
Predication-Error-Based Intrinsically Motivated Saccade Learning †



{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Method
2.1. The PC/BC-DIM Neural Network
2.2. Inputs Encoding Method
2.3. Network Training Procedure
2.4. Network Testing Procedure
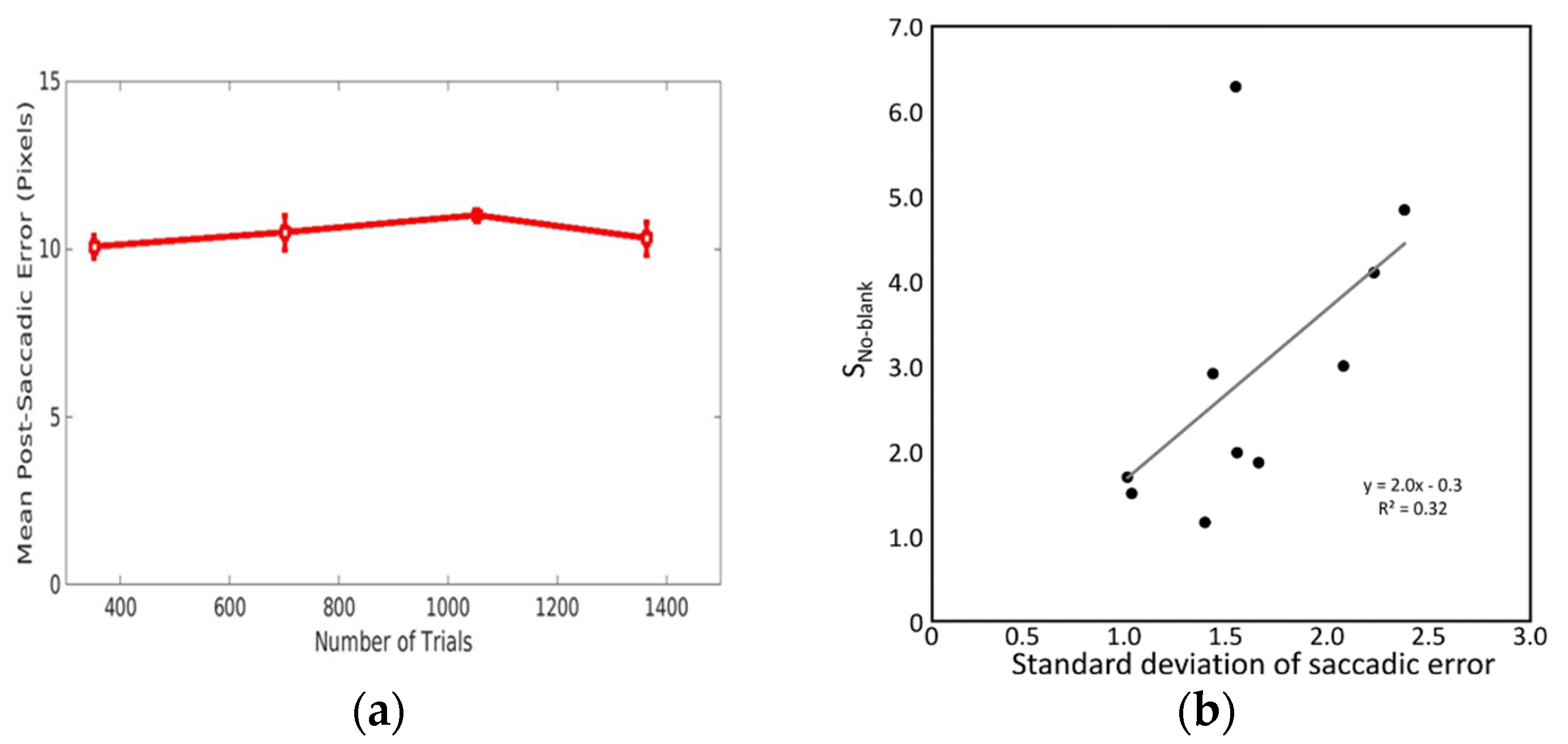
3. Results
Network Accuracy
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mirolli, M.; Baldassarre, G. Functions and mechanisms of intrinsic motivations. In Intrinsically Motivated Learning in Natural and Artificial Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 49–72. [Google Scholar]
- Caligiore, D.; Mustile, M.; Cipriani, D.; Redgrave, P.; Triesch, J.; Marsico, M.D.; Baldassarre, G. Intrinsic Motivations Drive Learning of Eye Movements: An Experiment with Human Adults. PLoS ONE 2015, 10, e0118705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muhammad, W.; Spratling, M.W. A neural model of binocular saccade planning and vergence control. Adapt. Behav. 2015, 23, 265–282. [Google Scholar] [CrossRef] [Green Version]
- Law, J.; Shaw, P.; Lee, M. A biologically constrained architecture for developmental learning of eye–head gaze control on a humanoid robot. Auton. Robot. 2013, 35, 77–92. [Google Scholar] [CrossRef]
- Rao, R.P.; Ballard, D.H. Predictive coding in the visual cortex: A functional interpretation of some extra-classical receptive-field effects. Nat. Neurosci. 1999, 2, 79–87. [Google Scholar] [CrossRef] [PubMed]
- Spratling, M.W.; De Meyer, K.; Kompass, R. Unsupervised learning of overlapping image components using divisive input modulation. Comput. Intell. Neurosci. 2009, 2009, 381457. [Google Scholar] [CrossRef] [PubMed]
- Takano, S.; Matsumiya, K.; Tseng, C.H.; Kuriki, I.; Deubel, H.; Shioiri, S. Displacement detection is suppressed by the post-saccadic stimulus. Sci. Rep. 2020, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, I.; Muhammad, W.; Asghar, A.; Irshad, M.J. Predication-Error-Based Intrinsically Motivated Saccade Learning. Eng. Proc. 2021, 12, 48. https://doi.org/10.3390/engproc2021012048
Ahmed I, Muhammad W, Asghar A, Irshad MJ. Predication-Error-Based Intrinsically Motivated Saccade Learning. Engineering Proceedings. 2021; 12(1):48. https://doi.org/10.3390/engproc2021012048
Chicago/Turabian StyleAhmed, Ihsan, Wasif Muhammad, Ali Asghar, and Muhammad Jehanzeb Irshad. 2021. "Predication-Error-Based Intrinsically Motivated Saccade Learning" Engineering Proceedings 12, no. 1: 48. https://doi.org/10.3390/engproc2021012048
APA StyleAhmed, I., Muhammad, W., Asghar, A., & Irshad, M. J. (2021). Predication-Error-Based Intrinsically Motivated Saccade Learning. Engineering Proceedings, 12(1), 48. https://doi.org/10.3390/engproc2021012048