Abstract
Vision relies on precise eye movements controlled by six extraocular muscles (EOMs). Training kits and functional eye models are crucial for ophthalmological studies. The study investigates the potential of shape memory material (SMM) in ophthalmology, focusing on eye model mechanics and four thermally actuated smart EOMs. SMM was chosen over other actuators because of its high-power density (36 W/kg), high actuation forces (100 gf), and high displacements (200%). Finite element method (FEM) simulation on a 3D eye model was performed to analyze the thermo-mechanical properties of smart muscle, revealing the shape memory effect and super elasticity which result in the four eye movements of elevation, depression, adduction, and abduction. FEM simulation, compared to the eye model prototype, yielded a 16 mm deformation in smart muscle with a thermal actuation of 313 K (40 °C). FEM analysis, while combining smart muscle with the eye model, resulted in a 6.8517 mm deformation in the simulation. Prototype deformation was acquired as 7.262 mm. The successful actuation of the eye using thermally actuated smart muscles proves its potential for ophthalmology kits.
1. Introduction
The study focuses on the importance of understanding EOM mechanics for scientific and ophthalmological purposes. Existing models have limitations in replicating the complex functionality of human eye movements [1]. Training kits and models are necessary for teaching EOM assessment [2]. Previous biomimetic devices have attempted to mimic realistic eye movements using different approaches such as robotics [3], and rubber-based models [4]. SMMs have gained popularity in soft robotics and biomedical fields due to their unique characteristics, allowing them to recover their shape after deformation [5]. This study explores the potential of using SMMs in ophthalmology, considering their high-power density, actuation forces, and displacements. FEM simulations on a 3D eye model are conducted to analyze the shape memory effect and super elasticity of smart muscles. The simulations demonstrate that SMMs can enable realistic eye movements, including elevation, depression, adduction, and abduction. The results are evaluated by comparing the FEM simulation with an eye model prototype.
2. Methodology
A digital three-dimensional (3D) eye model was created using Solid Works computer-aided design (CAD) software, accurately representing the sclera, cornea, lens, and optic nerve [6]. The rectus muscles were replaced with SMMs from the BMX 150 series by Toki Corporation [7]. The oblique muscles were not included, as the scope of this study does not include the rotation motions of the eye. The SMM helices were attached to the eye sclera as muscle replacements, with the other end secured on top of the optic nerve. In this study, shape memory-based helix structures mimic four EOM, including the superior, inferior, medial, and lateral recti. The dimensions of the eye model and muscle helix are shown in Table 1.

Table 1.
Dimensions of helical spring mimicking extraocular muscle and eyeball along with the support shaft mimicking the optic nerve.
2.1. Simulation and Fabrication
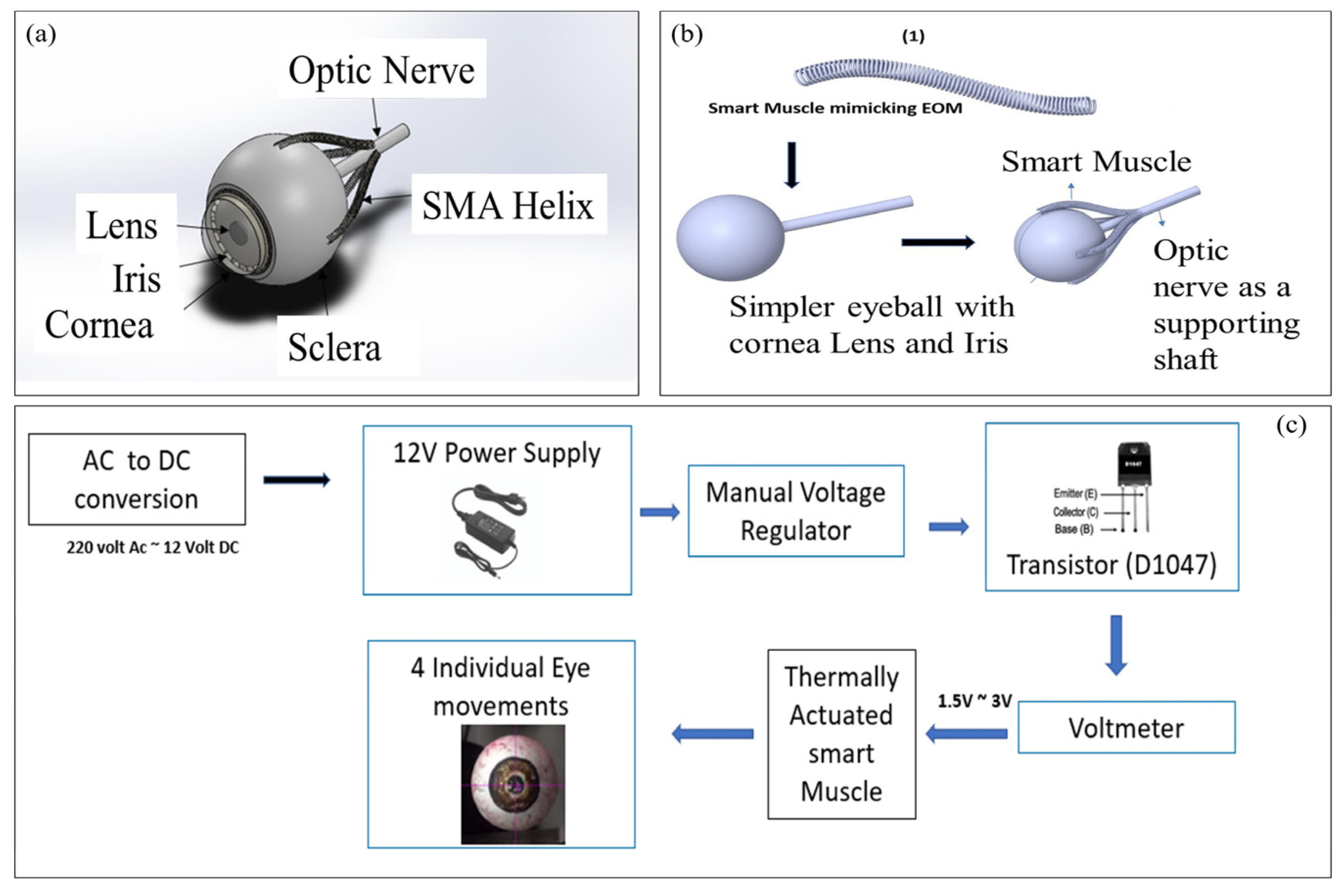
A simplified eye model was created for efficient simulation in Ansys Workbench 22 R1. The model utilized SMM for the helical spring and rubber for the eye material, as shown in Figure 1a,b. Material properties, such as elastic modulus and temperature scaling parameters, were defined. After successful meshing, the model underwent thermomechanical analysis with applied forces and varying temperatures. After a successful simulation, and the acquired results, the next step was to 3D-print a CAD model. The Stereo Lithography (STL) file of the model was evaluated prior to the printing. The meshing size and printing parameters were observed. Finite difference method (FDM)-based 3D printing was performed on a reality Ender 3D printer using a material polylactic acid (PLA).
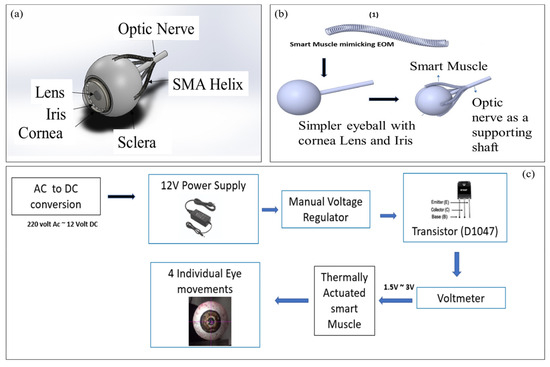
Figure 1.
Complete schematic: (a) finished 3D model with labeled anatomy; (b) complete schematic of the model used for simulation; (c) Block diagram of an open loop-based control system used for prototype testing.
2.2. Prototype Testing
The model underwent testing and physical analysis using an open-loop control system. A fixed voltage of 0–12 V was acquired as an output whereas the muscle was activated on 2.8 V and 1.5 A. The muscle was stretched to twice its original length using hand force, and then contracted back by applying a stimulus in terms of joule heating via voltage from a control system. The smart muscles’ shape memory effect enabled them to deform and move the eye. Four muscles were given individual stimuli to observe desired movements, including elevation, depression, adduction, and abduction. Figure 1d shows the block diagram of a control system.
3. Results and Discussion
3.1. Simulation Results
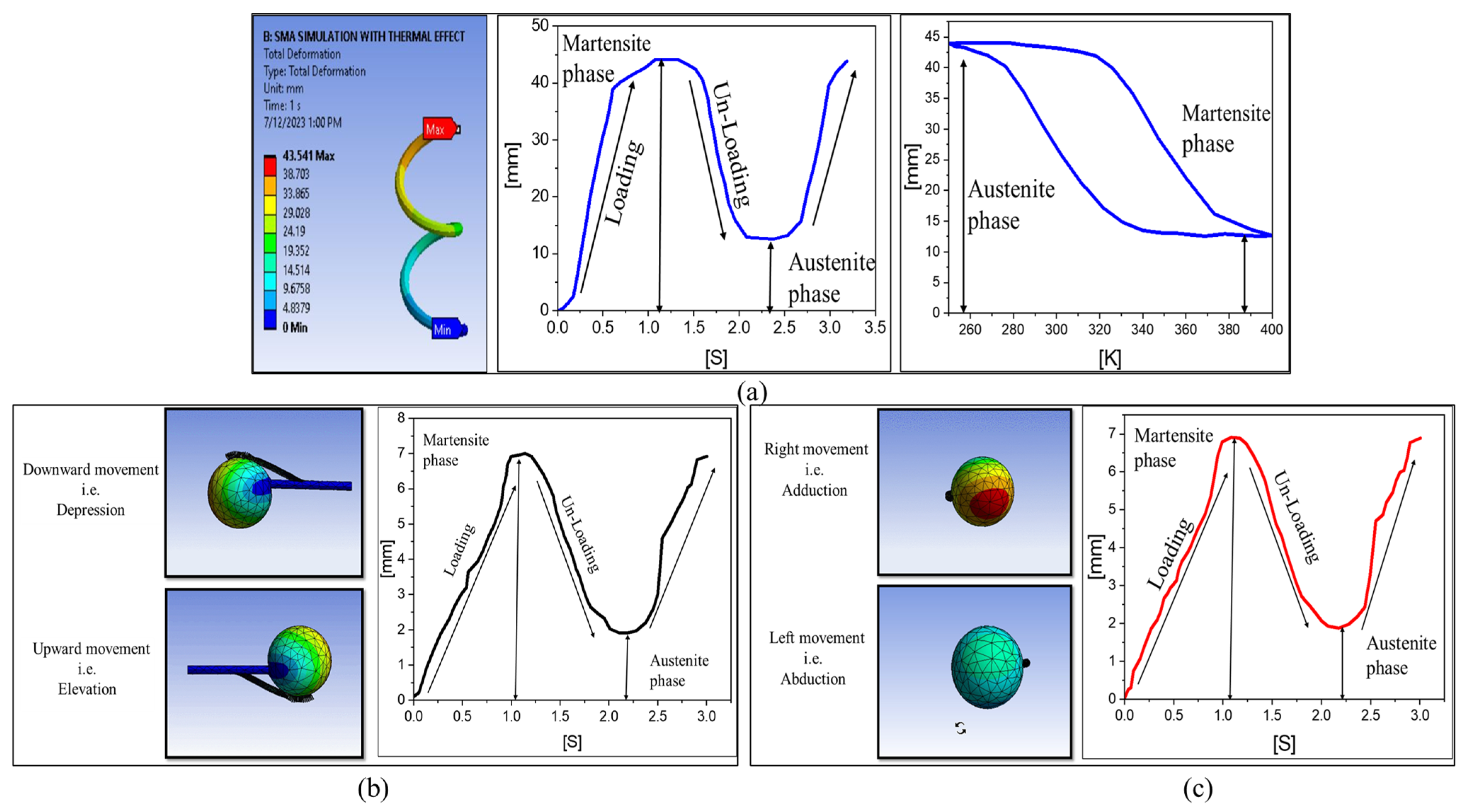
The simulation results are shown in Figure 1a–c. It was observed that the maximum displacement in the case of SMM was 43 mm, greater than the original length of 28 mm, i.e., 28 − 43 = 15 mm. The results have been validated with the constitutive model based on Hencky strain [8]. Meanwhile, the shape memory helix attached to an eyeball gave a maximum displacement of 6.8157 mm in all four cases but with different axes, two movements in the horizontal axis (+x, −x) and two in the vertical (+y, −y). Figure 2 shows the simulation results.
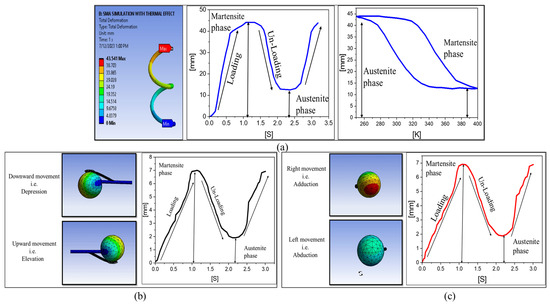
Figure 2.
Simulation results: (a) smart muscle showing deformation vs. time, and deformation vs. temperature; (b) smart muscle attached with eyeball showing shape memory effect in terms of deformation vs. steps for two vertical movements; (c) smart muscle attached with eyeball showing shape memory effect in terms of deformation vs. steps for two horizontal movements.
3.2. Prototype Results
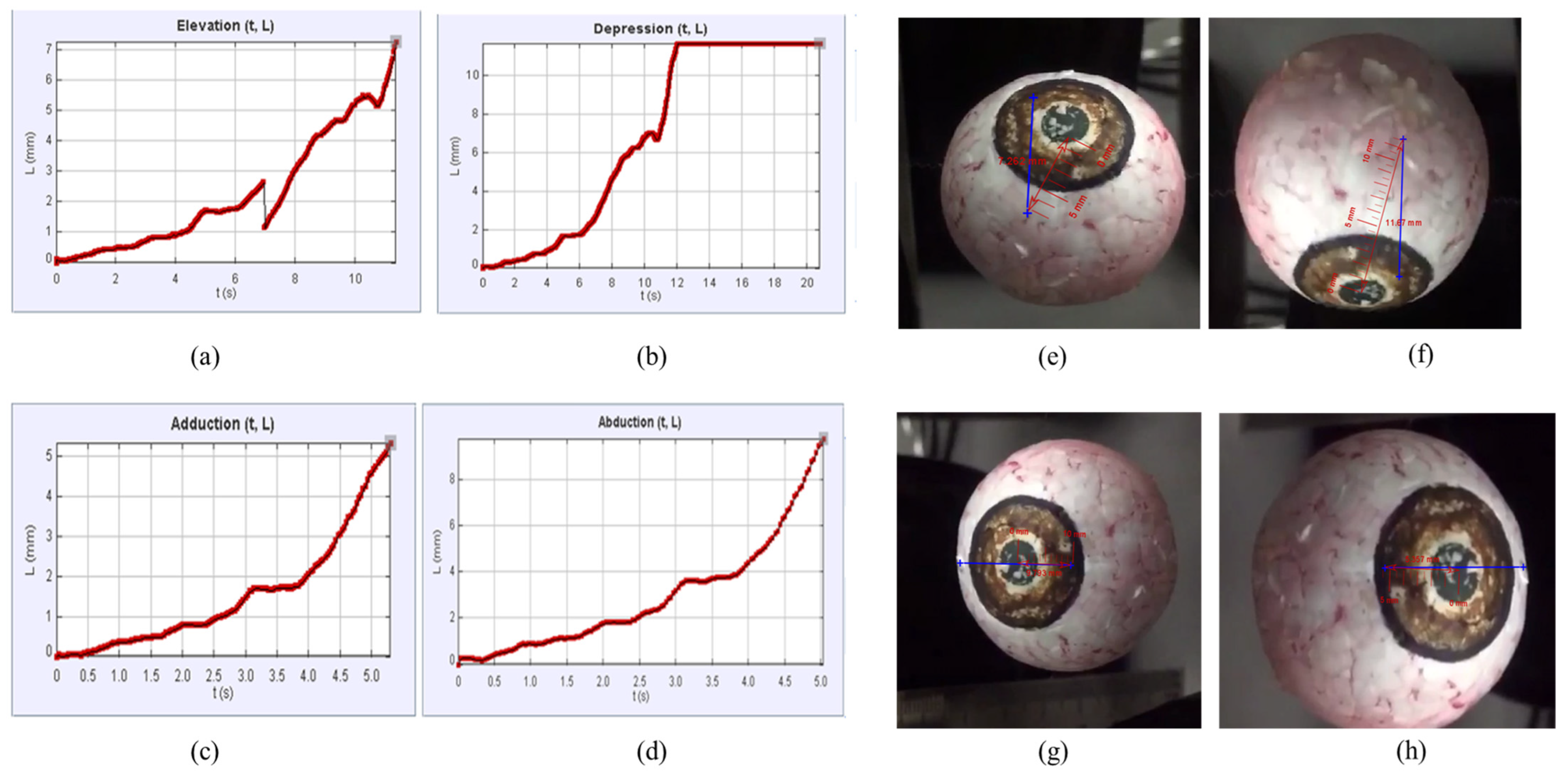
The eyeballs with four shape memory helixes were subjected to the control system, as shown in Figure 1d, to provide a stimulus in terms of joule heating so that SMM could contract and relax just like a muscle and achieve the necessary movements. The primary action against each muscle was observed using tracker software and a modeling tool. The results acquired in the form of primary eye movements and their deviation in length over time are shown in Figure 3 and Table 2.
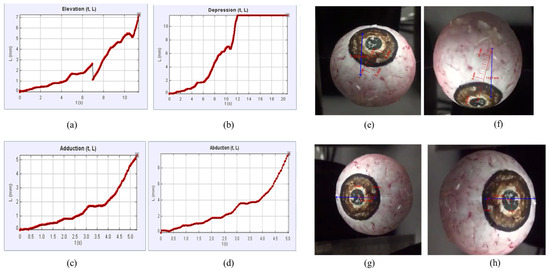
Figure 3.
Tracker graphs acquired against all primary eye movements: (a) elevation caused by superior rectus (b) depression caused by inferior rectus (c) adduction caused by medial rectus (d) abduction caused by lateral rectus Prototype eye model movements: (e) upward movement, i.e., elevation; (f) downward movement, i.e., depression; (g) leftward movement, i.e., abduction; (h) rightward movement, i.e., adduction.
Table 2.
Primary eye movements and their deviation in length over time.
4. Conclusions
The following information was obtained:
- i.
- Tracking graphs were acquired (distance covered over time using video analysis and modeling tool).
- ii.
- The speeds of four extraocular smart muscles (SR = 0.638 mm/s, IR = 0.957 mm/s, MR = 1.94 mm/s, LR = 1.010 mm/s).
- iii.
- Deformation of smart muscle (simulation = 6.8517 mm, prototype = 7.262 mm).
- iv.
- Motion of an eyeball (elevation/upward, depression/downward, adduction/right, abduction/left).
- v.
- Material phase characterizations were observed (martensite phase to austenite phase).
Author Contributions
Conceptualization, Z.A. and J.Z.G.; methodology, Z.A. and J.Z.G.; software, Z.A; validation, Z.A. and J.Z.G.; formal analysis, Z.A. and J.Z.G.; investigation, Z.A. and J.Z.G.; data curation, Z.A.; writing—original draft preparation, Z.A.; writing—review and editing, Z.A.; supervision, J.Z.G.; project administration, J.Z.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data will be available on request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Regal, S.; Troughton, J.; Djenizian, T.; Ramuz, M. Biomimetic models of the human eye, and their applications. Nanotechnology 2021, 32, 302001. [Google Scholar] [CrossRef] [PubMed]
- Bernd, P.; Jakway, J. A simplified approach to teaching medical students ocular movements and the rationale in testing the oculomotor, trochlear, and abducent nerves. Anat. Sci. Educ. 2008, 1, 126–129. [Google Scholar] [CrossRef] [PubMed]
- Gu, J.J.; Meng, M.; Cook, A.M.; Liu, P.X. Design, Sensing and Control of a Robotic Prosthetic Eye for Natural Eye Movement. Appl. Bionics Biomech. 2006, 3, 134949. [Google Scholar] [CrossRef]
- Wood, A.J.; Dayal, M.R. Using a Model to Understand the Symptoms of Ophthalmoplegia. J. Undergrad. Neurosci. Educ. 2018, 16, R33–R38. [Google Scholar] [PubMed]
- Copaci, D.-S.; Blanco, D.; Martin-Clemente, A.; Moreno, L. Flexible Shape Memory Alloy Actuators for Soft Robotics: Modelling and Control. Int. J. Adv. Robot. Syst. 2020, 17, 1729881419886747. [Google Scholar] [CrossRef]
- Bekerman, I.; Gottlieb, P.; Vaiman, M. Variations in Eyeball Diameters of the Healthy Adults. J. Ophthalmol. 2014, 2014, 503645. [Google Scholar] [CrossRef] [PubMed]
- Biometal Toki Corporation Co., Ltd. Available online: https://www.toki.co.jp/biometal/english/contents.php (accessed on 10 December 2022).
- Arghavani, J.; Auricchio, F.; Auricchio, F.; Naghdabadi, R. A Finite Strain Kinematic Hardening Constitutive Model Based on Hencky Strain: General Framework, Solution Algorithm and Application to Shape Memory Alloys. Int. J. Plast. 2011, 27, 940–961. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).