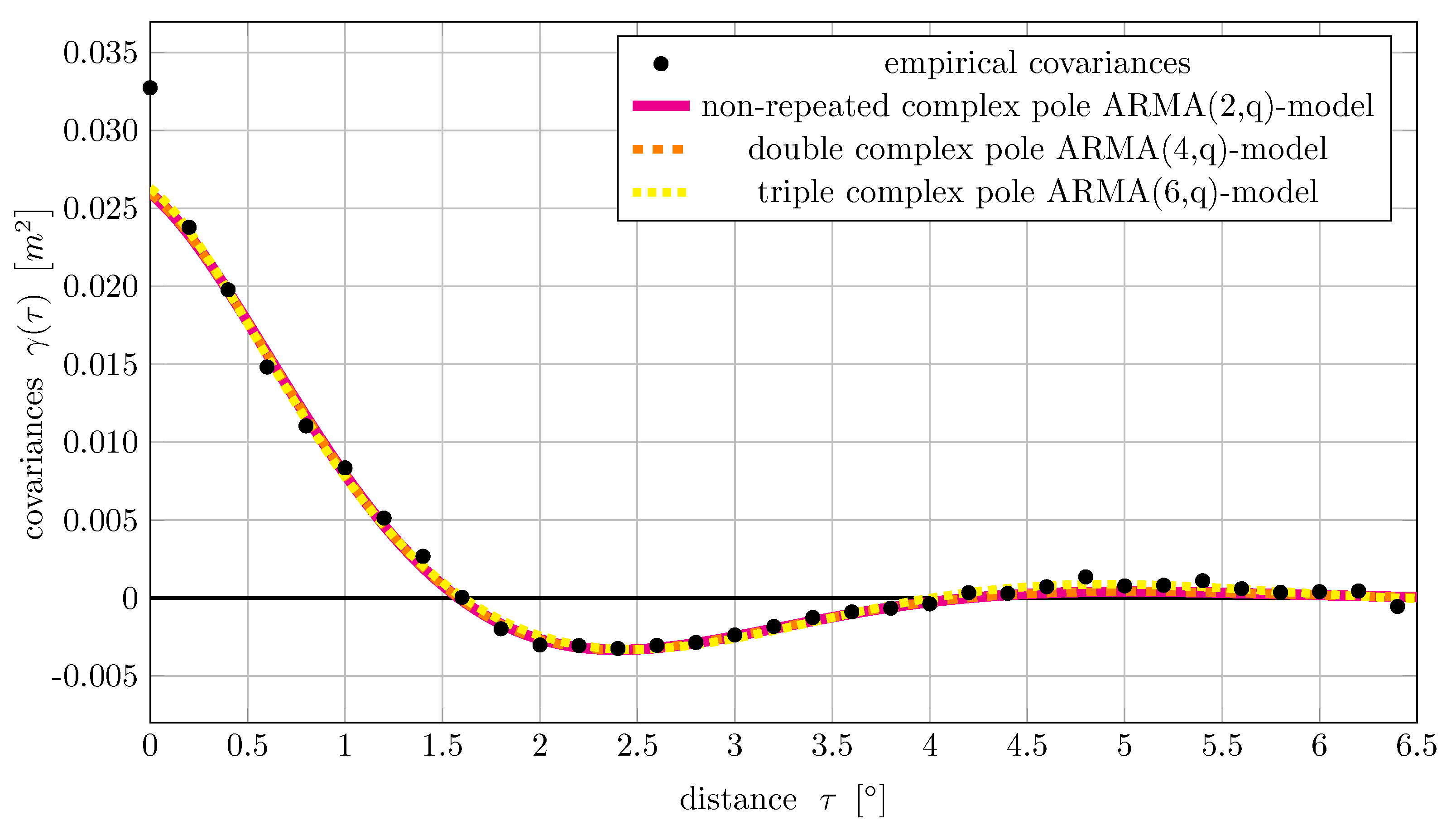
4. Application to Altimetry Data: A Demonstration
5. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AR | Autoregressive |
| ARMA | Autoregressive moving average |
| MA | Moving average |
| SOGM | Second-order Gauss–Markov |
| SLA | Sea level anomalies |
References
- Moritz, H. Covariance Functions in Least-Squares Collocation; Number 240 in Reports of the Department of Geodetic Science; Ohio State University: Columbus, OH, USA, 1976. [Google Scholar]
- Journel, A.G.; Froidevaux, R. Anisotropic Hole-Effect Modeling. J. Int. Assoc. Math. Geol. 1982, 14, 217–239. [Google Scholar] [CrossRef]
- Matérn, B. Spatial Variation: Stochastic Models and Their Application to Some Problems in Forest Surveys and Other Sampling Investigations. Ph.D. Thesis, University of Stockholm, Stockholm, Sweden, 1960. [Google Scholar] [CrossRef]
- Rasmussen, C.; Williams, C. Gaussian Processes for Machine Learning; Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Buell, C.E. Correlation Functions for Wind and Geopotential on Isobaric Surfaces. J. Appl. Meteorol. 1972, 11, 51–59. [Google Scholar] [CrossRef]
- Gneiting, T. Correlation Functions for Atmospheric Data Analysis. Q. J. R. Meteorol. Soc. 1999, 125, 2449–2464. [Google Scholar] [CrossRef]
- Gelb, A. Applied Optimal Estimation; The MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Moreaux, G. Compactly Supported Radial Covariance Functions. J. Geod. 2008, 82, 431–443. [Google Scholar] [CrossRef]
- Shaw, L.; Paul, I.; Henrikson, P. Statistical Models for the Vertical Deflection from Gravity-Anomaly Models. J. Geophys. Res. (1896–1977) 1969, 74, 4259–4265. [Google Scholar] [CrossRef]
- Kasper, J.F. A Second-Order Markov Gravity Anomaly Model. J. Geophys. Res. (1896–1977) 1971, 76, 7844–7849. [Google Scholar] [CrossRef]
- Jordan, S.K. Self-Consistent Statistical Models for the Gravity Anomaly, Vertical Deflections, and Undulation of the Geoid. J. Geophys. Res. (1896–1977) 1972, 77, 3660–3670. [Google Scholar] [CrossRef]
- Moritz, H. Least-Squares Collocation. Rev. Geophys. 1978, 16, 421–430. [Google Scholar] [CrossRef]
- Vyskočil, V. On the Covariance and Structure Functions of the Anomalous Gravity Field. Stud. Geophys. Geod. 1970, 14, 174–177. [Google Scholar] [CrossRef]
- Andersen, O.B.; Knudsen, P. Global Marine Gravity Field from the ERS-1 and Geosat Geodetic Mission Altimetry. J. Geophys. Res. Ocean. 1998, 103, 8129–8137. [Google Scholar] [CrossRef]
- Andersen, O.B. Marine Gravity and Geoid from Satellite Altimetry. In Geoid Determination: Theory and Methods; Sansò, F., Sideris, M.G., Eds.; Lecture Notes in Earth System Sciences; Springer: Berlin/Heidelberg, Germany, 2013; pp. 401–451. [Google Scholar] [CrossRef]
- Chilès, J.P.; Delfiner, P. Geostatistics: Modeling Spatial Uncertainty; Wiley Series in Probability and Statistics; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar] [CrossRef]
- Julian, P.R.; Thiébaux, H.J. On Some Properties of Correlation Functions Used in Optimum Interpolation Schemes. Mon. Weather. Rev. 1975, 103, 605–616. [Google Scholar] [CrossRef]
- Thiébaux, H.J. Anisotropic Correlation Functions for Objective Analysis. Mon. Weather. Rev. 1976, 104, 994–1002. [Google Scholar] [CrossRef] [Green Version]
- Franke, R.H. Covariance Functions for Statistical Interpolation; Technical Report NPS-53-86-007; Naval Postgraduate School: Monterey, CA, USA, 1986. [Google Scholar]
- Weber, R.O.; Talkner, P. Some Remarks on Spatial Correlation Function Models. Mon. Weather. Rev. 1993, 121, 2611–2617. [Google Scholar] [CrossRef]
- Gaspari, G.; Cohn, S.E. Construction of Correlation Functions in Two and Three Dimensions. Q. J. R. Meteorol. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Mathematics in Science and Engineering; Academic Press: New York, NY, USA, 1979; Volume 141-1. [Google Scholar] [CrossRef]
- Schubert, T.; Korte, J.; Brockmann, J.M.; Schuh, W.D. A Generic Approach to Covariance Function Estimation Using ARMA-Models. Mathematics 2020, 8, 591. [Google Scholar] [CrossRef] [Green Version]
- Doob, J.L. Stochastic Processes; Wiley Series in Probability and Mathematical Statistics; Wiley: New York, NY, USA, 1953. [Google Scholar]
- Li, Z. Methods for Irregularly Sampled Continuous Time Processes. Ph.D. Thesis, University College London, London, UK, 2014. [Google Scholar]
- Wackernagel, H. Multivariate Geostatistics: An Introduction with Applications; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar] [CrossRef]
- Jenkins, G.M.; Watts, D.G. Spectral Analysis and Its Applications; Holden-Day: San Francisco, CA, USA, 1968. [Google Scholar]
- Priestley, M.B. Spectral Analysis and Time Series; Academic Press: London, UK; New York, NY, USA, 1981. [Google Scholar]
- Gelfand, A.E.; Diggle, P.; Guttorp, P.; Fuentes, M. Handbook of Spatial Statistics; Handbooks of Modern Statistical Methods; Chapman & Hall/CRC: Boca Raton, FL, USA, 2010. [Google Scholar] [CrossRef]
- Zastavnyi, V.P. Positive Definiteness of a Family of Functions. Math. Notes 2017, 101, 250–259. [Google Scholar] [CrossRef]
- Goldberg, S. Introduction to Difference Equations; Dover Publications: New York, NY, USA, 1986. [Google Scholar]
- Yaglom, A.M. Correlation Theory of Stationary and Related Random Functions: Volume I: Basic Results; Springer Series in Statistics; Springer: New York, NY, USA, 1987. [Google Scholar]
- Schaeffer, P.; Faugére, Y.; Legeais, J.F.; Ollivier, A.; Guinle, T.; Picot, N. The CNES_CLS11 Global Mean Sea Surface Computed from 16 Years of Satellite Altimeter Data. Mar. Geod. 2012, 35, 3–19. [Google Scholar] [CrossRef]
- Eaton, J.W.; Bateman, D.; Hauberg, S.; Wehbring, R. GNU Octave; Version 5.2.0 Manual: A High-Level Interactive Language for Numerical Computations; Free Software Foundation: Boston, MA, USA, 2020. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schubert, T.; Brockmann, J.M.; Korte, J.; Schuh, W.-D. On the Family of Covariance Functions Based on ARMA Models. Eng. Proc. 2021, 5, 37. https://doi.org/10.3390/engproc2021005037
Schubert T, Brockmann JM, Korte J, Schuh W-D. On the Family of Covariance Functions Based on ARMA Models. Engineering Proceedings. 2021; 5(1):37. https://doi.org/10.3390/engproc2021005037
Chicago/Turabian StyleSchubert, Till, Jan Martin Brockmann, Johannes Korte, and Wolf-Dieter Schuh. 2021. "On the Family of Covariance Functions Based on ARMA Models" Engineering Proceedings 5, no. 1: 37. https://doi.org/10.3390/engproc2021005037
APA StyleSchubert, T., Brockmann, J. M., Korte, J., & Schuh, W.-D. (2021). On the Family of Covariance Functions Based on ARMA Models. Engineering Proceedings, 5(1), 37. https://doi.org/10.3390/engproc2021005037