Decoupled Model-Free Adaptive Control with Prediction Features Experimentally Applied to a Three-Tank System Following Time-Varying Trajectories



Abstract
1. Introduction
2. Mathematical Background
2.1. Dynamic Linearization Technique
2.1.1. Compact-Form Dynamic Linearization (CFDL)
2.1.2. Partial-Form Dynamic Linearization (PFDL)
2.2. Model-Free Adaptive Control (MFAC)
2.2.1. MFAC-CFDL
- PPD estimation
- Reset algorithmIf (i) , or (ii) , or (iii) , then .
- Control input
2.2.2. MFAC-PFDL
- PG estimation
- Reset algorithmIf (i) , or (ii) , or (iii) , then
- Control input
2.3. Modified Model-Free Adaptive Control (MMFAC)
2.3.1. MMFAC-CFDL
- PPD estimation
- Reset algorithmIf (i) , or (ii) , or (iii) , then .
- Control input
2.3.2. MMFAC-PFDL
- PPD estimation
- Reset algorithmIf (i) , or (ii) , or (iii) , Then .
- Control input
2.4. Model-Free Adaptive Predictive Control (MFAPC)
- PPD estimation
- Reset algorithm for PPDIf (i) , or (ii) , or (iii) , then .
- Coefficients calculation
- Reset algorithm for the coefficient equationIf , then .
- PPD predictionwith .
- Reset algorithm for PPD predictionIf (i) , or (ii) , then and .
- Control input
3. Experimental Setup
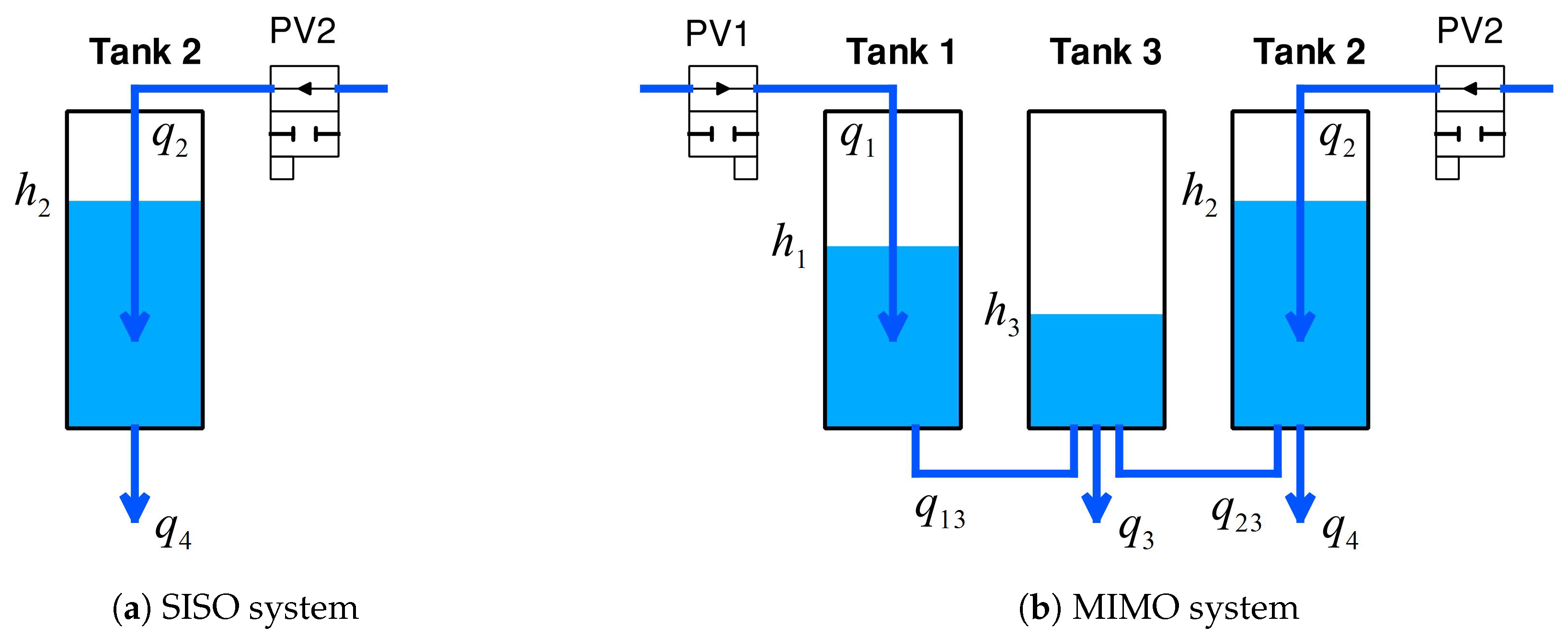
4. Problem Formulation from a Practical Point of View
4.1. Siso System Control
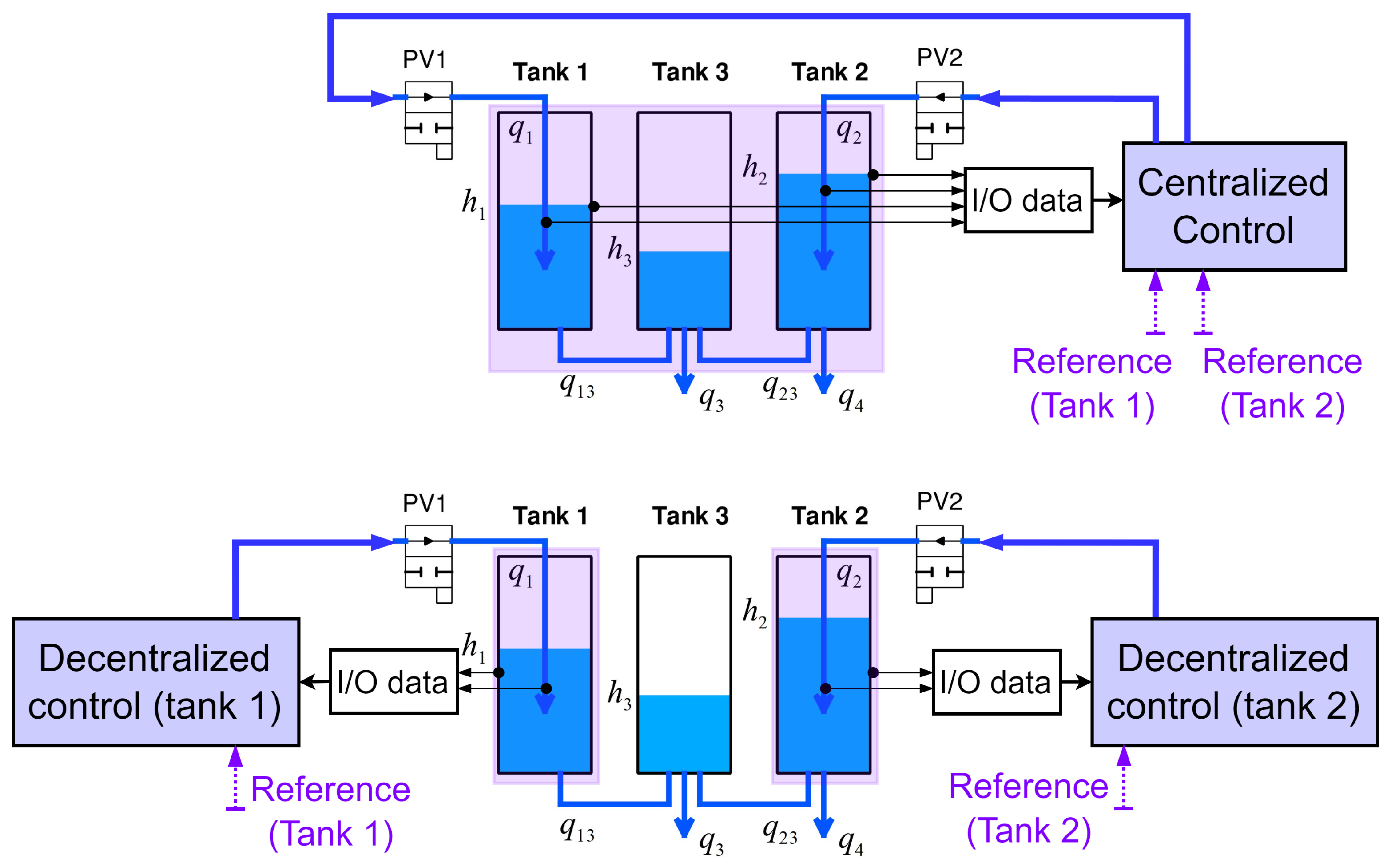
4.2. Multi-SISO System Control
5. Experimental Results
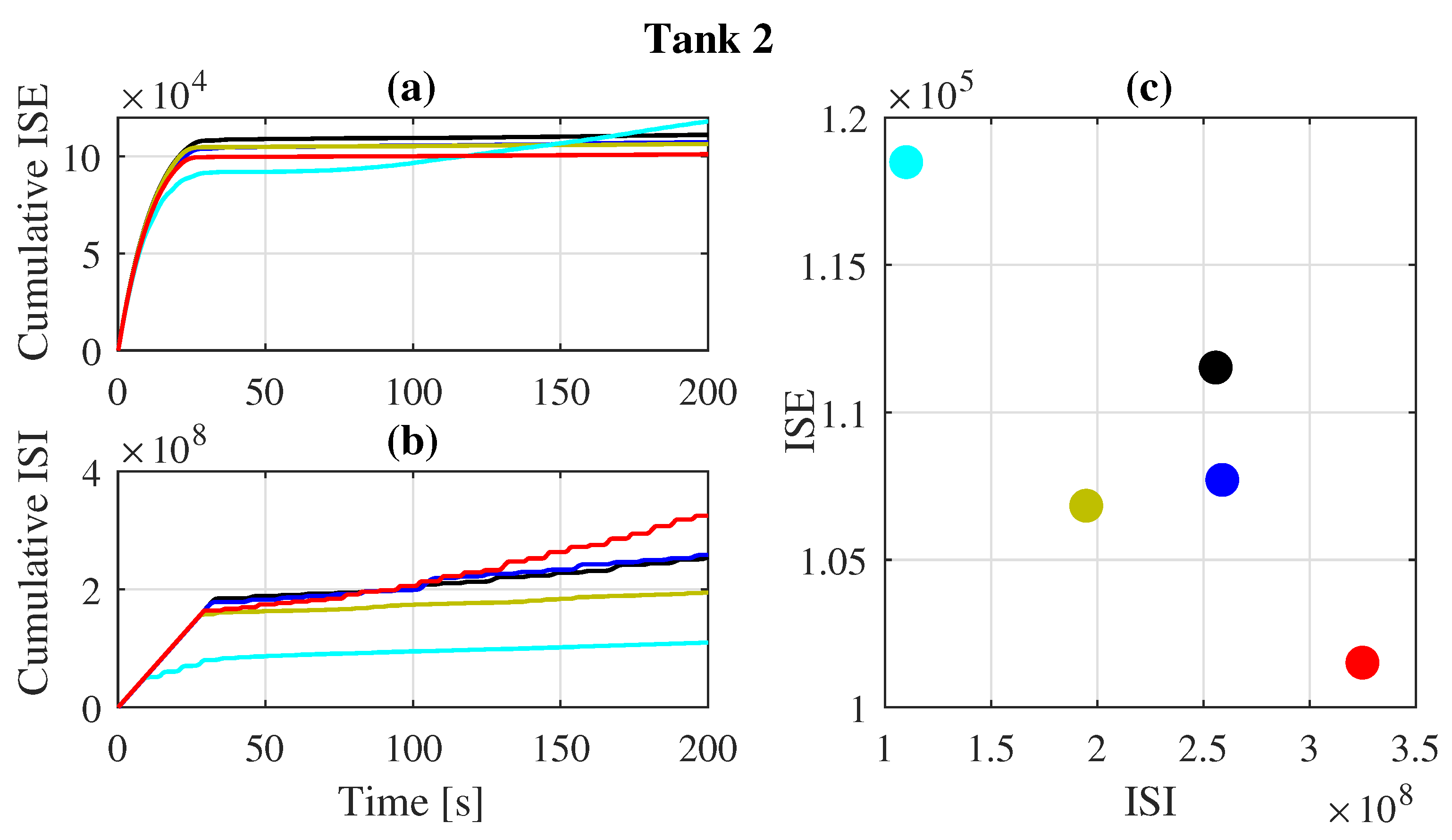
5.1. Metric for Parameter Tuning and Performance Comparison
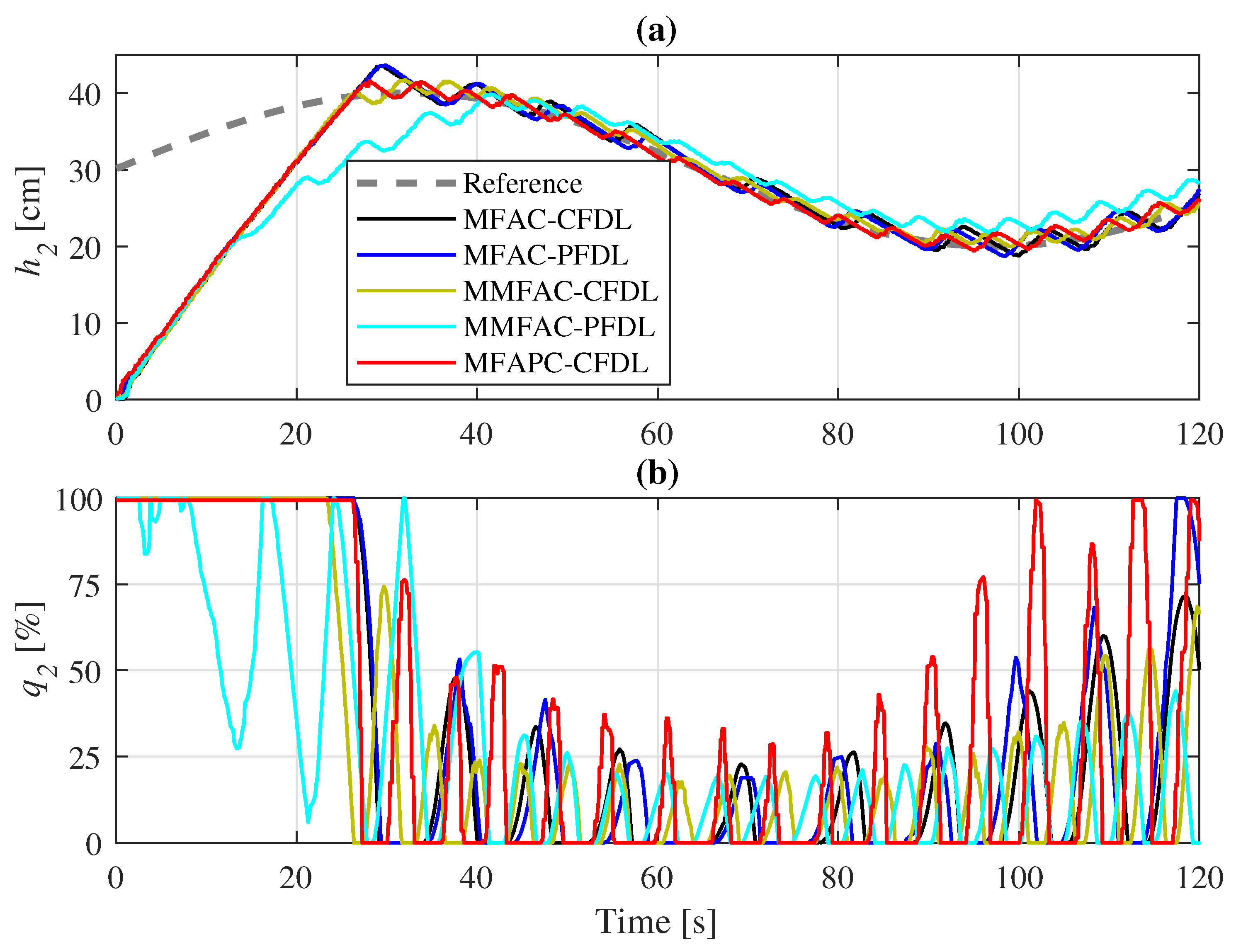
5.2. Comparison of Approaches for the Considered SISO System
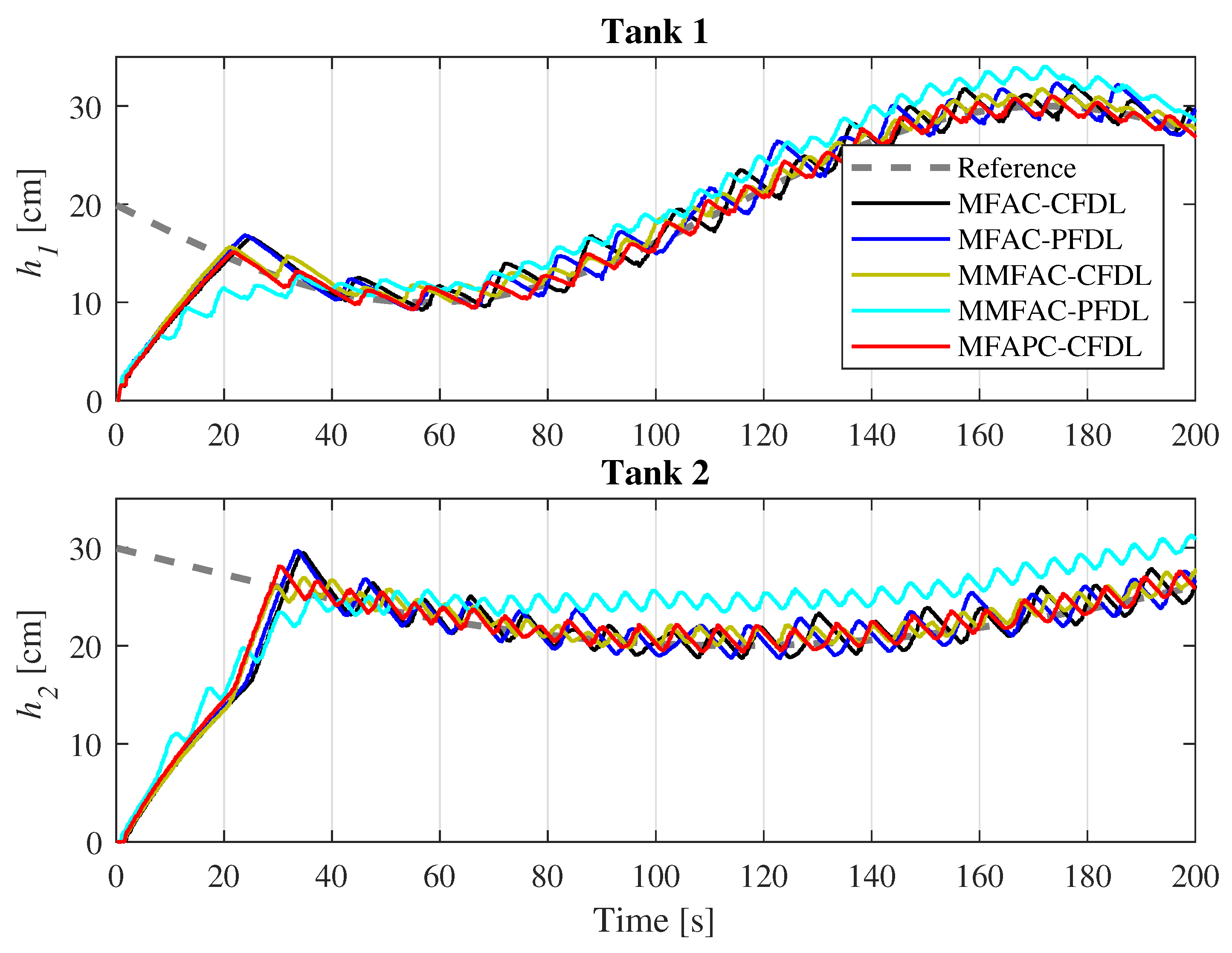
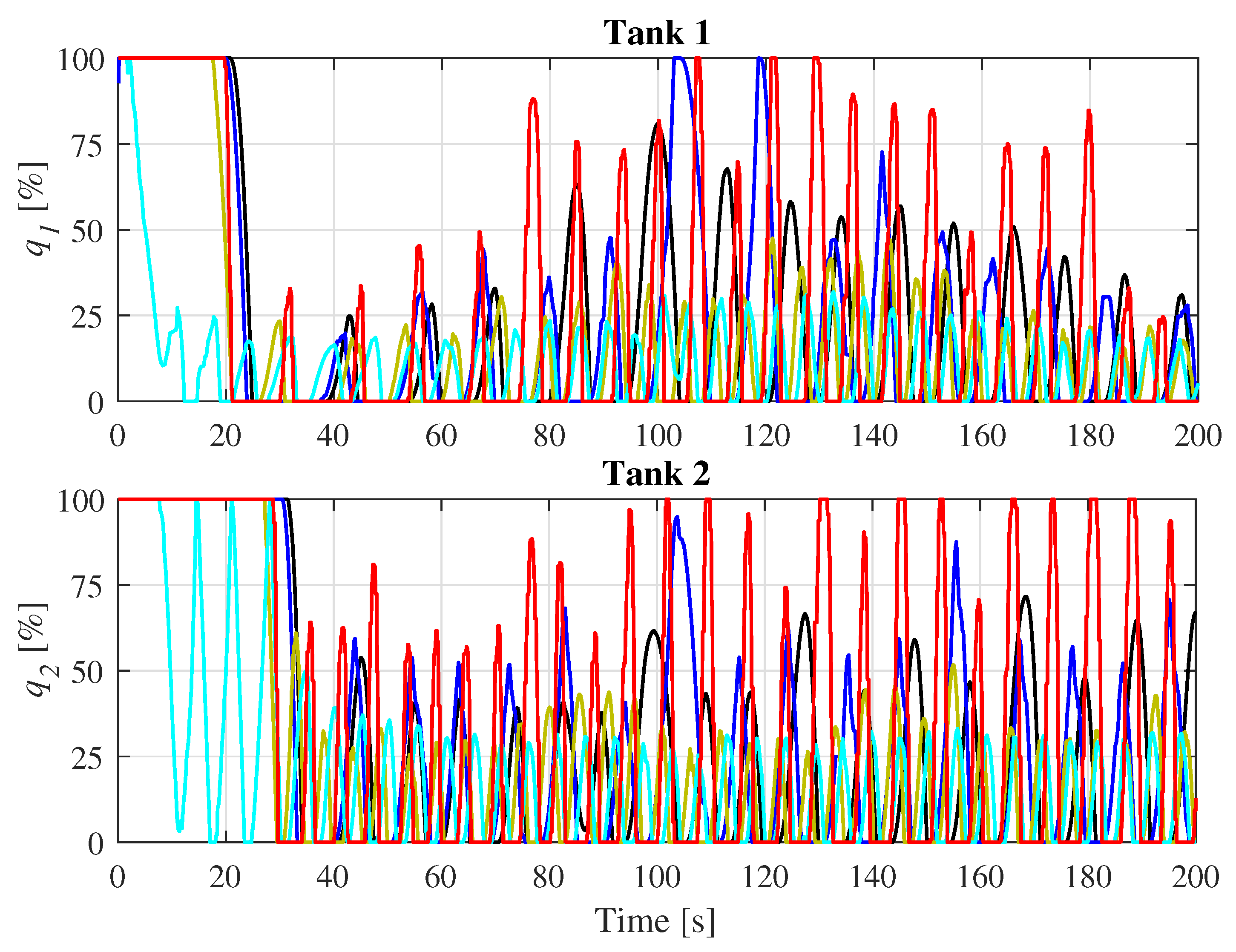
5.3. Comparison of Approaches for Multi-SISO System
6. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ioannou, P.; Fidan, B. Adaptive Control Tutorial; SIAM: Philadelphia, PA, USA, 2006. [Google Scholar]
- Bakhshande, F.; Söffker, D. Robust control approach for a hydraulic differential cylinder system using a Proportional-Integral-Observer-based backstepping control. In Proceedings of the 2017 American control conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 3102–3107. [Google Scholar]
- Hou, Z.; Jin, S. Model Free Adaptive Control; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Salighe, S.; Söffker, D. On the PID-structured model-free adaptive control: A comparison of different approaches. In Proceedings of the 2024 European Control Conference (ECC), Stockholm, Sweden, 25–28 June 2024; pp. 1309–1314. [Google Scholar]
- Hou, Z.; Jin, S. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Trans. Neural Netw. 2011, 22, 2173–2188. [Google Scholar] [PubMed]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control. Syst. Technol. 2010, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Zhu, Y. Controller-dynamic-linearization-based model free adaptive control for discrete-time nonlinear systems. IEEE Trans. Ind. Inform. 2013, 9, 2301–2309. [Google Scholar] [CrossRef]
- Pham, H.A.; Söffker, D. Modified Model-Free Adaptive Control using Compact-Form Dynamic Linearization Technique. IFAC-PapersOnLine 2020, 53, 3940–3945. [Google Scholar] [CrossRef]
- Li, J.; Wang, S.; Li, Y. A model-free adaptive controller with tracking error differential for collective pitching of wind turbines. Renew. Energy 2020, 161, 435–447. [Google Scholar] [CrossRef]
- Xiong, H.; Liao, Y.; Chu, X. Improved model free adaptive control for winding system. In Proceedings of the 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 396–401. [Google Scholar]
- Xiong, S.; Hou, Z. Model-free adaptive control for unknown MIMO nonaffine nonlinear discrete-time systems with experimental validation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 1727–1739. [Google Scholar] [CrossRef] [PubMed]
- Roman, R.C.; Radac, M.B.; Precup, R.E. Data-driven model-free adaptive control of twin rotor aerodynamic systems. In Proceedings of the 9th IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 15–17 May 2014; pp. 25–30. [Google Scholar]
- Zen, Z.; Cao, R.; Hou, Z. MIMO model free adaptive control of two degree of freedom manipulator. In Proceedings of the 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 693–697. [Google Scholar]
- Li, Z.; Jin, S.; Xu, C.; Li, J. Model-free adaptive predictive control for an urban road traffic network via perimeter control. IEEE Access 2019, 7, 172489–172495. [Google Scholar] [CrossRef]
- Guo, Y.; Hou, Z.; Liu, S.; Jin, S. Data-driven model-free adaptive predictive control for a class of MIMO nonlinear discrete-time systems with stability analysis. IEEE Access 2019, 7, 102852–102866. [Google Scholar] [CrossRef]
- Hou, Z.; Liu, S.; Tian, T. Lazy-learning-based data-driven model-free adaptive predictive control for a class of discrete-time nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 1914–1928. [Google Scholar] [CrossRef]
- Wang, Y.; Hou, M. Model-free adaptive integral terminal sliding mode predictive control for a class of discrete-time nonlinear systems. ISA Trans. 2019, 93, 209–217. [Google Scholar] [CrossRef] [PubMed]
- Ji, H.; Wei, Y.; Fan, L.; Liu, S.; Wang, Y.; Wang, L. Disturbance-d Model-Free Adaptive Prediction Control for Discrete-Time Nonlinear Systems with Time Delay. Symmetry 2021, 13, 2128. [Google Scholar] [CrossRef]
- Tan, H.; Wang, Y.; Wu, M.; Huang, Z.; Miao, Z. Distributed group coordination of multiagent systems in cloud computing systems using a model-free adaptive predictive control strategy. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 3461–3473. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Li, J.; Hou, Z.; Meng, Q.; Li, M. Composite Model-free Adaptive Predictive Control for Wind Power Generation Based on Full Wind Speed. CSEE J. Power Energy Syst. 2020, 8, 1659–1669. [Google Scholar]
- Li, D.; De Schutter, B. Distributed model-free adaptive predictive control for urban traffic networks. IEEE Trans. Control. Syst. Technol. 2021, 30, 180–192. [Google Scholar] [CrossRef]
- Antonelli, G. Interconnected dynamic systems: An overview on distributed control. IEEE Control. Syst. Mag. 2013, 33, 76–88. [Google Scholar]
- Ioannou, P.; Kokotovic, P. Decentralized adaptive control of interconnected systems with reduced-order models. Automatica 1985, 21, 401–412. [Google Scholar] [CrossRef]
- Zhu, Y.; Qian, F.; Hou, Z.; Jin, S. Data-driven model free adaptive control for a class of interconnected systems. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Sabah, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Qi, J.; Cao, R.; Hou, Z.; Zhou, H. The model-free adaptive control for complex connected systems in the H-type motion platform. In Proceedings of the 2017 6th Data Driven Control and Learning Systems (DDCLS), Chongqing, China, 26–27 May 2017; pp. 129–134. [Google Scholar]
- Li, Y.; Hou, Z.; Hao, J. Decentralized model-free adaptive control for signalized intersections network. IFAC Proc. Vol. 2013, 46, 88–93. [Google Scholar] [CrossRef]
- Liu, Y.; Söffker, D. Improvement of optimal high-gain PI-observer design. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 4564–4569. [Google Scholar]
- Madadi, E.; Dong, Y.; Söffker, D. Comparison of different model-free control methods concerning real-time benchmark. J. Dyn. Syst. Meas. Control. 2018, 140, 121014. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, C.; Lu, J. Parameter self-tuning of SISO compact-form model-free adaptive controller based on long short-term memory neural network. IEEE Access 2020, 8, 151926–151937. [Google Scholar] [CrossRef]
- Liu, S.; Jia, X.; Ji, H.; Fan, L. Parameter optimization design of MFAC based on Reinforcement Learning. In Proceedings of the 2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS), Xiangtan, China, 12–14 May 2023; pp. 1036–1043. [Google Scholar]
- Roman, R.C.; Radac, M.B.; Precup, R.E.; Petriu, E.M. Data-driven model-free adaptive control tuned by virtual reference feedback tuning. Acta Polytech. Hung. 2016, 13, 83–96. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables/Parameters | Definitions | Range/Unit |
|---|---|---|
| Water level of tanks 1, 2, and 3 | m | |
| Input flow of tanks 1 and 2 | ||
| Outlets from tanks 3 and 2 | ||
| , | Outflow from tanks 1 and 2 to tank 3 | |
| , | Outflow coefficients of the pipes from tanks 1 and 2 to tank 3 | |
| , | Outlet coefficients of tanks 3 and 2 | |
| Cross-sectional area of tanks 1, 2, and 3 | ||
| , | Cross-sectional area of the outflow pipes from tanks 1 and 2 to tank 3 | |
| Cross-sectional area of the outlet pipes from tanks 2 and 3 | ||
| g | Gravitational acceleration |
| Controller | Color | Parameters | ||||
|---|---|---|---|---|---|---|
| MFAC-CFDL | 0.9 | 1 | - | - | - | |
| MFAC-PFDL | 0.9 | 1 | - | - | 10 | |
| MMFAC-CFDL | 0.9 | 1 | 20 | 0.1 | - | |
| MMFAC-PFDL | 0.1 | 1 | 20 | 0.1 | 10 | |
| MFAPC-CFDL | 0.9 | 1 | - | - | - | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salighe, S.; Trivedi, N.; Bakhshande, F.; Söffker, D. Decoupled Model-Free Adaptive Control with Prediction Features Experimentally Applied to a Three-Tank System Following Time-Varying Trajectories. Automation 2024, 5, 527-544. https://doi.org/10.3390/automation5040030
Salighe S, Trivedi N, Bakhshande F, Söffker D. Decoupled Model-Free Adaptive Control with Prediction Features Experimentally Applied to a Three-Tank System Following Time-Varying Trajectories. Automation. 2024; 5(4):527-544. https://doi.org/10.3390/automation5040030
Chicago/Turabian StyleSalighe, Soheil, Nehal Trivedi, Fateme Bakhshande, and Dirk Söffker. 2024. "Decoupled Model-Free Adaptive Control with Prediction Features Experimentally Applied to a Three-Tank System Following Time-Varying Trajectories" Automation 5, no. 4: 527-544. https://doi.org/10.3390/automation5040030
APA StyleSalighe, S., Trivedi, N., Bakhshande, F., & Söffker, D. (2024). Decoupled Model-Free Adaptive Control with Prediction Features Experimentally Applied to a Three-Tank System Following Time-Varying Trajectories. Automation, 5(4), 527-544. https://doi.org/10.3390/automation5040030