
Novel Strain Sensor in Weft-Knitted Textile for Triggering of Functional Electrical Stimulation †
 ,
, 
 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
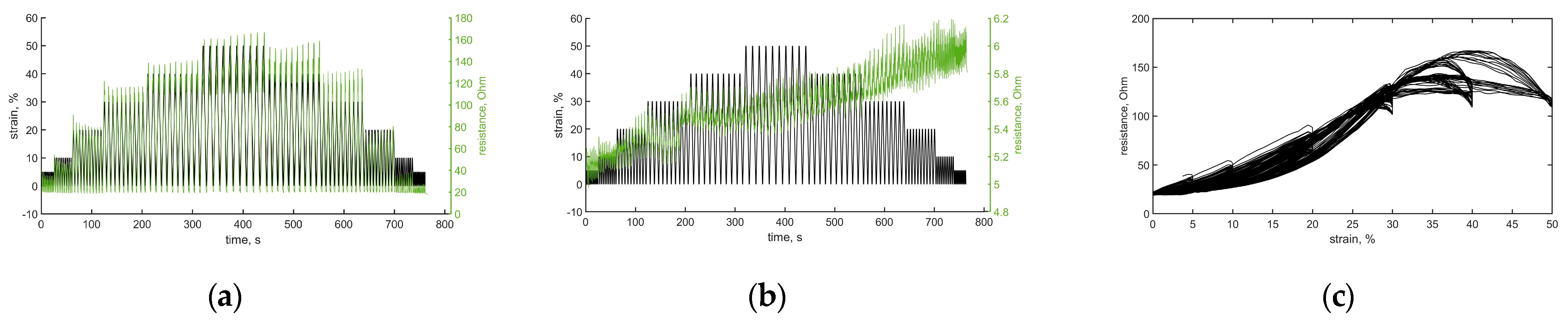
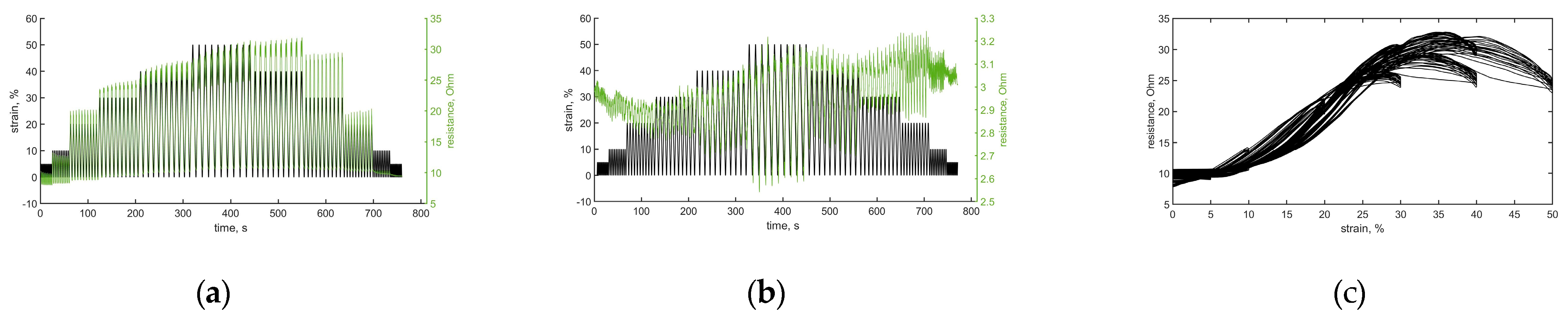
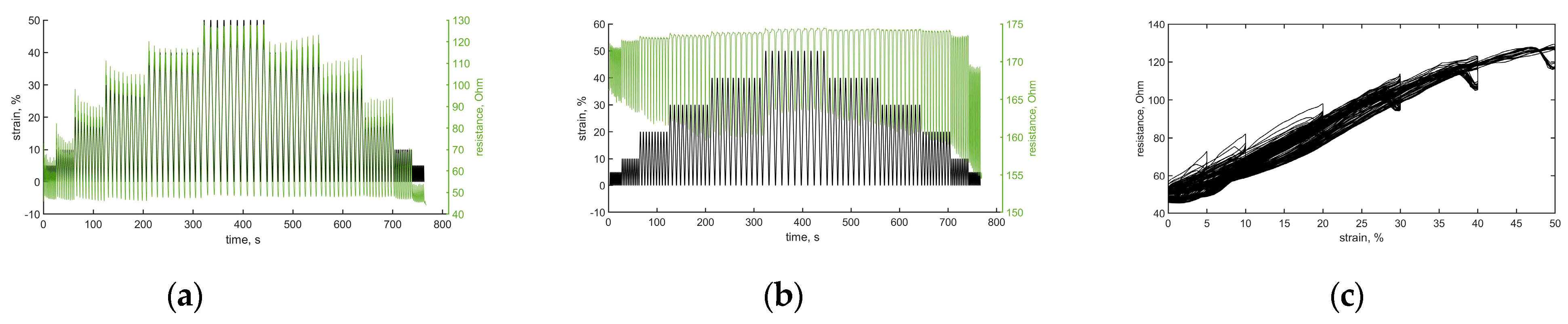
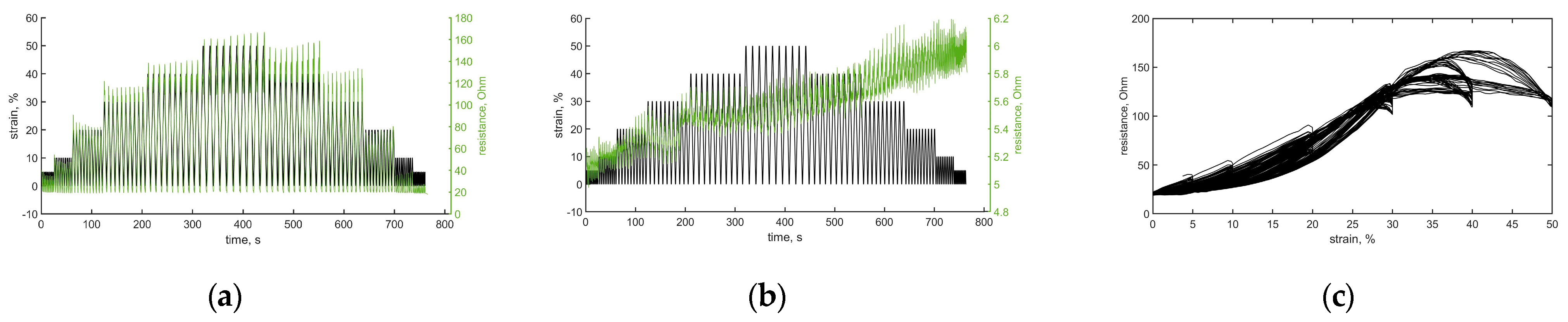
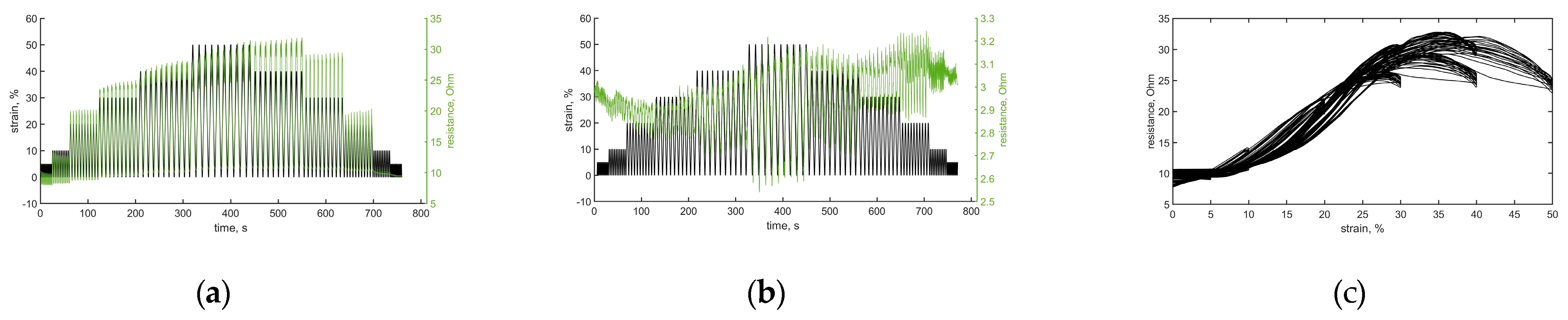
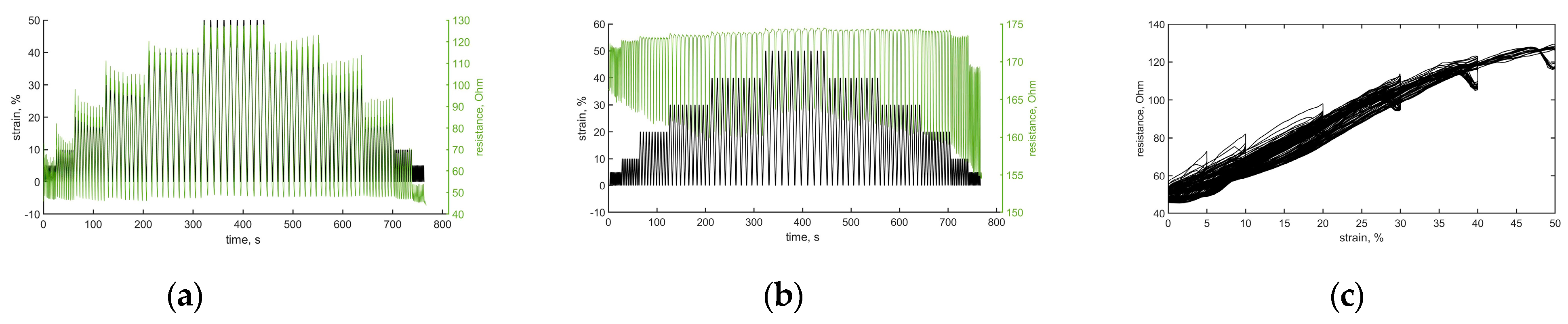
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Isaia, C.; Mcnally, D.S.; Mcmaster, S.A.; Branson, D.T. Effect of mechanical preconditioning on the electrical properties of knitted conductive textiles during cyclic loading. Text. Res. J. 2019, 89, 445–460. [Google Scholar] [CrossRef]
- Miller, L.; Mattison, P.; Paul, L.; Wood, L. The effects of transcutaneous electrical nerve stimulation (TENS) on spasticity in multiple sclerosis. Mult. Scler. 2007, 13, 527–533. [Google Scholar] [CrossRef] [PubMed]
- Gorman, P.H. An Update on Functional Electrical Stimulation after Spinal Cord Injury. Neurorehabilit. Neural Repair 2000, 14, 251–263. [Google Scholar] [CrossRef] [PubMed]
- Creasey, G.H.; Ho, C.H.; Triolo, R.J.; Gater, D.R.; DiMarco, A.F.; Bogie, K.M.; Keith, M.W. Clinical applications of electrical stimulation after spinal cord injury. J. Spinal Cord Med. 2004, 27, 365–375. [Google Scholar] [CrossRef] [PubMed]
- Hausdorff, J.M.; Ring, H. The effect of the L300 neuroprosthesis on gait stability and symmetry. J. Neurol. Phys. Ther. 2006, 30, 198–199. [Google Scholar] [CrossRef]
- Improved Mobility. Made Easier. Bioness Inc., NC 27703, United States: 2022. Available online: https://www.l300go.com/ (accessed on 21 November 2022).
- HELLER MEDIZINTECHNIK GmbH & Co. KG: Weak Foot Dorsi Flexion—Foot Drop System innoSTEP-WL Provides Mobility. Available online: https://www.heller-medizintechnik.de/produkte/innostep_wl/?lang=EN (accessed on 12 November 2022).
- Pro Walk Rehabilitationshilfen und Sanitätsbedarf GmbH: The WalkAide®—System. Myo-Orthetic Technology for the Treatment of Centrally Caused Foot Lift Weakness. Available online: https://www.prowalk.de/produkte/walkaide/ (accessed on 20 November 2022).
- Euler, L.; Guo, L.; Persson, N.-K. Textile Electrodes: Influence of Knitting Construction and Pressure on the Contact Impedance. Sensors 2021, 21, 1578. [Google Scholar] [CrossRef] [PubMed]
- Watson, A.; Sun, M.; Pendyal, S.; Zhou, G. TracKnee: Knee angle measurement using stretchable conductive fabric sensors. Smart Health 2020, 15, S.100092f. [Google Scholar] [CrossRef]
- Götz-Neumann, K. Understanding Walking—Gait Analysis in Physiotherapy, 4th ed.; Thieme; Georg Thieme Verlag: Stuttgart, Germany, 2016; ISBN 9783132401549. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Leg Position, Bent Angle | Length Knit Structure Li [cm] | Expected Strain εm = Li-Li-1/Li-1 [%] | |
|---|---|---|---|
| Basic length | L0 | 9.2 | - |
| Pre-stretched, unbent 0° | L1 | 12 | 23 |
| Bent by 45° | L2 | 15.1 | 26 |
| Bent by 90° | L3 | 16.3 | 36 |
| Full bent (140°) | L4 | 18 | 50 |
| Sensor Yarns (Red Area) | Binding Basic Knit and Material (Yellow Area) | Sensor Binding | |
|---|---|---|---|
| I: Silver-tech+ (Silver coated pol- yamide yarn; 150 tex) II: Elitex 235/f36 (Silver coated pol- yamide yarn) | Plated right left single jersey Tencel 25 tex plated with PA/EL single cover yarn 78/78f23x1 |  | Wale-wise plating of sensor yarns A: 4 wales × 200 courses B: 1 wale × 200 courses |
| course-wise plating of sensor yarns C: 100 wales × 4 courses D: 100 wales × 1 course | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abtahi, B.; Warncke, M.; Winger, H.; Sachse, C.; Häntzsche, E.; Nocke, A.; Cherif, C. Novel Strain Sensor in Weft-Knitted Textile for Triggering of Functional Electrical Stimulation. Eng. Proc. 2023, 30, 13. https://doi.org/10.3390/engproc2023030013
Abtahi B, Warncke M, Winger H, Sachse C, Häntzsche E, Nocke A, Cherif C. Novel Strain Sensor in Weft-Knitted Textile for Triggering of Functional Electrical Stimulation. Engineering Proceedings. 2023; 30(1):13. https://doi.org/10.3390/engproc2023030013
Chicago/Turabian StyleAbtahi, Bahareh, Mareen Warncke, Hans Winger, Carmen Sachse, Eric Häntzsche, Andreas Nocke, and Chokri Cherif. 2023. "Novel Strain Sensor in Weft-Knitted Textile for Triggering of Functional Electrical Stimulation" Engineering Proceedings 30, no. 1: 13. https://doi.org/10.3390/engproc2023030013
APA StyleAbtahi, B., Warncke, M., Winger, H., Sachse, C., Häntzsche, E., Nocke, A., & Cherif, C. (2023). Novel Strain Sensor in Weft-Knitted Textile for Triggering of Functional Electrical Stimulation. Engineering Proceedings, 30(1), 13. https://doi.org/10.3390/engproc2023030013