
Acoustic Positioning System for 3D Localization of Sound Sources Based on the Time of Arrival of a Signal for a Low-Cost System †



Abstract
:1. Introduction
2. Methodology
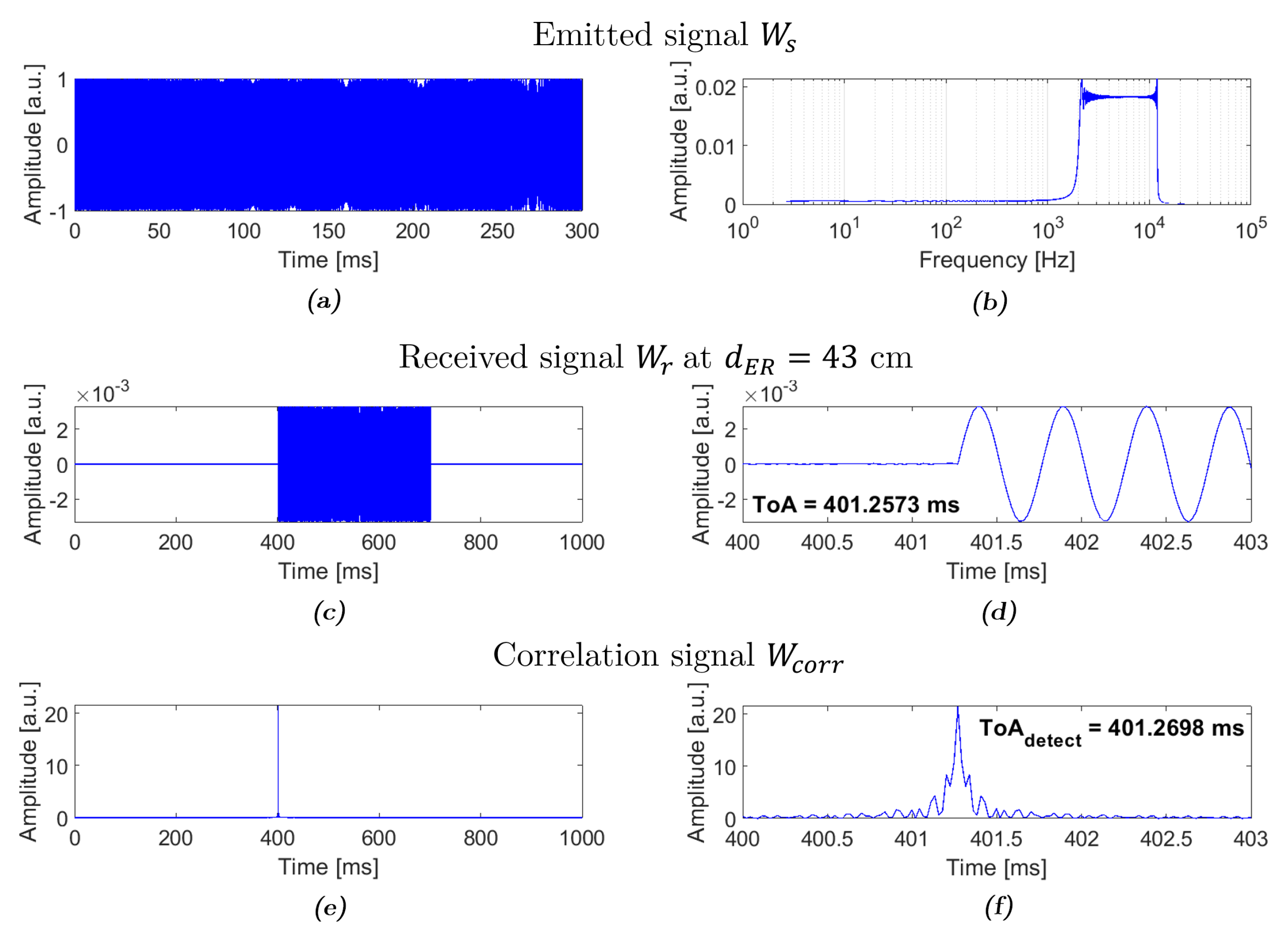
2.1. Detection of the Signal
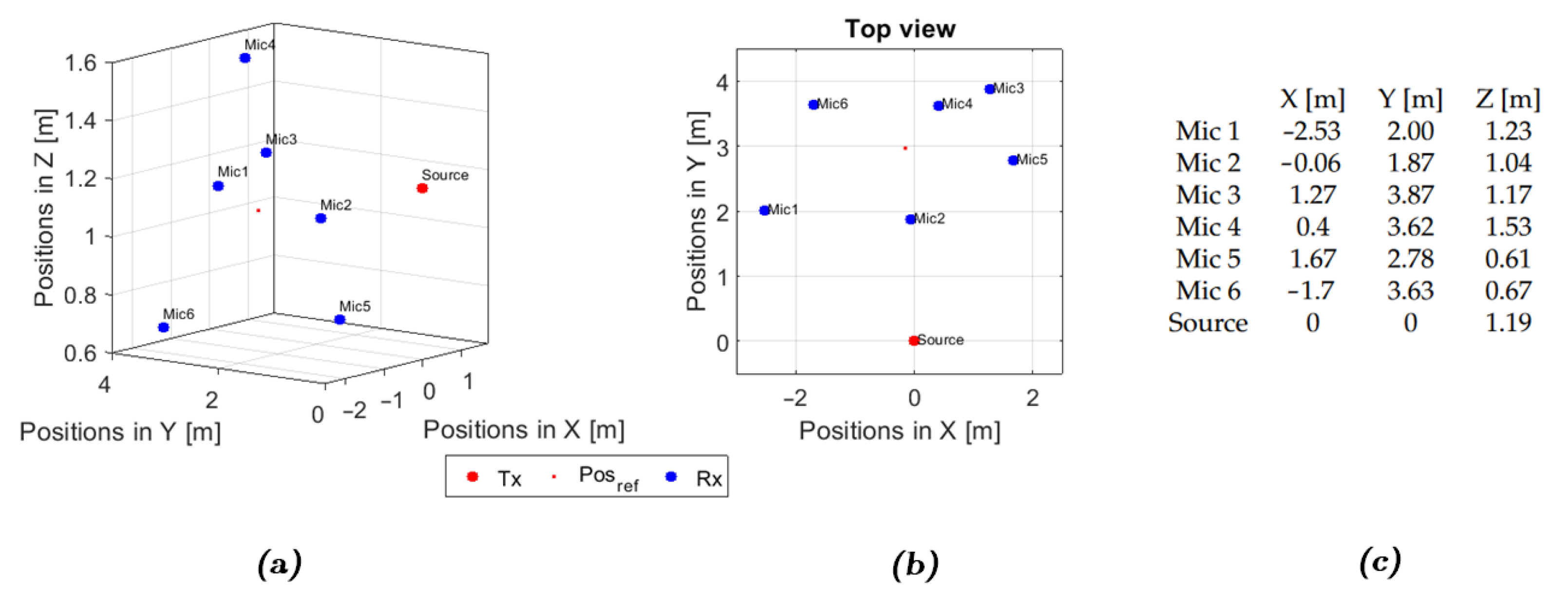
2.2. Localization of the Emitter
3. Experimental Framework and Results
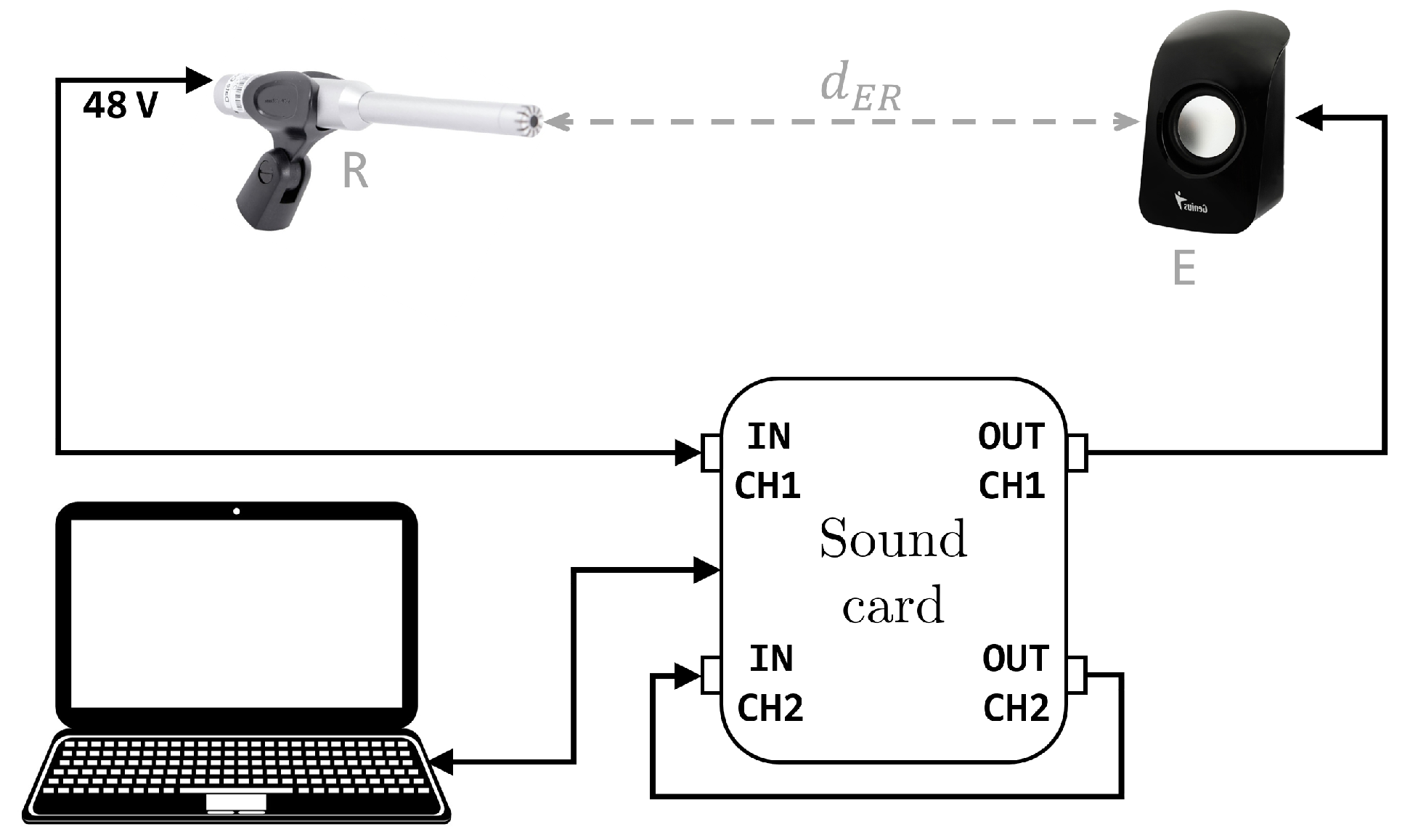
3.1. Experimental Set-Up
- (a)
- Measurements in an anechoic chamber
- (b)
- Measurements in a low-reverberating environment: A low-cost system
3.2. Results
4. Conclusions
- The Newton-Raphson method has been used in this work due to its ease of implementation and its good convergence of the results. This can be justified by the fact that, even though the algorithm is set to perform a maximum of 4000 iterations, acceptable results are obtained after the tenth iteration. This leaves a lot of room for the optimization of the algorithm depending on the application and the wanted precision.
- The localization in space of the sound source in an anechoic chamber is greatly improved when a set of 3 or more microphones is used. Additionally, as it was previously expected, the error of the localization decreases with increasing number of microphones. For a set of 3 microphones, the error is not less than 70 cm, while for the case of a set of 4 microphones the error decreases to values below 1 cm. The reduction in the obtained error by using 5 or 6 microphones is not significant, so the use of additional receivers would not be justified and would simply increase the price of the necessary equipment and the computational cost in the calculations.
- When the study is carried out in a low-reverberating environment, the results are adequate for the case of a set of 4 microphones despite the considerable size of the source with respect to the volume in which the detection is performed and the arrival times of the signal to the receivers. As it has been shown in this work, for any of the x-, y- or z-axis, the difference between the localization of the sound source obtained with the algorithm and the real position of the source is lower than 1 cm when 4 microphones are used, and bigger than 5 cm when a set of 3 microphones is considered.
- Given the low computational cost, the ease of use and the low cost of the system, the system used in this work can be applied to the detection and location of multiple known sources, such as acoustic profiles of submarines, aerial platforms, and in general any boat with a rotor system that has a known acoustic signature [26].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pourmohammad, A.; Ahadi, S.M. N-dimensional N-microphone sound source localization. EURASIP J. Audio Speech Music. Process. 2013, 2013, 27. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.C.; Hudson, R.E.; Yao, K. Maximum-likelihood source localization and unknown sensor location estimation for wideband signals in the near-field. IEEE Trans. Signal Process. 2002, 50, 1843–1854. [Google Scholar] [CrossRef] [Green Version]
- Cueto, J.L.; Petrovici, A.M.; Hernández, R.; Fernández, F. Analysis of the impact of bus signal priority on urban noise. Acta Acust. United Acust. 2017, 103, 561–573. [Google Scholar] [CrossRef]
- Morley, D.W.; De Hoogh, K.; Fecht, D.; Fabbri, F.; Bell, M.; Goodman, P.S.; Elliott, P.; Hodgson, S.; Hansell, A.L.; Gulliver, J. International scale implementation of the CNOSSOS-EU road traffic noise prediction model for epidemiological studies. Environ. Pollut. 2015, 206, 332–341. [Google Scholar] [CrossRef]
- Ruiz-Padillo, A.; Ruiz, D.P.; Torija, A.J.; Ramos-Ridao, Á. Selection of suitable alternatives to reduce the environmental impact of road traffic noise using a fuzzy multi-criteria decision model. Environ. Impact Assess. Rev. 2016, 61, 8–18. [Google Scholar] [CrossRef] [Green Version]
- Licitra, G.; Fredianelli, L.; Petri, D.; Vigotti, M.A. Annoyance evaluation due to overall railway noise and vibration in Pisa urban areas. Sci. Total. Environ. 2016, 568, 1315–1325. [Google Scholar] [CrossRef]
- Bunn, F.; Zannin, P.H. Assessment of railway noise in an urban setting. Appl. Acoust. 2016, 104, 16–23. [Google Scholar] [CrossRef]
- Iglesias-Merchan, C.; Diaz-Balteiro, L.; Soliño, M. Transportation planning and quiet natural areas preservation: Aircraft overflights noise assessment in a National Park. Transp. Res. Part Transp. Environ. 2015, 41, 1–12. [Google Scholar] [CrossRef]
- Gagliardi, P.; Teti, L.; Licitra, G. A statistical evaluation on flight operational characteristics affecting aircraft noise during take-off. Appl. Acoust. 2018, 134, 8–15. [Google Scholar] [CrossRef]
- Nastasi, M.; Fredianelli, L.; Bernardini, M.; Teti, L.; Fidecaro, F.; Licitra, G. Parameters affecting noise emitted by ships moving in port areas. Sustainability 2020, 12, 8742. [Google Scholar] [CrossRef]
- Fredianelli, L.; Nastasi, M.; Bernardini, M.; Fidecaro, F.; Licitra, G. Pass-by characterization of noise emitted by different categories of seagoing ships in ports. Sustainability 2020, 12, 1740. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, D.; McBride, D.; Welch, D.; Dirks, K.N.; Hill, E.M. Evaluating the impact of wind turbine noise on health-related quality of life. Noise Health 2011, 13, 333. [Google Scholar] [CrossRef] [PubMed]
- Fredianelli, L.; Gallo, P.; Licitra, G.; Carpita, S. Analytical assessment of wind turbine noise impact at receiver by means of residual noise determination without the wind farm shutdown. Noise Control. Eng. J. 2017, 65, 417–433. [Google Scholar] [CrossRef]
- Nissenbaum, M.A.; Aramini, J.J.; Hanning, C.D. Effects of industrial wind turbine noise on sleep and health. Noise Health 2012, 14, 237. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Chong, J.W. An efficient TDOA-based localization algorithm without synchronization between base stations. Int. J. Distrib. Sens. Netw. 2015, 11, 832351. [Google Scholar] [CrossRef] [Green Version]
- Adrián-Martínez, S.; Bou-Cabo, M.; Felis, I.; Llorens, C.D.; Martínez-Mora, J.A.; Saldaña, M.; Ardid, M. Acoustic signal detection through the cross-correlation method in experiments with different signal to noise ratio and reverberation conditions. In International Conference on Ad-Hoc Networks and Wireless; Springer: Berlin/Heidelberg, Germany, 2014; pp. 66–79. [Google Scholar]
- Mason, S.F.; Berger, C.R.; Zhou, S.; Willett, P. Detection, Synchronization, and Doppler Scale Estimation with Multicarrier Waveforms in Underwater Acoustic Communication. IEEE J. Sel. Areas Commun. 2008, 26, 1638–1649. [Google Scholar] [CrossRef]
- Nosal, E. Flood-fill algorithms used for passive acoustic detection and tracking. In Proceedings of the New Trends for Environmental Monitoring Using Passive Systems, Hyeres, France, 14–17 October 2008; pp. 1–5. [Google Scholar]
- Dixon, N.; Hill, R.; Kavanagh, J. Acoustic emission monitoring of slope instability: Development of an active waveguide system. Proc. Inst. Civ.-Eng.-Geotech. Eng. 2003, 156, 83–95. [Google Scholar] [CrossRef]
- Qu, X.; Xie, L.; Tan, W. Iterative source localization based on TDOA and FDOA measurements. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 436–440. [Google Scholar]
- Belloch, J.A.; Cobos, M.; Gonzalez, A.; Quintana-Ortí, E.S. Real-time sound source localization on an embedded GPU using a spherical microphone array. Procedia Comput. Sci. 2015, 51, 201–210. [Google Scholar] [CrossRef] [Green Version]
- Viola, S. KM3NeT acoustic positioning and detection system. In Proceedings of the 8th International Conference on Acoustic and Radio EeV Neutrino Detection Activities (ARENA 2018), Catania, Italy, 12–15 June 2018; p. 02006. [Google Scholar]
- Rossing, T.D.; Rossing, T.D. (Eds.) Springer Handbook of Acoustics; Springer: New York, NY, USA, 2007. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing; MPC: New York, NY, USA, 1992. [Google Scholar]
- Otero, J.; Ardid, M.; Felis, I.; Herrero, A. Acoustic location of Bragg peak for Hadrontherapy Monitoring. Proceedings 2018, 4, 6. [Google Scholar] [CrossRef] [Green Version]
- Fillinger, L.; Sutin, A.; Sedunov, A. Acoustic ship signature measurements by cross-correlation method. J. Acoust. Soc. Am. 2011, 129, 774. [Google Scholar] [CrossRef]
- Rhinehart, T.A.; Chronister, L.M.; Devlin, T.; Kitzes, J. Acoustic localization of terrestrial wildlife: Current practices and future opportunities. Ecol. Evol. 2020, 10, 6794–6818. [Google Scholar] [CrossRef] [PubMed]
- Stafford, K.M.; Fox, C.G.; Clark, D.S. Long-range acoustic detection and localization of blue whale calls in the northeast Pacific Ocean. J. Acoust. Soc. Am. 1998, 104, 3616. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinates | [cm] | [cm] | [cm] | d [cm] |
|---|---|---|---|---|
| Real position | - | - | - | |
| Localized position (3 mics) | 2.0 | 4.8 | 1.8 | 5.5 |
| Localized position (4 mics) | 0.4 | 0.7 | 0.3 | 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D.Tortosa, D.; Herrero-Durá, I.; Otero, J.E. Acoustic Positioning System for 3D Localization of Sound Sources Based on the Time of Arrival of a Signal for a Low-Cost System. Eng. Proc. 2021, 10, 15. https://doi.org/10.3390/ecsa-8-11307
D.Tortosa D, Herrero-Durá I, Otero JE. Acoustic Positioning System for 3D Localization of Sound Sources Based on the Time of Arrival of a Signal for a Low-Cost System. Engineering Proceedings. 2021; 10(1):15. https://doi.org/10.3390/ecsa-8-11307
Chicago/Turabian StyleD.Tortosa, Dídac, Iván Herrero-Durá, and Jorge E. Otero. 2021. "Acoustic Positioning System for 3D Localization of Sound Sources Based on the Time of Arrival of a Signal for a Low-Cost System" Engineering Proceedings 10, no. 1: 15. https://doi.org/10.3390/ecsa-8-11307
APA StyleD.Tortosa, D., Herrero-Durá, I., & Otero, J. E. (2021). Acoustic Positioning System for 3D Localization of Sound Sources Based on the Time of Arrival of a Signal for a Low-Cost System. Engineering Proceedings, 10(1), 15. https://doi.org/10.3390/ecsa-8-11307