Abstract
The unprecedented transformation of contemporary power systems, mainly evidenced by the high penetration of renewable energy generation and the shift from passive to active, bi-directional smart grids, has put an extraordinary burden on power system operation and control. The uncertainties created by the two aforementioned factors greatly propel the necessity of more accurate and robust system monitoring. Concurrently, an ever-increasing amount of electronics-based power generation makes frequency stability a major challenge to power system operation and control due to the vastly diminishing system inertia. As a crucial part of system control, frequency monitoring is utilized to identify potential stability issues and eventually prevent cascading power outages and blackouts. This paper proposes a dynamic state estimation (DSE) methodology that employs deep learning (DL) techniques based on feed-forward artificial neural networks (ANN) to accurately predict power system disturbances in terms of frequency disturbance events (FDE) caused by line outages, load/generation tripping events, and various types of faults. The proposed methodology was tested on a test grid model with high penetration of renewable generation, using an open-source data generator. It was concluded that DL-based DSE can be successfully utilized in the FDE detection process to improve frequency monitoring and control, and to maintain optimal performance, stability, and security of power systems.
1. Introduction
One of the greatest challenges nowadays in electric power systems is preserving the normal system state. This task vastly depends upon the capabilities of supervisory control and data acquisition (SCADA) systems to uninterruptedly observe the system and detect abnormalities in daily operation. In this process, a crucial role is played by the functionality called system state estimation (SSE), described as the procedure of approximating the system state variables by utilizing a fairly small number of measurements at specific locations [1]. However, this process relies on the steady-state system model and has lately become difficult to obtain due to recent changes in the system operation brought about by the growing renewable energy penetration, large-scale integration of distributed energy resources (DER), load fluctuations, and the shift from conventional passive to active, bi-directional smart grids.
As a result, it was suggested [2] that SSE methods used in contemporary energy management systems (EMS) should be reviewed and improved with new monitoring tools, such as dynamic state estimation (DSE).
A crucial application that benefits from the concept of DSE in power system monitoring is frequency stability monitoring. Essentially, frequency monitoring is used to identify potential frequency stability issues and eventually prevent cascading power outages and blackouts. Moreover, the significance of frequency monitoring is growing due to the rapidly increasing amount of converter-dominated generation that causes reduced system inertia.
As a solution to the aforementioned issues, this paper proposes a dynamic state estimation (DSE) methodology that uses deep learning (DL) techniques based on feed-forward artificial neural networks (ANN) to accurately predict power system disturbances in terms of frequency disturbance events (FDE) caused by line outages, load/generation tripping events, and various types of faults.
The paper is organized into four major sections. The introductory part describes specific phenomena which were essential prerequisites for the conducted research, beginning with dynamic state estimation, building on the notion of frequency disturbance detection, and the usage of DSE in modeling, monitoring, and operation of power systems, with a particular emphasis on frequency monitoring. The final synthesis of the main research focus topics is given in the Proposed Methodology section, where ANN-based FDE as a functionality of DSE is elaborated and tested. Finally, the Results section summarizes the findings which are used to draw the conclusions.
2. Dynamic State Estimation
Although the first notions of the DSE concept came in the 1970s [3], there was not much scientific activity on the topic until the introduction of phasor measurement units (PMU). Dynamic state estimation solves the problem of estimating the dynamic state vector of the following general discrete-time state space model:
where is the system state vector (e.g., internal states of a machine or a dynamic load), is the algebraic state vector (e.g., voltage and current phasors), is the input vector, is the model parameter vector, is the measurement vector (which may involve measured variables such as active and reactive power flows, as well as pseudo-measurements), is the nonlinear measurement function; is the error which consists of time discretization and model approximation errors.
DSE usually involves two steps [4]:
- Prediction step at time step i−1 using (1) directly or through a set of points drawn from the probability distribution of the state estimate.
- Filtering/update step using (2). The predictions are used together with the measurements at time i to estimate the state vector and its covariance matrix.
Most recently proposed DSE algorithms in the literature were based on decentralized derivative-free Kalman filtering [5], ensemble Kalman filter (EnKF) [6], square root cubature Kalman filtering (SRCKF) [7,8], unscented Kalman filter (UKF) [9,10], central difference filter (CDF) [11], extended Kalman filter (EKF) [12], ensemble particle filter (PF) [13], hybrid-learning DSE (HL-DSE) [14], as well as multi-model adaptive approaches such as [15].
Due to DSE’s undeniable connection to static state estimation (SSE), there is a need to briefly outline the differences between SSE and DSE. As previously established [16], SSE is essentially a procedure which involves a number of different modules, such as topology identification, observability assessment, bad data detection, pseudo-measurement generation, and state estimation solver. Whereas SSE has been an established tool in energy management systems (EMS), DSE is still an up-and-coming topic in the power system operation and control realm. For these reasons, it is crucial to understand the major differences between the two with respect to the main technical and operational aspects. A summary of these, adapted from [17], is given in the Table 1.

Table 1.
Comparison of SSE and DSE.
From the application point of view, SSE’s snapshot-based output allow EMS functions such as power flow calculation, load forecasting, security assessment, static voltage stability studies, etc., while DSE’s fast sampled and time-synchronization features enhance the system operation by allowing the tracking of dynamic states, which enables applications such as dynamic security assessment (DSA), rotor angle stability assessment, various adaptive system protection schemes, etc.
The numerous functional benefits of DSE have been thoroughly studied in the literature, and can be summarized as follows:
- Improved model reliability for DSA [18];
- Enhanced oscillations monitoring by modal analysis by hierarchical and distributed DSE in small areas [19];
- Improved reliability of protection systems [20];
- Upgraded supervision of transient stability [21];
- Improved ROCOF evaluation [22];
- Failure detection in controllers [23], etc.
3. DSE in Frequency Monitoring
Frequency monitoring is an essential process in everyday operation and control of power systems as it offers crucial insight into potential system disturbances commonly caused by generator outage, line or load tripping [24]. Frequency disturbance events (FDE) are caused by a (temporary) imbalance of active power in the system, i.e., a difference between the generated and consumed active power. During such an event, the machine rotors speed up or down, which leads to abrupt changes in frequency. Mathematically, the relationship between active power balance and frequency in a power system with n machines can be expressed as:
In the above equations, and are machine rotor speed and frequency, respectively, is the nominal system frequency, is the imbalance between mechanical and electrical power, and is the cumulative system inertia. The term can also be expressed as , and represents the ratio of change of frequency (ROCOF), a parameter which can be obtained from PMU data as a difference between two timestamps with a time interval k:
Another important parameter is the change of bus voltage angle shift, given by:
ROCOF and bus voltage angle differential are used as significant FDE detection and monitoring parameters. Since the frequency disturbance events may leave a vast impact on power system stability and supply security, such as a costly large-scale blackout [25], efficient and accurate FDE monitoring which uses these parameters is essential for situational awareness and system controllability.
System frequency estimation has been recognized [17] as one of the seven key functions of DSE which provide an improved dynamic situational awareness in power system monitoring. The great refresh rate of phasor measurement units (PMU) has led to the development of various data-driven event detection methods for frequency monitoring. Recently proposed approaches were focused on multi-resolution statistical calculations, such as the Stockwell transform [26], signal energy transformation method [27], empirical mode decomposition [28], or machine learning methods, such as recurrent neural network (RNN) and long short-term memory (LSTM) model [29] and wide-area measurement systems-based two-level methodology [30].
This paper combines the previously defined notions by using the DSE estimation results to augment the PMU data and use it as input to deep learning techniques for frequency deviation detection. Therefore, this paper aims to verify the hypothesis that DSE can be used for dynamic frequency monitoring due to its inherent advantages and fast response, which allow quick and accurate machine rotor speed and angle estimation as some of the main products of DSE.
Moreover, the estimated machine rotor speeds may be used to determine the bus frequencies and the rate of change of frequency (ROCOF), after which the bus frequencies may be tracked and used for frequency deviation detection which employs machine learning approaches of ANN-based pattern recognition and classification. It is assumed that using the estimated rotor speeds/ROCOF as additional variables will lead to a much smaller requirement for the number of installed phasor measurement units (PMU) for frequency monitoring, which significantly reduces operational and investment costs, while achieving optimal system monitoring performance.
4. Proposed Methodology
The initial milestone of the proposed methodology is using the DSE results to augment the state variables and utilize the PF-FEDG tools based on the Python API of PowerFactory network analysis software, provided in [31], to enable different scenarios and events data to be stored in Pandas DataFrame structure. The datasets are then used by the PyTorch library for training and testing a feed-forward neural network (FNN), which is a computational network that attempts to emulate the decision process analogous to the one in human nerve cells. The FNN is then used as an FDE classifier, and its accuracy and robustness are checked and verified by using a test model described in the next section.
5. ANN-Based FDE Classifier
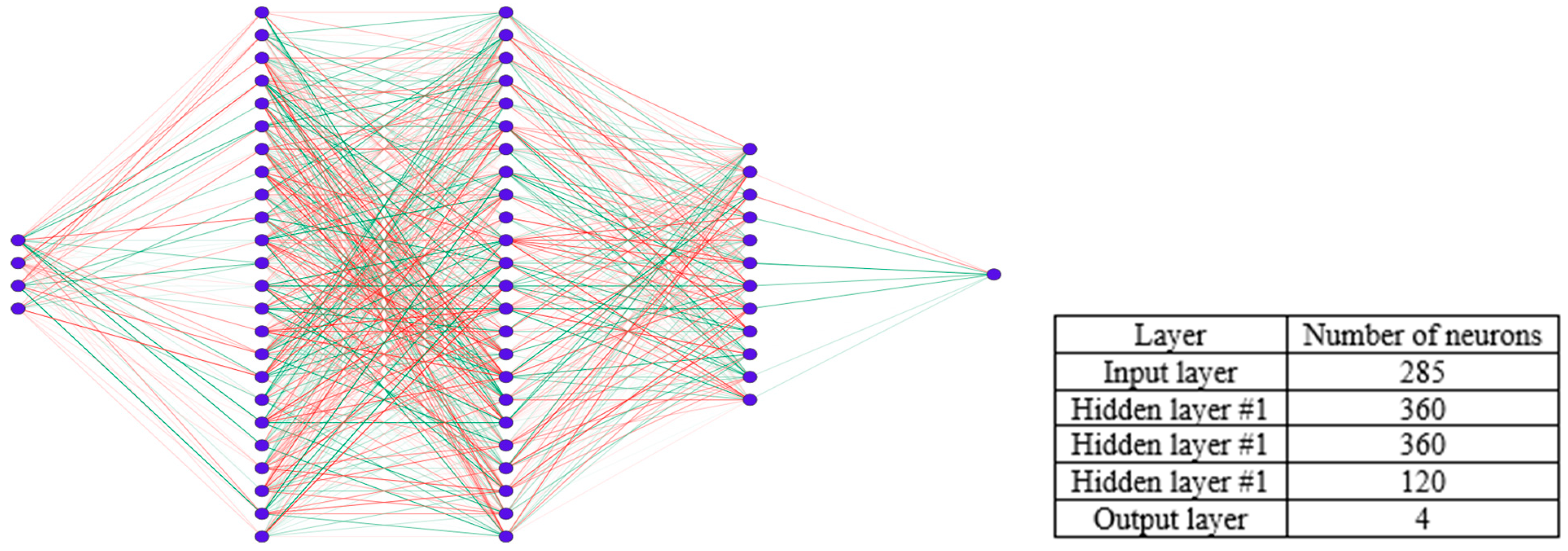
The proposed model, shown in Figure 1, is a feed-forward neural network that contains an input layer of 285 neurons (the number equal to the product of 15 samples and 19 installed PMUs), three hidden layers (two layers of 360 neurons each and one layer consisting of 120 neurons), and an output layer of four neurons, which correspond to the four FDE classes: generator fault (G), load trip (L), frequency oscillation/bus fault (F), and line outage (LO) event. Two activation functions between adjacent layers were used: rectified linear unit (ReLU) and hyperbolic tangent. Their expressions are given below:
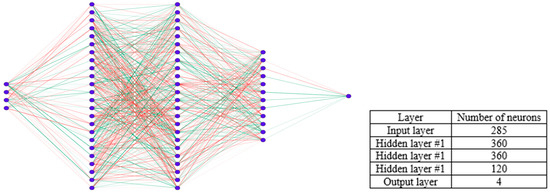
Figure 1.
Structure of the proposed FNN.
In addition to the two abovementioned activation functions, the output layer utilizes the softmax function, which creates a probability distribution function over predicted output classes, where the neuron which has the biggest probability represents the predicted output class. It is expressed as:
where x is a vector that contains m entries.
The following parameters were used in the ANN training process:
- Learning rate: 0.0001,
- Number of epochs: 250,
- Optimizer: stochastic gradient-based Adam
- Dropout (to avoid overfitting): 0.5–0.8.
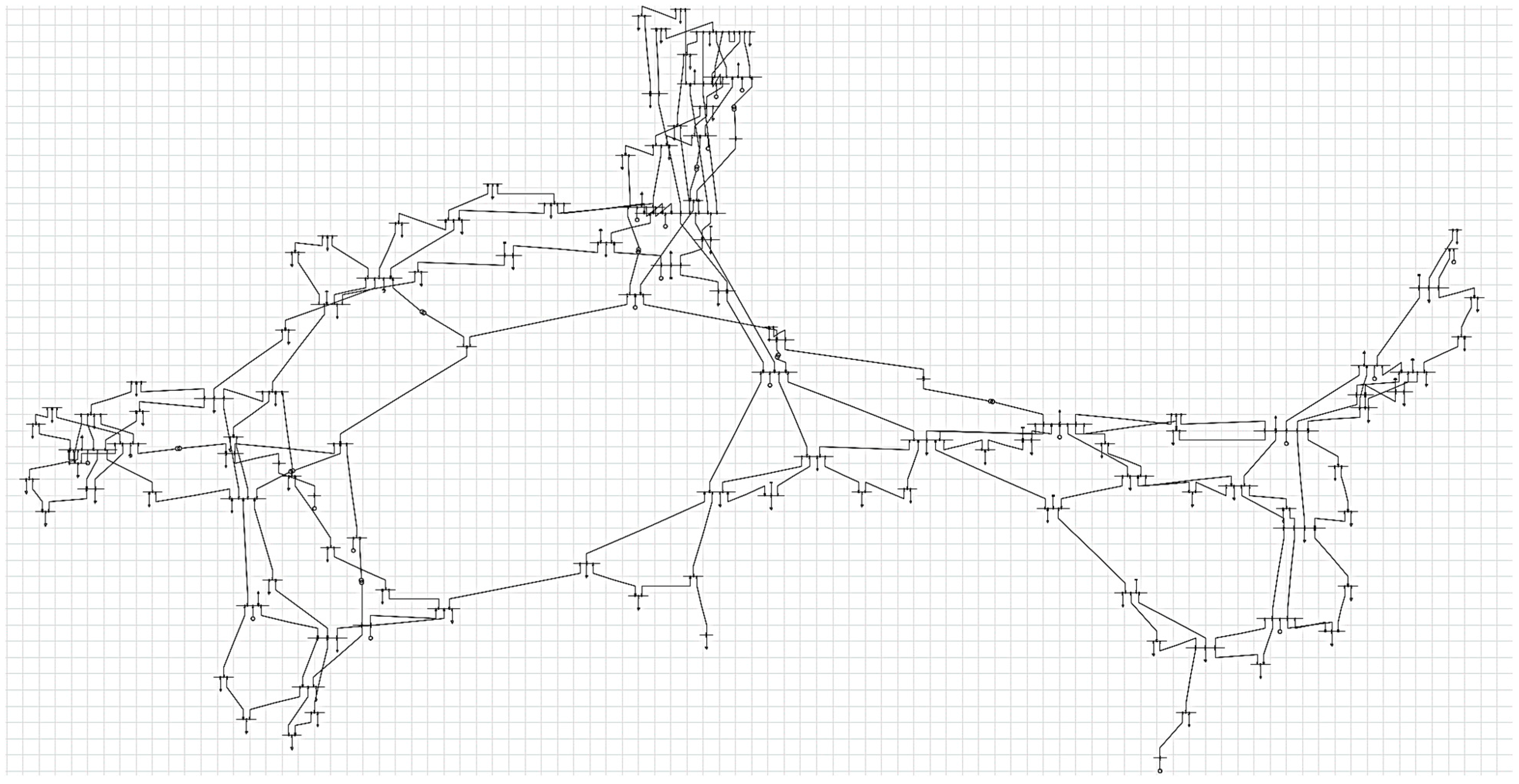
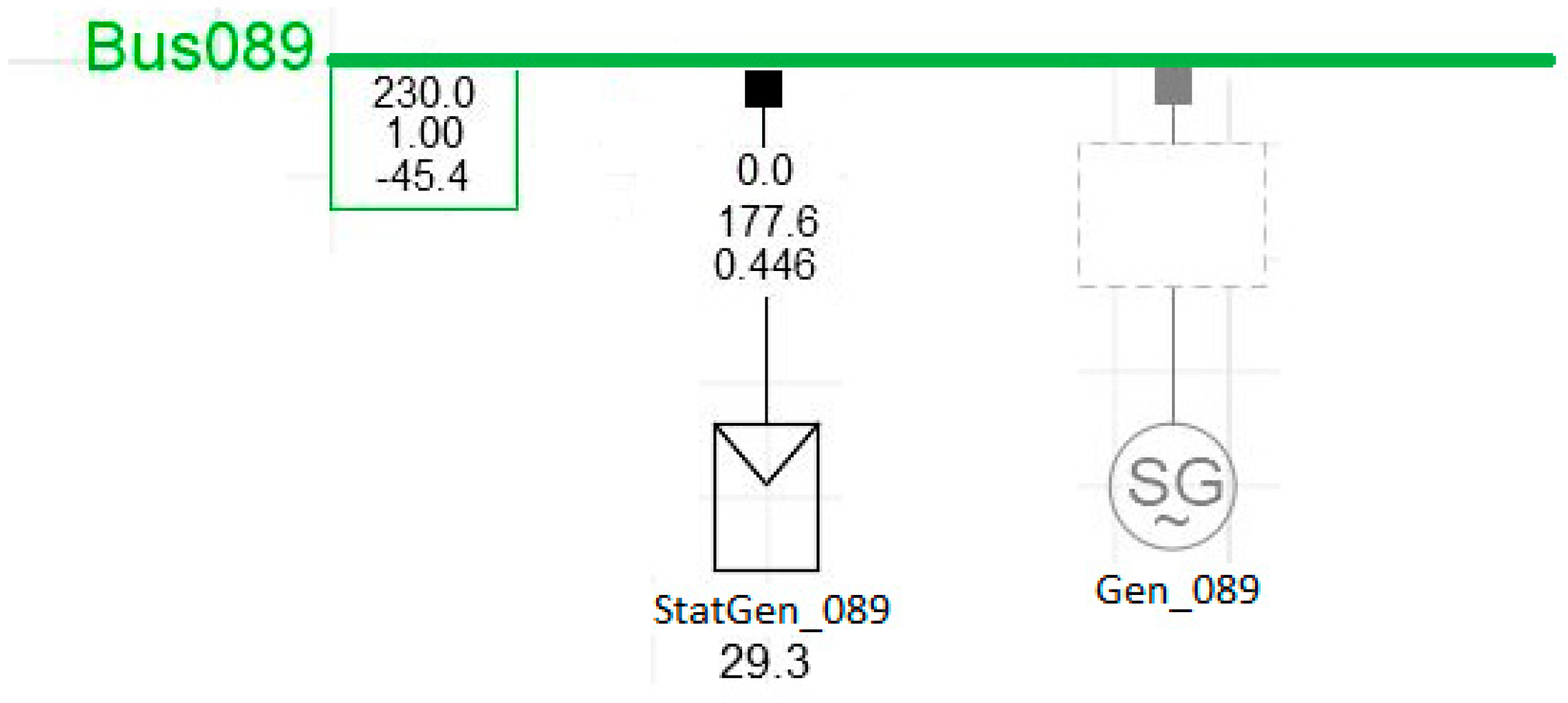
The analyzed grid is a modified IEEE 118-bus test system, whose topology can be seen in Figure 2. The original network used for testing [31] consisted of 19 synchronous generators, 99 loads, 177 lines and nine transformers. First, the system frequency was modified to 50 Hz to emulate a European transmission system. Moreover, 33% of generation (six generators) was put of service and essentially converted into static generators (PV type) according to their apparent powers, as shown in Figure 3, to simulate a future scenario of high penetration of renewable generation and a lower system inertia level. The PMUs were installed on the following 19 buses: 10, 12, 25, 26, 27, 31, 46, 54, 59, 63, 65, 66, 69, 80, 87, 89, 100, 103, and 111. Therefore, each generator bus has its own phasor measurement unit to obtain the four monitored variables: bus frequency, bus voltage amplitude, ROCOF, and bus relative angle shift. As previously defined, the data were used to generate four types of FDEs: G, L, F, and LO. All events were defined for the load levels of 0.95, 1, and 1.05. The frequency oscillation event is simulated by a short-circuit fault at 0.1 s and cleared at 1 s. A total of 6828 FDEs was generated by the tool, and an overview can be seen in Table 2.
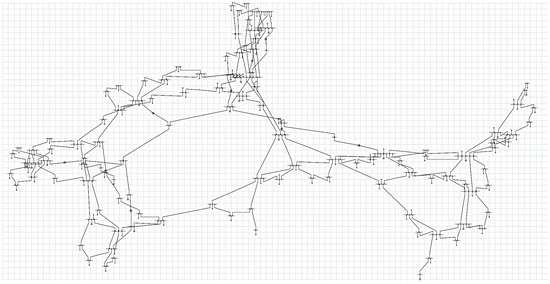
Figure 2.
One-line diagram of the test system.
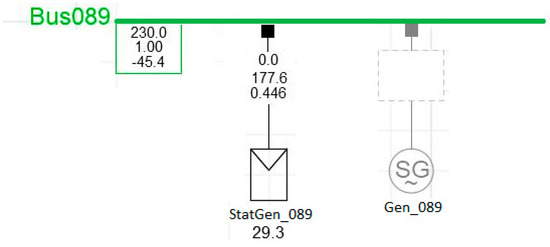
Figure 3.
An example of test network modifications at bus 89.
Table 2.
Overview of generated FDE scenarios.
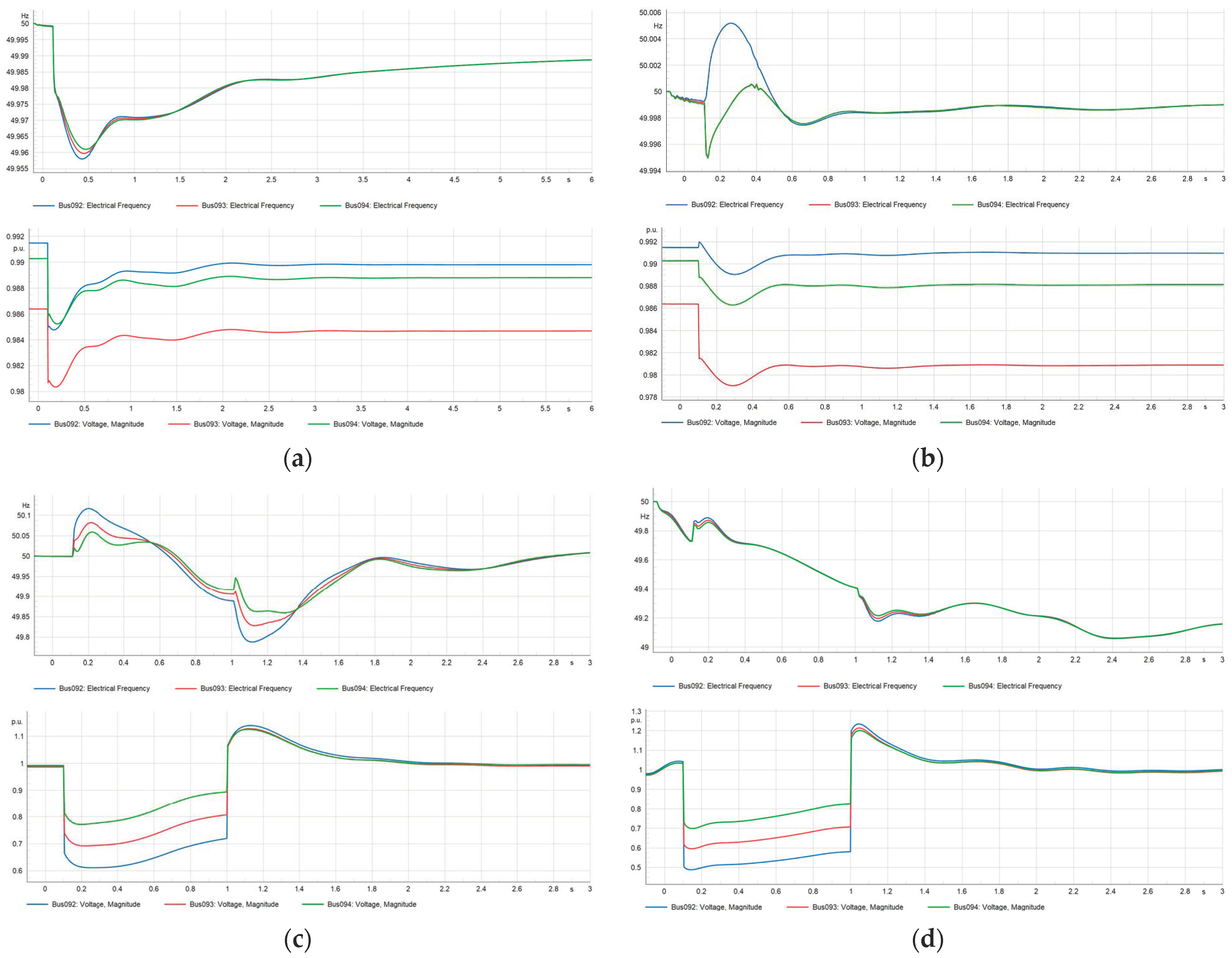
The produced datasets were separated into training (75%) and test sets (25%). Finally, to test the robustness of FDE detection, the same scenarios were run in the network with high penetration of renewables. Examples of created FDEs can be seen in Figure 4. For each class of FDEs, the monitored variables were bus frequency and bus voltage at Bus 92, 93, and 94. However, in the training process all four variables (including ROCOF and RAS) were used as they show distinctive pre- and post- event behaviors that make ANNs pattern recognition outstanding.
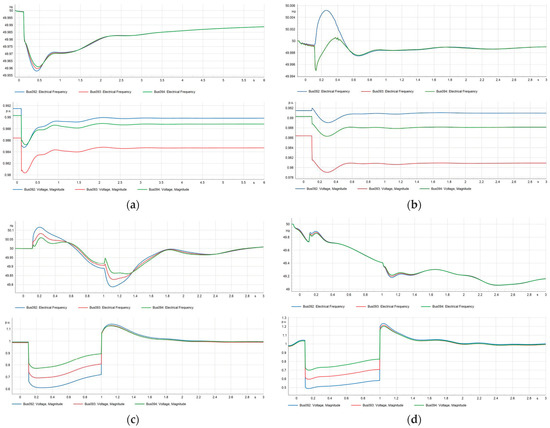
Figure 4.
Examples of generated FDEs: (a) load step change event, (b) line 92_93 outage event, (c) short circuit event at Bus 91, (d) short circuit event at Bus 91 with high renewable penetration.
The easiest pattern to process is assumed to be ROCOF due to the obvious abrupt pattern changes, and training for ROCOF may be faster, whereas the other three parameters may require more sample size to achieve good accuracy. Furthermore, the addition of static generators creates additional patterns which may exacerbate the AI learning capabilities of the neural networks. As can be seen in Figure 4d), the post-disturbance pattern differences are more subtle as quasi steady-state frequency deviates strongly, and detecting this behavior would be challenging.
6. Results
The performance of the proposed methodology was measured in terms of training and validation set accuracy. After the training process, the FDE detection method was examined with respect to accuracy and speed. The latter is primarily influenced by the number of required recording points and the size of the examined data window. To test the results, 100 recording points were used, divided into 20 pre- and 80-post disturbance points. Therefore, the data window was calculated as 2 s, since PMU reporting rate in the dataset was 50 Hz. The resulting accuracies in terms of the four input variable features are given in Table 3.
Table 3.
FNN-based FDE detection accuracy.
According to the table, the FNN-based method has shown a remarkable detection accuracy across all input variables. This is the most evident when the input is bus voltage magnitude and ROCOF, but frequency and RAS also display a very satisfactory performance. However, in the case of modified grid, the high penetration of renewables caused frequency and bus voltage response patterns which FDE was not able to accurately predict. For certain input types, such as RAS, it could be seen that as the test system becomes more complex, the obtained performance becomes profoundly worse. For a more accurate result, a bigger input sample size or more recording points would be needed.
It is also evident that using a significantly smaller number of recording points will certainly lead to worse results for all variables except the ROCOF, as even a fairly small number of points contains a sufficient number of extracting features.
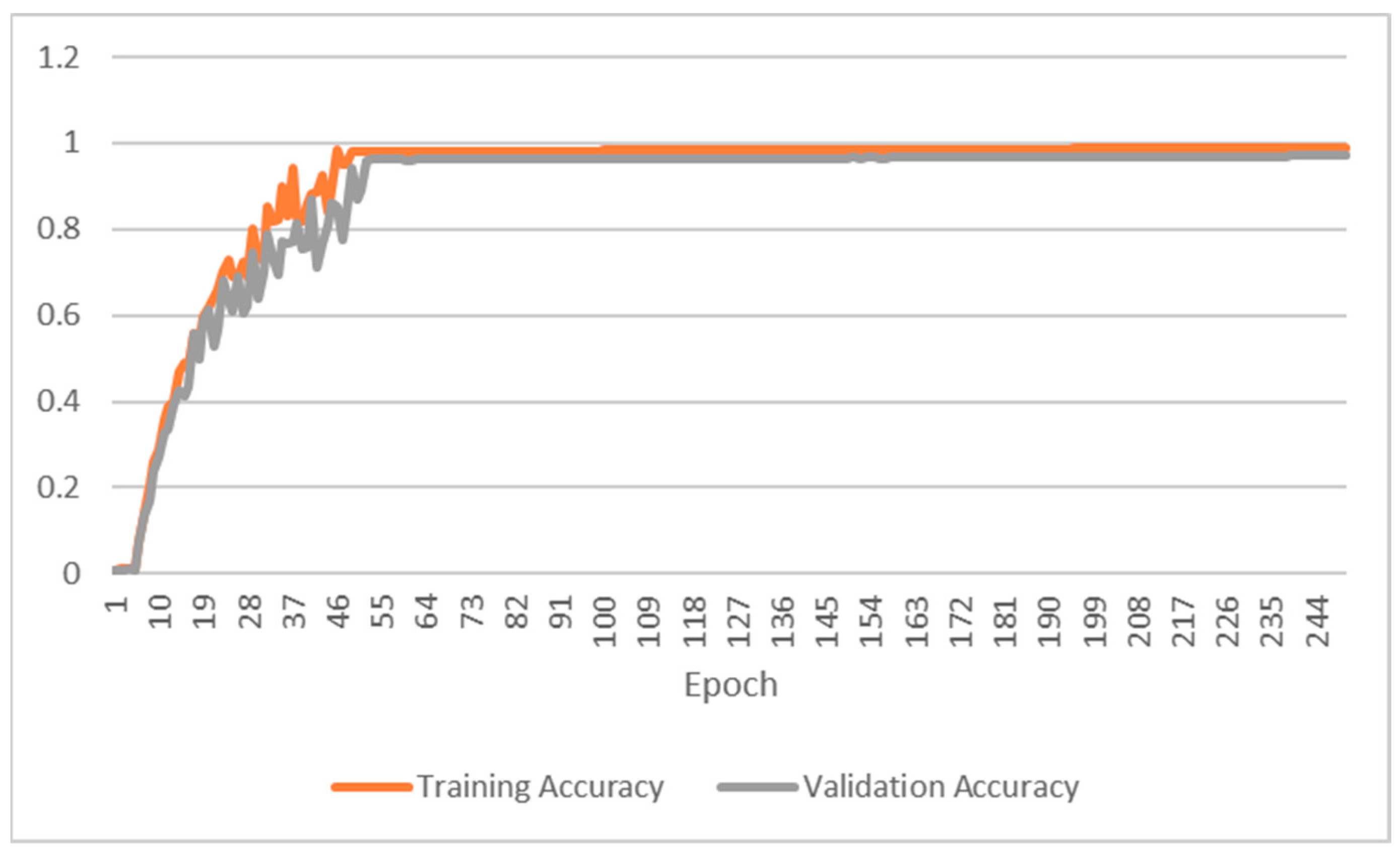
When the training and validation accuracy error convergence is analyzed, in Figure 5 for the modified grid, it can be seen that the optimum accuracies were reached in about 60 epochs, which is considerably faster than the previously mentioned benchmark model. However, if fewer points were used, the speed of convergence would have been improved. Hence, there is a trade-off between the input complexity and the FDE classifier performance.
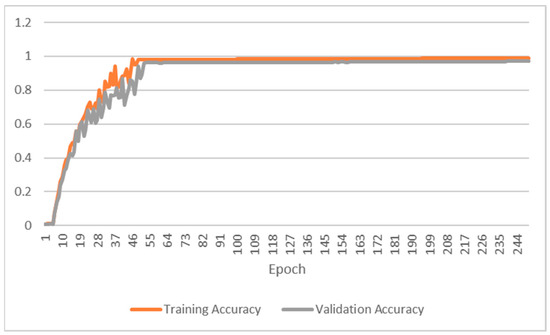
Figure 5.
Convergence of training and validation set accuracy.
7. Conclusions
This paper proposed the notion of using dynamic state estimation with deep-learning techniques based on feed-forward artificial neural networks to accurately predict frequency disturbances caused by line outages, load/generation tripping events, and various types of faults. The proposed methodology was tested on a test grid model with high penetration of renewable generation, using an open-source data generator. The performance of the suggested methodology was measured with respect to the accuracy and computational speed of convergence. It was concluded that DL-based DSE can be successfully utilized in the FDE detection process to improve frequency monitoring and control, and to maintain optimal performance, stability, and security of power systems. Nevertheless, research on this matter is extremely limited and more studies are needed in the future. The future work will involve further efforts on enhancing visibility and detection of converter-induced instability.
Author Contributions
Conceptualization, S.Ć.; Methodology, S.Ć.; Validation, S.Ć.; Investigation, S.Ć.; Data Curation, S.Ć.; Writing—Original Draft Preparation, S.Ć.; Writing—Review & Editing, I.V.; Supervision, I.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Monticelli, A. State Estimation in Electric Power Systems. A Generalized Approach; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Liu, Y.; Singh, A.K.; Zhao, J.; Meliopoulos, A.S.; Pal, B.; bin Mohd Ariff, M.A.; Van Cutsem, T.; Glavic, M.; Huang, Z.; Kamwa, I.; et al. Dynamic State Estimation for Power System Control and Protection IEEE Task Force on Power System Dynamic State and Parameter Estimation. IEEE Trans. Power Syst. 2021, 36, 5909–5921. [Google Scholar] [CrossRef]
- Miller, W.L.; Lewis, J.B. Dynamic State Estimation in Power Systems. IEEE Trans. Automat. Contr. 1971, 16, 841–846. [Google Scholar] [CrossRef]
- Singh, A.K.; Pal, B.C. Rate of Change of Frequency Estimation for Power Systems Using Interpolated DFT and Kalman Filter. IEEE Trans. Power Syst. 2019, 34, 2509–2517. [Google Scholar] [CrossRef]
- Anagnostou, G.; Pal, B.C. Derivative-Free Kalman Filtering Based Approaches to Dynamic State Estimation for Power Systems with Unknown Inputs. IEEE Trans. Power Syst. 2017, 33, 116–130. [Google Scholar] [CrossRef]
- Afrasiabi, S.; Afrasiabi, M.; Rastegar, M.; Mohammadi, M.; Parang, B.; Ferdowsi, F. Ensemble Kalman Filter based Dynamic State Estimation of PMSG-based Wind Turbine. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Xie, W.; Huang, Z.; He, W.; Wang, K. A Square Root Cubature Kalman Filter Based Dynamic State Estimation of Distribution Network. In Proceedings of the 2020 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Weihai, China, 13–15 July 2020; pp. 497–501. [Google Scholar] [CrossRef]
- Sun, Z.; Chen, Y. Dynamic State Estimation of DFIG Using Square-Root Cubature Kalman Filter. In Proceedings of the 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS), Suzhou, China, 14–16 May 2021; pp. 784–789. [Google Scholar] [CrossRef]
- Li, G.; Niu, D.; Song, E. A Multiple-Model State Estimator based on the Unscented Kalman Filter. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3011–3016. [Google Scholar] [CrossRef]
- Sun, K.; Qi, J.; Kang, W. Power system observability and dynamic state estimation for stability monitoring using synchrophasor measurements. Control Eng. Pract. 2016, 53, 160–172. [Google Scholar] [CrossRef]
- Chowdhury, A.; Chatterjee, S.; Dey, A. Power Systems Dynamic State Estimation using Central Difference Filter. In Proceedings of the 2022 Second International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 1–3 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Cevallos, H.; Intriago, G.; Plaza, D. Performance of the Estimators Weighted Least Square, Extended Kalman Filter, and the Particle Filter in the Dynamic Estimation of State Variables of Electrical Power Systems. In Proceedings of the 2018 IEEE International Conference on Automation/XXIII Congress of the Chilean Association of Automatic Control (ICA-ACCA), Concepcion, Chile, 17–19 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Tian, G.; Zhou, Q.; Birari, R.; Qi, J.; Qu, Z. A Hybrid-Learning Algorithm for Online Dynamic State Estimation in Multimachine Power Systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5497–5508. [Google Scholar] [CrossRef] [PubMed]
- Akhlaghi, S.; Zhou, N.; Huang, Z. A Multi-Model Adaptive Kalman Filtering Approach to Power System Dynamic State Estimation. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Cosic, S.; Vokony, I. Artificial Neural Networks—Based Method for Enhancing State Estimation of Grids with High Penetration of Renewables. Renew. Energy Power Qual. J. 2022, 20, 488–493. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Huang, Z.; Yu, S.S.; Gómez-Expósito, A.; Wang, S.; Kamwa, I.; Akhlaghi, S.; Mili, L.; Terzija, V.; et al. Roles of dynamic state estimation in power system modeling, monitoring and operation. IEEE Trans. Power Syst. 2021, 36, 2462–2472. [Google Scholar] [CrossRef]
- Gotti, D.; Ledesma, P.; Amaris, H. Comparative Analysis between State Estimation Algorithms under Static and Dynamic Scenarios. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Z.; Jin, S.; Li, A. Computing for power system operation and planning: Then, now, and the future. iEnergy 2022, 1, 315–324. [Google Scholar] [CrossRef]
- Gotti, D.; Ledesma, P.; Amaris, H. A fast data-driven topology identification method for dynamic state estimation applications. Int. J. Electr. Power Energy Syst. 2023, 147, 108807. [Google Scholar] [CrossRef]
- Farantatos, E.; Huang, R.; Cokkinides, G.J.; Meliopoulos, A.P. A Predictive Generator Out-of-Step Protection and Transient Stability Monitoring Scheme Enabled by a Distributed Dynamic State Estimator. IEEE Trans. Power Deliv. 2016, 31, 1826–1835. [Google Scholar] [CrossRef]
- Zhao, J.; Tang, Y.; Terzija, V. Robust Online Estimation of Power System Center of Inertia Frequency. IEEE Trans. Power Syst. 2019, 34, 821–825. [Google Scholar] [CrossRef]
- Anagnostou, G.; Boem, F.; Kuenzel, S.; Pal, B.C.; Parisini, T. Observer-Based Anomaly Detection of Synchronous Generators for Power Systems Monitoring. IEEE Trans. Power Syst. 2018, 33, 4228–4237. [Google Scholar] [CrossRef]
- Sankaran, C. Power Quality; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Electricity Consumers Resource Council (ELCON). The Economic Impacts of the August 2003 Blackout. 2004. Available online: https://elcon.org/wp-content/uploads/Economic20Impacts20of20August20200320Blackout1.pdf (accessed on 17 July 2023).
- Coelho, R.d.A.; Brito, N.S.D. Power Measurement Using Stockwell Transform. IEEE Trans. Power Deliv. 2021, 36, 3091–3100. [Google Scholar] [CrossRef]
- Yadav, R.; Pradhan, A.K.; Kamwa, I. Real-Time Multiple Event Detection and Classification in Power System Using Signal Energy Transformations. IEEE Trans. Ind. Inform. 2019, 15, 1521–1531. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, C.; Jiang, Q.; Levron, Y.; Cai, G. Evaluating generator damping for wind-integrated power system in ambient conditions. IET Renew. Power Gener. 2022, 16, 300–312. [Google Scholar] [CrossRef]
- Shadi, M.R.; Ameli, M.-T.; Azad, S. A real-time hierarchical framework for fault detection, classification, and location in power systems using PMUs data and deep learning. Int. J. Electr. Power Energy Syst. 2022, 134, 107399. [Google Scholar] [CrossRef]
- Lopes, G.V.d.S.; Moraes, G.R.; Issicaba, D.; Dotta, D. WAMS-based two-level robust detection methodology of power system events. Sustain. Energy Grids Netw. 2022, 31, 100689. [Google Scholar] [CrossRef]
- Sun, Z.; Ram, M.; Jiang, C.; Wang, Q.; Michael, P.; Juri, B.; Yoash, L. PF-FEDG: An open-source data generator for frequency disturbance event detection with deep-learning reference classifiers. Energy Rep. 2023, 9, 397–413. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).