In this section, the results of the different studies are presented and discussed.
3.1. MUELS Method Performance at a Fixed TEV
For each forcing factor value, around 20 sets of parameters were input as equivalent linear systems into the DLG. While the return period for each forcing factor was the same, the zero-upcrossing period, and therefore the TEV, changed.
Figure 11,
Figure 12 and
Figure 13 show the contours for each forcing factor.
As seen in
Figure 11,
Figure 12 and
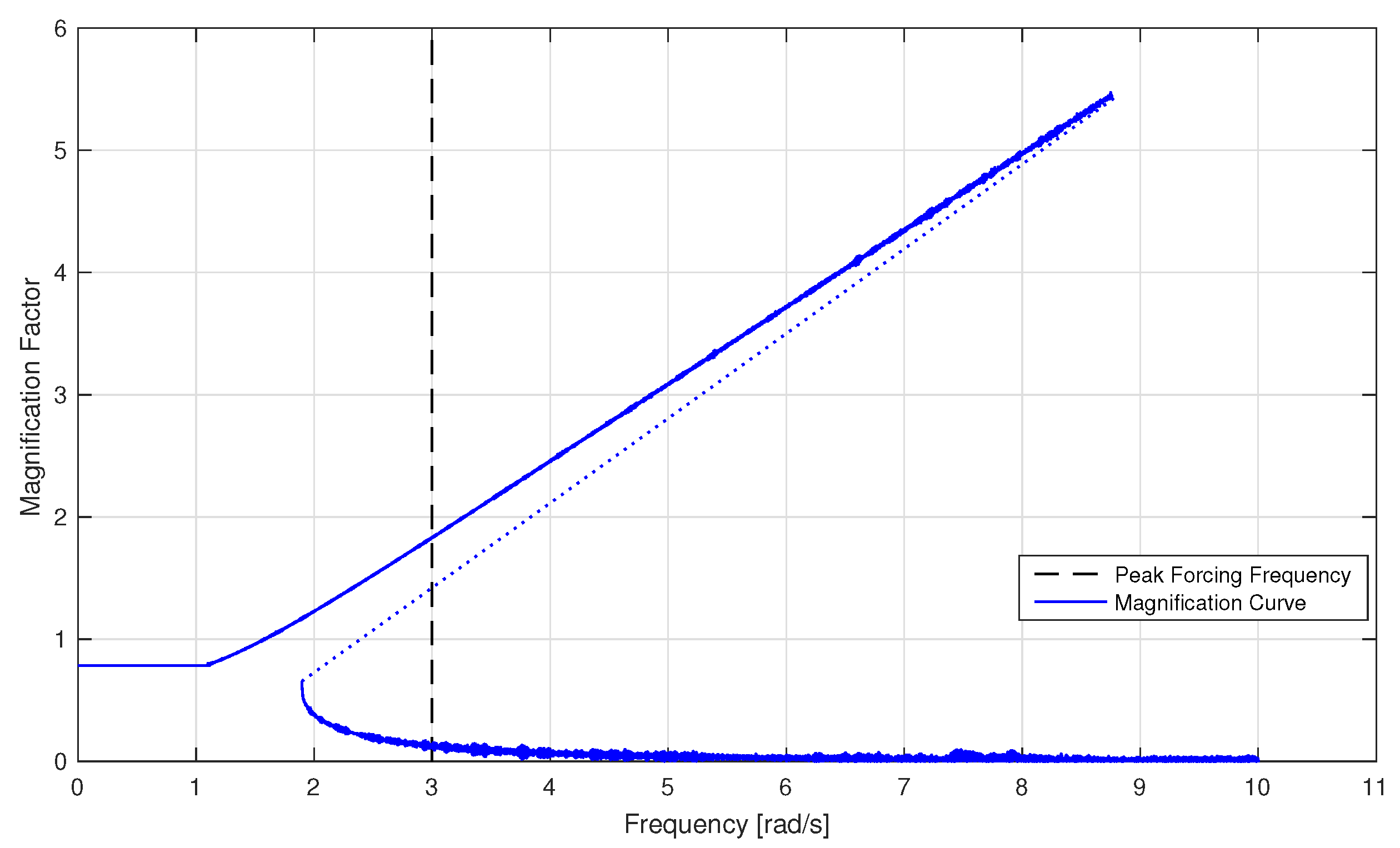
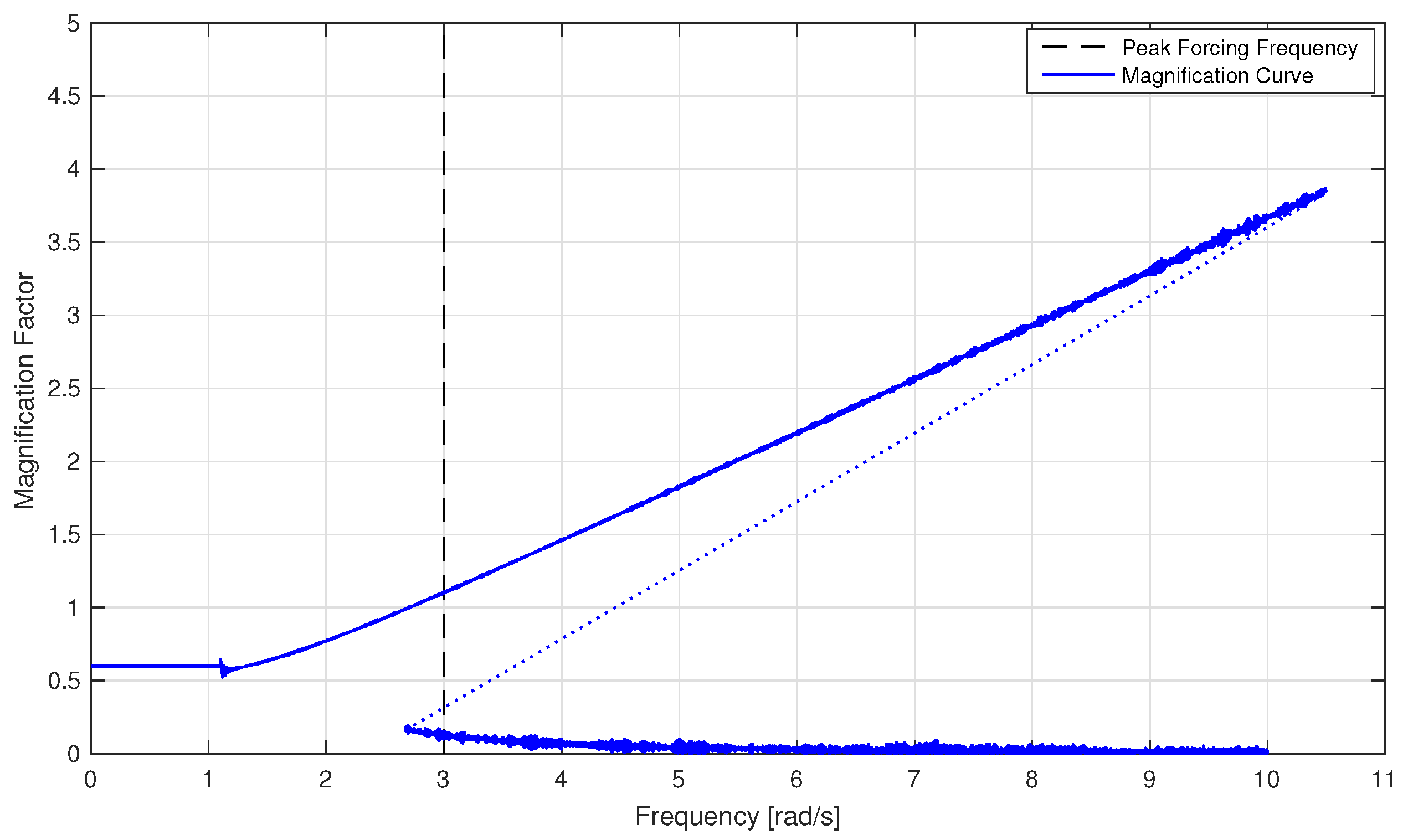
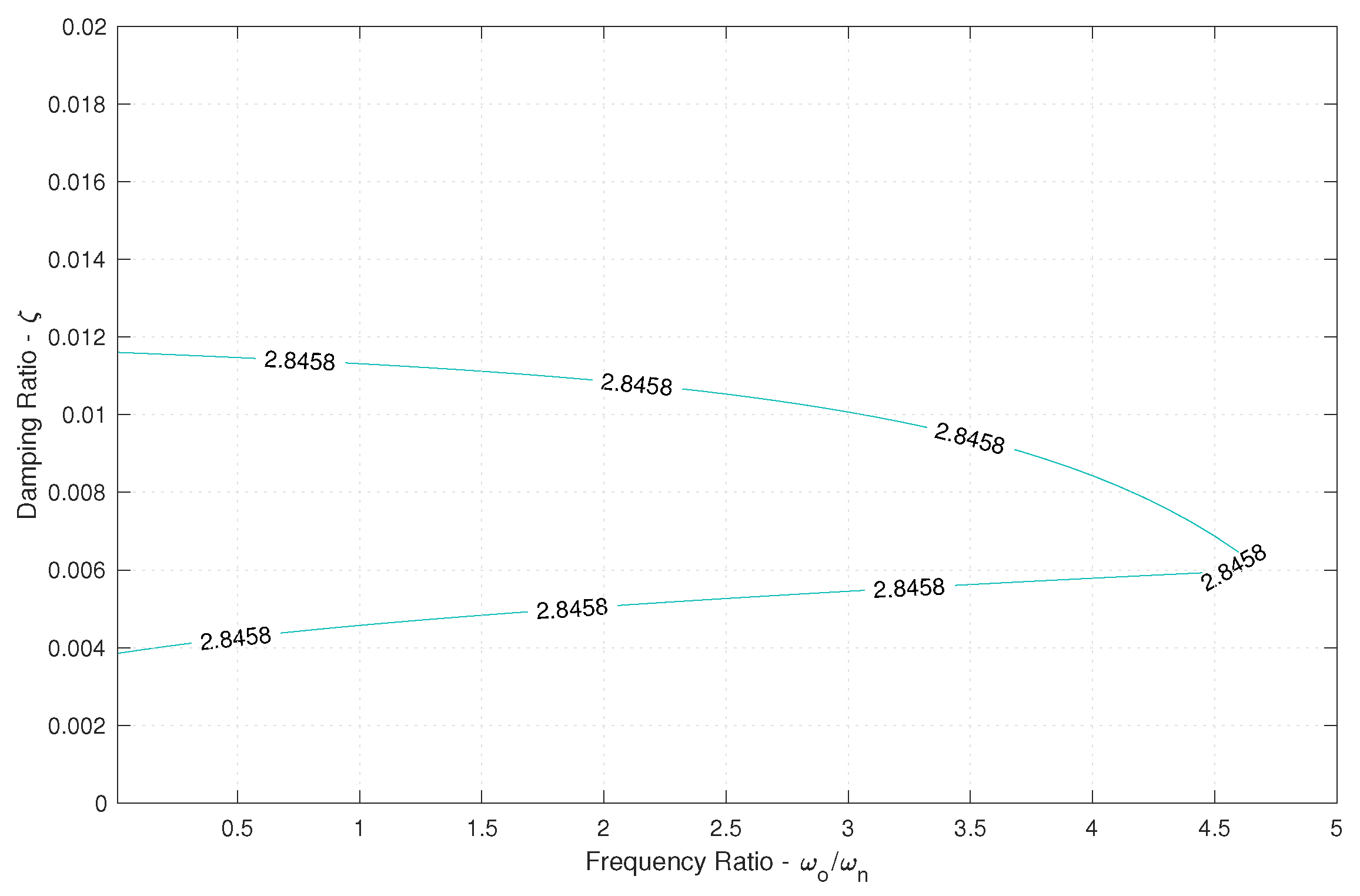
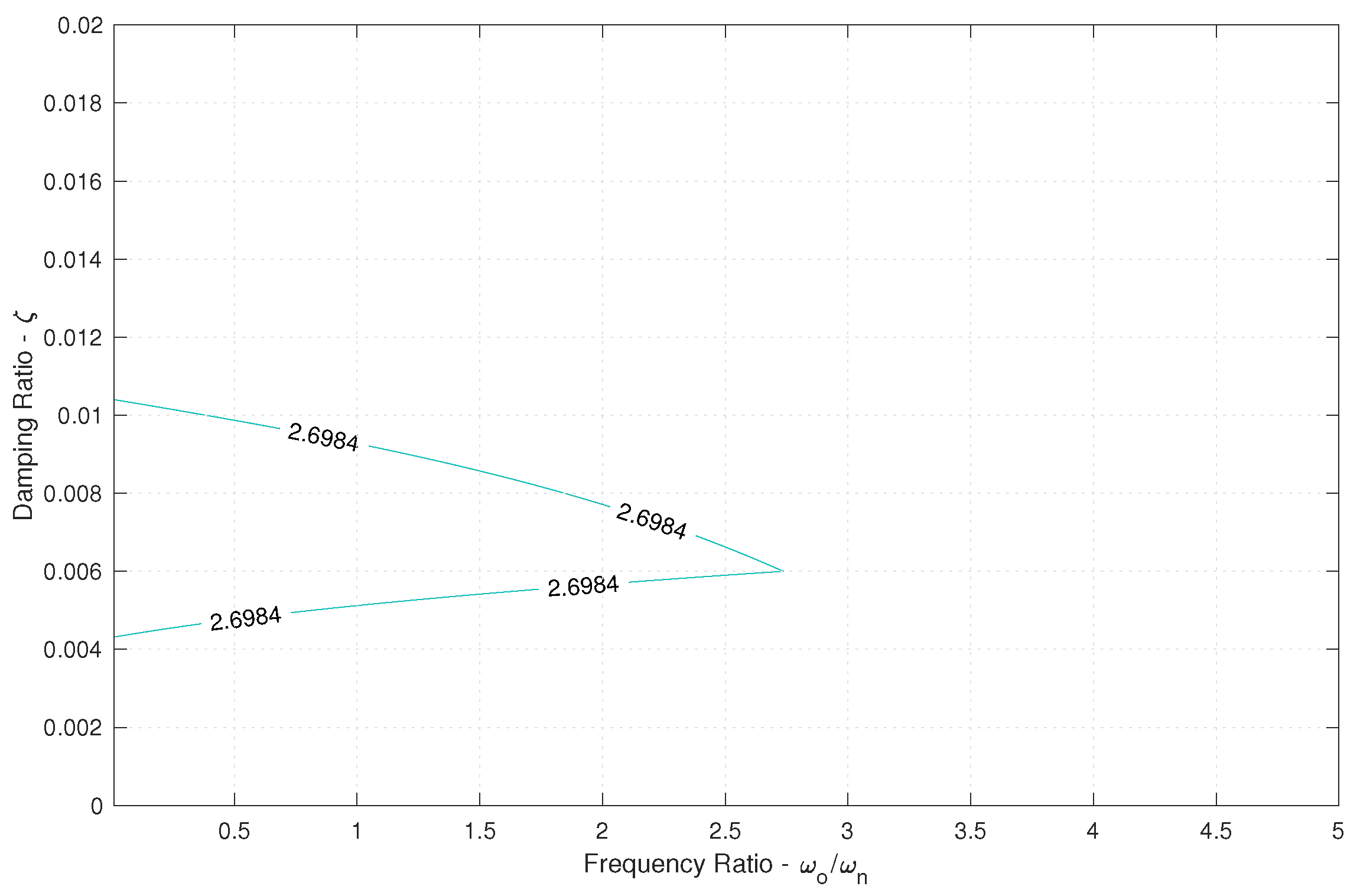
Figure 13, increasing the forcing factor shifts the contour to the left. As the Duffing oscillators become more and more non-linear and non-stationary due to the increased forcing factor, there are fewer equivalent linear systems available to represent the Duffing oscillators. As such, the probability that there exists a linear system that shares inputs that lead to extremes with the non-linear system of interest decreases. The parameters from these contours are sampled such that about 20 sets of parameters were selected for input into the DLG for the purpose of simplicity and speed. Furthermore, the bulk of these sets of parameters fall near the bend in the contours, at frequency ratio values above 1.0. The majority of resulting natural frequencies fall below 1.0 rad/s, which may have an effect on the performance of the MUELS method due to the distance between the ELS natural frequencies and the peak forcing frequency. While it is possible that increasing this discretization, i.e., using more parameter sets from around the contour, would increase accuracy and performance, only around 20 parameter sets from each contour were used for this paper.
Table 3 outlines the TEV and selected parameters for each forcing factor. The parameter selection process is detailed in
Section 2.4.
The linear natural frequencies and resulting transfer functions selected have little overlap with the energy from the input spectrum. Further investigations into the importance of prioritizing systems whose transfer functions overlap more with the input spectrum will be considered in future work.
One of the major benefits of the MUELS method is the increase in computational efficiency compared to Monte Carlo simulations. In this application, a single MUELS running for each forcing factor, including gathering training data and producing 1000 realizations, took 14,705 s on a quad-core processor. To produce 4000 Monte Carlo simulations for the same return period of 58 h took 144,840 s on eight cores. While there were more MCS produced, generating an equivalent number of MUELS realizations would add around 900 s per parameter set, or about 18,000 s for an entire MUELS run.
The current configuration of MUELS, which takes about 10–15% of the time of Monte Carlo simulations, allows for some increase in fidelity at the cost of computational effort. One area that could improve the accuracy of the MUELS method would be, as mentioned earlier, a finer discretization of the contour to examine more parameter sets.
Figure 14,
Figure 15 and
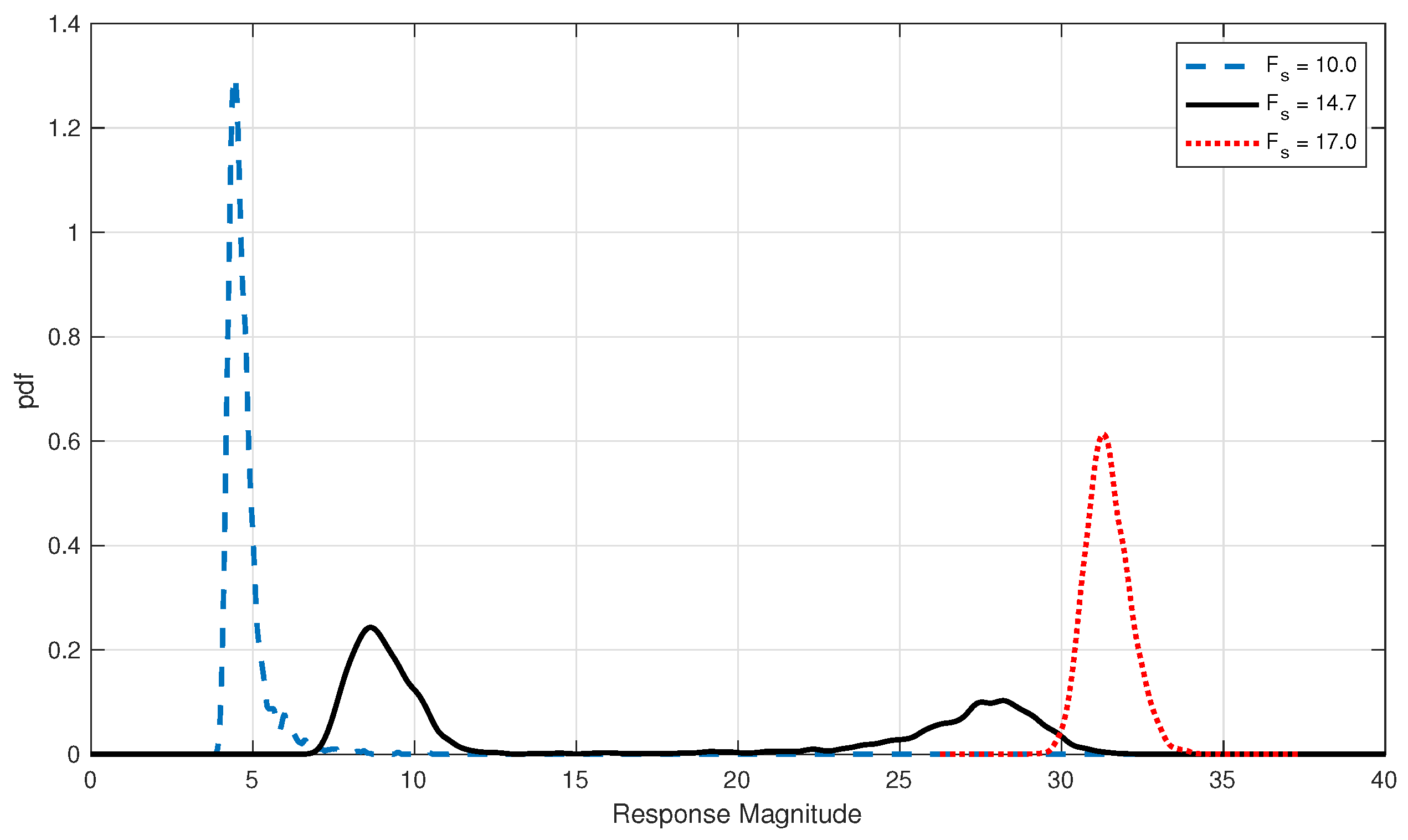
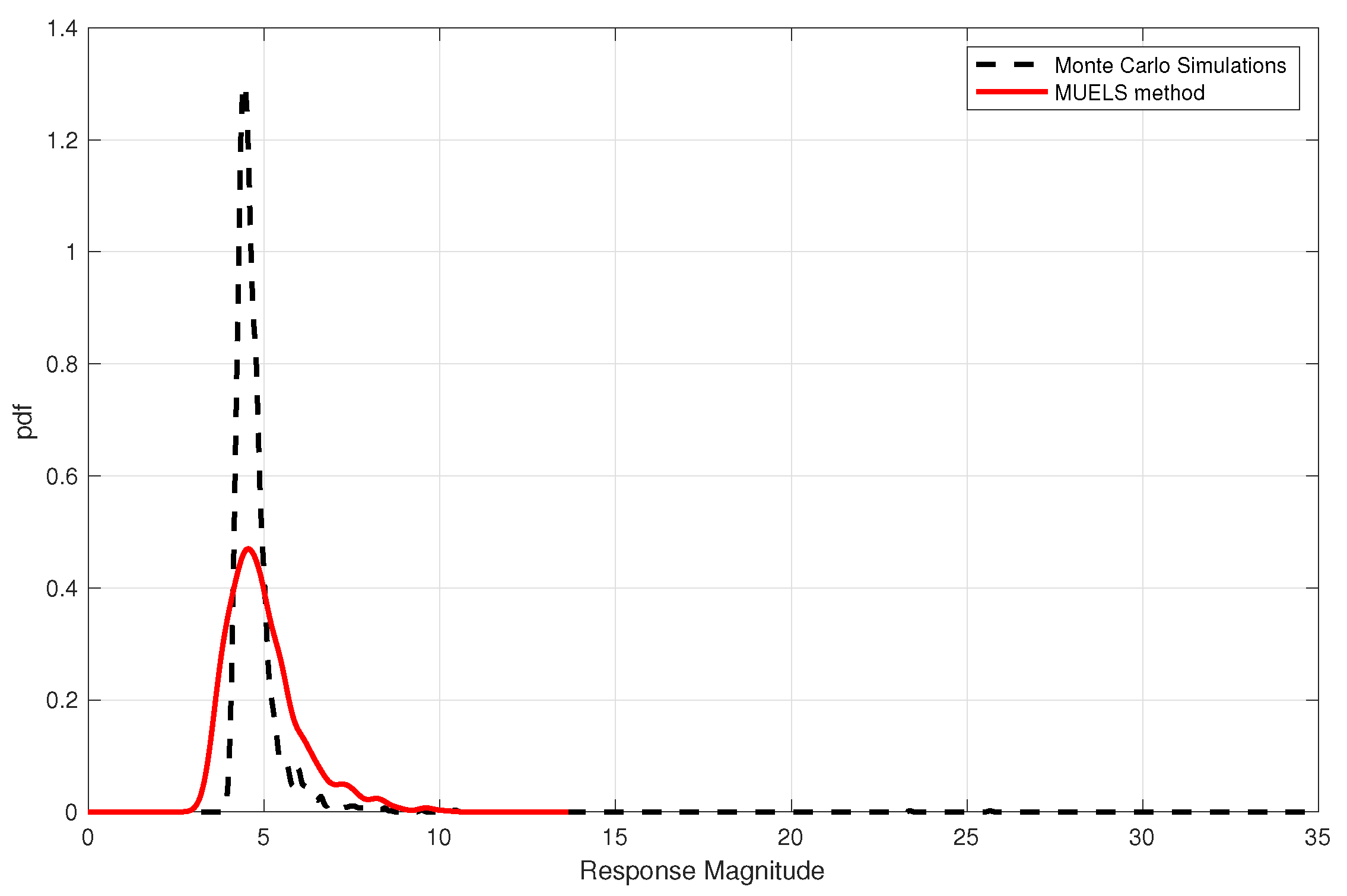
Figure 16 show the selected MUELS extreme PDF and the extreme Monte Carlo PDF for each forcing factor. Note that each PDF was generated using a kernel density estimator.
In the
case in
Figure 14, the MUELS method extreme PDF predicted the most probable maximum of the Monte Carlo simulations well. The MUELS method PDF has a larger standard deviation than the MCS PDF but has a large amount of overlap and, therefore, valid extreme realizations.
The MUELS method was able to recover the two attractors in the case successfully. The under-prediction here could be the result of the TEV, given the levels of non-linearity that were introduced or since there are now essentially two return periods to examine: that of the small attractor and that of the large attractor. While the MUELS method does under-predict the MCS in the most probable maxima of both attractors, there is still a good amount of overlap that can provide valid extreme realizations.
In the case, the MUELS method retained some realizations that did not contain excursions. Furthermore, the amount of overlap between the MUELS method PDF and the Monte Carlo PDF is reduced even more.
The immediately evident and important characteristic of the
PDF is the bi-modality, while the
and
cases exhibit uni-modality in the smaller domain of attraction and larger domain of attraction, respectively. The most obvious comparison we can make between the MCS and MUELS method is the x-value location of the peaks and the area of each of the peaks. It should be reiterated that each peak is representative of a different domain of attraction, as indicated in
Section 2.2. As such, the area and the x-value of the maximum of each peak were used to compare the MUELS method with the Monte Carlo simulations.
Table 4 shows the specified characteristics of the extreme MCS and MUELS PDFs and the mean absolute percentage error between the two.
There were a limited number of excursions in the
Monte Carlo simulations, which is not reflected in the significant figures shown. That being said, the performance of the MUELS method for
produced results nearly identical to MCS. This was expected, as the
case is nearly linear, which resulted in a closer match between the ELS and the actual oscillator. While the MUELS PDF had more variance, as seen in
Figure 14, this provides a solid foundation to produce an infinite number of extreme realizations at any return period of interest.
For , the MUELS method under-predicts the MCS in both peak x-value and number of simulations with excursions. The under-prediction could be due to the MUELS method reaching the non-linearity limits or it could be due to the TEV selection. For this section, the TEV was determined simply by using the return period of 58.3 h and the zero-upcrossing period for each forcing factor. It is important to reiterate that the TEV becomes less meaningful as more non-linearity is introduced. The TEV is still a good starting point but cannot be expected to produce accurate results without any changes made to account for non-linearity.
For , the MUELS method under-predicted the MCS again. In fact, there were a number of DLG inputs that did not result in an excursion in the 100-second realization. The under-prediction here is most likely the result of both TEV selection and reaching the non-linear limits of the MUELS method. Despite this, the large attractor x-value of the peak fell within 20% of the MCS most probable maximum and there are a number of realizations that overlap with the Monte Carlo extreme PDF. In practice, the amount of overlap would not be known, but schemes are being developed to form an acceptance–rejection method based on extreme value theory and knowledge of the system, which will enable one to estimate the amount of overlap between the true extreme value distribution and the extreme PDF from the MUELS method.
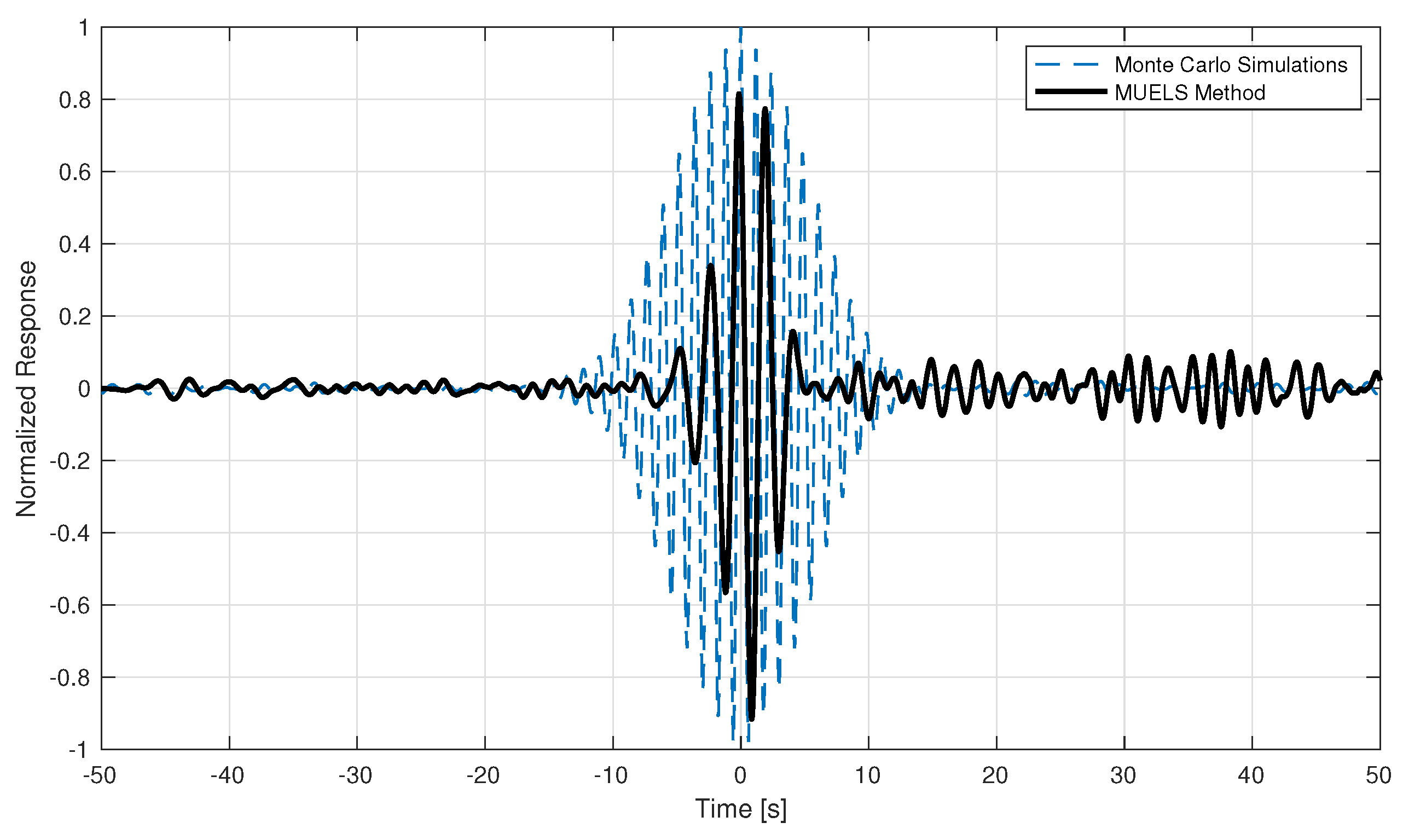
3.2. Time Series Comparison
One of the major benefits of the MUELS method is the ability to produce any number of time series realizations that lead to an extreme response. It should be reiterated that the difference between just running Monte Carlo simulations and the MUELS method is that the MUELS method uses the DLG to produce multiple sets of input realizations from different equivalent linear systems of relatively short length. After the equivalent linear system parameters are selected, the DLG is capable of producing many realizations for that set of linear parameters that potentially lead to extremes in the non-linear system of interest. That being said, it is important to compare the MUELS method time series with Monte Carlo simulations to ensure that the time series have the similar characteristics near extremes. The phase sampling procedure in the DLG results in input time series that lead to linear extremes at
. Using the time series as input into the non-linear system will not necessarily result in an extreme or potential extreme at
and that is reflected in the ensemble average time series. The lag is more noticeable when compared to the Monte Carlo simulation ensemble average near extremes, which was set to have the extreme at
, so the magnitudes were scaled and normalized to match the relationship between the peak value of the largest attractor for the Monte Carlo simulations and the MUELS method.
Figure 17,
Figure 18 and
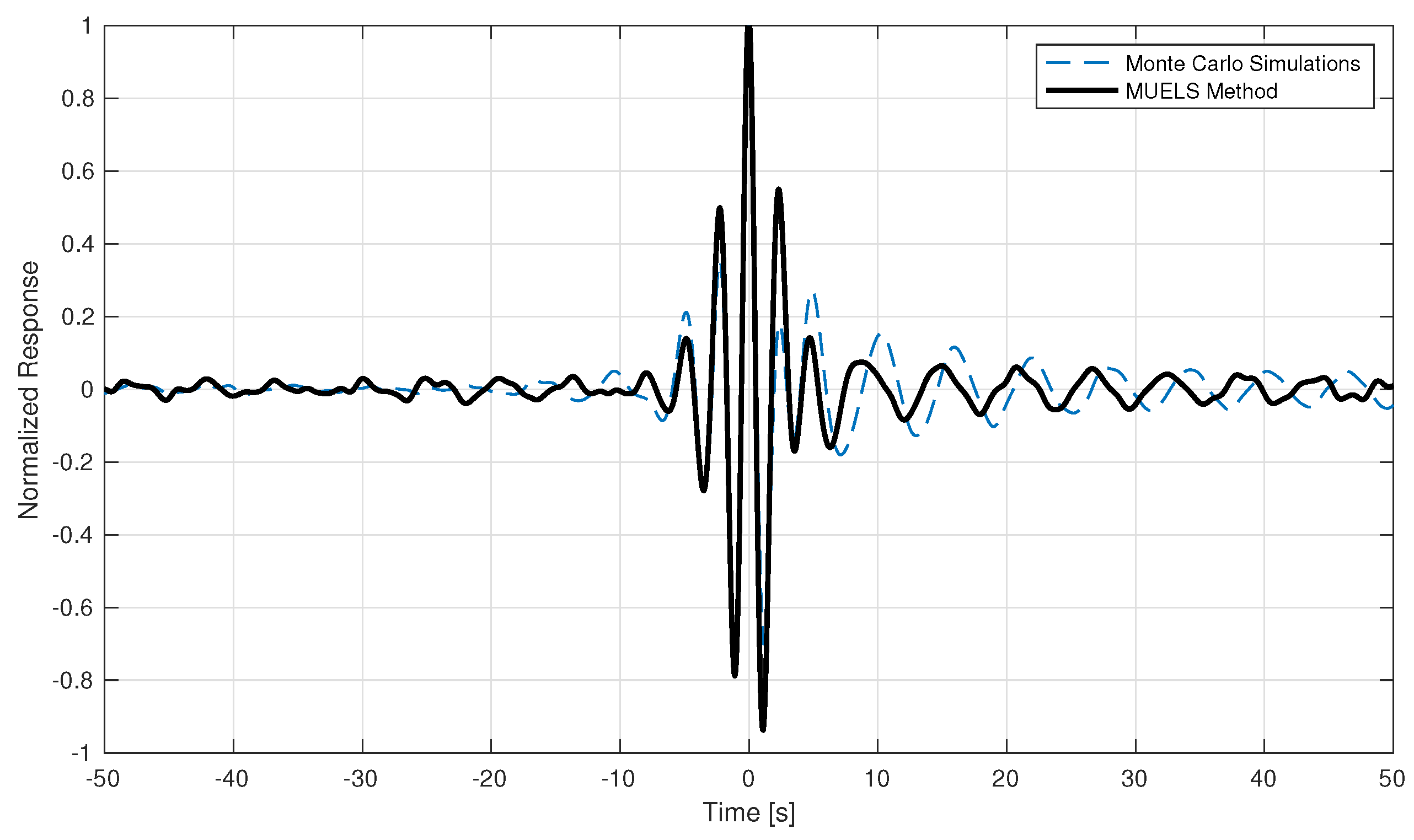
Figure 19 show these normalized ensemble averages near extremes for the Monte Carlo simulations and the MUELS method for each forcing factor.
In the case, the MUELS method and Monte Carlo simulations have very similar mean frequencies near and the magnitudes of the peaks leading up to the extreme value. Since the case is the most linear and, therefore, more immediately compatible with the DLG, it follows that it would produce time series that are closer to Monte Carlo simulations. It also seems to capture the dynamics shown in the Monte Carlo simulations further away from the extreme.
In the case, the MUELS method ensemble average seems to have a lower characteristic frequency than the Monte Carlo simulations. This may be a result of the lag mentioned earlier as the zero-upcrossing period should remain constant due to the fact that the input time series are valid realizations of the input spectrum. It is also interesting to note that the minimum value of the MUELS method after the positive peak follows the behavior of the Monte Carlo simulations while having a larger magnitude than the positive maximum of the MUELS method.
In the case, the MUELS method again has a lower characteristic frequency than the MUELS method. The buildup to the maximum is not as gradual or symmetric, as shown in the Monte Carlo ensemble average, but again re-centering the MUELS time series would reduce some of these deviations.
A future comparison between the MUELS method and Monte Carlo simulations would center the MUELS ensemble average to have a clearer comparison between the magnitudes of the ensemble average between the MCS and MUELS method. While the re-centering would improve the MUELS method performance relative to the Monte Carlo simulations, there may be another point of improvement in the TEV selection.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}