Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Context and Motivation
- (i)
- the commonly invoked assumption of about the continuity of the fault profile that breaks the sliding motion;
- (ii)
- the proof of stability when an anti-windup strategy is embedded in the SMC architecture (when such a unit is considered, which is rarely the case); and
- (iii)
- the non-existence of a separation principle when using a fault estimator to schedule the control law, which is the most encountered solution to ensure fault tolerance with SMC techniques, as shown below.
2. The Genesis of Sliding Mode Control Theory
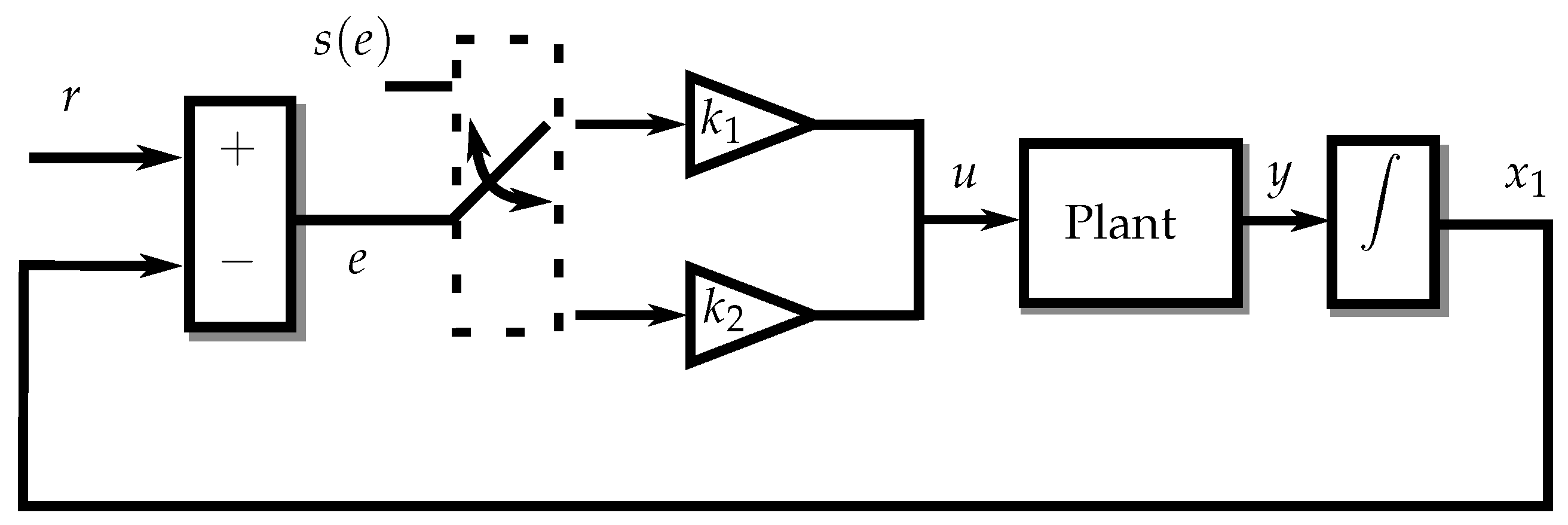
3. The Fundamental Principle of SMC Techniques
- The linear part of the controller is in charge of maintaining the sliding motion. Typically, the nominal equivalent control or a state feedback is employed for . It is designed based on the nominal system, that is with .
- The nonlinear (discontinuous) part is in charge of compensating and inducing the sliding motion.
4. The Five Generations of SMC Techniques
4.1. First Order Sliding Mode Control (FOSMC)
4.2. Second-Order Sliding Mode Approaches
4.2.1. Twisting Algorithm TA
4.2.2. Terminal Sliding Mode TSM
4.2.3. Super-Twisting Algorithm STA
4.2.4. Variable Gain Super-Twisting Algorithm VGSTA
4.2.5. Generalized Super-Twisting Algorithm GSTA
4.2.6. Differentiator
4.3. Arbitrary-Order Sliding Mode Approaches
4.3.1. Arbitrary-Order Differentiator
4.3.2. Continuous Nested Sliding Mode Algorithm (CNSMA)
4.4. A Few Remarks
- Adaptive Sliding Mode Controllers: In the previous sections, the tuning of the described controllers is shown to be dependent on the bound of the disturbance (see, e.g., (34)). One may assume that, when the bound of the disturbance is unknown or variable, the gains of the controllers can be selected with an overestimated bound. The consequence would be an increment in the chattering effect. Adaptive Sliding Mode Controllers (ASMC)s were developed with the aim of having a robust controller, even when the bound of the disturbance is unknown or in the case the disturbance is time-varying. Their main design principle is to adjust the gains of the controller to maintain the sliding motion, depending only on the information that is available. In the literature, different approaches towards applying adaptation to SMC can be found (see, e.g., [42,43] where the coefficients of the switching plane are varied without information of the plant with the aim of improving the systems response). Recent research in this field is dedicated to the proposal of a solution that considers reducing the chattering effect (see, e.g., [44,45,46,47,48,49,50] where the adaptation principles are applied to STA, TA, arbitrary order SMC, TSM, and observers).
- Output Tracking: For the output tracking problem, the control design procedure is the same as explained in the previous sections. The main difference is the definition of the switching function, given that it is based on the tracking error. Following the example shown by Shtessel et al. [7], consider the following system:where represents the bounded disturbances/uncertainties, and the bound is assumed to be known. The reference trajectory is defined as . The tracking error is then defined as . The switching function is defined based on the tracking error as:
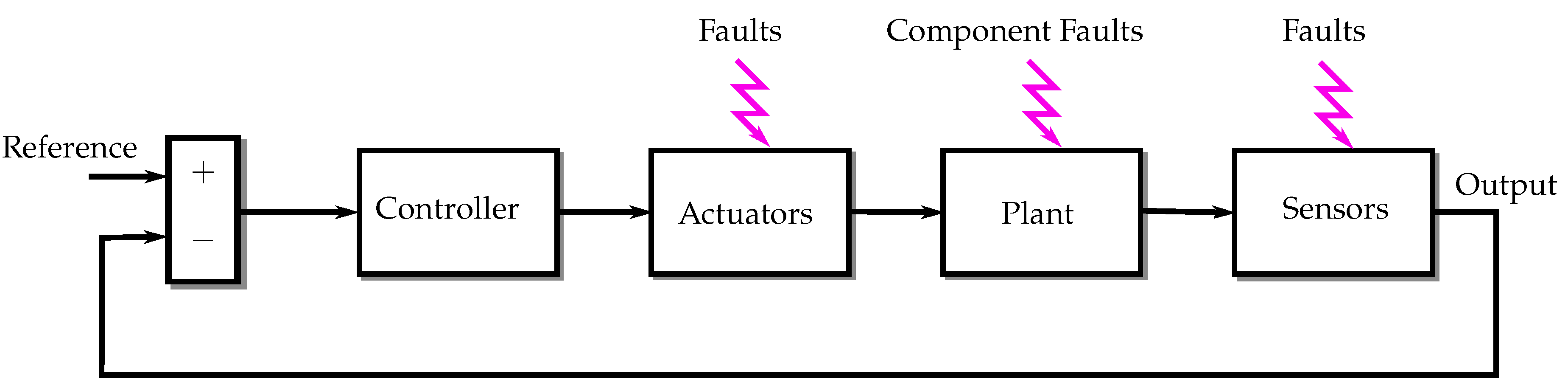
5. Fault Tolerant Control and SMC Techniques
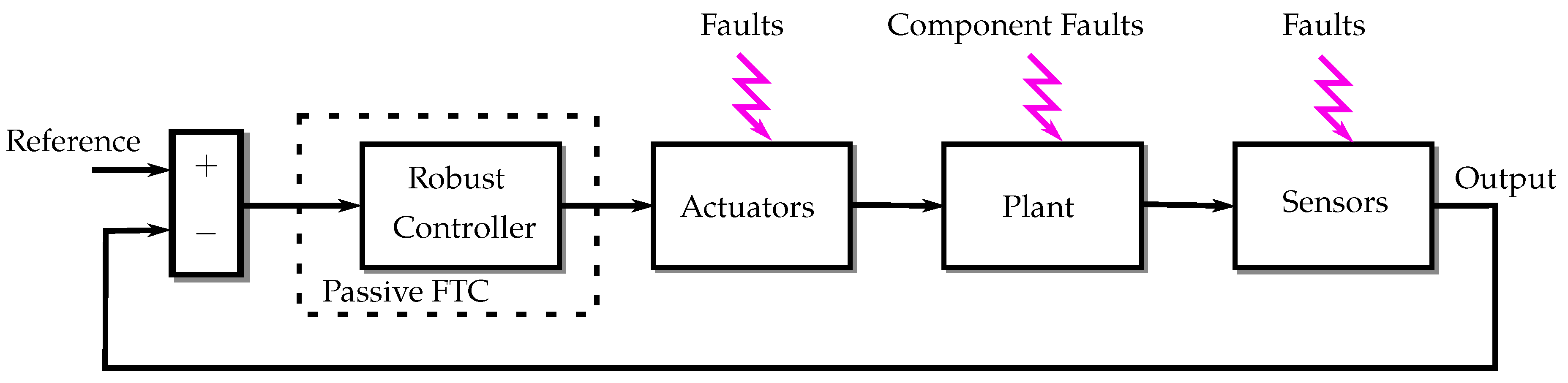
- Passive techniques consider that possible system failures are known. The controller is thus developed to cover the a priori known characteristics of a set of pre-specified faults. Given that the controller stays fixed during the systems operation, this makes passive approaches less complex, considering that the robustness properties of the so-designed controller are exploited (see Figure 4). As a consequence, the type of faults that the robust controller can compensate is limited. However, their lack of complexity is an advantage during implementation, given that they have fewer software/hardware requirements.
- Active techniques reconfigure the control parameters in the presence of a fault. They rely on a Fault Detection and Isolation (FDI) unit (see Figure 5). FDI is in charge of the constant monitoring of the status of the system and its components. In this way, when the FDI unit identifies a fault, a reconfiguration is carried out in the controller. As a result, a wider range of faults can be compensated and many control techniques have the potential to be used for fault tolerant control, e.g., both within the LTI and linear parameter varying setting, control allocation, dynamic inversion, adaptive methods, neural networks, and model predictive control, to mention a few. One limitation of this scheme is that it has limited time to perform FDI followed by control reconfiguration. In addition, the accuracy of FDI affects the reconfiguration process. In other words, despite the existence of some stability and performance proofs for active FTC techniques, the main problem lies in guaranteeing stability and performances of the overall fault-tolerant scheme taking into account FDI performances (detection delay, possible false alarms, etc.), control specifications, and reconfiguration mechanism. Solutions to this problem are considered in [56,57]. The authors proposed to use the theory of switched systems based on the dwell-time concept to guarantee stability and fault accommodation, even in the case of false fault identification.
5.1. Modeling the Faults
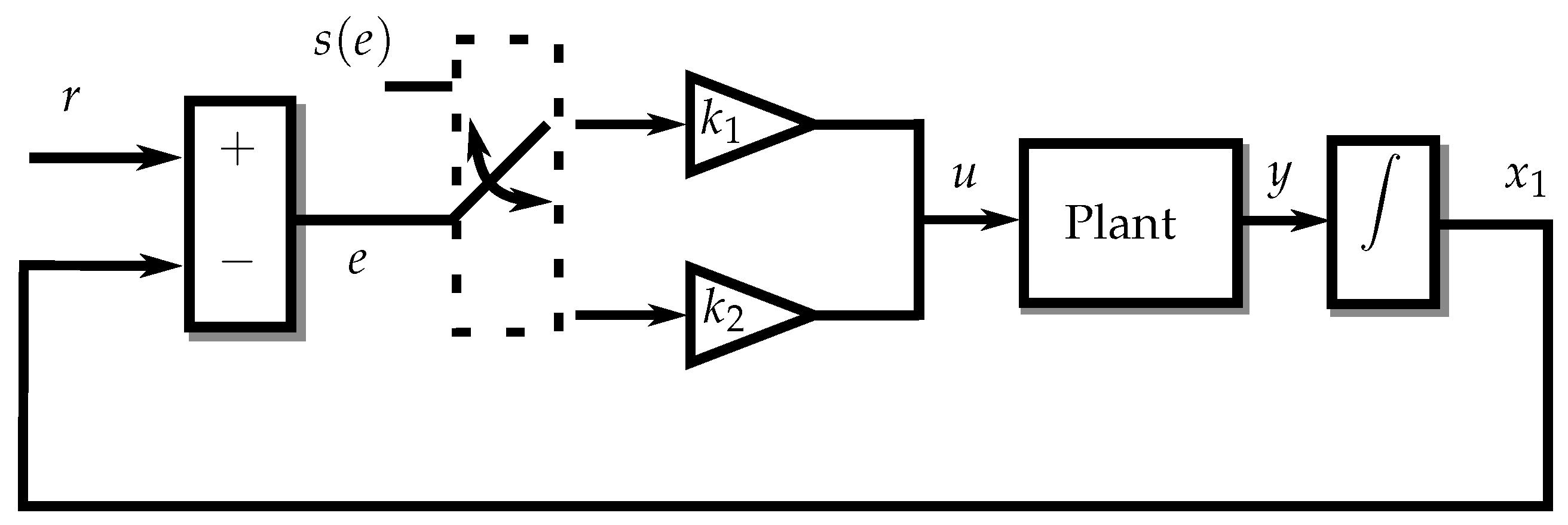
5.2. SMC Techniques as a Potential Solution for FTC
- If , then ; thus, it is immediate to see that from the FTC point of view that we are facing a large class of actuator faults since the fault profile f may be state-dependent. A particular case often encountered in the literature consists of faults being exogenous signals, i.e., . From the SMC point of view, f can be treated as (state-dependent) matched perturbations.
- If as in (77), then ; thus, we are faced with actuator faults where the ith column of K represents the fault mode of the ith actuator. From the SMC point of view, f is seen as unmatched perturbations.
- If , then the problem is concerned by component faults (see (74)). From a SMC point of view, we are facing unmatched perturbations.
- If f plays the role of matched perturbations, the control theories presented in Section 4.1, Section 4.2 and Section 4.3 can be applied with a few changes. That is why active and passive SMC-based FTC schemes have be proposed in the literature (see, e.g., [66,67,68,69,70,71] for passive and [72,73,74,75,76] for active FTC solutions). However, tuning the gains of the tSMC control law to ensure fault tolerance may lead to a high gain controller. This is in fact related to the outcomes discussed below about the assumption on and its successive time derivatives, and the problem of control saturation.
- If f plays the role of unmatched perturbations, it is required to use a fault reconstruction unit. This can be done by using either a (high-order sliding mode) observer or a differentiator on an adequate formulated problem (see Section 4.2.6 and Section 4.3.1). The models (77), (85), (86), (89), and (90) are generally used for that purpose (for studies that use this principle, see [18,48,64,65,77,78,79,80,81,82,83,84,85,86,87]).
- First, the following assumptions must be satisfied: the system (91)–(92) must be strongly observable, or, equivalently, the triplet has no invariant zeros; and depending on the SMC technique used for FTC and fault reconstruction, f and its derivatives up to a certain order (say r) may be bounded, i.e., , , or must be smooth at least.
- Second, because many SMC techniques are state-feedback control solutions, the state must be available. However, controllers such as the nested algorithm and quasi-continuous sliding-mode controller only require the relative degree and the measurement of one of the state variables.
- Third, fault accommodation is done at the expense of increasing the control actions, which may lead the control signal to go into saturation.
5.3. Applications of SMC for FTC in Real-World Systems
5.3.1. Robot Manipulators
5.3.2. Marine Vehicles
5.3.3. Aeronautical Applications
5.3.4. Space Applications
5.3.5. Notable Facts
- Almost all current SMC-based FTC solutions are based on the ASMC principle, as described in Section 5.2, i.e., a fault estimator is used to schedule a SMC law. It is interesting to note that the most popular control scheme is the TSM control solution and its variants, i.e., the fast and nonsingular fast versions.
- Many papers do not consider the problem of control signal saturation. The majority of contributions in this field are developed for space applications.
- No papers (or almost none) have proposed a solution to relax the assumption about the discontinuity of the fault profile. The considered faults are manly concerned by loss-of-efficiency or smooth fault profiles.
- Finally, no papers have established a formal proof of the existence of a separation principle when using a fault estimator, even if it is mainly used as the fault tolerance principle. This means that the coupling between the dynamics of the fault estimator and the SMC law is not sufficiently studied, in our opinion.
6. Conclusions
- (i)
- the case of discontinuous faults, since, by definition, such faults do not respect the assumption about the bound required by the sliding-mode controller to maintain the sliding-motion, and to not test again a transient process of finite-duration;
- (ii)
- the proof of stability when an anti-windup strategy is joint to the SMC architecture (when such a unit is considered, which is rarely the case); and
- (iii)
- the non-existence of a separation principle when using a fault estimator.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, X.; Jiang, J. A survey of fault-tolerant controllers based on safety-related issues. Annu. Rev. Control 2015, 39, 46–57. [Google Scholar] [CrossRef]
- Sato, M.; Hardier, G.; Ferreres, G.; Edwards, C.; Alwi, H.; Chen, L.; Marcos, A. Fault Tolerance - Background and Recent Trends. J. Soc. Instrum. Control. Eng. 2018, 57, 279–286. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A review of Fault Tolerant Control Systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A Survey on Active Fault-Tolerant Control Systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Riaz, U.; Tayyeb, M.; Amin, A.A. A Review of Sliding Mode Control with the Perspective of Utilization in Fault Tolerant Control. Recent Adv. Electr. Electron. Eng. 2020, 13, 1–13. [Google Scholar] [CrossRef]
- Levant, A. Universal single-input-single-output (SISO) sliding-mode controllers with finite-time convergence. IEEE Trans. Autom. Control 2001, 46, 1447–1451. [Google Scholar] [CrossRef] [Green Version]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: Berlin/Heidelberg, Germany, 2014; Volume 10. [Google Scholar]
- Fridman, L.; Moreno, J.A.; Bandyopadhyay, B.; Kamal, S.; Chalanga, A. Continuous nested algorithms: The fifth generation of sliding mode controllers. In Recent Advances in Sliding Modes: From Control to Intelligent Mechatronics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 5–35. [Google Scholar]
- Emel’yanov, S. On Pecularities of Variables Structure Control Systems with Discontinuous Switching Functions; Doklady ANSSR: Moscow, Russia, 1963; Volume 153, pp. 776–778. [Google Scholar]
- Emelyanov, S. Variable Structure Control Systems; Nauka: Moscow, Russia, 1967. (In Russian) [Google Scholar]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes and Their Applications in Variable Structure Systems; Mir Publishers: Moscow, Russia, 1978; p. 257. [Google Scholar]
- Feng, Y.; Yu, X.; Han, F. On nonsingular terminal sliding-mode control of nonlinear systems. Automatica 2013, 49, 1715–1722. [Google Scholar] [CrossRef]
- Davila, J. Exact tracking using backstepping control design and high-order sliding modes. IEEE Trans. Autom. Control 2013, 58, 2077–2081. [Google Scholar] [CrossRef]
- Davila, J.; Fridman, L.; Pisano, A.; Usai, E. Finite-time state observation for non-linear uncertain systems via higher-order sliding modes. Int. J. Control 2009, 82, 1564–1574. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer. Automatica 2007, 43, 1605–1614. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Matthews, G.; DeCarlo, R. Decentralized tracking for a class of interconnected nonlinear systems using variable structure control. Automatica 1988, 24, 187–193. [Google Scholar] [CrossRef]
- Utkin, V.; Shi, J. Integral sliding mode in systems operating under uncertainty conditions. In Proceedings of the Conference on Decision and Control, Kobe, Japan, 13 December 1996; pp. 4591–4596. [Google Scholar]
- Hamayun, M.T.; Edwards, C.; Alwi, H. Fault Tolerant Control Schemes Using Integral Sliding Modes; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Castanos, F.; Fridman, L. Analysis and Design of Integral Sliding Manifolds for Systems With Unmatched Perturbations. IEEE Trans. Autom. Control. 2006, 51, 853–858. [Google Scholar] [CrossRef] [Green Version]
- Bezzaoucha, S.; Henry, D. An LMI approach for the Integral Sliding Mode and H∞ State Feedback Control Problem. J. Phys. Conf. Ser. 2015, 659, 012052. [Google Scholar] [CrossRef]
- Chalanga, A.; Kamal, S.; Bandyopadhyay, B. Continuous integral sliding mode control: A chattering free approach. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–6. [Google Scholar]
- Kamal, S.; Chalanga, A.; Bandyopadhyay, B.; Kumar P, R. Multivariable continuous integral sliding mode control. In Proceedings of the 2015 International Workshop on Recent Advances in Sliding Modes (RASM), Istanbul, Turkey, 9–11 April 2015; pp. 1–5. [Google Scholar]
- Levant, A. Higher Order Sliding Modes and Their Application for Controlling Uncertain Processes; Institute for System Studiesof the USSR Acadamy of Science: Moscow, Russia, 1987. [Google Scholar]
- Emel’yanov, S.V.; Korovin, S.; Levantovskii, L.V. Higher-order sliding modes in binary control systems. Sov. Phys. Dokl. 1986, 31, 291. [Google Scholar]
- Venkataraman, S.; Gulati, S. Control of nonlinear systems using terminal sliding modes. J. Dyn. Sys. Meas. Control 1993, 115, 554–560. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control. 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Gonzalez, T.; Moreno, J.A.; Fridman, L. Variable gain super-twisting sliding mode control. IEEE Trans. Autom. Control 2011, 57, 2100–2105. [Google Scholar] [CrossRef]
- Moreno, J.A. A linear framework for the robust stability analysis of a Generalized Super-Twisting Algorithm. In Proceedings of the 2009 6th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Toluca, Mexico, 10–13 January 2009; pp. 1–6. [Google Scholar]
- Castillo, I.; Fridman, L.; Moreno, J.A. Super-Twisting Algorithm in presence of time and state dependent perturbations. Int. J. Control 2018, 91, 2535–2548. [Google Scholar] [CrossRef]
- Levant, A. Introduction to high-order sliding modes. Sch. Math. Sci. Isr. 2003, 58, 1. [Google Scholar]
- Emelyanov, S. Higher order sliding modes in the binary control systems. Sov. Phys. Dokl. 1986, 4, 291–293. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Seeber, R.; Horn, M. Stability proof for a well-established super-twisting parameter setting. Automatica 2017, 84, 241–243. [Google Scholar] [CrossRef]
- Seeber, R.; Horn, M. Necessary and sufficient stability criterion for the super-twisting algorithm. In Proceedings of the 2018 15th International Workshop on Variable Structure Systems (VSS), Graz, Austria, 9–11 July 2018; pp. 120–125. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinearsystems with uncertain parameters. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Emelyanov, S.; Utkin, V.; Taran, V. Theory of systems with variable structure. Science 1970. [Google Scholar]
- Shtessel, Y.B.; Moreno, J.A.; Plestan, F.; Fridman, L.M.; Poznyak, A.S. Super-twisting adaptive sliding mode control: A Lyapunov design. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5109–5113. [Google Scholar]
- Harmouche, M.; Laghrouche, S.; Chitour, Y. Robust and adaptive higher order sliding mode controllers. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 6436–6441. [Google Scholar]
- Taleb, M.; Levant, A.; Plestan, F. Pneumatic actuator control: Solution based on adaptive twisting and experimentation. Control Eng. Pract. 2013, 21, 727–736. [Google Scholar] [CrossRef]
- González, J.A.; Barreiro, A.; Dormido, S.; Banos, A. Nonlinear adaptive sliding mode control with fast non-overshooting responses and chattering avoidance. J. Frankl. Inst. 2017, 354, 2788–2815. [Google Scholar] [CrossRef]
- Hmidi, R.; Brahim, A.B.; Hmida, F.B.; Sellami, A. Robust Fault Tolerant Control Design for Nonlinear Systems not Satisfying Matching and Minimum Phase Conditions. Int. J. Control Autom. Syst. 2020, 18, 2206–2219. [Google Scholar] [CrossRef]
- Efimov, D.; Edwards, C.; Zolghadri, A. Enhancement of adaptive observer robustness applying sliding mode techniques. Automatica 2016, 72, 53–56. [Google Scholar] [CrossRef] [Green Version]
- Chang, J.; Cieslak, J.; Guo, Z.; Henry, D. On the synthesis of a sliding-mode-observer-based adaptive fault-tolerant flight control scheme. ISA Trans. 2020. [Google Scholar] [CrossRef]
- Blanke, M.; Staroswiecki, M.; Wu, N. Concepts and methods in fault-tolerant control. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001. [Google Scholar]
- Lunze, J.; Richter, J. Control Reconfiguration: Survey of Methods and Open Problems; Technical Report; Ruhr-Universität Bochum, Lehrstuhl für Automatisierungstechnik und Prozessinformatik: Bochum, Germany, 2006. [Google Scholar]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Ann. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, M.; Staroswiecki, M. Diagnosis and Fault Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Zolghadri, A.; Henry, D.; Cieslak, J.; Efimov, D.; Goupil, P. Fault Diagnosis and Fault-Tolerant Control and Guidance for Aerospace Vehicles: From Theory to Application; Advances in Industrial Control; Springer: Berlin/Heidelberg, Germany, 2014; ISBN 978-1-4471-5312-2. [Google Scholar]
- Efimov, D.; Cieslak, J.; Henry, D. Supervisory fault-tolerant control with mutual performance optimization. Int. J. Adapt. Control. Signal Process. 2013, 27, 251–279. [Google Scholar] [CrossRef]
- Cieslak, J.; Efimov, D.; Henry, D. Transient management of a supervisory fault-tolerant control scheme based on dwell-time conditions. Int. J. Adapt. Control. Signal Process. 2015, 29, 123–142. [Google Scholar] [CrossRef]
- Henry, D. Fault Diagnosis of the Microscope Satellite Actuators using H∞/H_ Filters. AIAA J. Guid. Control. Dyn. 2008, 31, 699–711. [Google Scholar] [CrossRef]
- Henry, D. From fault diagnosis to recovery actions for aeronautic and aerospace missions: A model-based point of view. In Proceedings of the 23rd IAR Workshop on Advanced Control and Diagnosis, Coventry, UK, 27–28 November 2008. [Google Scholar]
- Henry, D. A norm-based point of view for fault diagnosis. Application to aerospace missions. In Proceedings of the 8th European Workshop on Advanced Control and Diagnosis, Ferrara, Italy, 18–19 November 2010; pp. 4–16. [Google Scholar]
- Fonod, R.; Henry, D.; Charbonnel, C.; Bornschlegl, E.; Losa, D.; Bennani, S. Robust FDI for fault-tolerant thrust allocation with application to spacecraft rendezvous. Control. Eng. Pract. 2015, 42, 12–27. [Google Scholar] [CrossRef]
- Frank, P.; Alcorta-Garcia, E.; Köppen-Seliger, B. Modelling for fault detection and Isolation versus Modelling for Control. Math. Comput. Model. Dyn. Syst. 2001, 7, 1–46. [Google Scholar] [CrossRef]
- Edwards, C.; Lombaerts, T.; Smaili, H. Fault Tolerant Flight Control: A Benchmark Challenge; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Ferreira De Loza, A.; Cieslak, J.; Henry, D.; Dávila, J.; Zolghadri, A. Sensor fault diagnosis using a non-homogeneous high-order sliding mode observer with application to a transport aircraft. IET Control Theory Appl. 2015, 598–607. [Google Scholar] [CrossRef]
- Ferreira, A.; Cieslak, J.; Henry, D.; Zolghadri, A.; Fridman, L. Output tracking of systems subjected to perturbations and a class of actuator faults based on HOSM observation and identification. Automatica 2014, 59, 200–205. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, B.; Patton, R.J.; Zhang, K. Decentralized Output Sliding-Mode Fault-Tolerant Control for Heterogeneous Multiagent Systems. IEEE Trans. Cybern. 2019, 50, 4934–4945. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J. Integrated fault estimation and fault-tolerant control for uncertain Lipschitz nonlinear systems. Int. J. Robust Nonlinear Control 2017, 27, 761–780. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J. A new strategy for integration of fault estimation within fault-tolerant control. Automatica 2016, 69, 48–59. [Google Scholar] [CrossRef]
- Davila, J.; Cieslak, J.; Henry, D.; Zolghadri, A.; Bejarano, F.J. A fault tolerant controller based on quasi-continuous high-order sliding mode technique. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 7529–7534. [Google Scholar]
- Merheb, A.R.; Noura, H.; Bateman, F. Design of passive fault-tolerant controllers of a quadrotor based on sliding mode theory. Int. J. Appl. Math. Comput. Sci. 2015, 25, 561–576. [Google Scholar] [CrossRef] [Green Version]
- Shen, Q.; Wang, D.; Zhu, S.; Poh, E.K. Integral-Type Sliding Mode Fault-Tolerant Control for Attitude Stabilization of Spacecraft. IEEE Trans. Control. Syst. Technol. 2015, 23, 1131–1138. [Google Scholar] [CrossRef]
- Hamayun, M.T.; Edwards, C.; Alwi, H. Design and analysis of an integral sliding mode fault-tolerant control scheme. IEEE Trans. Autom. Control 2011, 57, 1783–1789. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.S.D.; Chen, C.C.; Wu, Z.L. Study of nonsingular fast terminal sliding-mode fault-tolerant control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Chen, L.; Alwi, H.; Edwards, C. Development and evaluation of an integral sliding mode fault-tolerant control scheme on the RECONFIGURE benchmark. Int. J. Robust Nonlinear Control 2019, 29, 5314–5340. [Google Scholar] [CrossRef]
- Chen, L.; Edwards, C.; Alwi, H. Integral sliding mode fault-tolerant control allocation for a class of affine nonlinear system. Int. J. Robust Nonlinear Control 2019, 29, 565–582. [Google Scholar] [CrossRef]
- Chen, L.; Edwards, C.; Alwi, H.; Sato, M. Flight evaluation of a sliding mode online control allocation scheme for fault tolerant control. Automatica 2020, 114, 108829. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S.K.; Patton, R.J. Sliding mode observers for fault detection and isolation. Automatica 2000, 36, 541–553. [Google Scholar] [CrossRef]
- Chen, L.; Alwi, H.; Edwards, C. On the synthesis of an integrated active LPV FTC scheme using sliding modes. Automatica 2019, 110, 108536. [Google Scholar] [CrossRef]
- Yin, S.; Yang, H.; Kaynak, O. Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults. IEEE Trans. Autom. Control 2017, 62, 3551–3558. [Google Scholar] [CrossRef]
- Chu, Z.; Meng, F.; Zhu, D.; Luo, C. Fault reconstruction using a terminal sliding mode observer for a class of second-order MIMO uncertain nonlinear systems. ISA Trans. 2020, 97, 67–75. [Google Scholar] [CrossRef] [PubMed]
- Xiao, B.; Yin, S.; Gao, H. Reconfigurable tolerant control of uncertain mechanical systems with actuator faults: A sliding mode observer-based approach. IEEE Trans. Control. Syst. Technol. 2017, 26, 1249–1258. [Google Scholar] [CrossRef]
- Ferrara, A.; Incremona, G.P.; Sangiovanni, B. Sliding Mode Fault Diagnosis with Vision in the Loop for Robot Manipulators. In New Trends in Robot Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 81–105. [Google Scholar]
- Ríos, H.; Kamal, S.; Fridman, L.M.; Zolghadri, A. Fault tolerant control allocation via continuous integral sliding-modes: A HOSM-observer approach. Automatica 2015, 51, 318–325. [Google Scholar] [CrossRef]
- Dávila, J.; Cieslak, J.; Henry, D. Disturbance Observer-Based Fault-Tolerant Control for a Class of Additive Faults. In New Trends in Observer-Based Control; Elsevier: Amsterdam, The Netherlands, 2019; pp. 337–355. [Google Scholar]
- Chang, J.; Cieslak, J.; Davila, J.; Zolghadri, A.; Zhou, J. Analysis and design of second-order sliding-mode algorithms for quadrotor roll and pitch estimation. ISA Trans. 2017, 71, 495–512. [Google Scholar] [CrossRef]
- Chang, J.; Cieslak, J.; Dávila, J.; Zhou, J.; Zolghadri, A.; Guo, Z. A two-step approach for an enhanced quadrotor attitude estimation via IMU data. IEEE Trans. Control. Syst. Technol. 2017, 26, 1140–1148. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.J. A decoupling approach to integrated fault-tolerant control for linear systems with unmatched non-differentiable faults. Automatica 2018, 89, 290–299. [Google Scholar] [CrossRef]
- Castillo, I.; Steinberger, M.; Fridman, L.; Moreno, J.; Horn, M. Saturated Super-Twisting Algorithm based on Perturbation Estimator. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 7325–7328. [Google Scholar] [CrossRef]
- Golkani, M.A.; Koch, S.; Reichhartinger, M.; Horn, M. A novel saturated super-twisting algorithm. Syst. Control. Lett. 2018, 119, 52–56. [Google Scholar] [CrossRef]
- Seeber, R.; Horn, M. Guaranteeing Disturbance Rejection and Control Signal Continuity for the Saturated Super-Twisting Algorithm. IEEE Control Syst. Lett. 2019, 3, 715–720. [Google Scholar] [CrossRef] [Green Version]
- Murtaza, G.; Butt, Y.A.; Bhatti, A.I. Higher order sliding mode based control scheme for air path of diesel engine. In Proceedings of the 2016 International Conference on Emerging Technologies (ICET), Balaclava, Mauritius, 3–6 August 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Anjum, R.; Khan, I.; Yar, A.; Bhatti, A.I. Air-to-fuel ratio control of gasoline engines using smooth sliding mode algorithm. In Proceedings of the 2017 13th International Conference on Emerging Technologies (ICET), Islamabad, Pakistan, 27–28 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An Adaptive Backstepping Nonsingular Fast Terminal Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1448–1458. [Google Scholar] [CrossRef] [Green Version]
- Lee, Q.; Kang, H. Finite-Time Fault-Tolerant Control for a Robot Manipulator Based on Synchronous Terminal Sliding Mode Control. Appl. Sci. 2020, 10, 2998. [Google Scholar] [CrossRef]
- Lee, Q.; Kang, H. Implementation of Fault-Tolerant Control for a Robot Manipulator Based on Synchronous Sliding Mode Control. Appl. Sci. 2020, 10, 2534. [Google Scholar] [CrossRef] [Green Version]
- Vo, A.T.; Kang, H. A Novel Fault-Tolerant Control Method for Robot Manipulators Based on Non-Singular Fast Terminal Sliding Mode Control and Disturbance Observer. IEEE Access 2020, 8, 109388–109400. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite Time Fault Tolerant Control for Robot Manipulators Using Time Delay Estimation and Continuous Nonsingular Fast Terminal Sliding Mode Control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Li, H.; Cai, Y. On SFTSM control with fixed-time convergence. IET Control. Theory Appl. 2017, 11, 766–773. [Google Scholar] [CrossRef]
- Basin, M.; Panathula, C.B.; Shtessel, Y. Multivariable continuous fixed-time second-order sliding mode control: Design and convergence time estimation. IET Control. Theory Appl. 2017, 11, 1104–1111. [Google Scholar] [CrossRef]
- Van, M.; Ceglarek, D. Robust fault tolerant control of robot manipulators with global fixed-time convergence. J. Frankl. Inst. 2021, 358, 699–722. [Google Scholar] [CrossRef]
- Lv, T.; Zhou, J.; Wang, Y.; Gong, W.; Zhang, M. Sliding mode based fault tolerant control for autonomous underwater vehicle. Ocean Eng. 2020, 216, 107855. [Google Scholar] [CrossRef]
- Lakhekar, G.; Waghmare, L. Robust maneuvering of autonomous underwater vehicle: An adaptive fuzzy PI sliding mode control. Intell. Serv. Robot. 2017, 10, 195–212. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Li, H.; Li, T.S. Sliding mode fault-tolerant control for unmanned marine vehicles with signal quantization and time-delay. Ocean Eng. 2020, 215, 107882. [Google Scholar] [CrossRef]
- Hao, L.; Zhang, H.; Guo, G.; Li, H. Quantized Sliding Mode Control of Unmanned Marine Vehicles: Various Thruster Faults Tolerated With a Unified Model. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 1–15. [Google Scholar] [CrossRef]
- Wang, N.; Pan, X.; Su, S.F. Finite-time fault-tolerant trajectory tracking control of an autonomous surface vehicle. J. Frankl. Inst. 2020, 357, 11114–11135. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; Yin, B.; Liu, W. Adaptive terminal sliding mode based thruster fault tolerant control for underwater vehicle in time-varying ocean currents. J. Frankl. Inst. 2015, 352, 4935–4961. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Wang, Y.; Rogers, E. Design and Experimental Validation of an Adaptive Sliding Mode Observer-Based Fault-Tolerant Control for Underwater Vehicles. IEEE Trans. Control. Syst. Technol. 2019, 27, 2655–2662. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, S.; Yan, Y. Fixed-time velocity-free sliding mode tracking control for marine surface vessels with uncertainties and unknown actuator faults. Ocean Eng. 2020, 201, 107107. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, S.; Yan, Y.; Wu, D. Fixed-time output feedback sliding mode tracking control of marine surface vessels under actuator faults with disturbance cancellation. Appl. Ocean Res. 2020, 104, 102378. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive finite-time sliding mode control design for finite-time fault-tolerant trajectory tracking of marine vehicles with input saturation. J. Frankl. Inst. 2020, 357, 13593–13619. [Google Scholar] [CrossRef]
- Lanzon, A.; Freddi, A.; Longhi, S. Flight Control of a Quadrotor Vehicle Subsequent to a Rotor Failure. J. Guid. Control. Dyn. 2014, 37, 580–591. [Google Scholar] [CrossRef]
- Khattab, A.; Alwi, H.; Edwards, C. Mitigating total rotor failure in quadrotor using LPV based sliding mode control scheme. In Proceedings of the 2019 4th Conference on Control and Fault Tolerant Systems (SysTol), Casablanca, Morocco, 18–20 September 2019; pp. 98–103. [Google Scholar] [CrossRef]
- Hamadi, H.; Lussier, B.; Fantoni, I.; Francis, C.; Shraim, H. Comparative study of self tuning, adaptive and multiplexing FTC strategies for successive failures in an Octorotor UAV. Robot. Auton. Syst. 2020, 133, 103602. [Google Scholar] [CrossRef]
- Alwi, H.; Hamayun, M.T.; Edwards, C. An integral sliding mode fault tolerant control scheme for an octorotor using fixed control allocation. In Proceedings of the 2014 13th International Workshop on Variable Structure Systems (VSS), Nantes, France, 29 June–2 July 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C. Fault tolerant control of an octorotor using LPV based sliding mode control allocation. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 6505–6510. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y. Adaptive Sliding Mode Fault-Tolerant Control for an Unmanned Aerial Vehicle. Unmanned Syst. 2017, 5, 209–221. [Google Scholar] [CrossRef]
- Merheb, A.; Noura, H.; Bateman, F. Passive fault tolerant control of quadrotor UAV using regular and cascaded Sliding Mode Control. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 330–335. [Google Scholar] [CrossRef]
- Li, T.; Zhang, Y.; Gordon, B.W. Passive and active nonlinear fault-tolerant control of a quadrotor unmanned aerial vehicle based on the sliding mode control technique. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2013, 227, 12–23. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Fault-tolerant Control of Quadcopter UAVs Using Robust Adaptive Sliding Mode Approach. Energies 2018, 12, 95. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, F.; Mirzaei, M.; Gordon, B.W.; Zhang, Y. Fault tolerant control of a quadrotor UAV using sliding mode control. In Proceedings of the 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 239–244. [Google Scholar] [CrossRef]
- Merheb, A.; Noura, H.; Bateman, F. Active fault tolerant control of quadrotor UAV using Sliding Mode Control. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 156–166. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Active Fault-Tolerant Control of a Quadcopter against Time-Varying Actuator Faults and Saturations Using Sliding Mode Backstepping Approach. Appl. Sci. 2019, 9, 4010. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Wei, C.; Wu, R.; Cui, N. Adaptive fault-tolerant control for a VTVL reusable launch vehicle. Acta Astronaut. 2019, 159, 362–370. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Muse, J. Nonlinear Adaptive Fault-Tolerant Quadrotor Altitude and Attitude Tracking With Multiple Actuator Faults. IEEE Trans. Control. Syst. Technol. 2018, 26, 701–707. [Google Scholar] [CrossRef]
- Song, Z.; Sun, K. Attitude Tracking Control of A Quad-Rotor with Partial Loss of Rotation Effectiveness. Asian J. Control 2017, 19, 1812–1821. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Shi, D.; Wu, Z.; Chou, W. Super-Twisting Extended State Observer and Sliding Mode Controller for Quadrotor UAV Attitude System in Presence of Wind Gust and Actuator Faults. Electronics 2018, 7, 128. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Hu, Q.; Yang, Y. Continuous finite-time extended state observer based fault tolerant control for attitude stabilization. Aerosp. Sci. Technol. 2019, 84, 204–213. [Google Scholar] [CrossRef]
- Li, B.; Hu, Q.; Yu, Y.; Ma, G. Observer-Based Fault-Tolerant Attitude Control for Rigid Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2572–2582. [Google Scholar] [CrossRef]
- Pérez-Ventura, U.; Fridman, L.; Capello, E.; Punta, E. Fault tolerant control based on continuous twisting algorithms of a 3-DoF helicopter prototype. Control Eng. Pract. 2020, 101, 104486. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C. Fault tolerant control using sliding modes with on-line control allocation. Automatica 2008, 44, 1859–1866. [Google Scholar] [CrossRef] [Green Version]
- Alwi, H.; Edwards, C. A fault tolerant integral sliding mode control allocation scheme for the RECONFIGURE benchmark problem. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 660–665. [Google Scholar] [CrossRef]
- Chandra, K.P.B.; Chen, L.; Alwi, H.; Edwards, C. Actuator faults and blow-down limit detection, and fault tolerant control for the RECONFIGURE benchmark problem. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 1544–1549. [Google Scholar] [CrossRef]
- Chen, L.; Alwi, H.; Edwards, C. Application and evaluation of an LPV integral sliding mode fault tolerant control scheme on the RECONFIGURE benchmark. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 3692–3697. [Google Scholar] [CrossRef]
- Chandra, K.P.B.; Chen, L.; Alwi, H.; Edwards, C. Development and evaluation of sliding mode schemes for the RECONFIGURE benchmark problem. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 805–810. [Google Scholar] [CrossRef]
- Chen, L.; Alwi, H.; Edwards, C.; Sato, M. Evaluation of a Sliding Mode Fault Tolerant Controller on the MuPAL-α Research Aircraft. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 760–765. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Alwi, H.; Edwards, C.; Sato, M. Active Fault Tolerant Control of MuPAL-a Using Sliding Modes. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 6120–6125. [Google Scholar] [CrossRef] [Green Version]
- Vile, L.; Alwi, H.; Edwards, C. Scheduled Fault Tolerant Integral Sliding Mode Control for BWB Aircraft. In Proceedings of the 2020 European Control Conference (ECC), Saint Petersburg, Russia, 12–15 May 2020; pp. 1903–1908. [Google Scholar] [CrossRef]
- Alwi, H.; Chen, L.; Edwards, C. Application of an LPV based Model Reference FTC Scheme on the RECONFIGURE benchmark model. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 5332–5337. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, K.; Yang, T. Spacecraft attitude control using nonsingular finite-time convergence Terminal Sliding Mode. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 618–623. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Niu, X.; Song, X. Adaptive Nonsingular Terminal Sliding Mode Control for Attitude Tracking of Spacecraft With Actuator Faults. IEEE Access 2019, 7, 31485–31493. [Google Scholar] [CrossRef]
- Jiang, B.; Hu, Q.; Friswell, M.I. Fixed-Time Attitude Control for Rigid Spacecraft With Actuator Saturation and Faults. IEEE Trans. Control. Syst. Technol. 2016, 24, 1892–1898. [Google Scholar] [CrossRef]
- Qian, M.; Shi, Y.; Gao, Z.; Zhang, X. Integrated fault tolerant tracking control for rigid spacecraft using fractional order sliding mode technique. J. Frankl. Inst. 2020, 357, 10557–10583. [Google Scholar] [CrossRef]
- Xiao, B.; Hu, Q.; Zhang, Y. Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation. IEEE Trans. Control. Syst. Technol. 2012, 20, 1605–1612. [Google Scholar] [CrossRef]
- Jiang, B.; Hu, Q.; Friswell, M.I. Fixed-time rendezvous control of spacecraft with a tumbling target under loss of actuator effectiveness. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1576–1586. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Zhou, Z.; Qian, M.; Lin, J. Active fault tolerant control scheme for satellite attitude system subject to actuator time-varying faults. IET Control Apilication 2018, 12, 405–412. [Google Scholar] [CrossRef]
- Shen, Q.; Wang, D.; Zhu, S.; Poh, K. Finite-time fault-tolerant attitude stabilization for spacecraft with actuator saturation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2390–2405. [Google Scholar] [CrossRef]
- Golestani, M.; Esmaeilzadeh, S.M.; Xiao, B. Fault-tolerant attitude control for flexible spacecraft subject to input and state constraint. Trans. Inst. Meas. Control 2020, 42, 2660–2674. [Google Scholar] [CrossRef]
- Shahna, M.H.; Abedi, M. An anti-unwinding finite time fault tolerant sliding mode control of a satellite based on accurate estimation of inertia moments. ISA Trans. 2020, 101, 23–41. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Jing, Y.; Liu, X.; Zhang, S. Finite-time attitude-tracking control for rigid spacecraft with actuator failures and saturation constraints. Int. J. Robust Nonlinear Control 2020, 30, 1903–1937. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Finite-time fault-tolerant control for rigid spacecraft with actuator saturations. IET Control Theo. Appl. 2013, 11, 1529–1539. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y.; Fu, M.; Yu, C. Adaptive finite-time attitude stabilization for rigid spacecraft with actuator faults and saturation constraints. Int. J. Robust Nonlinear Control 2016, 26, 28–46. [Google Scholar] [CrossRef]
- Hu, H.; Liu, L.; Wang, Y.; Cheng, Z.; Luo, Q. Active fault-tolerant attitude tracking control with adaptive gain for spacecrafts. Aerosp. Sci. Technol. 2020, 98, 105706. [Google Scholar] [CrossRef]
- Edwards, C.; Shtessel, Y. Adaptive dual-layer super-twisting control and observation. Int. J. Control 2016, 89, 1759–1766. [Google Scholar] [CrossRef] [Green Version]
- Gui, H.; Vukovich, G. Adaptive fault-tolerant spacecraft attitude control using a novel integral terminal sliding mode. Int. J. Robust Nonlinear Control 2017, 27, 3174–3196. [Google Scholar] [CrossRef]
- Xu, Y.; Jiang, B.; Tao, G.; Gao, Z. Fault Accommodation For Near Space Hypersonic Vehicle With Actuator Fault. Int. J. Innov. Comput. Inf. Control. 2011, 7, 2187–2200. [Google Scholar]
- Xu, D.; Jiang, B.; Liu, H.; Shi, P. Decentralized asymptotic fault tolerant control of near space vehicle with high order actuator dynamics. J. Frankl. Inst. 2013, 350, 2519–2534. [Google Scholar] [CrossRef]
- Zhao, J.; Jiang, B.; Peng, P.S.; Liu, H. Adaptive dynamic sliding mode control for near space vehicles under actuator faults. Circuits Syst. Signal Process. 2013, 32, 2281–2296. [Google Scholar] [CrossRef]
- Gao, Z.; Jiang, B.; Shi, P.; Qian, M.; Lin, J. Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique. J. Frankl. Inst. 2012, 349, 1543–1560. [Google Scholar] [CrossRef]
- Dong, Q.; Zong, Q.; Tian, B.; Zhang, C.; Liu, W. Adaptive disturbance observer-based finite-time continuous fault-tolerant control for reentry RLV. Int. J. Robust Nonlinear Control 2017, 27, 4275–4295. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zenteno-Torres, J.; Cieslak, J.; Dávila, J.; Henry, D. Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems. Automation 2021, 2, 1-30. https://doi.org/10.3390/automation2010001
Zenteno-Torres J, Cieslak J, Dávila J, Henry D. Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems. Automation. 2021; 2(1):1-30. https://doi.org/10.3390/automation2010001
Chicago/Turabian StyleZenteno-Torres, Jazmín, Jérôme Cieslak, Jorge Dávila, and David Henry. 2021. "Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems" Automation 2, no. 1: 1-30. https://doi.org/10.3390/automation2010001
APA StyleZenteno-Torres, J., Cieslak, J., Dávila, J., & Henry, D. (2021). Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems. Automation, 2(1), 1-30. https://doi.org/10.3390/automation2010001