
Mechanically Flexible Fluid Flow Sensor for Macro-Tubular Architectures †

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
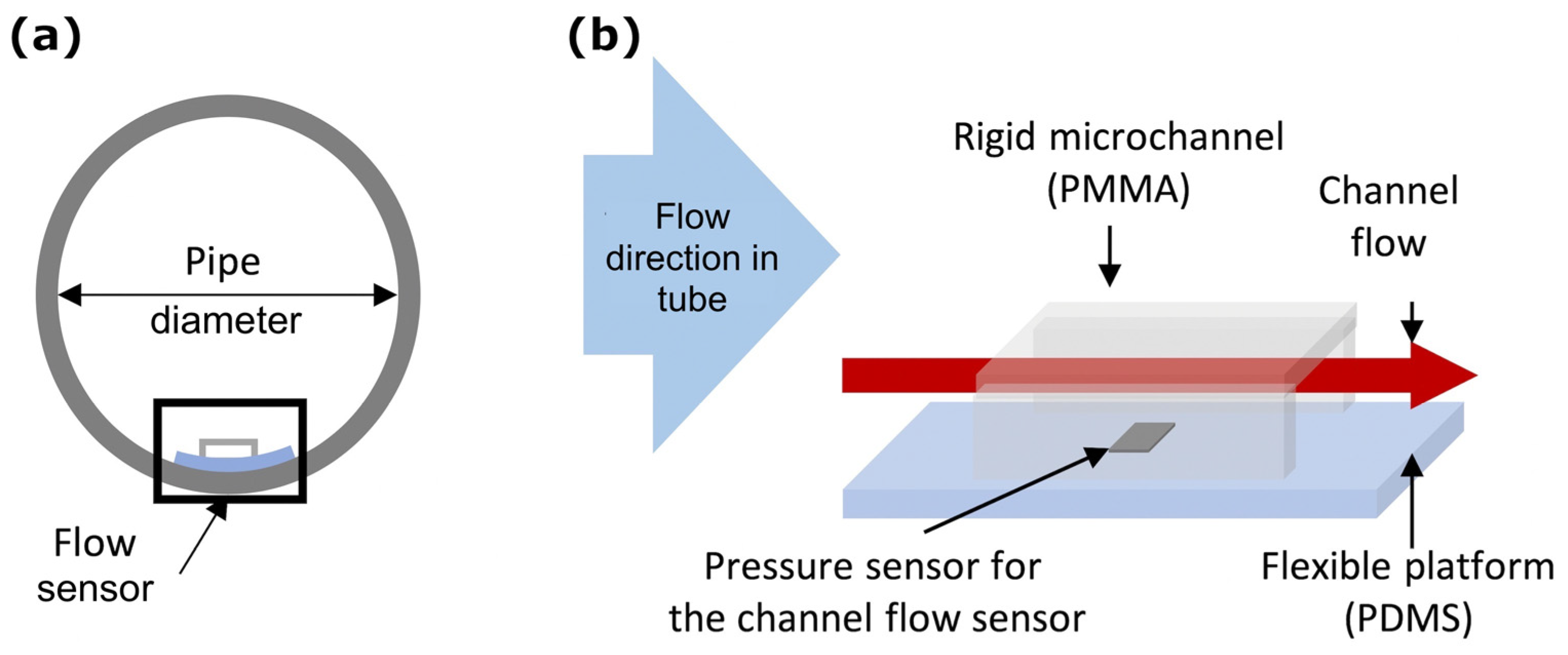
2. Materials and Design
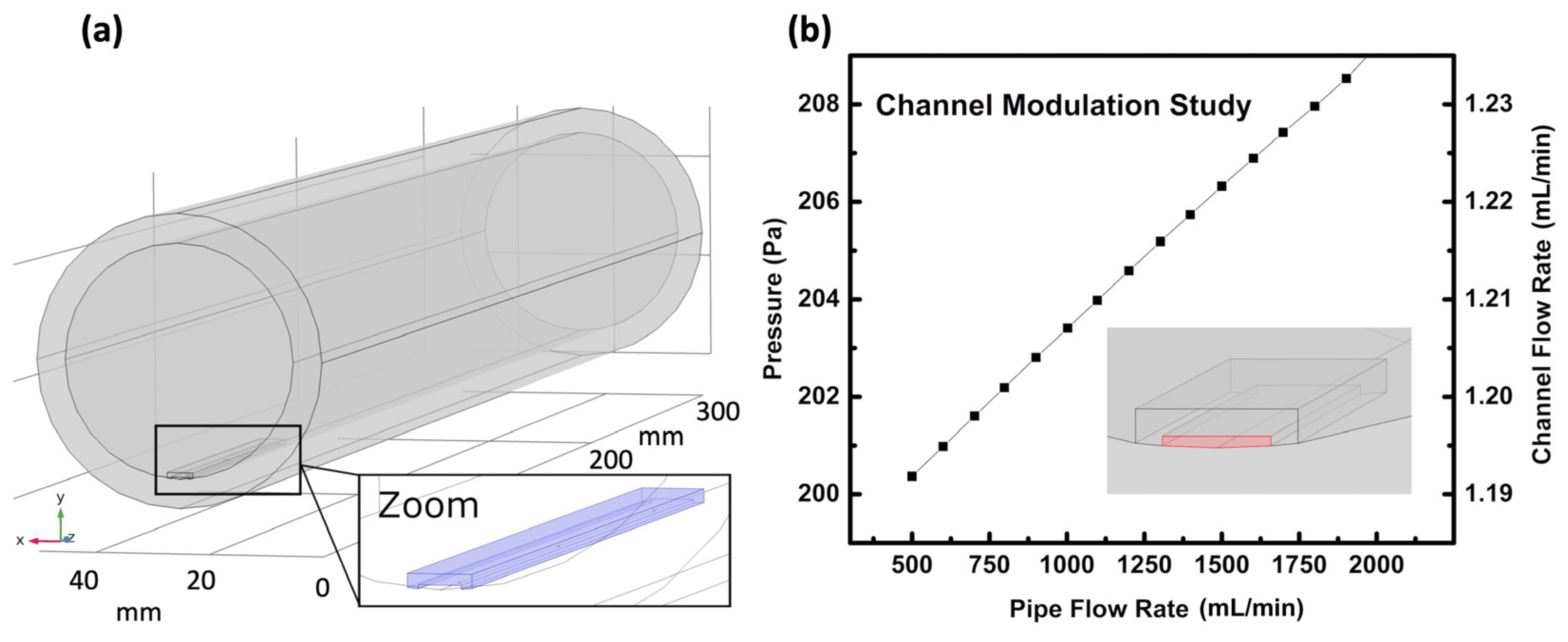
3. Simulation and Modulation
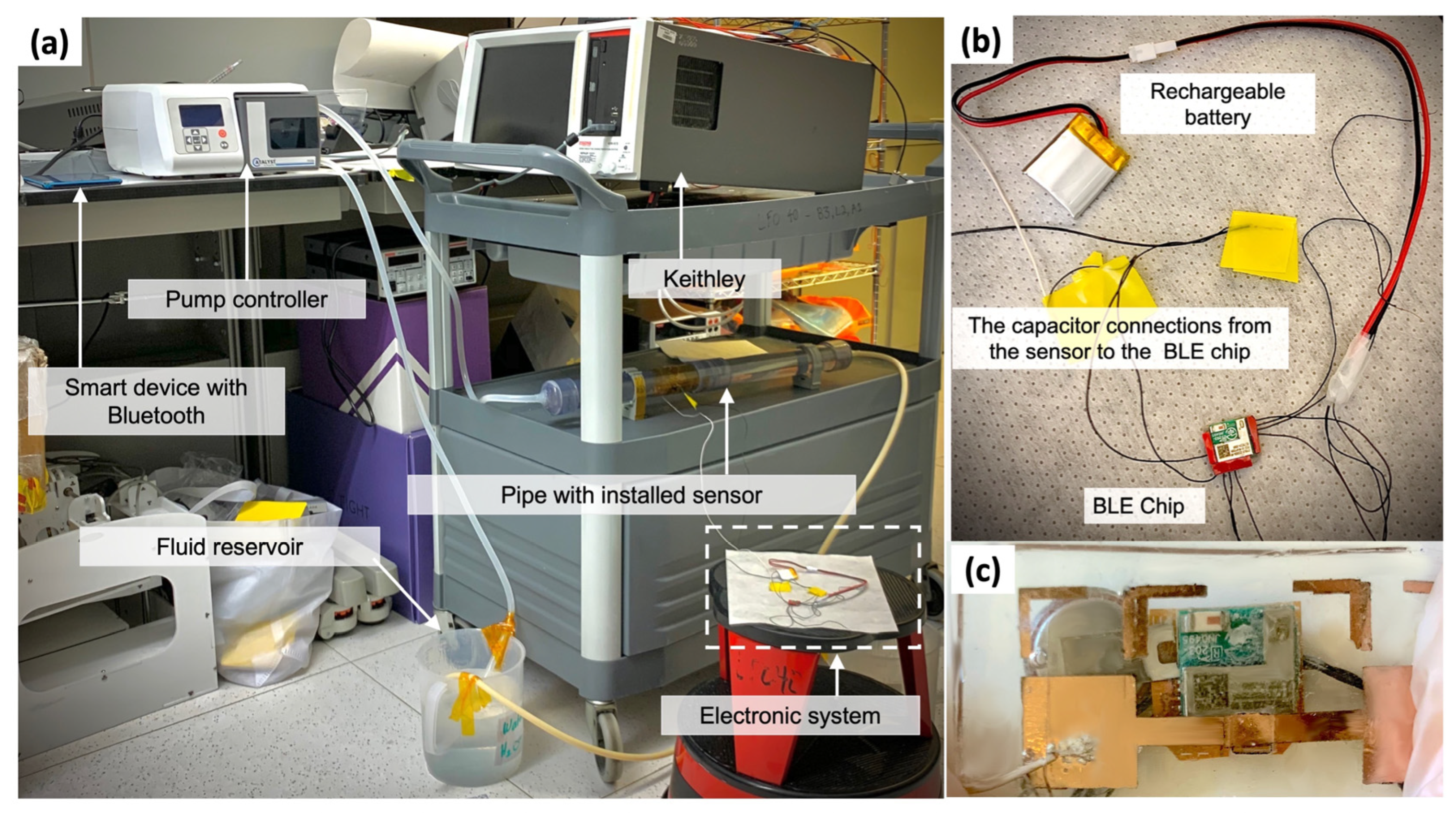
4. Fabrication and Characterization
5. Results and Discussion
6. Conclusions
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, G.B.; Jin, N.D.; Jia, X.H.; Lv, P.J.; Liu, X. Bin Gas-liquid two phase flow measurement method based on combination instrument of turbine flowmeter and conductance sensor. Int. J. Multiph. Flow 2008, 34, 1031–1047. [Google Scholar] [CrossRef]
- Rajita, G.; Mandal, N. Review on transit time ultrasonic flowmeter. In Proceedings of the 2016 2nd International Conference on Control, Instrumentation, Energy and Communication, Kolkata, India, 28–30 January 2016; pp. 88–92. [Google Scholar]
- Abdul Wahab, Y.; Abdul Rahim, R.; Fazalul Rahiman, M.H.; Ridzuan Aw, S.; Mohd Yunus, F.R.; Goh, C.L.; Abdul Rahim, H.; Ling, L.P. Non-invasive process tomography in chemical mixtures—A review. Sensors Actuators B Chem. 2015, 210, 602–617. [Google Scholar] [CrossRef]
- Takashima, S.; Asanuma, H.; Niitsuma, H. A water flowmeter using dual fiber Bragg grating sensors and cross-correlation technique. Sensors Actuators A Phys. 2004, 116, 66–74. [Google Scholar] [CrossRef]
- Kabeel, A.E.; Hamed, M.H.; Omara, Z.M.; Sharshir, S.W. Water desalination using a humidification-dehumidification technique—A detailed review. Nat. Resour. 2013, 4, 286–305. [Google Scholar] [CrossRef] [Green Version]
- Basu, S.; Debnath, A.K. Power Plant Instrumentation and Control Handbook: A Guide to Thermal Power Plants, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2015; ISBN 9780128009406. [Google Scholar]
- Evans, R.P.; Blotter, J.D.; Stephens, A.G. Flow rate measurements using flow-induced pipe vibration. J. Fluids Eng. 2004, 126, 280–285. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, Q. Review of techniques for the mass flow rate measurement of pneumatically conveyed solids. Measurement 2011, 44, 589–604. [Google Scholar] [CrossRef]
- Liu, Z.; Hong, T.; Zhang, W.; Li, Z.; Chen, H. Novel liquid flow sensor based on differential pressure method. Rev. Sci. Instrum. 2007, 78, 015108. [Google Scholar] [CrossRef]
- Wiklund, J.; Shahram, I.; Stading, M. Methodology for in-line rheology by ultrasound Doppler velocity profiling and pressure difference techniques. Chem. Eng. Sci. 2007, 62, 4277–4293. [Google Scholar] [CrossRef]
- Otakane, K.; Sakai, K.; Seto, M. Development of the thermal flow meter. In Proceedings of the SICE 2003 Annual Conference, Fukui, Japan, 6–8 August 2003; pp. 3080–3083. [Google Scholar]
- Huijsing, J.H.; Van Dorp, A.L.C.; Loos, P.J.G. Thermal mass-flow meter. J. Phys. E. 1988, 21, 994. [Google Scholar] [CrossRef]
- Edwards, P.K. Turbine Flow Monitoring Device. U.S. Patent 6487919, 3 December 2002. [Google Scholar]
- Abdullahi, S.I.; Malik, N.A.; Habaebi, M.H.; Salami, A.B. Miniaturized turbine flow sensor: Design and simulation. In Proceedings of the 2018 7th International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 19–20 September 2018; pp. 38–43. [Google Scholar]
- Gianchandani, Y.B.; Takahata, K. Electromagnetic Flow Sensor Device. U.S. Patent 7922667, 12 April 2011. [Google Scholar]
- Spong, E.; Reizes, J. Efficiency improvements of electromagnetic flow control. In Proceedings of the CHT-04—Advances in Computational Heat Transfer III. Proceedings of the Third International Symposium; Begell House, Inc.: Danbury, CT, USA, 2004. [Google Scholar] [CrossRef]
- Cheng, L.K.; Schiferli, W.; Nieuwland, R.A.; Franzen, A.; den Boer, J.J.; Jansen, T.H. Development of a FBG vortex flow sensor for high-temperature applications. In Proceedings of the 21st International Conference on Optical Fiber Sensors, Ottawa, ON, Canada, 15–19 May 2011; Volume 7753, p. 77536V. [Google Scholar]
- Pankanin, G.L. The vortex flowmeter: Various methods of investigating phenomena. Meas. Sci. Technol. 2005, 16, 1–16. [Google Scholar] [CrossRef]
- Masasi, B.; Frazier, R.S.; Taghvaeian, S. Review and operational guidelines for portable ultrasonic flowmeters. Oklahoma Coop. Ext. 2017, 1535, 1–8. [Google Scholar]
- Li, B.; Lu, J.; Chen, J.; Chen, S. Study on transit-time ultrasonic flow meter with waveform analysis. In Proceedings of the 2nd International Conference on Information System and Data Mining, Lakeland, FL, USA, 9–11 April 2018; pp. 146–150. [Google Scholar]
- Lynnworth, L.C.; Liu, Y. Ultrasonic flowmeters: Half-century progress report, 1955–2005. Ultrasonics 2006, 44, 1371–1378. [Google Scholar] [CrossRef] [PubMed]
- Liptákg, B.G. Mass Flowmeters, Coriolis. In Instrument Engineers’ Handbook—Process Measurement and Analysis; CRC Press: Boca Raton, FL, USA, 2003; ISBN 978-0849310836. [Google Scholar]
- Anklin, M.; Drahm, W.; Rieder, A. Coriolis mass flowmeters: Overview of the current state of the art and latest research. Flow Meas. Instrum. 2006, 17, 317–323. [Google Scholar] [CrossRef]
- Bobovnik, G.; Kutin, J.; Bajsić, I. The effect of flow conditions on the sensitivity of the Coriolis flowmeter. Flow Meas. Instrum. 2004, 15, 69–76. [Google Scholar] [CrossRef]
- Gorak, A.; Schoenmakers, H. Distillation: Equipment and Processes, 1st ed.; Academic Press: Cambridge, MA, USA, 2014; ISBN 9780123868794. [Google Scholar]
- Droogendijk, H.; Groenesteijn, J.; Haneveld, J.; Sanders, R.G.P.; Wiegerink, R.J.; Lammerink, T.S.J.; Lötters, J.C.; Krijnen, G.J.M. Parametric excitation of a micro Coriolis mass flow sensor. Appl. Phys. Lett. 2012, 101, 99–102. [Google Scholar] [CrossRef]
- Yao, J.; Takei, M. Application of process tomography to multiphase flow measurement in industrial and biomedical fields: A review. IEEE Sens. J. 2017, 17, 8196–8205. [Google Scholar] [CrossRef]
- Huber, C. MEMS-based Micro-Coriolis Density and Flow Measurement Technology. In Proceedings of the AMA Conferences 2015, Nürnberg, Germany, 19–21 May 2015; Volume 83, pp. 157–162. [Google Scholar]
- Wu, S.; Lin, Q.; Yuen, Y.; Tai, Y.C. MEMS flow sensors for nano-fluidic applications. Sens. Actuators A Phys. 2001, 89, 152–158. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Lee, C.; Chiang, C. A MEMS-based Air Flow Sensor with a Free-standing micro-cantilever Structure. Sensors 2007, 7, 2389–2401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, S.; Liu, Z.; Li, C.; Ge, S.; Xu, F.; Lu, Y. “Hot-wire” microfluidic flowmeter based on a microfiber coupler. Opt. Lett. 2016, 41, 5680. [Google Scholar] [CrossRef]
- Gong, Y.; Qiu, L.; Zhang, C.; Wu, Y.; Rao, Y.J.; Peng, G.D. Dual-mode fiber optofluidic flowmeter with a large dynamic range. J. Light. Technol. 2017, 35, 2156–2160. [Google Scholar] [CrossRef]
- Ramírez-Miquet, E.E.; Perchoux, J.; Loubière, K.; Tronche, C.; Prat, L.; Sotolongo-Costa, O. Optical feedback interferometry for velocity measurement of parallel liquid-liquid flows in a microchannel. Sensors 2016, 16, 1233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tanaka, H.; Terao, M.; Tanaka, Y. Non-wetted thermal micro flow sensor. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 2084–2088. [Google Scholar]
- Arevalo, A.; Byas, E.; Foulds, I.G. Simulation of thermal transport based flow meter for microfluidics applications. In Proceedings of the Comsol Conference, Rotterdam, The Netherlands, 9–11 October 2013; Volume 2, pp. 1–5. [Google Scholar]
- Ashauer, M.; Scholz, H.; Briegel, R.; Sandmaier, H.; Lang, W. Thermal flow sensors for very small flow rate. In Proceedings of the Transducers ’01 Eurosensors XV, Munich, Germany, 10–14 June 2001; pp. 1436–1439. [Google Scholar]
- Kuo, J.T.W.; Yu, L.; Meng, E. Micromachined thermal flow sensors-a review. Micromachines 2012, 3, 550–573. [Google Scholar] [CrossRef] [Green Version]
- Oosterbroek, R.; Lammerink, T.; Berenschot, J.; Krijnen, G.; Elwenspoek, M.; Berg, A. A micromachined pressure/flow-sensor. Sensors Actuators A Phys. 1999, 77, 167–177. [Google Scholar] [CrossRef]
- Liu, J.; Tai, Y.C.; Ho, C.M. MEMS for pressure distribution studies of gaseous flows in microchannels. In Proceedings of the IEEE Micro Electro Mechanical Systems, Amsterdam, The Netherlands, 29 January–2 February 1995; pp. 209–215. [Google Scholar]
- Song, W.; Psaltis, D. Optofluidic membrane interferometer: An imaging method for measuring microfluidic pressure and flow rate simultaneously on a chip. Biomicrofluidics 2011, 5, 44110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roh, C.; Lee, J.; Kang, C.K. Physical properties of PDMS (polydimethylsiloxane) microfluidic devices on fluid behaviors: Various diameters and shapes of periodically-embedded microstructures. Materials 2016, 9, 836. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, P.; Zhu, R.; Que, R. A flexible flow sensor system and its characteristics for fluid mechanics measurements. Sensors 2009, 9, 9533–9543. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Munson, B.R.; Okiishi, T.H.; Huebsch, W.W.; Rothmayer, A.P. Fundamentals of Fluid Mechanics, 7th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 9781118116135. [Google Scholar]
- Georgantopoulou, C.G.; Georgantopoulos, G.A. Fluid Mechanics in Channel, Pipe and Aerodynamic Design Geometries; John Wiley & Sons: Hoboken, NJ, USA, 2018; ISBN 9781119522379. [Google Scholar]
- Nour, M.A.; Khan, S.M.; Qaiser, N.; Bunaiyan, S.A.; Hussain, M.M. Mechanically flexible viscosity sensor for real-time monitoring of tubular architectures for industrial applications. Eng. Rep. 2020, 3, 12315. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nour, M.; Qaiser, N.; Khan, S.; Bunaiyan, S.; Hussain, M.M. Mechanically Flexible Fluid Flow Sensor for Macro-Tubular Architectures. Eng. Proc. 2021, 10, 76. https://doi.org/10.3390/ecsa-8-11330
Nour M, Qaiser N, Khan S, Bunaiyan S, Hussain MM. Mechanically Flexible Fluid Flow Sensor for Macro-Tubular Architectures. Engineering Proceedings. 2021; 10(1):76. https://doi.org/10.3390/ecsa-8-11330
Chicago/Turabian StyleNour, Maha, Nadeem Qaiser, Sherjeel Khan, Saleh Bunaiyan, and Muhammad M. Hussain. 2021. "Mechanically Flexible Fluid Flow Sensor for Macro-Tubular Architectures" Engineering Proceedings 10, no. 1: 76. https://doi.org/10.3390/ecsa-8-11330
APA StyleNour, M., Qaiser, N., Khan, S., Bunaiyan, S., & Hussain, M. M. (2021). Mechanically Flexible Fluid Flow Sensor for Macro-Tubular Architectures. Engineering Proceedings, 10(1), 76. https://doi.org/10.3390/ecsa-8-11330