
Neural Network-Based Classifier for Collision Classification and Identification for a 3-DOF Industrial Robot



Abstract
1. Introduction
1.1. Related Work
1.2. The Main Contribution
2. Material and Methods
- (1)
- (2)
- The structure of PR-NN consists of a input layer, hidden layer, and output layer. The number of inputs and neurons of the hidden layer are determined;
- (3)
- Searching for the best number of neurons of the hidden layer which leads to a lower cross-entropy value and consequently a higher performance. Many trials are conducted to obtain this best number of neurons.
- (4)
- There is a need for testing and validation of the trained PR-NN to ensure its performance so that it can precisely classify collisions. Other data, rather than those used to train the PR-NN, are used to test and validate the PR-NN. When testing and validation show a high performance (lower cross-entropy), this reveals that the PR-NN is ready to make the classifications;
- (5)
- A comparison is made between the classification approach proposed in this paper and other approaches proposed in some other publications.
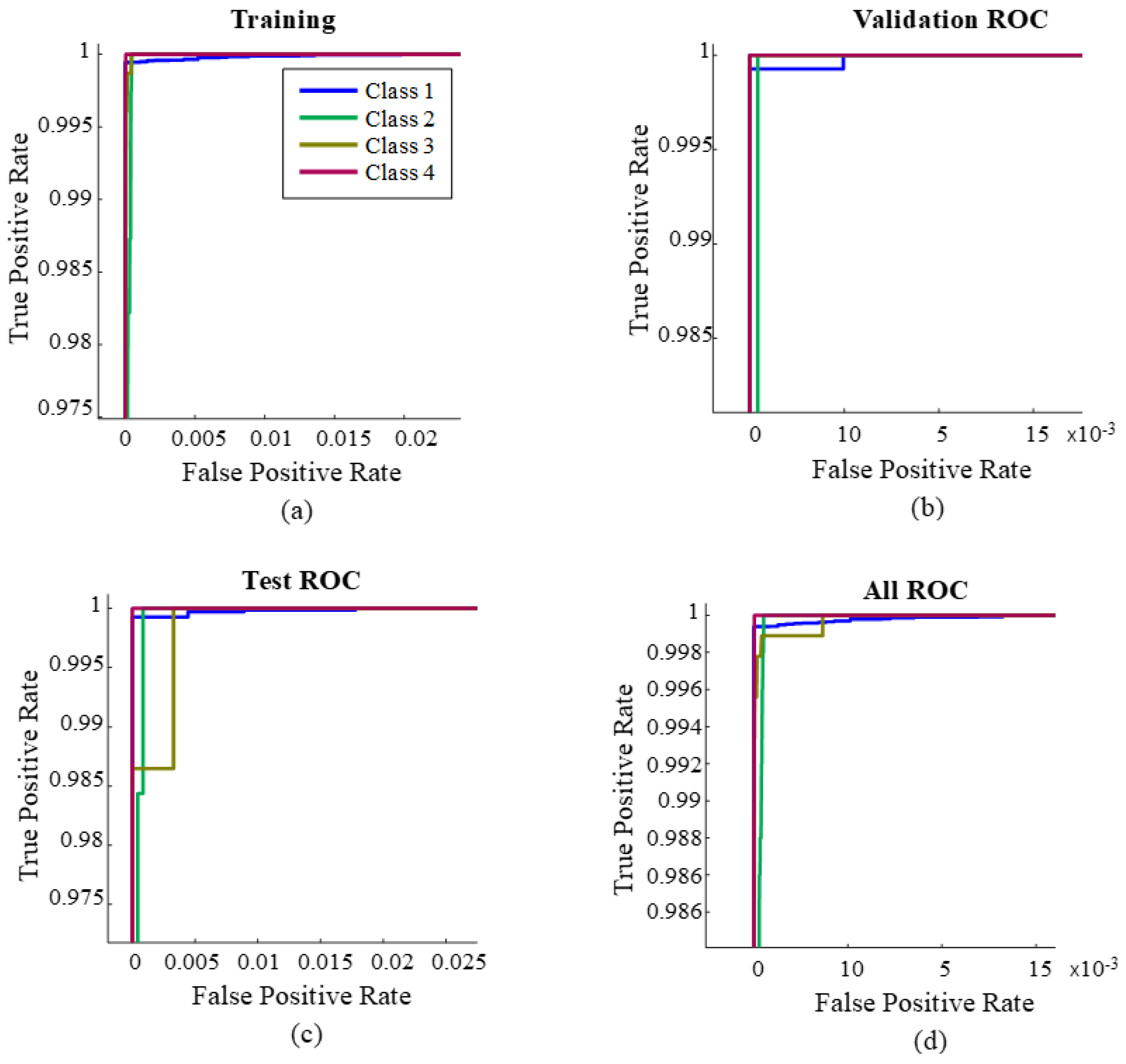
3. Results
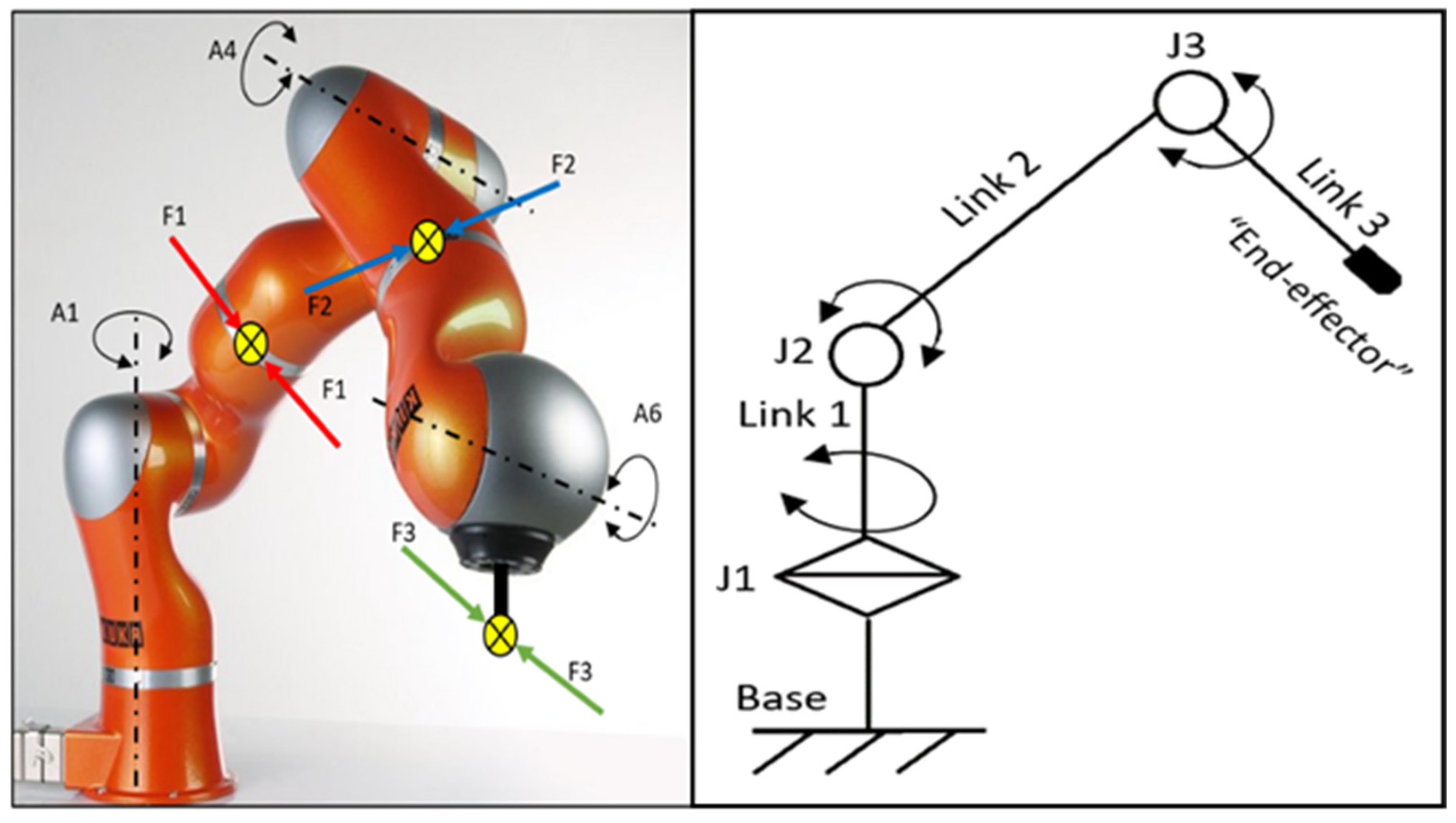
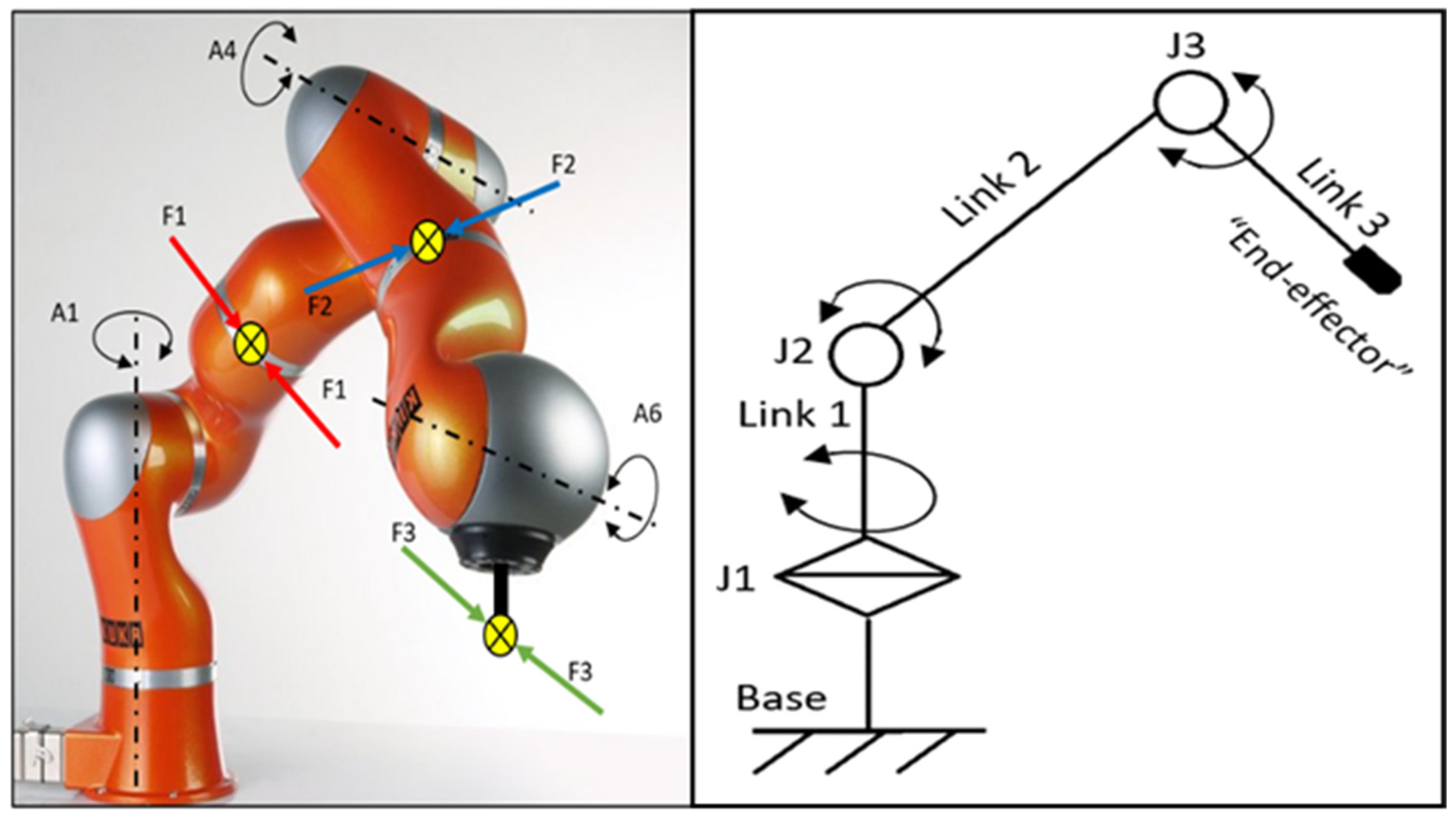
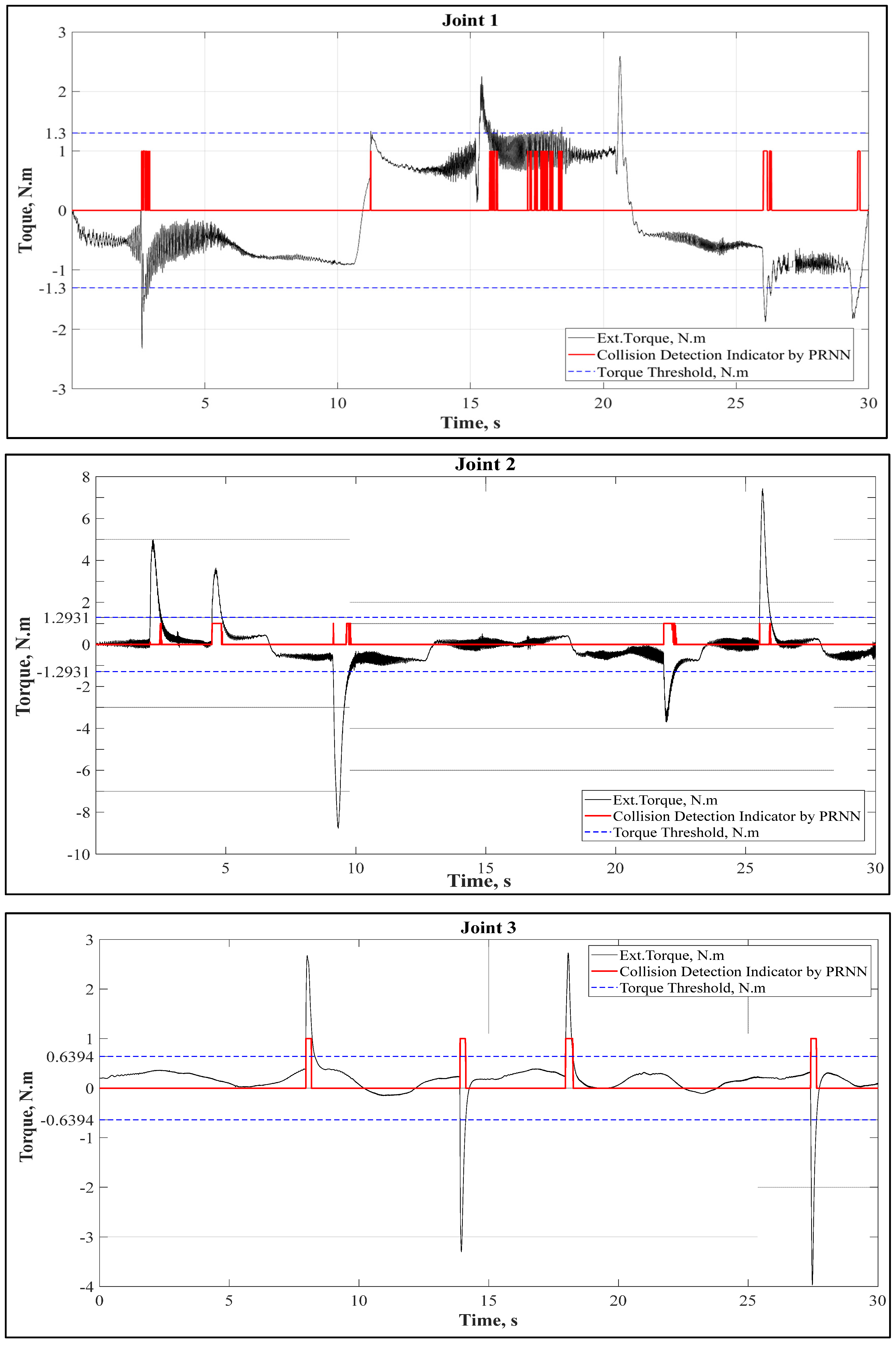
3.1. Experimental Work
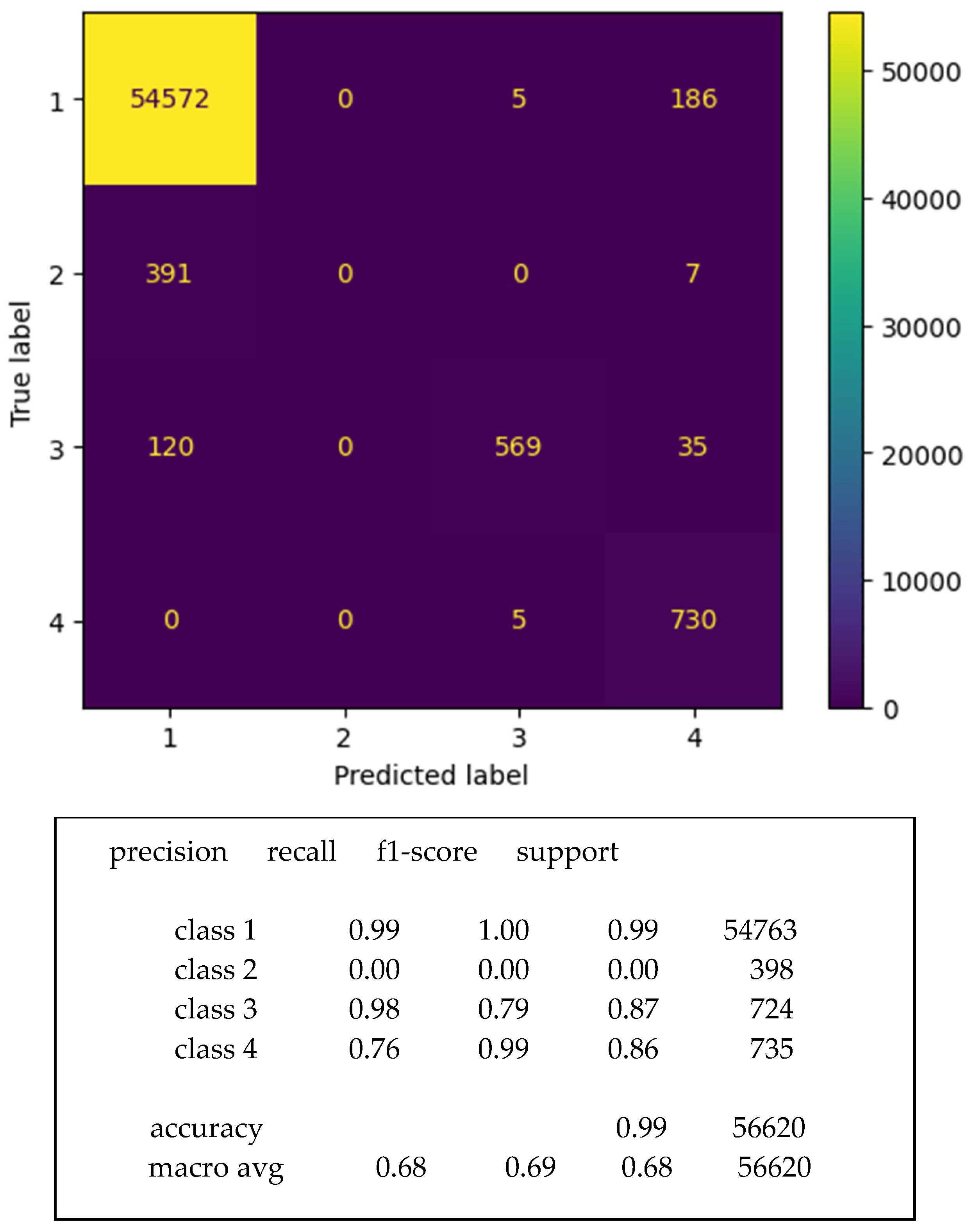
- Class (1): No collisions: this means no collision torques exerted by any joint;
- Class (2): Collision on Link 1: this means there is collision torque exerted on Joint 1 only;
- Class (3): Collision on Link 2: this means there are collision torques exerted on Joints 1 and 2;
- Class (4): Collision on Link 3: this means there are collision torques exerted on Joints 1, 2, and 3.
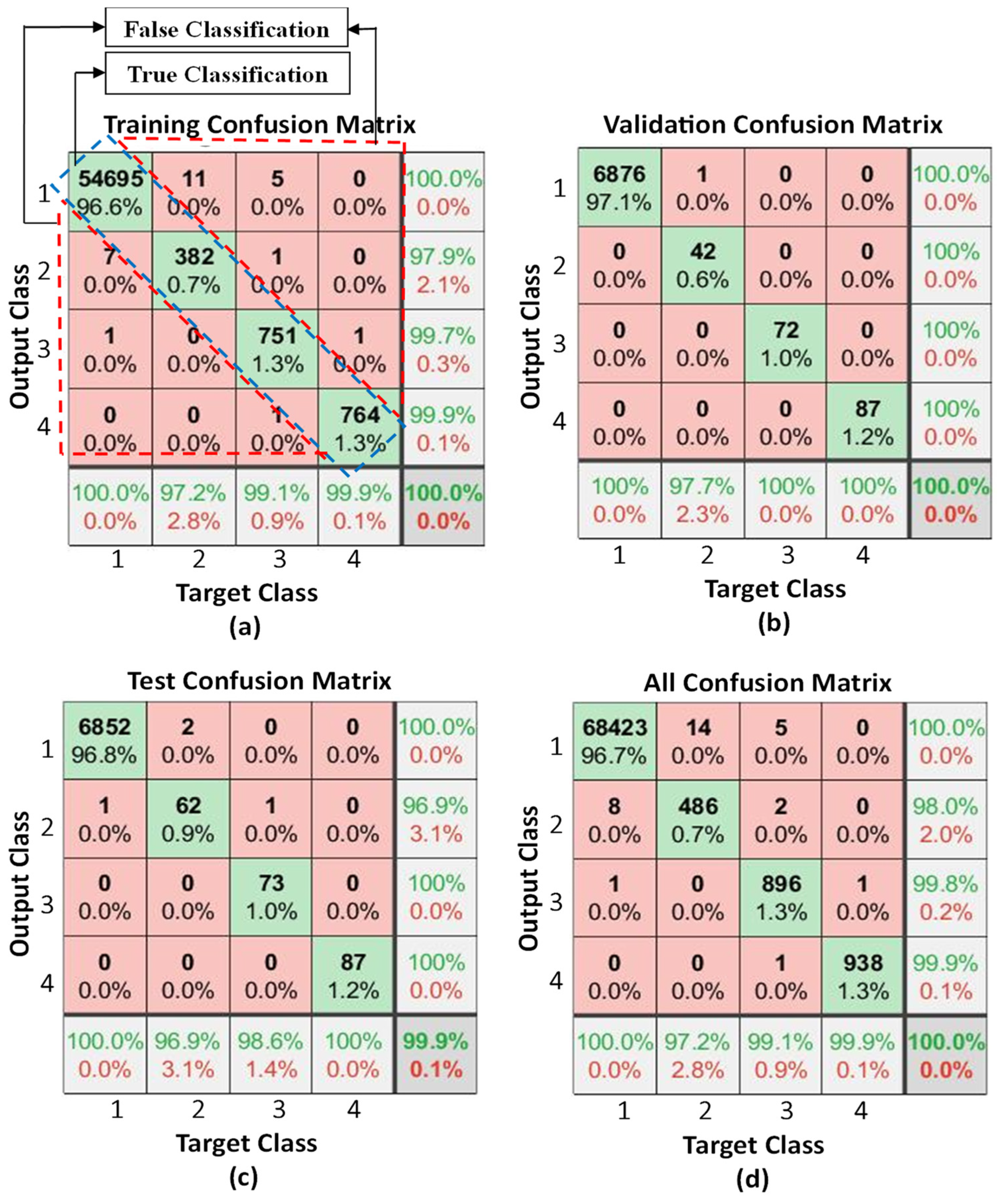
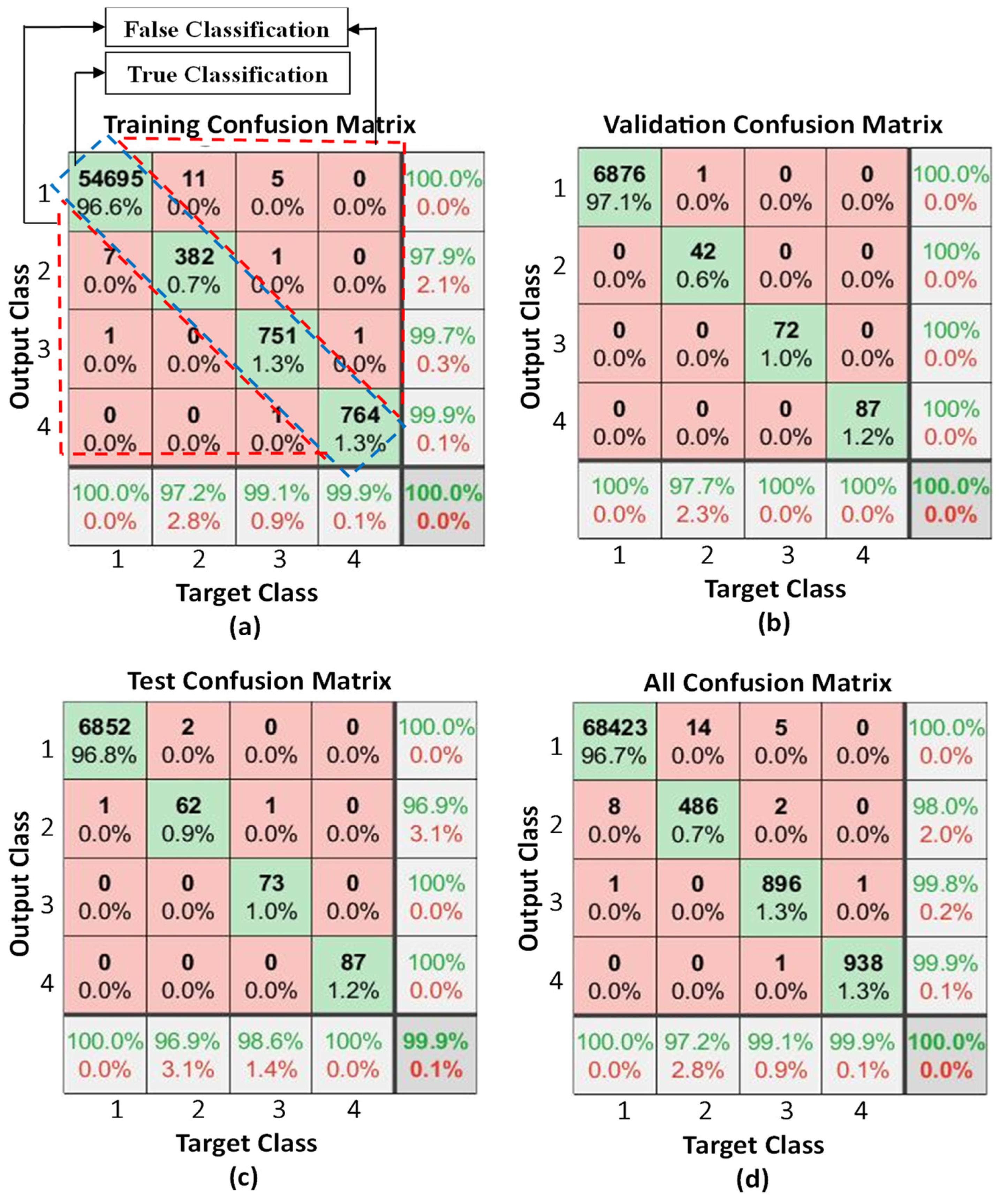
3.2. Experimental Results
- (1)
- The number of hidden neurons, at which the lowest cross-entropy is achieved, is 120;
- (2)
- The number of iteration/epochs at which the training process ended and the lowest cross-entropy was achieved is 232 epochs;
- (3)
- The lowest cross-entropy achieved is 0.00026922;
- (4)
- The time of training is about 19 s. It does not matter what time spent is to complete the training process. The process was accomplished offline. Thus, the prominent issue is to produce a PR-NN model achieving a higher performance.
- True positive (TP) cell: both the actual value and the predicted value are positive;
- True negative (TN) cell: the actual and predicted values are both negative;
- False positive (FP) cell: the actual value is negative, but the model predicted value is positive;
- False negative (FN) cell: the actual value is positive, but the model predicted value is negative.
- Case (1): No collisions detected on any link;
- Case (2): Collisions detected on Link 1;
- Case (3): Collisions detected on Link 2;
- Case (4): Collisions detected on Link 3.
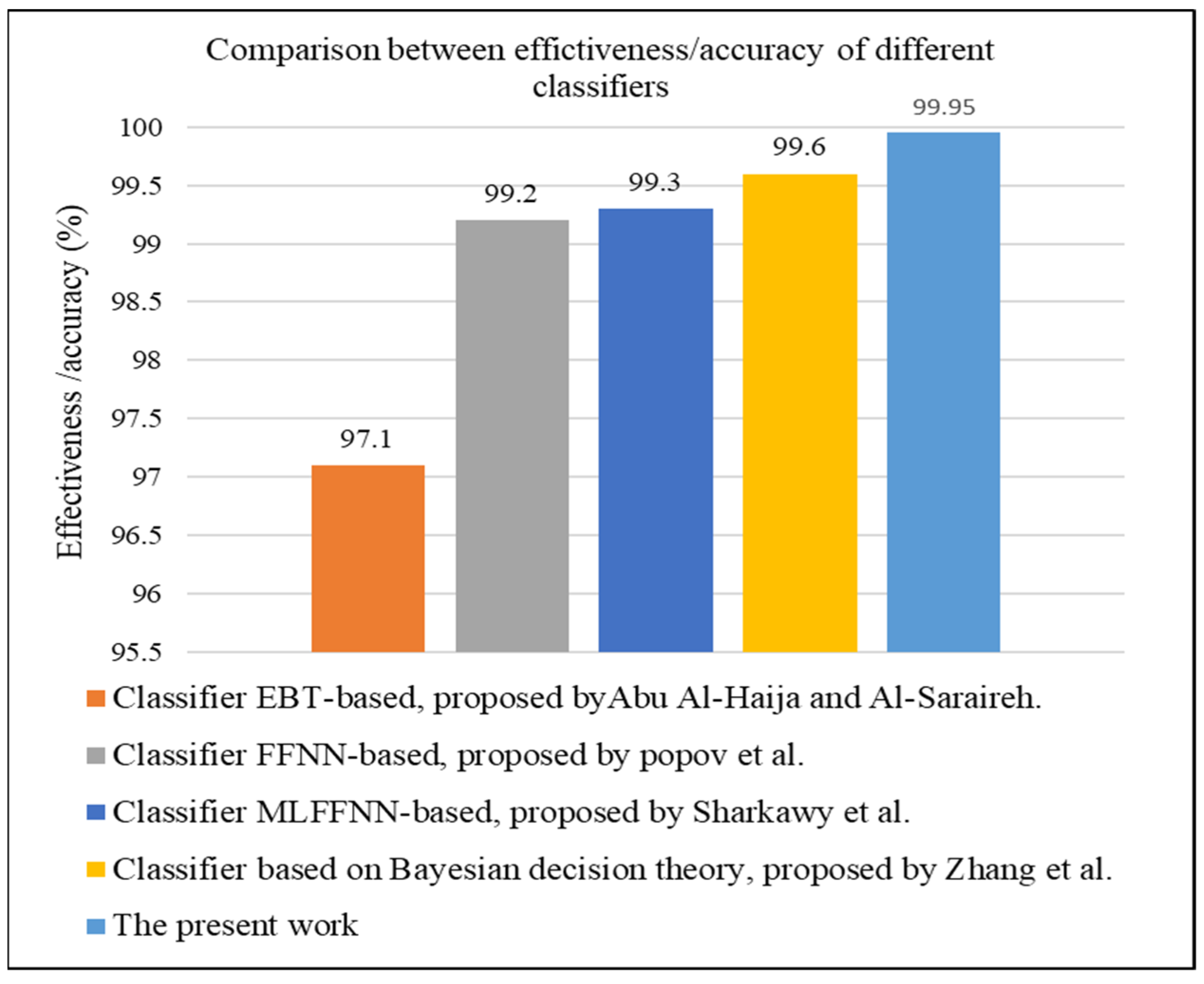
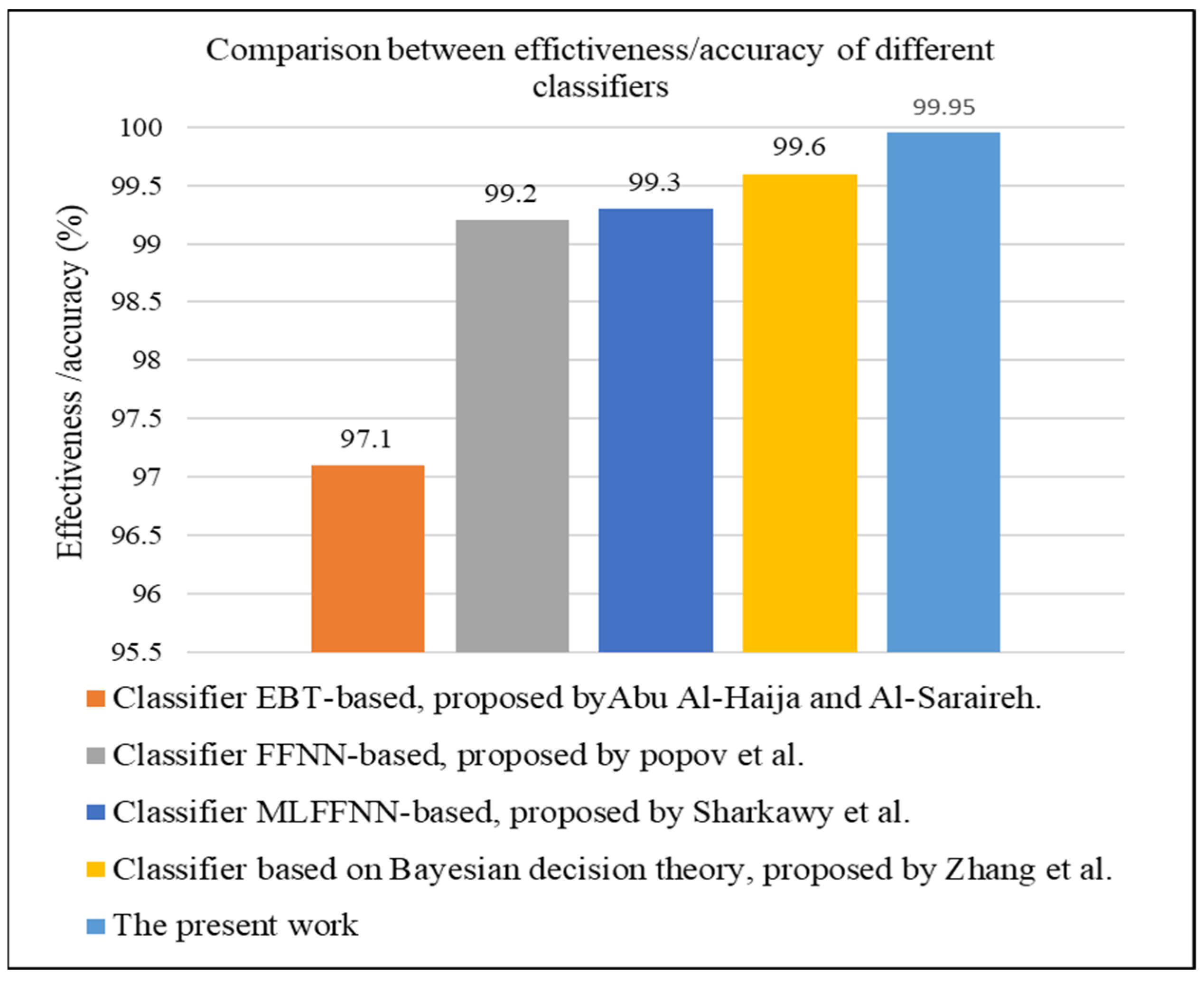
4. Discussion and Comparisons
4.1. General Comparison with Literature
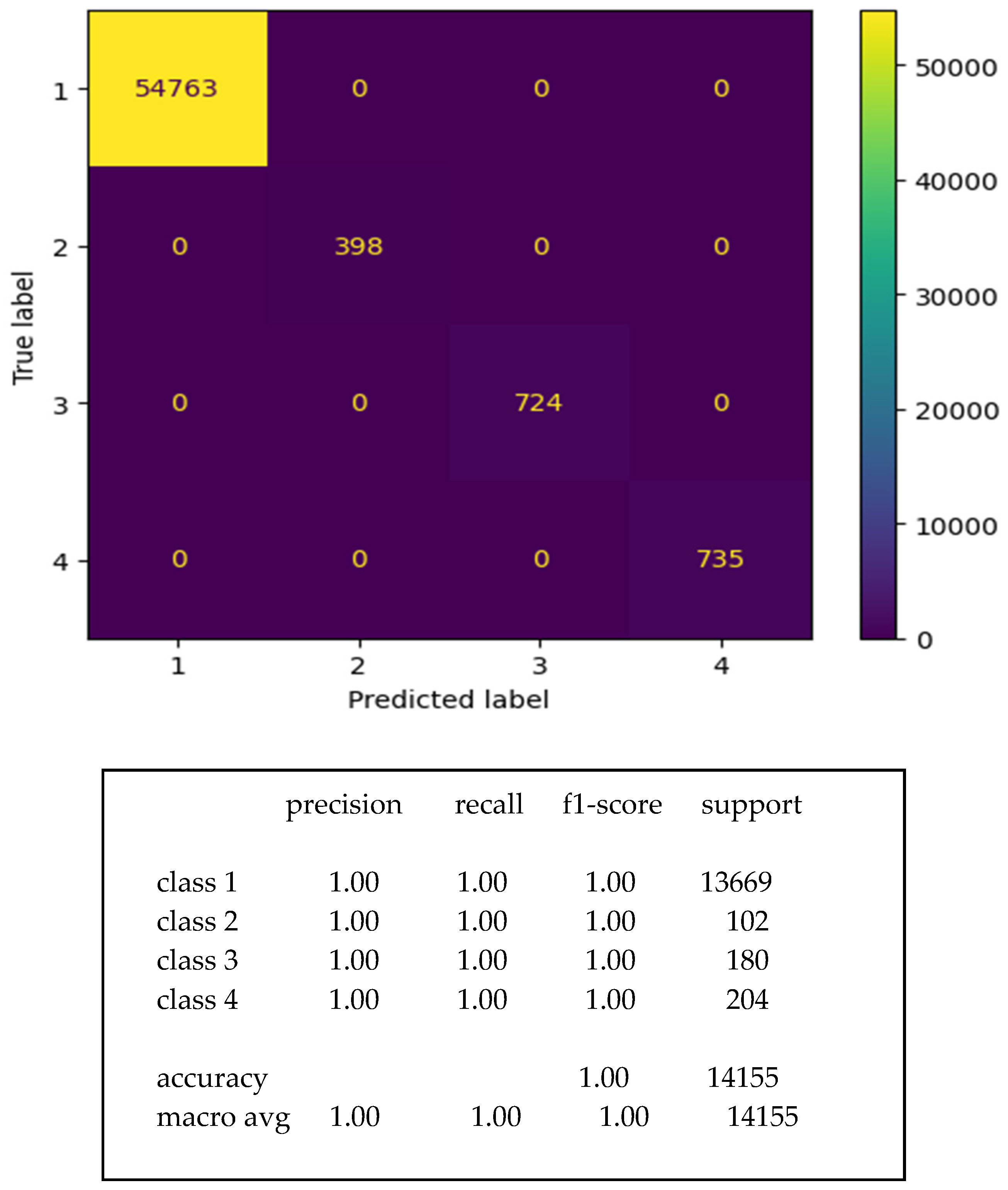
4.2. Experimental Validation for Comparison
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
List of Appreciations
| PR-NN | pattern recognition neural network |
| RNN | recurrent neural network |
| pHRI | physical human–robot interaction |
| HRI | human–robot interaction |
| CDI | collision detection and identification |
| SVM | support vector machine |
| IR sensor | infrared sensor |
| HRC | human–robot collaboration |
| ROC | receiver operating characteristics |
| NN | neural network |
| MLFFNN | multi-layer feedforward neural network |
| FFNN | feedforward neural network |
| EBT | ensemble of bagging trees |
| KNN | k-nearest neighbor |
| FDT | fine decision trees |
| LRK | logistic regression kernels |
Appendix A. Performance of the Tried PR-NN Models

References
- Krüger, J.; Lien, T.; Verl, A. Cooperation of human and machines in assembly lines. CIRP Ann. 2009, 58, 628–646. [Google Scholar] [CrossRef]
- Boddington, P. EPSRC Principles of Robotics: Commentary on safety, robots as products, and responsibility. Connect. Sci. 2017, 29, 170–176. [Google Scholar] [CrossRef]
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef]
- Vasic, M.; Billard, A. Safety issues in human-robot interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar]
- ISO 10218-1:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots. ISO: Geneva, Switzerland, 2011.
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. ISO: Geneva, Switzerland, 2011.
- Avanzini, G.B.; Ceriani, N.M.; Zanchettin, A.M.; Rocco, P.; Bascetta, L. Safety Control of Industrial Robots Based on a Distributed Distance Sensor. IEEE Trans. Control Syst. Technol. 2014, 22, 2127–2140. [Google Scholar] [CrossRef]
- Bdiwi, M. Integrated Sensors System for Human Safety during Cooperating with Industrial Robots for Handing-over and Assembling Tasks. Procedia CIRP 2014, 23, 65–70. [Google Scholar] [CrossRef]
- Luca, A.D.; Flacco, F. Integrated control for pHRI: Collision avoidance, detection, reaction and collaboration. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 288–295. [Google Scholar]
- Geravand, M.; Flacco, F.; De Luca, A. Human-robot physical interaction and collaboration using an industrial robot with a closed control architecture. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4000–4007. [Google Scholar]
- Cioffi, G.; Klose, S.; Wahrburg, A. Data-Efficient Online Classification of Human-Robot Contact Situations. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 608–614. [Google Scholar]
- Wang, X.; Yang, C.; Ju, Z.; Ma, H.; Fu, M. Robot manipulator self-identification for surrounding obstacle detection. Multimed. Tools Appl. 2017, 76, 6495–6520. [Google Scholar] [CrossRef]
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. Human–robot collisions detection for safe human–robot interaction using one multi-input–output neural network. Soft Comput. 2020, 24, 6687–6719. [Google Scholar] [CrossRef]
- Sharkawy, A.-N.; Ma’arif, A.; Furizal; Sekhar, R.; Shah, P. A Comprehensive Pattern Recognition Neural Network for Collision Classification Using Force Sensor Signals. Robotics 2023, 12, 124. [Google Scholar] [CrossRef]
- Chen, Y.; Liao, H.-Y.; Behdad, S.; Hu, B. Human activity recognition in an end-of-life consumer electronics disassembly task. Appl. Ergon. 2023, 113, 104090. [Google Scholar] [CrossRef]
- Popov, D.; Klimchik, A.; Mavridis, N. Collision detection, localization & classification for industrial robots with joint torque sensors. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 838–843. [Google Scholar]
- Zhang, Z.; Qian, K.; Schuller, B.W.; Wollherr, D. An Online Robot Collision Detection and Identification Scheme by Supervised Learning and Bayesian Decision Theory. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1144–1156. [Google Scholar] [CrossRef]
- Narukawa, K.; Yoshiike, T.; Tanaka, K.; Kuroda, M. Real-time collision detection based on one class SVM for safe movement of humanoid robot. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 791–796. [Google Scholar]
- Shin, D.; Na, S.Y.; Kim, J.Y.; Baek, S.-J. Fuzzy neural networks for obstacle pattern recognition and collision avoidance of fish robots. Soft Comput. 2008, 12, 715–720. [Google Scholar] [CrossRef]
- Abu Al-Haija, Q.; Al-Saraireh, J. Asymmetric Identification Model for Human-Robot Contacts via Supervised Learning. Symmetry 2022, 14, 591. [Google Scholar]
- Mahmoud, K.H.; Sharkawy, A.N.; Abdel-Jaber, G.T. Development of safety method for a 3-DOF industrial robot based on recurrent neural network. J. Eng. Appl. Sci. 2023, 70, 44. [Google Scholar]
- Nawi, N.M.; Ransing, R.S.; Ransing, M.R. An improved conjugate gradient based learning algorithm for back propagation neural networks. Int. J. Comput. Inf. Eng. 2008, 2, 2062–2071. [Google Scholar]
- Nubert, J.; Koehler, J.; Berenz, V.; Allgower, F.; Trimpe, S. Safe and Fast Tracking on a Robot Manipulator: Robust MPC and Neural Network Control. IEEE Robot. Autom. Lett. 2020, 5, 3050–3057. [Google Scholar] [CrossRef]
- Soriano, L.A.; Zamora, E.; Vazquez-Nicolas, J.M.; Hernández, G.; Madrigal, J.A.B.; Balderas, D. PD control compensation based on a cascade neural network applied to a robot manipulator. Front. Neurorobot. 2020, 14, 577749. [Google Scholar] [CrossRef]
- Liu, Q.; Li, D.; Ge, S.S.; Ji, R.; Ouyang, Z.; Tee, K.P. Adaptive bias RBF neural network control for a robotic manipulator. Neurocomputing 2021, 447, 213–223. [Google Scholar] [CrossRef]
- Liu, Q.; Li, D.; Ge, S.S.; Ji, R.; Ouyang, Z.; Tee, K.P. A robust collision prediction and detection method based on neural network for autonomous delivery robots. ETRI J. 2023, 45, 329–337. [Google Scholar]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef]
- Elbelady, S.; Fawaz, H.; Aziz, A.A. Online self tuning PID control using neural network for tracking control of a pneumatic cylinder using pulse width modulation piloted digital valves. Int. J. Mech. Mechatron. Eng. IJMME-IJENS 2016, 16, 123–136. [Google Scholar]
- Baroni, M. Linguistic generalization and compositionality in modern artificial neural networks. Philos. Trans. R. Soc. B 2020, 375, 20190307. [Google Scholar] [CrossRef]
- Jin, Y.; Hou, L.; Lu, Z.; Chen, Y. Crack Fault Diagnosis and Location Method for a Dual-Disk Hollow Shaft Rotor System Based on the Radial Basis Function Network and Pattern Recognition Neural Network. Chin. J. Mech. Eng. 2023, 36, 35. [Google Scholar] [CrossRef]
- Jin, Y.; Hou, L.; Lu, Z.; Chen, Y. Cross-entropy loss functions: Theoretical analysis and applications. arXiv 2023, arXiv:2304.07288. [Google Scholar]
- Banerjee, K.; Gupta, R.R.; Vyas, K.; Mishra, B. Exploring alternatives to softmax function. arXiv 2020, arXiv:2011.11538. [Google Scholar]
- Aich, A.; Dutta, A.; Chakraborty, A. A scaled conjugate gradient backpropagation algorithm for keyword extraction. In Proceedings of the Information Systems Design and Intelligent Applications: Proceedings of Fourth International Conference INDIA 2017, Da Nang, Vietnam, 15–17 June 2017; Springer: Berlin/Heidelberg, Germany, 2018; pp. 674–684. [Google Scholar]
- Johansson, E.; Dowla, F.; Goodman, D. Backpropagation learning for multilayer feed-forward neural networks using the conjugate gradient method. Int. J. Neural Syst. 1991, 2, 291–301. [Google Scholar] [CrossRef]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Rachakonda, A.R.; Bhatnagar, A. ARatio: Extending area under the ROC curve for probabilistic labels. Pattern Recognit. Lett. 2021, 150, 265–271. [Google Scholar] [CrossRef]
- Bhattacharjee, J.; Santra, S.; Deyasi, A. Chapter 10-Novel detection of cancerous cells through an image segmentation approach using principal component analysis. In Recent Trends in Computational Intelligence Enabled Research; Bhattacharyya, S., Dutta, P., Samanta, D., Mukherjee, A., Pan, I., Eds.; Academic Press: Cambridge, MA, USA, 2021; pp. 171–195. [Google Scholar]
- Das, C.; Sahoo, A.K.; Pradhan, C. Chapter 12-Multicriteria recommender system using different approaches. In Cognitive Big Data Intelligence with a Metaheuristic Approach; Mishra, S., Tripathy, H.K., Mallick, P.K., Sangaiah, A.K., Chae, G.-S., Eds.; Academic Press: Cambridge, MA, USA, 2022; pp. 259–277. [Google Scholar]
- Li, Z.; Ren, K.; Yang, Y.; Jiang, X.; Yang, Y.; Li, D. Towards Inference Efficient Deep Ensemble Learning. arXiv 2023, arXiv:2301.12378. [Google Scholar] [CrossRef]
- Jeffares, A.; Liu, T.; Crabbé, J.; van der Schaar, M. Joint training of deep ensembles fails due to learner collusion. Adv. Neural Inf. Process. Syst. 2024, 36, 1. [Google Scholar]
- Rish, I. An empirical study of the naive Bayes classifier. In Proceedings of the IJCAI 2001 Workshop on Empirical Methods in Artificial Intelligence, Seattle, WA, USA, 4–10 August 2001; pp. 41–46. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of layers | Three layers: input, hidden, and output layers. |
| Number of inputs | Nine inputs: the position of joint, previous position of joint, and angular velocity of joint, for Joints 1, 2, and 3. |
| Activation function of hidden layer | Tanh (hyperbolic tangent)—hidden layer is nonlinear |
| Number of hidden neurons | 80 |
| Number of outputs | Three outputs; force sensor signal, external torque of Joint 1 and of Joint 2 |
| Activation function of output layer | Non-linear |
| Training algorithm | Levenberg–Marquardt (LM) |
| Total collected samples | 70,776 samples |
| Number of training samples | 80% of total samples |
| Number of validation samples | 10% of total samples |
| Number of testing samples | 10% of total samples |
| Processer used for training | Intel(R) Core (TM) i7-7500U CPU @ 2.70GHz 2.90 GHz |
| Software used for training | MATLAB |
| Number of epochs | 1000 |
| Criterion considered for the training | Considering the lowest mean square error MSE. Consequently, the smallest MSE means that the model is the highest accuracy to estimate the external torque. |
| The smallest (MSE) | 0.03173 |
| Regression obtained from training | 0.96797 |
| Process | Number of Samples (Samples without Collision+ Samples with Collision) | Sample without Collision | Samples with Collision |
|---|---|---|---|
| Training | 56,619 | 54,711 | 1908 |
| Testing | 7069 | 6854 | 215 |
| Validation | 7078 | 6877 | 201 |
| Number of Hidden Neurons | 40 | 80 | 120 | 160 | 200 |
|---|---|---|---|---|---|
| Cross-entropy | 0.00059 | 0.00071 | 0.00026 | 0.00060 | 0.00058 |
| Predicted Classes | ||||
|---|---|---|---|---|
| Positive | Negative | |||
| Actual Classes | Positive | True Positive (TP) | False Negative (FN) | Sensitivity |
| Negative | False Positive (FP) | True Negative (TN) | Specificity | |
| Precision | Negative predictive value | Accuracy/Effectiveness | ||
| Author’s Name | Robot’s DOF | Method Based on | Inputs Used to Train the Classifier Model | Application |
|---|---|---|---|---|
| Sharkawy et al. [14] | KUKA 2-DOF | MLFFNN | Three inputs: signal of estimated external force sensor and signals of the estimated external torques on both robot joints. | There is no need for torque signals to classify collisions, so it can be used for any serial robot. |
| Popov et al. [16] | 7-DOF | FFNN | Five inputs: joint positions, commanded joints positions, joints torque, external joints torque, and end-effector Cartesian positions. | As torque sensors are urgently needed to make the classification, this method is restricted to being used for collaborative robots which are equipped with joint torque sensors. |
| Zhang et al. [17] | 7-DOF | Bayesian decision theory | Seven inputs: torque signals transmitted from torque sensors on the seven joints. | As torque sensors are urgently needed to make the classification, this method is restricted to being used for collaborative robots which are equipped with joint torque sensors. |
| Abu Al-Haija and Al-Saraireh [20] | 7-DOF | EBT | Four inputs: torque, position, and velocity of joints. | As torque sensors are urgently needed to make the classification, this method is restricted to being used for collaborative robots which are equipped with joint torque sensors. |
| The present work | 3-DOF | PR-NN | Three inputs: signals of the estimated external torques on the three robot joints. | There is no need for torque signals to classify collisions, so it can be used for any serial robot. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmoud, K.H.; Abdel-Jaber, G.T.; Sharkawy, A.-N. Neural Network-Based Classifier for Collision Classification and Identification for a 3-DOF Industrial Robot. Automation 2024, 5, 13-34. https://doi.org/10.3390/automation5010002
Mahmoud KH, Abdel-Jaber GT, Sharkawy A-N. Neural Network-Based Classifier for Collision Classification and Identification for a 3-DOF Industrial Robot. Automation. 2024; 5(1):13-34. https://doi.org/10.3390/automation5010002
Chicago/Turabian StyleMahmoud, Khaled H., G. T. Abdel-Jaber, and Abdel-Nasser Sharkawy. 2024. "Neural Network-Based Classifier for Collision Classification and Identification for a 3-DOF Industrial Robot" Automation 5, no. 1: 13-34. https://doi.org/10.3390/automation5010002
APA StyleMahmoud, K. H., Abdel-Jaber, G. T., & Sharkawy, A.-N. (2024). Neural Network-Based Classifier for Collision Classification and Identification for a 3-DOF Industrial Robot. Automation, 5(1), 13-34. https://doi.org/10.3390/automation5010002