
A Mathematical Investigation of a Continuous Covariance Function Fitting with Discrete Covariances of an AR Process †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Continuous Covariance Function
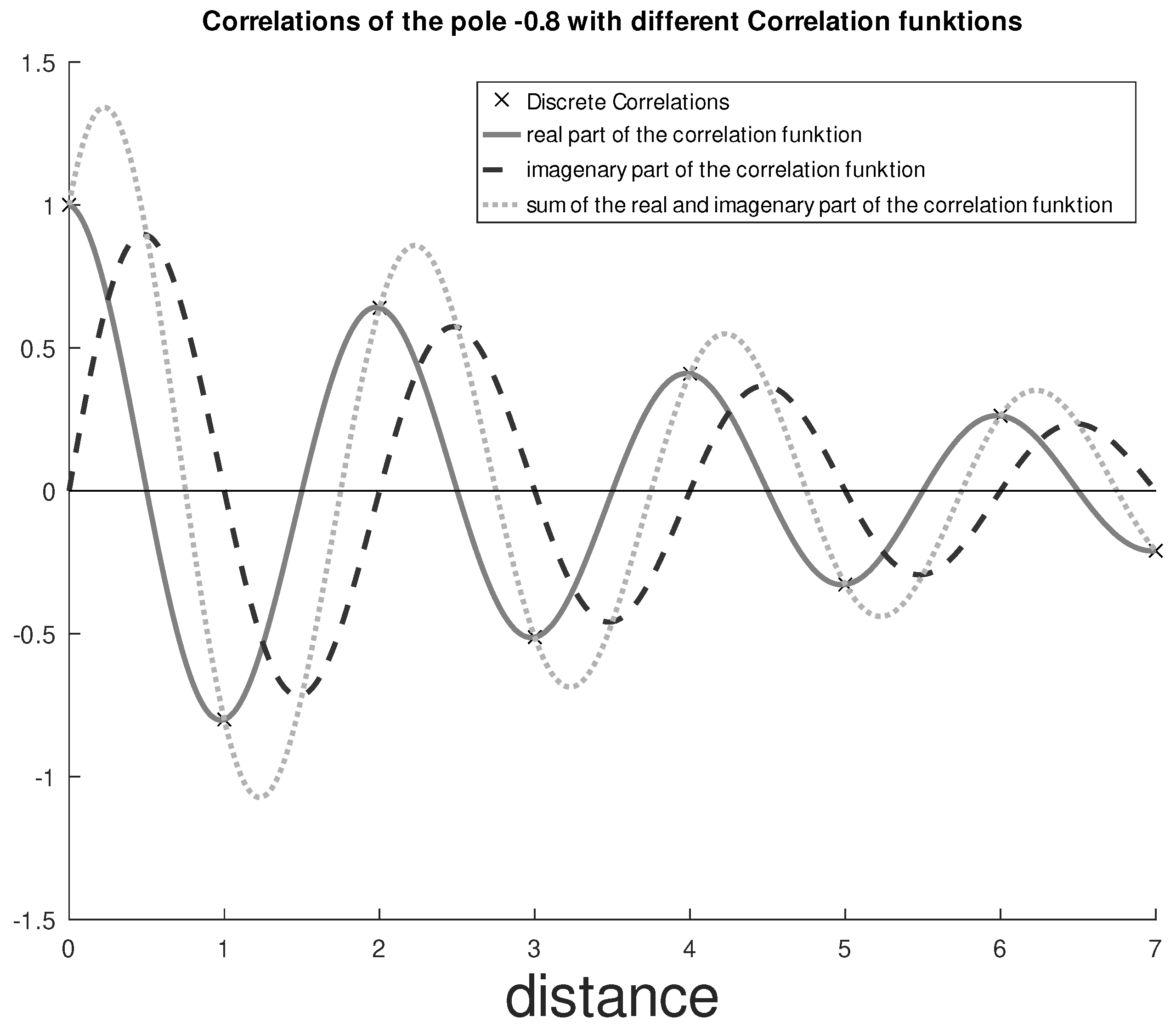
2.1. Construction of a Continuous Covariance Function
2.2. Properties of the Continuous Covariance Function
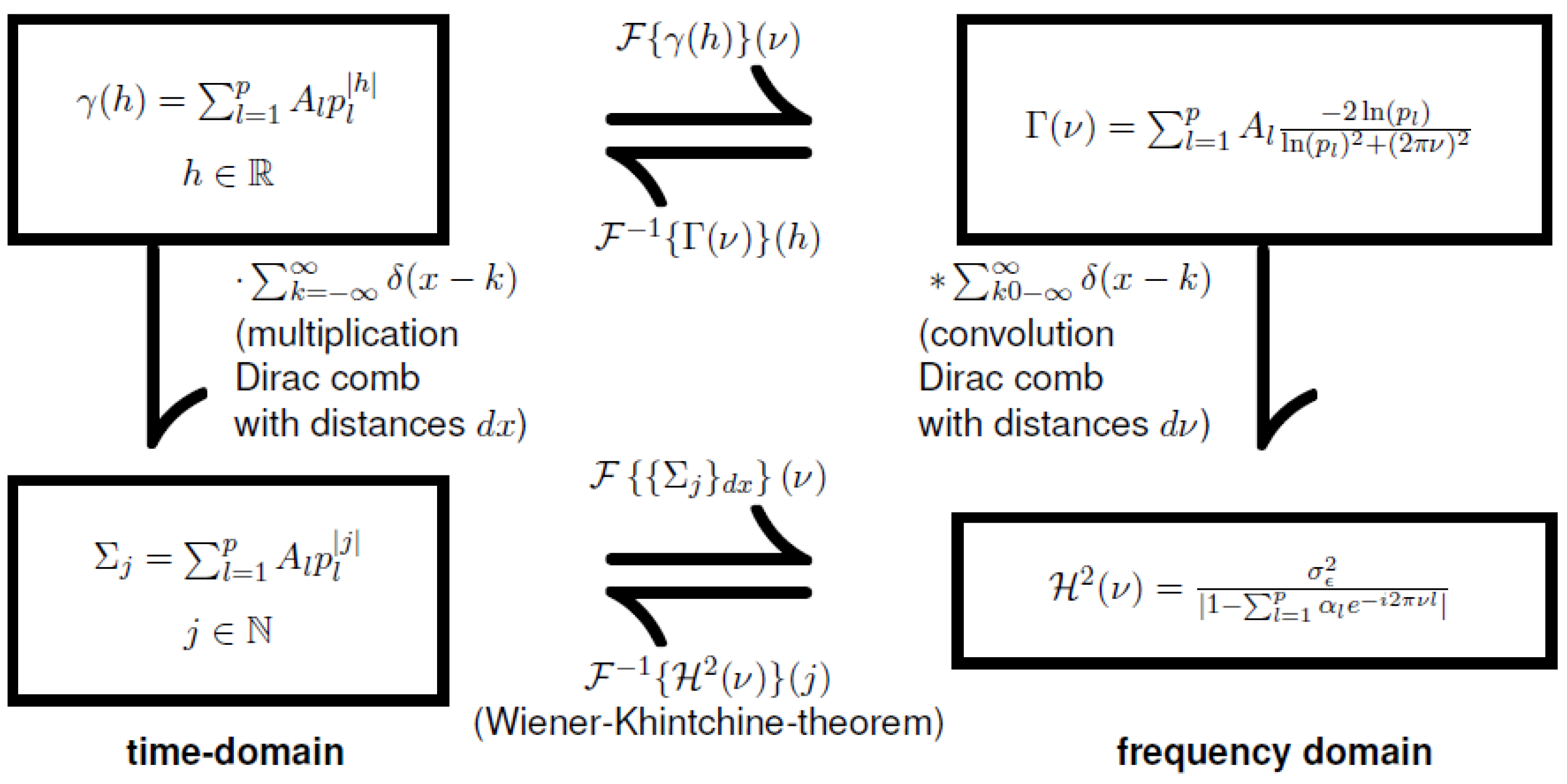
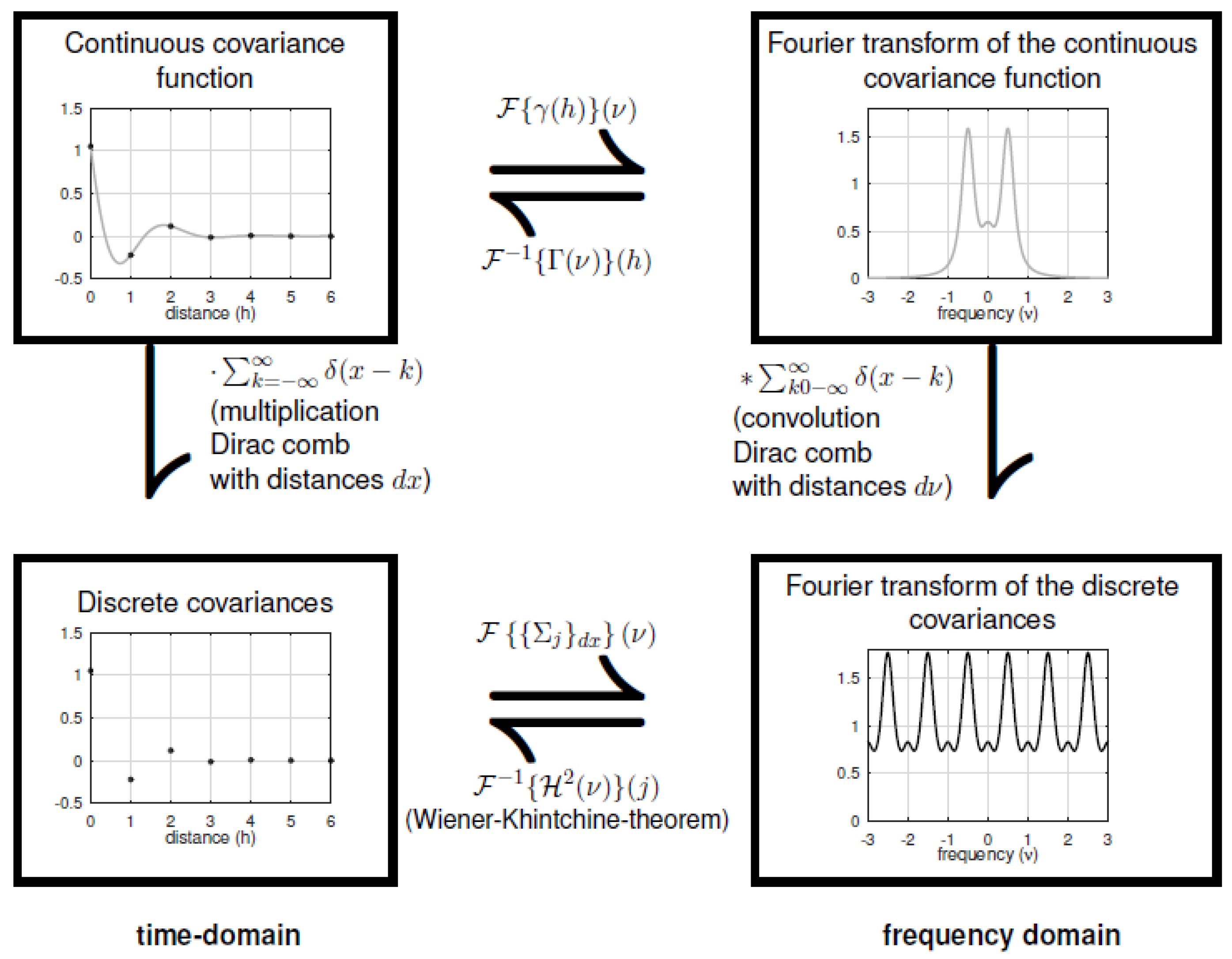
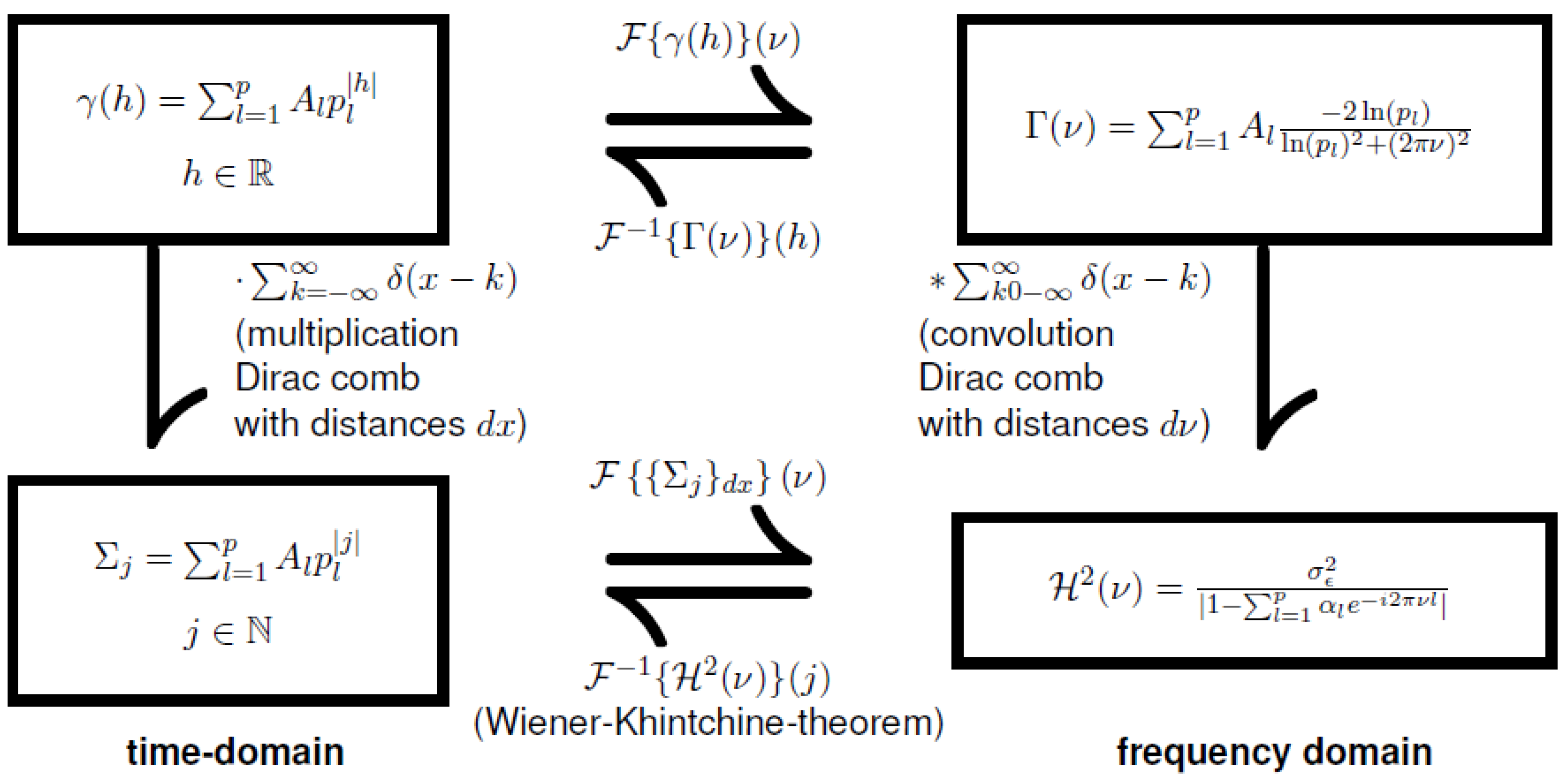
2.2.1. Power Spectral Density
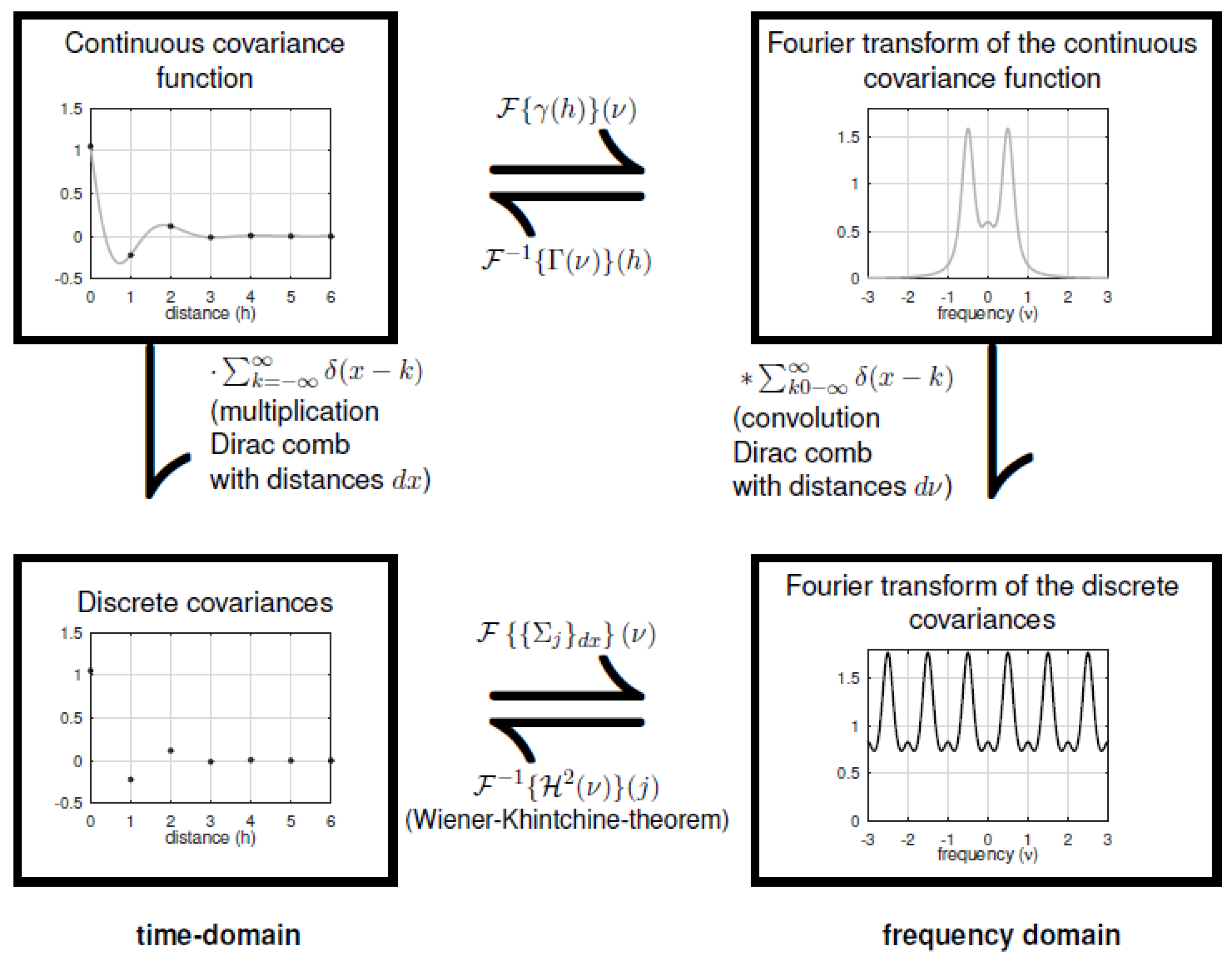
- The discrete covariances of an AR(p) process () are equivalent to the product of the Dirac comb with the continuous covariance function .
- The convolution theorem shows that multiplication in time domain results in convolution in frequency domain.
2.2.2. Positive Semi-Definite Function
3. Simulation
4. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Appendix A. General Fourier Transform of an AR(p) Process
Appendix B. Explicit Fourier Transform of the AR(1) Process and AR(2) Process with Two Complex Conjugated Zeros
Appendix B.1. Fourier Transform of the Continuous Covariance Function of AR(1) Processes
Appendix B.2. Fourier Transform of the Continuous Covariance Function of AR(2) Processes with Two Complex Conjugated Zeros
Appendix C. Convolution of the Fourier Transform of a Continuous Covariance Function of an AR Process with a Dirac Comb
References
- Förstner, W. Determination of the additive noise variance in observed autoregressive processes using variance component estimation technique. Stat. Decis. 1985, 2, 263–274. [Google Scholar]
- Förstner, W.; Wrobel, B.P. Photogrammetric Computer Vision–Statistics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 6. [Google Scholar]
- Koch, K. Rekursive Numerische Filter. Z. Für Vermess. 1975, 100, 281–292. [Google Scholar]
- Schuh, W.D. Tailored Numerical Solution Strategies for the Global Determination of the Earth’s Gravity Field; Mitteilungen Der Geodätischen Institute, Technische Universität Graz (TUG): Graz, Austria, 1996; Volume 81. [Google Scholar]
- Zeng, W.; Fang, X.; Lin, Y.; Huang, X.; Zhou, Y. On the total least-squares estimation for autoregressive model. Taylor Fr. 2018, 50, 186–190. [Google Scholar] [CrossRef]
- Krarup, T. A Contribution to the Mathematical Foundation of Physical Geodesy; Number 44 in Meddelelse; Danish Geodetic Institute: Copenhagen, Denmark, 1969. [Google Scholar]
- Moritz, H. Advanced Least-Squares Methods; Number 175 in Reports of the Department of Geodetic Science, Ohio State University Research Foundation: Columbus, OH, USA, 1972. [Google Scholar]
- Moritz, H. Least-Squares Collocation; Number 75 in Reihe A; Deutsche Geodätische Kommission: München, Germany, 1973. [Google Scholar]
- Dermanis, A. Kriging and collocation: A comparison. Manuscr. Geod. 1984, 9, 159–167. [Google Scholar]
- Schuh, W.D. Signalverarbeitung in Der Physikalischen Geodäsie. In Handbuch Der Geodäsie, Erdmessung Und Satellitengeodäsie; Freeden, W., Rummel, R., Eds.; Springer Reference Naturwissenschaften; Springer: Berlin/Heidelberg, Germany, 2016; pp. 73–121. [Google Scholar] [CrossRef]
- Schuh, W.D.; Brockmann, J. The Numerical Treatment of Covariance Stationary Processes in Least Squares Collocation. In Handbuch Der Geodäsie; Freeden, W., Ed.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Moritz, H. Advanced Physical Geodesy; Wichmann: Karlsruhe, Germany, 1980. [Google Scholar]
- Reguzzoni, M.; Sansó, F.; Venuti, G. The Theory of General Kriging, with Applications to the Determination of a Local Geoid. Geophys. J. Int. 2005, 162, 303–314. [Google Scholar] [CrossRef] [Green Version]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C. Time Series Analysis: Forecasting and Control, Fourth Edition; Wiley Series in Probability and Statistics; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar] [CrossRef]
- Brockwell, P.J.; Davis, R.A. Time Series Theory and Methods, 2nd ed.; Springer Series in Statistics; Springer: New York, NY, USA, 1991. [Google Scholar] [CrossRef]
- Buttkus, B. Spectral Analysis and Filter Theory in Applied Geophysics; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar] [CrossRef]
- Hamilton, J.D. Time Series Analysis; Princeton University Press: Princeton, NJ, USA, 1994. [Google Scholar]
- Priestley, M.B. Spectral Analysis and Time Series; Academic Press: London, UK; New York, NY, USA, 1981. [Google Scholar]
- Goldberg, S. Introduction to Difference Equations; Reprint ed.; Dover Publications: Mineola, NY, USA, 1986. [Google Scholar]
- Viète, F. Opera Mathematica, 1579; Reprinted in Leiden, Netherlands, 1646. [CrossRef]
- Schuh, W.D.; Krasbutter, I.; Kargoll, B. Korrelierte Messung—Was Nun. In Zeitabhängige Messgrößen—Ihre Daten Haben (Mehr-) Wert; Neuner, H., Ed.; DVW-Schriftenreihe; Wißner: Augsburg, Germany, 2014; Volume 74, pp. 85–101. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korte, J.; Schubert, T.; Brockmann, J.M.; Schuh, W.-D. A Mathematical Investigation of a Continuous Covariance Function Fitting with Discrete Covariances of an AR Process. Eng. Proc. 2021, 5, 18. https://doi.org/10.3390/engproc2021005018
Korte J, Schubert T, Brockmann JM, Schuh W-D. A Mathematical Investigation of a Continuous Covariance Function Fitting with Discrete Covariances of an AR Process. Engineering Proceedings. 2021; 5(1):18. https://doi.org/10.3390/engproc2021005018
Chicago/Turabian StyleKorte, Johannes, Till Schubert, Jan Martin Brockmann, and Wolf-Dieter Schuh. 2021. "A Mathematical Investigation of a Continuous Covariance Function Fitting with Discrete Covariances of an AR Process" Engineering Proceedings 5, no. 1: 18. https://doi.org/10.3390/engproc2021005018
APA StyleKorte, J., Schubert, T., Brockmann, J. M., & Schuh, W.-D. (2021). A Mathematical Investigation of a Continuous Covariance Function Fitting with Discrete Covariances of an AR Process. Engineering Proceedings, 5(1), 18. https://doi.org/10.3390/engproc2021005018