

Analysis of Ultrasonic Wave Dispersion in Presence of Attenuation and Second-Gradient Contributions



Abstract
1. Introduction
- Section 2 outlines the construction of the governing equations based on the Hamilton–Rayleigh principle, considering both internal viscosity and second-gradient parameters of the material. Starting from the dispersion equation and using the wave-form solution, we derive the wave number and then the phase velocity and the quality factor for the evaluation of attenuation phenomena. Once the methodology and model have been finalized, we search for materials and experimental data from the literature to validate the model.
- Section 3 focuses on the validation of the above model. Three case studies from the literature (one involving natural materials and two involving artificial materials) are examined. The purpose is to compare experimental data with the numerical simulation results derived from the model. Results and comments on the above-mentioned comparison are also discussed in this section. Moreover, we have introduced a numerical simulation to evaluate general aspects of the wave’s behavior, from the perspectives of both dispersion and attenuation.
- Finally, Section 4 offers our conclusions and reflections on future developments, and it reports all the contributions.
2. Modeling and Methods
2.1. Scope and Strategy
2.2. Variational Derivation of Governing Equations (PDE and BCs)
2.3. Wave-Form Solution
3. Validation: Results and Discussion
3.1. Introduction
3.2. Numerical Simulation Toward the Benchmark
3.3. Validation with Data from Literature
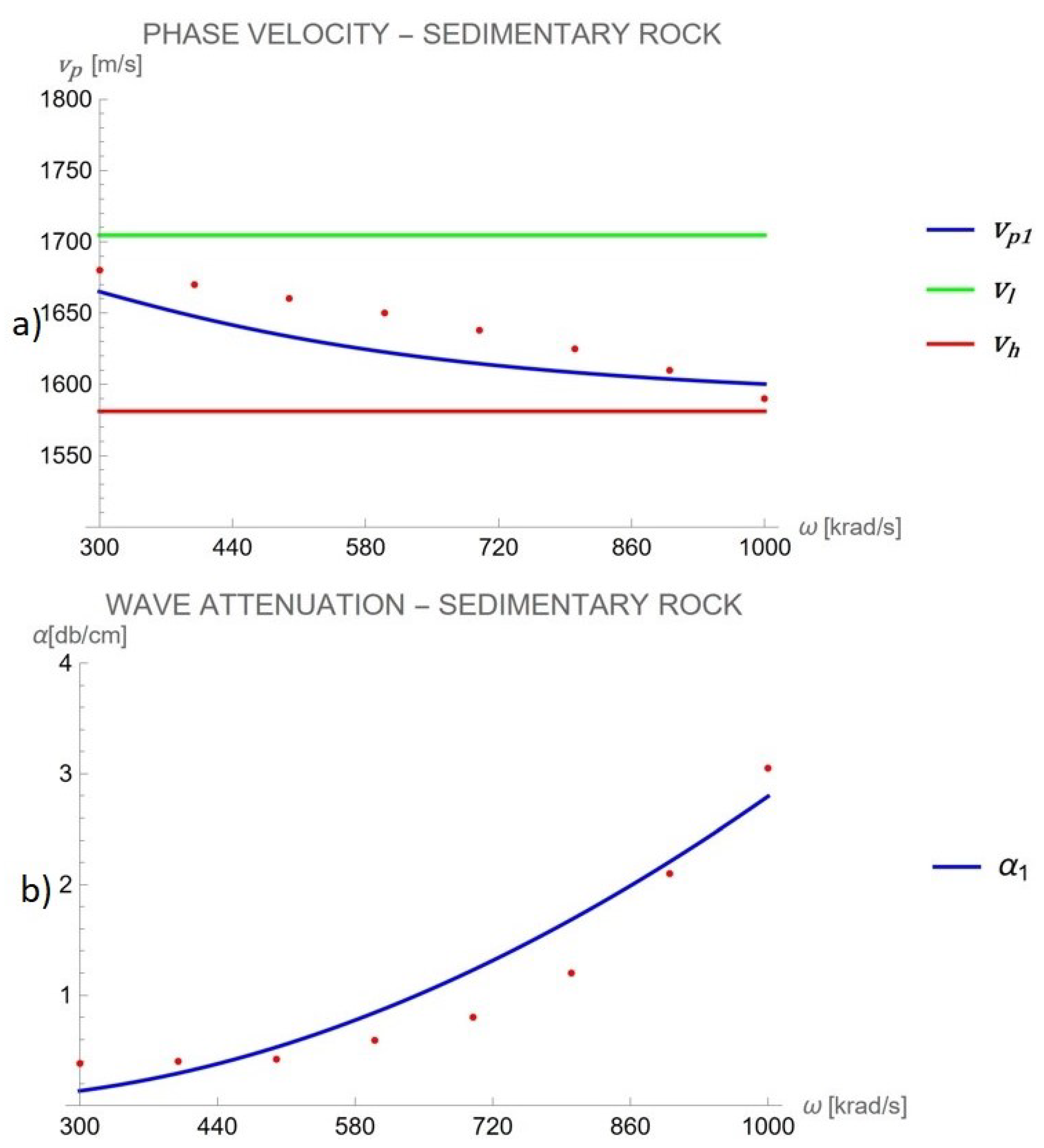
3.3.1. First Case of Study: Sandstone
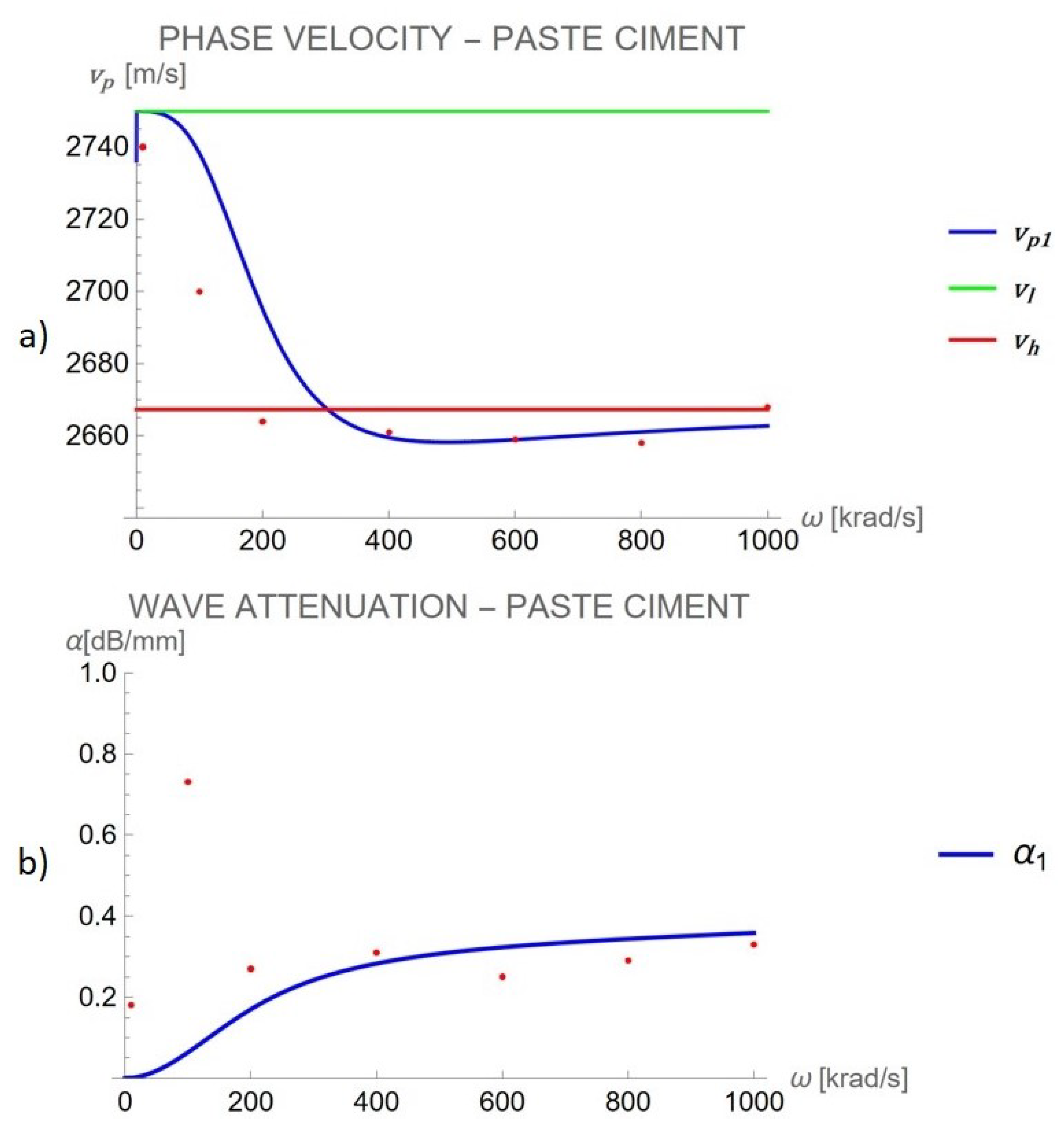
3.3.2. Second Case of Study: Cement Paste
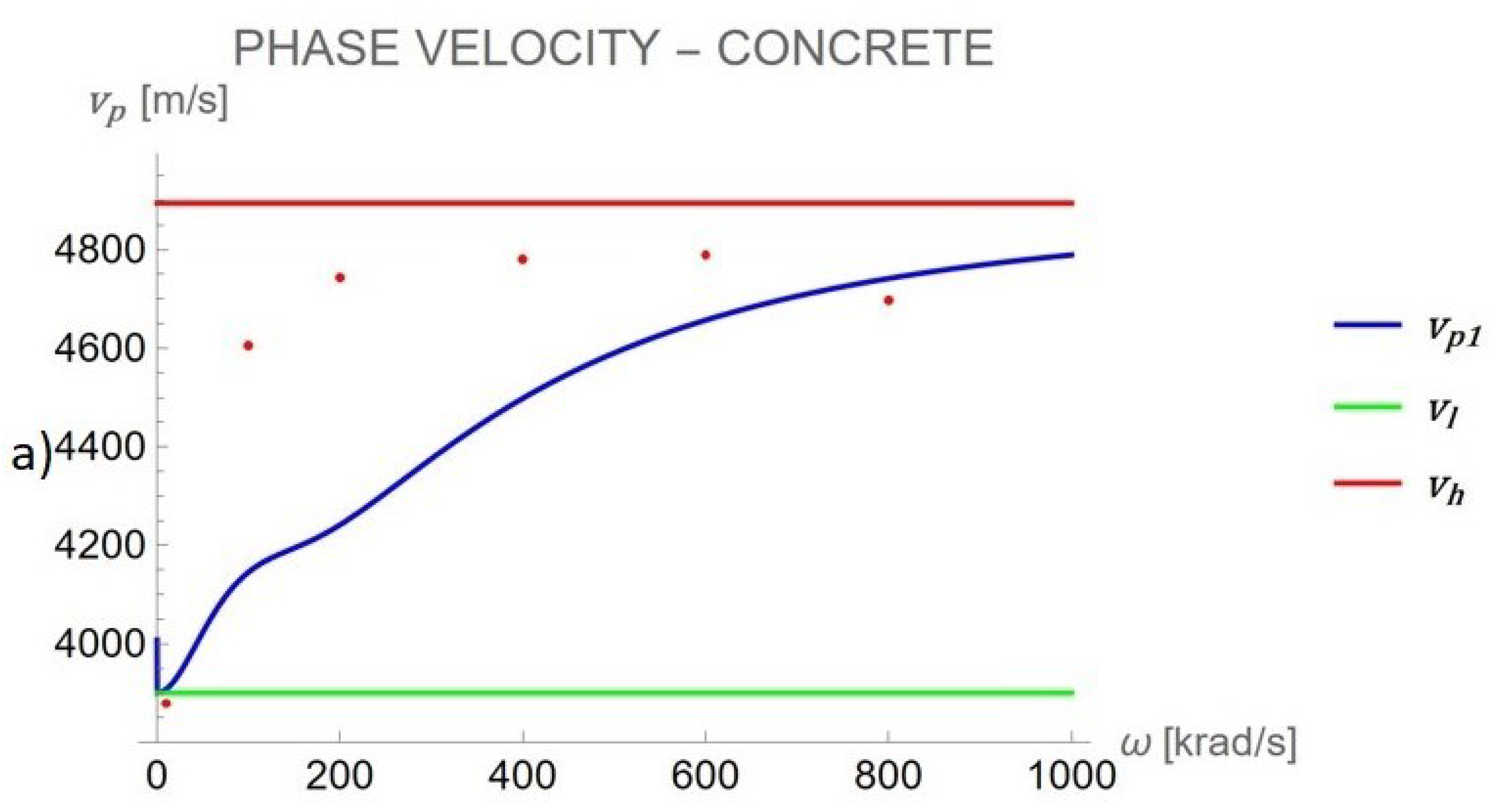
3.3.3. Third Case of Study: Concrete
4. Conclusions
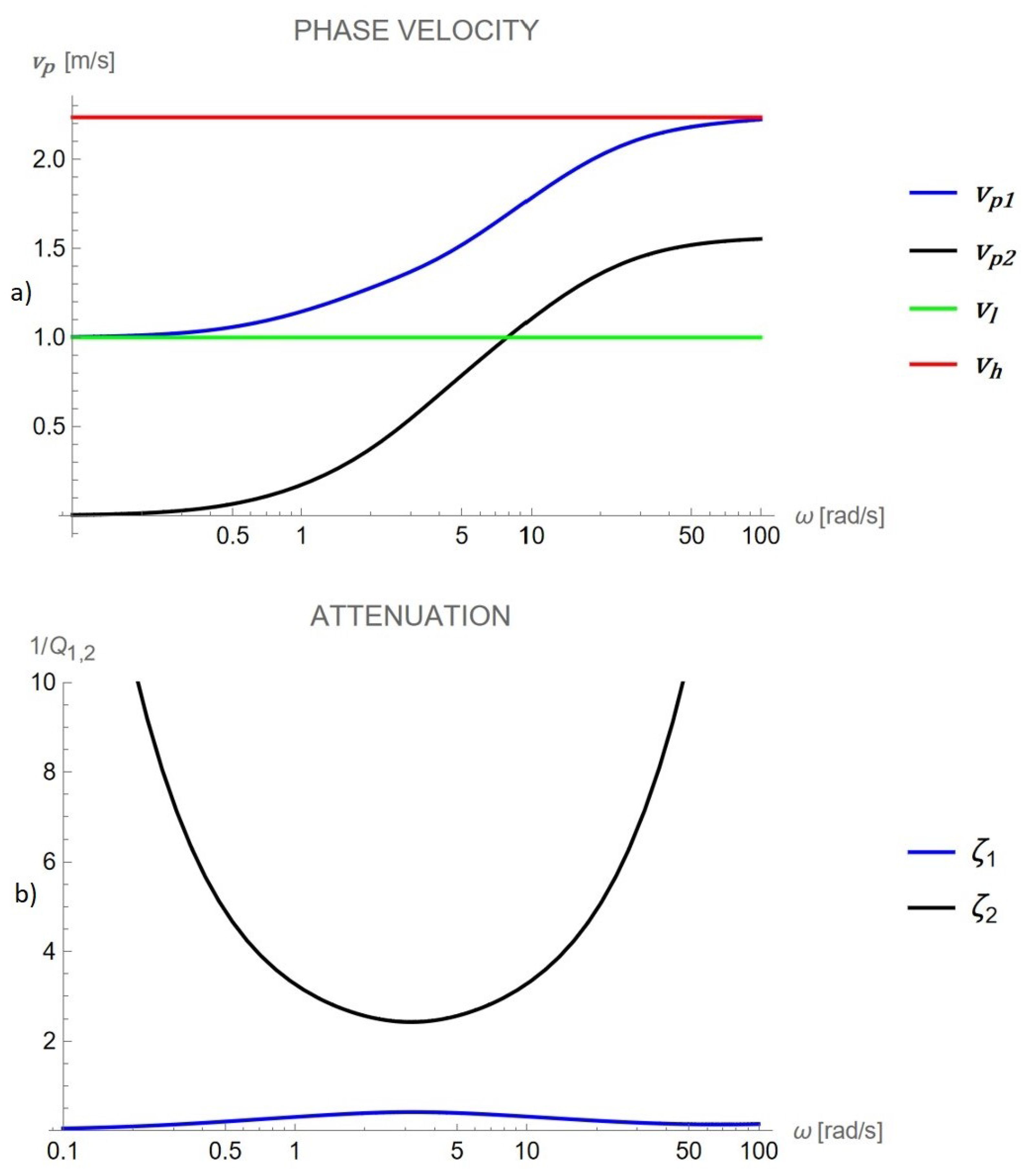
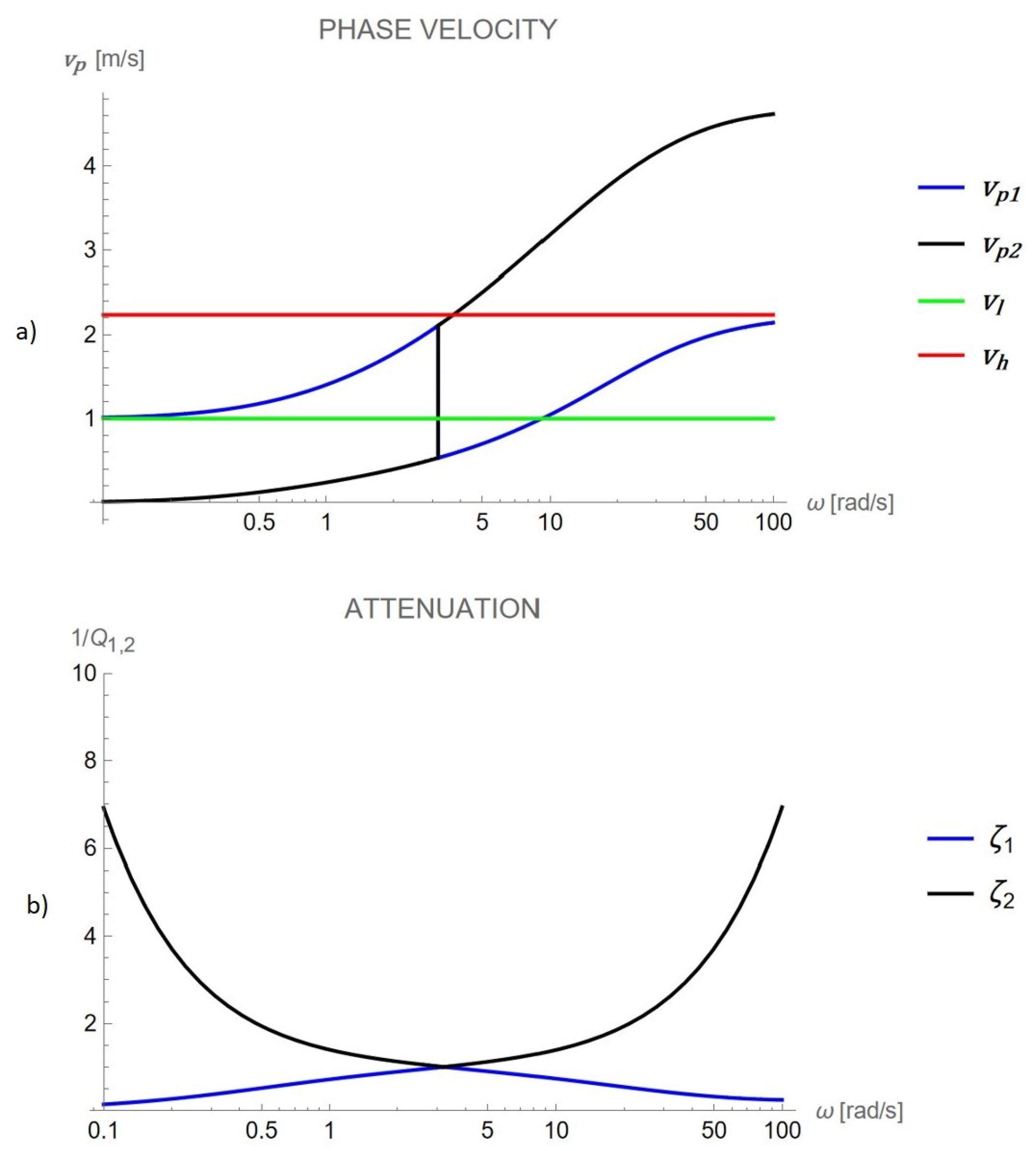
- Wave Dispersion: The analytical expression for the phase velocity (Equation (18)) reveals a frequency-dependent behavior with two distinct propagating modes. As frequency increases, the phase velocity transitions between two asymptotic regimes, consistent with experimental observations in complex structured materials.
- Wave Attenuation: Attenuation is described through the damping ratio (Equation (19)), derived from the real and imaginary parts of the complex wave number. This parameter quantifies energy dissipation and reflects the influence of both first- and second-gradient viscosity.
- Characteristic Frequency: The model predicts a characteristic frequency at which attenuation peaks. This defines a transition zone between low-frequency (non-dispersive) and high-frequency (asymptotic) behavior.
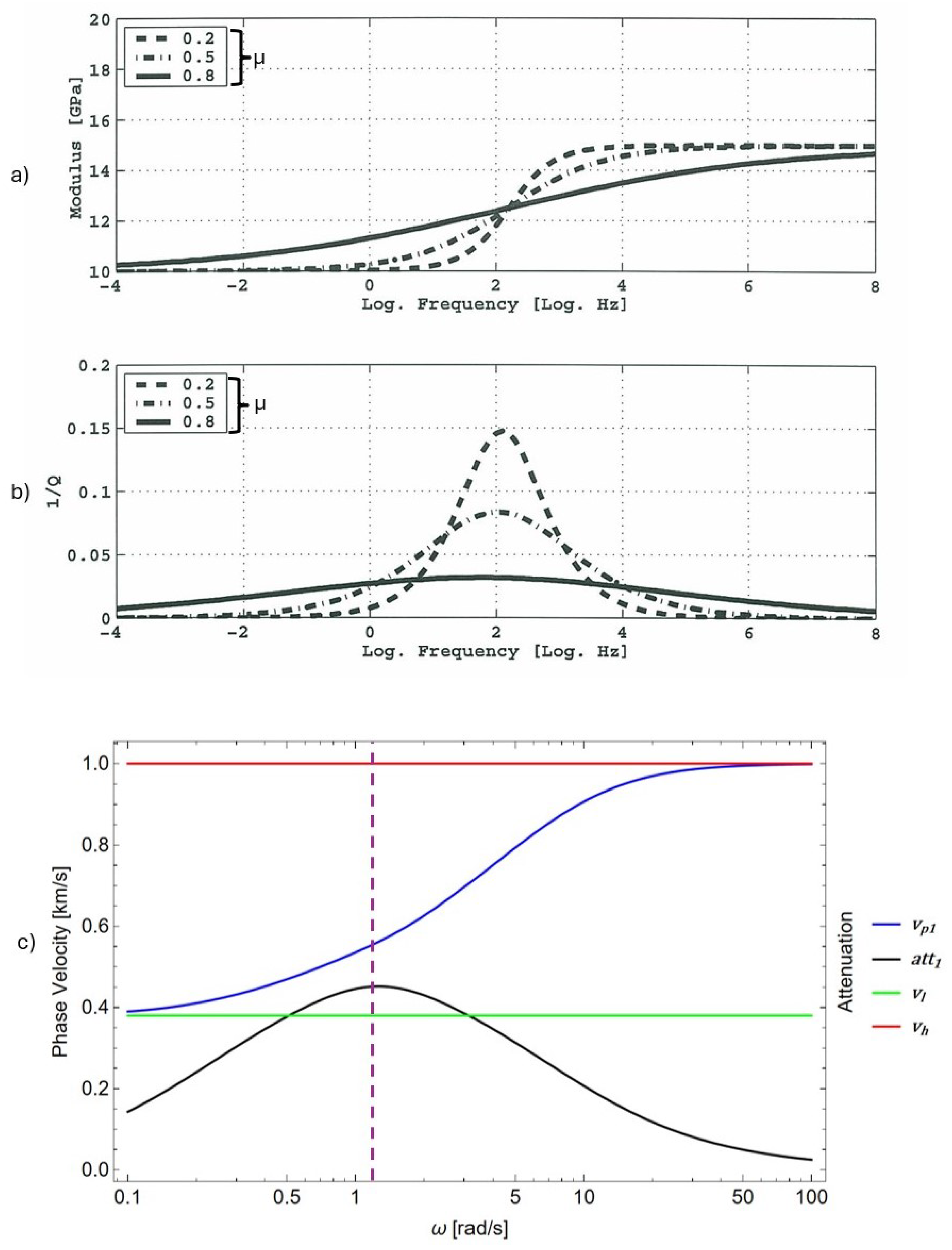
- Agreement with Literature: The model qualitatively reproduces trends in phase velocity and attenuation observed experimentally, notably those reported in Hofmann’s work (Figure 1), supporting the validity of the constitutive assumptions.
- Role of Higher-Order Effects: The inclusion of higher-order elastic () and viscous () terms introduces additional length and time scales, enhancing the model’s ability to capture the mechanical response of architectured or microstructured materials.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol | Mean |
| Action functional | |
| K | Kinetic energy density |
| Potential energy density | |
| External energy | |
| x | Position in the reference configuration |
| t | Time |
| Two instants of time | |
| L | Length of the 1D model in the reference configuration |
| Displacement field | |
| Standard material elastic modulus | |
| Non-standard strain gradient material elastic modulus | |
| Mass density | |
| Micro-inertia | |
| Concentrated forces applied at | |
| Concentrated double forces applied at | |
| Variation operator | |
| Distributed forces | |
| Distributed double forces | |
| Complex wave amplitude | |
| Wave number | |
| Wave number for right-hand-direction propagative wave | |
| Wave frequency | |
| i | Imaginary unit |
| Re | Real operator |
| Im | Imaginary operator |
| Plane wave velocity phase | |
| Low-frequency-regime velocity | |
| High-frequency-regime velocity | |
| Internal material viscosity related to first-gradient field | |
| Internal material viscosity related to second-gradient field | |
| R | Rayleigh function |
| Q | Quality factor |
| Damping ratio | |
| Attenuation coefficient | |
| Root Mean Square Error |
Appendix A. Supplementary Information
Appendix A.1. Micro-Inertia
Appendix A.2. Constitutive Moduli k1 and k2
Appendix A.3. Derivation of Governing Equations: From Extended Rayleigh–Hamilton Principle to Weak Form of Extended Hamilton’s Principle
References
- Aifantis, E.C. The Role of Gradient in the Mechanics of Materials. J. Elast. 2003, 72, 177–200. [Google Scholar]
- dell’Isola, F.; Steigmann, D. A Two-Dimensional Gradient-Elasticity Theory for Woven Fabrics. J. Elast. 2015, 118, 113–125. [Google Scholar] [CrossRef]
- Germain, P. The Mechanics of Materials with Second-Order Gradients. J. Mech. Phys. Solids 1973, 21, 489–509. [Google Scholar]
- Eshelby, J.D. Elastic Inclusions and the Theory of Composite Materials. J. Elast. 1980, 10, 319–343. [Google Scholar]
- Pendry, J.B. Metamaterials: The First Hundred Years. Science 2006, 314, 230–231. [Google Scholar]
- Bauchau, P. Ultrasonic Wave Propagation in Biological Tissues. J. Acoust. Soc. Am. 2001, 110, 2417–2424. [Google Scholar]
- Jafferis, J. Non-local Effects and Attenuation in Wave Propagation. J. Appl. Phys. 2015, 89, 283–299. [Google Scholar]
- Lurie, D. Viscoelastic Effects in Second-Gradient Materials: A Theoretical Framework. J. Mech. Phys. Solids 2017, 102, 37–50. [Google Scholar] [CrossRef]
- Bucur, D. Non-Destructive Testing of Materials by Ultrasonic Waves; Springer: Cham, Switzerland, 2010. [Google Scholar]
- Hofmann, R. Frequency Dependent Elastic and Anelastic Properties of Clastic Rocks. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 2006; p. 185. [Google Scholar]
- Lauwerier, H.A.; Koiter, W.T. North-Holland Series on Applied Mathematics and Mechanics. In North-Holland Series in Applied Mathematics and Mechanics; Elsevier: Amsterdam, The Netherlands, 1967; Volume 2. [Google Scholar]
- Carcione, J.M. Wave Fields in Real Media: Wave Propagation in Anisotropic, Anelastic, Porous and Electromagnetic Media, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Lee, K.; Humphrey, V.; Kim, B.N.; Yoon, S. Frequency dependencies of phase velocity and attenuation coefficient in a water-saturated sandy sediment from 0.3 to 1.0 MHz. J. Acoust. Soc. Am. 2007, 121, 2553–2558. [Google Scholar] [CrossRef]
- Philippidis, T.; Aggelis, D. Experimental study of wave dispersion and attenuation in concrete. Ultrasonics 2005, 43, 584–595. [Google Scholar] [CrossRef]
- Mace, B.; Marconi, E. Wave motion and dispersion phenomena: Veering, locking and strong coupling effects. J. Acoust. Soc. Am. 2012, 131, 1015–1028. [Google Scholar] [CrossRef] [PubMed]
- Rosi, G.; Giorgio, I.; Eremeyev, V.A. Propagation of linear compression waves through plane interfacial layers and mass adsorption in second gradient fluids. ZAMM-J. Appl. Math. Mech./Z. Angew. Math. Mech. 2013, 93, 914–927. [Google Scholar] [CrossRef]
- Wolfenden, A. Dynamic Elastic Modulus Measurements in Materials; ASTM International: West Conshohocken, PA, USA, 1990. [Google Scholar]
- Giorgio, I.; Della Corte, A.; Dell’Isola, F. Dynamics of 1D nonlinear pantographic continua. Nonlinear Dyn. 2017, 88, 21–31. [Google Scholar] [CrossRef]
- Yang, B.; Bacciocchi, M.; Fantuzzi, N.; Luciano, R.; Fabbrocino, F. Computational simulation and acoustic analysis of two-dimensional nano-waveguides considering second strain gradient effects. Comput. Struct. 2024, 296, 107299. [Google Scholar] [CrossRef]
- Yang, B.; Fantuzzi, N.; Bacciocchi, M.; Fabbrocino, F.; Mousavi, M. Nonlinear wave propagation in graphene incorporating second strain gradient theory. Thin-Walled Struct. 2024, 198, 111713. [Google Scholar] [CrossRef]
- Laudato, M.; Barchiesi, E. Non-linear dynamics of pantographic fabrics: Modelling and numerical study. In Wave Dynamics, Mechanics and Physics of Microstructured Metamaterials: Theoretical and Experimental Methods; Springer: Cham, Switzerland, 2019; pp. 241–254. [Google Scholar]
- Nejadsadeghi, N.; Misra, A. Role of Higher-order Inertia in Modulating Elastic Wave Dispersion in Materials with Granular Microstructure. Int. J. Mech. Sci. 2020, 185, 105867. [Google Scholar] [CrossRef]
- Dell’Isola, F.; Madeo, A.; Placidi, L. Linear plane wave propagation and normal transmission and reflection at discontinuity surfaces in second gradient 3D continua. ZAMM-J. Appl. Math. Mech./Z. Angew. Math. Mech. 2012, 92, 52–71. [Google Scholar] [CrossRef]
- dell’Isola, F.; Eugster, S.R.; Fedele, R.; Seppecher, P. Second-gradient continua: From Lagrangian to Eulerian and back. Math. Mech. Solids 2022, 27, 2715–2750. [Google Scholar] [CrossRef]
- Shekarchizadeh, N.; Laudato, M.; Manzari, L.; Abali, B.E.; Giorgio, I.; Bersani, A.M. Parameter identification of a second-gradient model for the description of pantographic structures in dynamic regime. Z. Angew. Math. Phys. 2021, 72, 190. [Google Scholar] [CrossRef]
- Giorgio, I.; Andreaus, U.; Dell’Isola, F.; Lekszycki, T. Viscous second gradient porous materials for bones reconstructed with bio-resorbable grafts. Extrem. Mech. Lett. 2017, 13, 141–147. [Google Scholar] [CrossRef]
- Madeo, A.; Dell’Isola, F.; Darve, F. A continuum model for deformable, second gradient porous media partially saturated with compressible fluids. J. Mech. Phys. Solids 2013, 61, 2196–2211. [Google Scholar] [CrossRef]
- Dell’Isola, F.; Hutter, K. Variations of porosity in a sheared pressurized layer of saturated soil induced by vertical drainage of water. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1999, 455, 2841–2860. [Google Scholar] [CrossRef]
- Luciano, R.; Barbero, E. Formulas for the stiffness of composites with periodic microstructure. Int. J. Solids Struct. 1994, 31, 2933–2944. [Google Scholar] [CrossRef]
- Fabbrocino, F.; Amendola, A. Discrete-to-continuum approaches to the mechanics of pentamode bearings. Compos. Struct. 2017, 167, 219–226. [Google Scholar] [CrossRef]
- Abali, B.E.; Müller, W.H.; Dell’Isola, F. Theory and computation of higher gradient elasticity theories based on action principles. Arch. Appl. Mech. 2017, 87, 1495–1510. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M. Genesis and progress of virtual power principle. Acta Mech. 2022, 233, 5431–5445. [Google Scholar] [CrossRef]
- Ciallella, A.; Giorgio, I.; Eugster, S.R.; Rizzi, N.L.; dell’Isola, F. Generalized beam model for the analysis of wave propagation with a symmetric pattern of deformation in planar pantographic sheets. Wave Motion 2022, 113, 102986. [Google Scholar] [CrossRef]
- Barchiesi, E.; Laudato, M.; Di Cosmo, F. Wave dispersion in non-linear pantographic beams. Mech. Res. Commun. 2018, 94, 128–132. [Google Scholar] [CrossRef]
- Abali, B.E.; Vazic, B.; Newell, P. Influence of microstructure on size effect for metamaterials applied in composite structures. Mech. Res. Commun. 2022, 122, 103877. [Google Scholar] [CrossRef]
- Migliaccio, G.; D’Annibale, F. On the role of different nonlinear damping forms in the dynamic behavior of the generalized Beck’s column. Nonlinear Dyn. 2024, 112, 13733–13750. [Google Scholar] [CrossRef]
- Placidi, L.; Di Girolamo, F.; Fedele, R. Variational study of a Maxwell–Rayleigh-type finite length model for the preliminary design of a tensegrity chain with a tunable band gap. Mech. Res. Commun. 2024, 136, 104255. [Google Scholar] [CrossRef]
- Berezovski, A.; Giorgio, I.; Corte, A.D. Interfaces in micromorphic materials: Wave transmission and reflection with numerical simulations. Math. Mech. Solids 2016, 21, 37–51. [Google Scholar] [CrossRef]
- Placidi, L.; Rosi, G.; Giorgio, I.; Madeo, A. Reflection and transmission of plane waves at surfaces carrying material properties and embedded in second-gradient materials. Math. Mech. Solids 2014, 19, 555–578. [Google Scholar] [CrossRef]
- Hima, N.; D’Annibale, F.; Dal Corso, F. Non-smooth dynamics of buckling based metainterfaces: Rocking-like motion and bifurcations. Int. J. Mech. Sci. 2023, 242, 108005. [Google Scholar] [CrossRef]
- Varadan, V.K.; Varadan, V.V.; Ma, Y. Frequency-dependent elastic properties of rubberlike materials with a random distribution of voids. J. Acoust. Soc. Am. 1984, 76, 296–300. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M. Spacetime evolutive equilibrium in Nonlinear Continuum Mechanics. Contin. Mech. Thermodyn. 2023, 35, 1859–1880. [Google Scholar] [CrossRef]
- Greco, F.; Lonetti, P.; Pascuzzo, A.; Sansone, G. An Analysis of the Dynamic Behavior of Damaged Reinforced Concrete Bridges under Moving Vehicle Loads by Using the Moving Mesh Technique. Struct. Durab. Health Monit. 2023, 17, 457–483. [Google Scholar] [CrossRef]
- Abali, B.E. Revealing the physical insight of a length-scale parameter in metamaterials by exploiting the variational formulation. Contin. Mech. Thermodyn. 2019, 31, 885–894. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Figure nr. | Constitutive Parameters | |||||
|---|---|---|---|---|---|---|---|
| benchmark 1 | 2 | 1 | 0.5 | 1 | 0.1 | 1 | 1 × |
| benchmark 2 | 3 | 1 | 0.5 | 1 | 0.1 | 3 | 1 × |
| sandstone | 4 | 7.7 × | 0.1 × | 2650 | 0.04 | 100 | 5 × |
| cement paste | 5 | 11.3 × | 1.8 × | 1500 | 0.253 | 23.8 × | 1 × |
| concrete | 6 | 37.3 × | 33.5 × | 2450 | 1.4 | 300 × | 1 × |
| (kHz) | Theo. (m/s) | Exp. (m/s) | Theo. | Exp. |
|---|---|---|---|---|
| 300 | 1665.03 | 1680 | 0.1338 | 0.38 |
| 400 | 1647.69 | 1670 | 0.2928 | 0.40 |
| 500 | 1633.53 | 1660 | 0.5291 | 0.42 |
| 600 | 1622.66 | 1650 | 0.8417 | 0.59 |
| 700 | 1614.49 | 1638 | 1.2273 | 0.80 |
| 800 | 1608.36 | 1625 | 1.6828 | 1.20 |
| 900 | 1603.73 | 1610 | 2.2061 | 2.10 |
| 1000 | 1600.18 | 1590 | 2.7954 | 3.05 |
| (kHz) | Theo. (m/s) | Exp. (m/s) | Theo. | Exp. |
|---|---|---|---|---|
| 10 | 2749.97 | 2740 | 0.00076 | 0.18 |
| 100 | 2738.17 | 2700 | 0.06341 | 0.73 |
| 200 | 2694.98 | 2664 | 0.17002 | 0.27 |
| 400 | 2659.52 | 2661 | 0.28302 | 0.31 |
| 600 | 2658.95 | 2659 | 0.32307 | 0.25 |
| 800 | 2661.11 | 2658 | 0.34370 | 0.29 |
| 1000 | 2662.75 | 2668 | 0.35856 | 0.33 |
| (kHz) | Theo. (m/s) | Exp. (m/s) | Theo. | Exp. |
|---|---|---|---|---|
| 10 | 3907.19 | 3879 | 0.002038 | 0.03 |
| 100 | 4145.15 | 4605 | 0.114637 | 0.17 |
| 200 | 4240.98 | 4743 | 0.242419 | 0.19 |
| 400 | 4498.14 | 4780 | 0.348456 | 0.33 |
| 600 | 4656.95 | 4789 | 0.387680 | 0.38 |
| 800 | 4741.50 | 4697 | 0.406327 | 0.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Fazio, N.; Placidi, L.; Fabbrocino, F.; Luciano, R. Analysis of Ultrasonic Wave Dispersion in Presence of Attenuation and Second-Gradient Contributions. CivilEng 2025, 6, 37. https://doi.org/10.3390/civileng6030037
De Fazio N, Placidi L, Fabbrocino F, Luciano R. Analysis of Ultrasonic Wave Dispersion in Presence of Attenuation and Second-Gradient Contributions. CivilEng. 2025; 6(3):37. https://doi.org/10.3390/civileng6030037
Chicago/Turabian StyleDe Fazio, Nicola, Luca Placidi, Francesco Fabbrocino, and Raimondo Luciano. 2025. "Analysis of Ultrasonic Wave Dispersion in Presence of Attenuation and Second-Gradient Contributions" CivilEng 6, no. 3: 37. https://doi.org/10.3390/civileng6030037
APA StyleDe Fazio, N., Placidi, L., Fabbrocino, F., & Luciano, R. (2025). Analysis of Ultrasonic Wave Dispersion in Presence of Attenuation and Second-Gradient Contributions. CivilEng, 6(3), 37. https://doi.org/10.3390/civileng6030037