Abstract
Automated driving requires the support of critical communication services with strict performance requirements. Existing fifth-generation (5G) schedulers residing at the base stations are not optimized to differentiate between critical and non-critical automated driving applications. Thus, when the traffic load increases, there is a significant decrease in their performance. Our paper introduces SOVANET, a beyond 5G scheduler that considers the Radio Access Network (RAN) load, as well as the requirements of critical, automated driving applications and optimizes the allocation of resources to them compared to non-critical services. The proposed scheduler is evaluated through extensive simulations and compared to the typical Proportional Fair scheduler. Results show that SOVANET’s performance for critical services presents clear benefits.
1. Introduction
Autonomous driving technologies will pave the way for future mobility as automotive and telecommunication tech leaders are researching technologies to address society’s connected mobility needs. The main objective is to provide inclusive access to more innovative, safer, and environmentally sustainable services and solutions. The International Society of Automotive Engineers (SAE) provides a taxonomy with detailed definitions for six levels of driving automation, ranging from no-driving automation (Level 0) to full driving automation (Level 5) [1].
Cellular Vehicle-to-Everything (C-V2X) [2] appears as the most promising communication solution to enable autonomous driving. C-V2X is a unified connectivity platform that refers to networks combining the following types of communications:
- (a)
- Device-to-device mode communication (D2D): including Vehicle-to-Vehicle (V2V), Vehicle-to-Pedestrian (V2P), and Vehicle-to-Infrastructure (V2I). The latter refers to communication among infrastructure components supporting highway systems (e.g., RFID readers, cameras, traffic lights, etc.). D2D does not require a cellular network infrastructure or even a SIM (Subscribed Identity Module) card. For synchronization purposes, GNSS (Global Navigation Satellite System) is used.
- (b)
- Vehicle-to-Network (V2N) communications: This mode of communication uses the typical cellular wireless links to establish communication among vehicles, service providers, RAN, Core and (far) edge/cloud infrastructure, etc.
Based on their nature (fully distributed vs. centralized communication) and characteristics (type of antennas, transmission power, coverage, etc.), D2D and V2N communications have in principle different strategies for scheduling the exchange of data packets. In this paper, V2N communication is in focus.
C-V2X encapsulates all Third Generation Partnership Project (3GPP) V2X technologies, and it has been introduced in various standards [3]. The 3GPP Technical Report [4] identifies Use Cases (UCs) and potential service requirements to enhance 3GPP’s support for V2X services. 5G Automotive Association (5GAA) in [5] has defined a methodology to describe solution-agnostic automotive UCs and application requirements referred to as Service Level Requirements (SLR). This 5GAA white paper applies the defined methodology to describe advanced UCs, which require complex interactions among vehicles, as well as between vehicles and communication infrastructure, in relation to self-driving (autonomous) vehicles. Another 5GAA white paper [6] provides a roadmap for advanced driving UCs, connectivity technologies, and radio spectrum needs. The document describes both advanced and critical driving UCs, as well as the support of non-critical Basic Safety Messaging (BSM) types of communication.
The work in [7], compares and maps key requirements for advanced autonomous driving UCs, as provided by 3GPP and 5GAA. The paper provides an analytical delay and capacity performance analysis for these UCs, considering both the Fourth Generation Long Term Evolution (LTE) and the 5G cellular networks’ performance characteristics and provided features. As the paper suggests, although V2X communication is usually treated under the Ultra-Reliable Low Latency Communication (URLLC) cases, the presented analysis suggests that the uptake of V2X communication by many vehicles in an area creates considerable challenges in terms of capacity. These challenges, if not addressed, may lead to throughput reduction, packet latency increase and Packet Reception Rate (PRR) degradation, well below the required performance.
Similar findings have been presented in [8], where the conclusions of a thorough analysis indicate that mobile operators would require at least 500 MHz of additional service-agnostic mid-band (1 to 7 GHz) spectrum to support advanced automotive V2N services. By the term “additional”, 5GAA refers to bands not currently identified among the ones for International Mobile Telecommunications (IMT) use by cellular communication networks. From the above, it can be inferred that supporting multiple vehicles, each engaged in several autonomous driving services of diverse needs, will be a challenging task for forthcoming cellular networks.
Not all autonomous driving services have strict requirements. Some may only require sparse, non-real-time updates from the infrastructure side to the vehicles, leading to easily addressable data rate and latency needs. These, however, will be multiplexed with services that will require high throughput, ultra-high reliability and minimum delays. Such services include Teleoperated Driving (ToD) and High-Definition Map Sharing (HDM). ToD is a service with stringent requirements [6] in terms of significantly low radio communication latency and increased system capacity (specifically on the uplink-UL). A more detailed description can be found in existing technical reports [5] that study system requirements and respective enabling technologies for ToD services using C-V2X networks.
Regarding the HDM UC, vehicles share their sensor data with a High Definition (HD) map provider service, which builds and shares HD maps with other vehicles. The objective is to create precise and accurate, near real-time object positioning, which is dynamically updated in near real-time. Dynamic and accurate HD maps are essential building blocks for safe automated driving. The above-mentioned UCs are planned to be supported soon [6] and are used in this paper to investigate the technology readiness in supporting such critical applications, and therefore, the feasibility of actual deployment.
The 5G New Radio (NR) access technology provides a flexible, scalable, and forward-compatible Physical (PHY) layer to support a wide range of center carrier frequencies, deployment options, and a variety of UCs. In relation to the allocation of radio resources, the selection of the scheduling algorithm greatly affects network performance, in terms of throughput, delay and PRR. As we present in the paper, the typical 5G scheduling schemes often cannot adequately support the strict requirements and fine differentiations in the quality of service (QoS) requirements of the V2X services, particularly when required to scale up in relation to the number of the vehicles in a dynamic and responsive-or even predictive-manner. Although scheduling is a well-researched topic, dedicated solutions, especially V2N communication, are still in their infancy. As discussed in our paper, existing solutions do not consider the diversity of autonomous driving services with different data traffic characteristics and requirements. Thus, there are serious performance issues, especially on the UL when the network handles considerable user data traffic load.
As it is presented in Section 2, well-established schedulers have been mainly developed to support enhanced Mobile Broadband (eMBB) communications. Moreover, solutions offered in the research literature do not always focus on V2N communications, several of these do not consider differential treatment for each UE session, or they use data traffic patterns and even deployment not specified by key standardization bodies like 3GPP or experts in this area as 5GAA.
The purpose of the proposed scheme, called SOVANET (Scheduler Optimized for VANET), is to address this gap by providing a novel scheduler that considers well-defined autonomous driving services and provides a per-service solution to guarantee that critical services’ resource demands are met and not overwhelmed by non-critical V2X services. Extensive simulations using the Network Simulator 3 (ns-3) [9] prove the efficiency of our proposed solution.
More specifically, SOVANET is a novel scheduling mechanism that assesses the QoS requirements of each traffic flow for each vehicle (i.e., User Equipment-UE), using well-defined data traffic characteristics and allocates the available resources proportionally so that demanding services that are related to the safety of the passengers and vehicles will be prioritized in terms of allocated resources, and at the expense of non-safety demanding services. The main contributions of our work are as follows:
- The implementation of the aforementioned scheduler.
- The implementation of the scheduler using the ns-3 and the SUMO [10] environment calibrating the simulator based on 3GPP’s and 5GAA data
- The performance comparison of the proposed scheduler against the Proportional Fair (PF) scheduler.
As we will present, SOVANET considers the network load and handles critical and non-critical services for each UE separately by over-provisioning and under-provision resources accordingly. The results indicate that compared to the baseline scheduler, SOVANET provides promising results, especially on the UL or under highly loaded situations.
The rest of the paper is organized as follows. Section 2 describes widely accepted 5G NR scheduling schemes, as well as research proposals suggested for V2X communication. Section 3 presents our proposed scheduling algorithm. Section 4 presents the simulation environment used, while Section 5 presents the performance evaluation of SOVANET against the PF scheduler. Section 6 provides information about the future directions of our work and concludes the paper.
2. Scheduling Algorithms
Scheduling of radio resources is a critical process for cellular communications, as it directly affects services’ QoS. In the literature, there are well-known algorithms for wireless communications that are widely accepted. Improving the QoS for 5G communication sessions by maximizing the throughput, minimizing the delay and jitter, as well as optimizing the allocated resources have been the key issues for several research efforts. In the following subsections, we present the well-established 5G scheduling algorithms and scheduling algorithms proposed for V2X communications, and we discuss what is still needed especially for V2N communications.
2.1. Well-Established 5G Scheduling Algorithms
Some of the well-known types of schedulers considered for wireless communications, including 5G networks, are the following:
- Round-Robin (RR) scheduler: the scheduler distributes the available Resource Block Groups (RBGs) evenly among UEs in a cell.
- Proportional Fair (PF) scheduler: the scheduler tries to maximize the total throughput of the network while at the same time attempting to provide all users with at least a minimal level of service. To achieve this, the scheduling priority is inverse to the UE and proportional to the anticipated resource consumption for a UE. Our paper considers the ns-3 PF scheduler, where a UE is scheduled when its instantaneous channel quality is high relative to its own average channel condition.
- Maximum Rate (MR) scheduler: the scheduler aims to maximize the overall throughput for a base station. To achieve this, it allocates resource blocks to the user that can achieve the maximum achievable rate in the current Time Transmission Interval (TTI).
Each of the above scheduling techniques comes with its strengths and shortcomings. In our paper, we use PF scheduling as the baseline scheme for comparison as it targets to provide at least a minimal level of service for all UEs. However, PF like the other scheduling schemes, shares the same principle: scheduling takes place at a granularity of each UE, meaning that the resource allocation is applied per UE and not per service. This, of course, is not suitable as different V2X services (even those related to the same family, e.g., safety) have other requirements. When scheduling takes place on the UE level, this may violate the desired requirements (e.g., throughput, delay or reliability), especially when the load of the access network increases. One of the novelties of the proposed solution (SOVANET) is to allocate resources on a traffic flow/service type basis, rather than a UE one, to cope with the fast-changing environment and diverse V2X UCs requirements.
2.2. Proposed Schedulers for 5G and Beyond including V2X Communications
Scheduling for future 5G and beyond systems is a well-investigated topic. An overview of the state-of-the-art methods for the various scheduling schemes can be found in [11]. The indicated survey paper reviews the development of scheduling algorithms through the literature and classifies them into four primary categories, based on (i) the various QoS metrics used, (ii) the machine-learning approach adopted, (iii) the performance goals, and (iv) the suitability to achieve 5G performance requirements for different UCs requirements. The paper analyzes the suitability of each scheduling algorithm for different 5G families of UCs eMBB, Ultra Reliable Low Latency Communications-URLLC, and massive Machine Type Communications-mMTC). Notably, all scheduling mechanisms analyzed in this paper for URLLC (related to V2X communications for safety) are QoS unaware except for two of them. The authors of [12] have designed such an algorithm, but it is targeted at LTE networks and requires many parameters that may increase the computation time. Thus, it is challenging to implement. Similarly, the solution in [13] demonstrates high computation times and requires constant training, which is resource-consuming. The paper’s authors provide an analytical model and simulations for a limited number of users (i.e., 10) using generic traffic patterns (i.e., CBR and VBR).
In [14], a network slice-aware RAN radio resource allocation mechanism for the dynamic multiplexing of enhanced mobile broadband (eMBB) and URLLC users is proposed. The proposed scheme allocates RBs based on the signal-to-noise ratio (SNR) multiplied by a normalized queue state parameter, targeting to avoid buffer data accumulation. However, the analysis is performed from a slice-level granularity, missing to consider specific UE traffic flows.
The authors of [15] note the lack of research efforts that address resource allocation under different requirements from multiple V2X applications. The authors in [15] present another resource allocation algorithm for 5G-V2X communications that selects the appropriate 5G numerology based on the V2X application requirements and the channel conditions. V2X applications are categorized as safety and non-safety-related applications. Resources are allocated prioritizing the safety applications first. The performance of the scheme is analyzed through simulations and provides interesting results. However, these results come from considering 50 vehicles running a V2V (and not V2N) safety application, which is essentially the exchange of Cooperative Awareness Messages (CAMs). Among them, a subset of 20 vehicles run one type of non-safety application, namely a videoconference stream. Although the strategy of promoting safety against non-safety applications during the allocation of resources shares similar principles to SOVANET, the use of non-realistic data traffic patterns for autonomous driving applications needs to be considered to objectively evaluate the provided results.
In [16], a new scheduling algorithm is introduced, based on a Block Resource Allocation policy in a Non-Orthogonal Multiple Access (NOMA) way, so that a well-defined set of users is selected to use the same RB. To identify such sets, the scheme considers metrics related to the distance and the equity between users. The objective is to maximize the system throughput equity among the number of served users and to minimize the packet error rates.
A multi-user scheduling algorithm is proposed in [17] for ultra-massive MIMO systems in 6G V2X scenarios. The problem tackled is to provide stable and reliable wireless link quality and improve the channel gain in vehicles moving at high speeds. The authors suggest using a multi-user scheduling algorithm based on block diagonalization precoding. This paper focuses mainly on bit error rate performance and spectrum efficiency and does not distinguish between different V2X services.
In [18], the authors suggest using vehicles’ density information, channel state information, and queuing state information to allocate resources. The scheme’s target is to reduce latency, improve throughput and guarantee reliability for V2V and V2N UEs. The evaluation of the results considers the key performance indicators at the UE level, not the service level.
In [19], the authors evaluate the use of different 5G QoS schemes to identify how V2N scheduling for automated driving communication sessions is affected when other types of traffic, i.e., VoIP, video, and web traffic, are present concurrently. The authors consider just a single data traffic pattern for any automated driving session, which is somewhat limited in order to gain full insight into the support of various applications. They discover that the use of standardized values does not seem to be sufficient to guarantee an adequate performance for all four (VoIP, video, web and automated driving) applications, and thus, they suggest a combination of the different variants. As they also notice, the bigger the packet size of a session, the worse becomes the performance of the corresponding application.
V2N scheduling is also investigated in [20], where the authors are using a maximum carrier to interference scheduler to provide priorities to V2X messages by indicating a higher priority in QoS, compared to VoIP, Video and Data traffic. As in the previous scheme, V2X sessions consider having only one type of data traffic pattern, thus providing useful yet limited insight into the effect of various types of V2X services.
The above-mentioned papers present several interesting findings for developing scheduling algorithms for V2X communication and provide positive perspectives. However, not all of them focus on V2N communications. Those that offer solutions to this scheduling category evaluate their proposals either at a UE level thus, not providing service differentiation for each autonomous driving service separately, or their analysis considers only one type of V2X services which they compare with typical VoIP, Video and data traffic. However, as 5G networks support the notion of slicing [21], such non-critical services can always be supported via an eMBB slice and separately from V2X services. However, it is important to manage and support service differentiation among automated driving applications, especially those related to different safety services, as these services may have different data traffic characteristics and requirements.
Our proposed solution addresses this point and overcomes the shortcomings of serving the latest 5G C-V2X UCs with stringent requirements, under traffic congestion conditions. As stated in [6], developing 5G-enabled vehicles under V2X UCs is ongoing. C-V2X connectivity presents advantages providing both direct and Non-Line-Of-Sight (NLOS) communication, higher achievable throughput, and enhanced reliability. These advantages introduce an additional motive to develop a scheduler, dedicated to C-V2X communications, which optimizes resource allocation on a V2X service-basis. All autonomous or automated driving applications that require communication through a server or between vehicles that do not have an NLOS, must be served by a base station. Thus, the development of an appropriate V2N scheduler for this category is essential. This is precisely the focus of our paper.
3. The Key Features of the SOVANET Algorithm
Network-related requirements for advanced driving UCs can be found in 5GAA’s report [8]. This report analyzes the spectrum needs of UCs for intelligent transport systems (ITS) and advanced driving, as implemented by C-V2X technologies. A list of over 40 UCs is categorized as either “initial/day-1” or “advanced”. According to 5GAA, LTE-V2X and NR-V2X are the most suitable technologies for the support of day-1 ITS and advanced driving UCs, respectively. However, when investigating advanced autonomous driving services, the requirements become much more challenging even for 5G networks.
For the design of SOVANET and its performance analysis we have chosen two demanding autonomous driving services, namely:
- Teleoperated Driving (ToD): a service that assists, complements, and accelerates semi- and fully automated driving in various scenarios. It is considered a V2N service, as the server for this application will be located at the northbound interface, the edge or even the core network of an operator. This service is delay sensitive with significant throughput requirements on the UL.
- High-Definition Mapping and Sharing (HDM): a service where vehicles equipped with LIDAR or other HD sensors collect and share environment information with a high-definition map provider, which then builds high-definition maps and shares them with vehicles. This service is expected to support the development of higher automated driving levels in the future. It is another V2N delay-sensitive service with significant throughput requirements on both the UL and the downlink (DL).
These two services are critical as a non-optimum performance would significantly impact the perceived QoS and more importantly road safety. For our analysis, these services have been combined with a generic day 1 non-critical service relying on BSM, which are continuous messages that are typically repetitive and tend to support all types of broadcast communications.
The key characteristics for all the above-mentioned UCs can be found in Table 1. For ToD, we have assumed in the UL 2 video streams of 8 Mbps each, while for the case of DL, 400 kbps. Similarly, we considered only sensor-oriented data for the HDM service, which requires 4 Mbps on the UL, and 16 Mbps on the DL. Lastly, for the BSM service, both the communication streams on the UL and DL are modeled as 8 kbps-bitrate flows. All values are taken by [8], where additional information can also be found. This document categorizes ToD and HDM services as delay-sensitive and BSM as non-delay-sensitive.

Table 1.
UCs requirements.
Moreover, in [4] an end-to-end delay of 5 ms for ToD and 10 ms for HDM is identified. BSM end-to-end delay of 100 ms is typical for non-critical applications. In our analysis, the critical ToD UL and HDM DL were implemented using large packet sizes of 10 kbytes and a packet transmission interval of 5 ms.
As mentioned before, targeting to address the demanding requirements of Table 1, we propose a novel scheduler called SOVANET. In the following paragraphs, we present the scheduler implementation and analyze its performance in four data traffic scenarios of 10, 25, 40, and 60 vehicles. As the number of vehicles increases, the number of vehicles using critical ToD and HDM UCs is linearly increasing reaching a point where these services are becoming unsupportable. The main idea behind the implementation of our scheduler is to take into account the highly varying overall network load, created by V2N services, and allocate the available resources prioritizing critical services such as ToD and HDM and, respectively, deprioritizing the allocation of resources to non-critical UCs like BSM. Therefore, develop a scheduling mechanism that considers the network load and the services’ requirements. To achieve this, we introduce the following two steps in our implementation. The first is to separate the UCs into critical and non-critical, and the second is to maximize the performance of critical UCs and at the same time provide a minimal amount of resources for the rest.
To evaluate the performance of SOVANET, the PF scheduler is used as the baseline. The PF scheduler is a throughput-fairness compromise-based scheduling algorithm trying to balance two competing interests. The scheduler aims at maximizing throughput for those UEs with the highest channel quality indicator (CQI) value and at the same time allowing all remaining UEs a minimal level of service. In our simulation scenarios, we have used the PF implementation of ns3::NrMacSchedulerNs3 class [22].
The ns3 PF implementation has been extended with steps 5 and 6 (Figure 1) to create the SOVANET scheduler. According to the overall SOVANET scheme a list of active UEs, along with their respective requirements, are initially used to update the UEs map, assigned to specific Logical Channels (LCs) and Logical Groups (LGs). What follows is an update of the Buffer Status Report (BSR) and UL and DL CQI calculations. In our implementation, the novelty introduced is related to the service-specific allocation of resources and the differentiation between the UL and DL resource allocation.
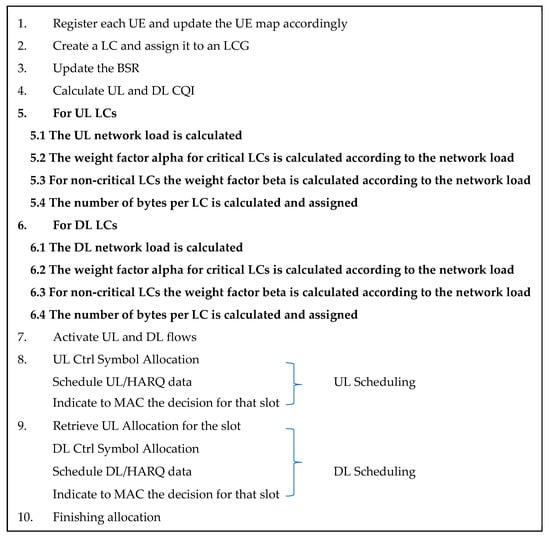
Figure 1.
SOVANET scheduling algorithm.
A weight factor, denoted as “alpha” is introduced, which is defined concerning the network load and is used to provide more resources per service, compared to what is requested, for critical services (e.g., ToD, HDM). Similarly, a weight factor “beta”, related to the overall network load is used to allocate fewer resources in the case of non-critical BSM services. When both factors are set, the number of bytes per LC is calculated and assigned. Steps 7–10 of the implementation follow the PF scheduler design [23].
The number of bytes per LC for the critical services is calculated using the throughput formulae:
where: xi is the user’s throughput, alpha is the weight factor, load is the network load, TBS is the Traffic Block Size and activeLC is the active Logical Channel used.
The weight factor alpha is expressed as a percentage of the network load and its adaptation according to the network load in the UL and DL sessions can be found in Figure 2. The values selected for this factor have been the result of extensive simulations. For instance, in the UL for an overall network load of 200 Mbps the alpha factor is 5% and in the DL for the same load, the alpha is 0.5%. For the case of a modest network load of 50 Mbps the alpha factor is set at 15% for the UL and 1.5% for the DL. The relation between the alpha factor and the network load can be approximated and expressed as an exponential equation: for the UL and for the DL.
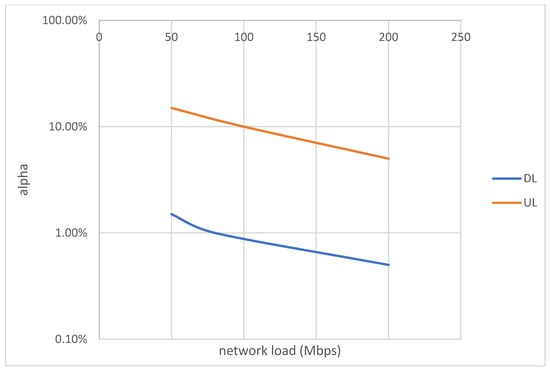
Figure 2.
Critical services weight factor (alpha) adaptation.
It can be observed that the alpha factor is reduced as the network load increases; the maximum allocated resources should not exceed the available resources.
The beta weight factor is calculated and appointed to all non-critical BSM services in all load scenarios, as the 0.5% of the overall network load, as the requirements for the UL and DL of the BSM UC are particularly low (in the order of 8 kbps).
4. Simulation Environment
The considered urban simulation environment follows a network model, composed by one 5G NR macro cell (gNB) placed in the center of an urban intersection, following the characteristics of an urban grid for connected vehicles [24]. Parameters regarding the urban intersection are summarized in Table 2. Through this model, several scenarios have been explored, as explained in detail in the next section. The following paragraphs elaborate on the parameters used in all simulation scenarios and briefly present the mobility models used.
Table 2.
Road parameters for urban intersection.
The above-described topology was implemented with SUMO (Simulation of Urban MObility), an open-source, highly portable, multi-modal traffic simulation package designed for vehicular networks. The vehicle flows are also modeled using SUMO and their characteristics can be found in Table 3.
Table 3.
Vehicles-traffic characteristics.
In our simulations, the latest ns-3 release has been used (i.e., v3.37), along with the NR module Version 2.3. Ns-3 is a discrete-event network simulator, providing an open simulation environment for networking research, aligned with the simulation needs of modern networks. The NR module is a pluggable module for ns-3 that can be used to simulate 5G NR cellular networks. The network parameters in the scenarios simulated are based on [24] and are summarized in Table 4.
Table 4.
Network simulation parameters.
In the initial ns-3 implementations, the PF scheduler was used in the OFDMA mode and the above-mentioned parameters. Four different cases of vehicle density were considered with 10, 25, 40 and 60 vehicles, respectively. As the number of vehicles increased the number of vehicles requiring ToD and HDM UCs was also increased, trying to represent different traffic conditions in the urban intersection. Then, the simulation was repeated with the use of the implemented SOVANET scheduler.
5. Performance Evaluation
In this section, we present the performance of the novel SOVANET scheduler against the OFDMA PF implementation of ns-3. The metrics used in assessing the proposed scheme’s performance are mean throughput and mean delay, with the requirement goals summarized in Table 1.
In Figure 3 the results regarding the mean values of throughput and delay for ToD UL are illustrated. The throughput gain for SOVANET vs. the PF scheduler for the 60 vehicles case reaches up to 21.8%, whereas for the 40 vehicles, it is 20%, and for the 25 vehicles case it is 4.4%. A massive increase in the delay of 1181% is observed for the PF scheduler in the 60 vehicles case, whereas it is 228% for the 40 vehicles, and 42% for the 25 vehicles have been recorded making a delay critical UC like ToD unfeasible when the PF scheduler is used. The above-mentioned performance gains are the result of assigning more resources for the critical cases and reducing the allocated resources for the non-critical cases. This way the vehicle is able to re-transmit lost packets without serious degradation in both the throughput and the experienced delay.
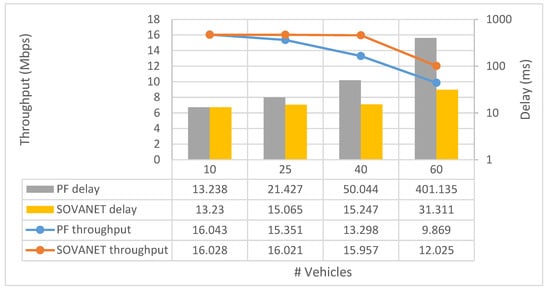
Figure 3.
ToD UL mean throughput and delay.
At this point, it should be noted that the measured delay is considered end-to-end, taking into account an additional 12 ms user plane delay for packets going through the core network and up to a V2X server [7].
Evaluating the results regarding the ToD DL in Figure 4, both schedulers in the first three scenarios examined exhibit almost the same performance regarding the mean throughput and delay values. In the 60 vehicles case, the SOVANET scheduler demonstrates a 30.8% throughput gain and an 11.645% lower delay value. Once again, the overprovisioning of resources in the case of SOVANET leads to better performance, even in the case of DL when the network faces a significant load.
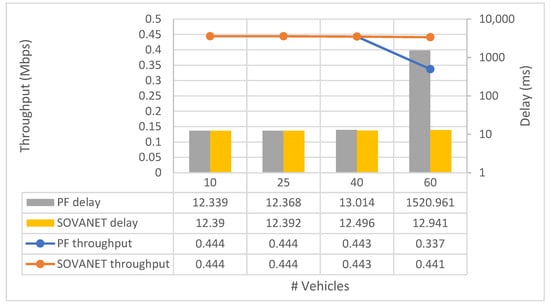
Figure 4.
ToD DL mean throughput and delay.
Analyzing the performance of the HDM UL service, Figure 5 presents how SOVANET outperforms the PF scheduler. In the case of 60 vehicles, the throughput increases by 15.1%, whereas for 40 vehicles by 14.3%, and for 25 vehicles by 11.9% using the SOVANET scheduler. The mean delay in the case of the PF scheduler is 164.2% higher compared to SOVANET in the 60 vehicles case, 229% in the 40 vehicles case, 199.3% in the 25 vehicles case and 148.5% in the 10 vehicles case. Similarly, the UC of ToD using the SOVANET scheduler in all four scenarios, resulted in an overall higher efficiency of the proposed scheme against the PF scheduler because of the balanced allocation of resources for this critical service; the overprovisioning of resources ensures low delay including the cases for fast retransmission of data when this is needed.
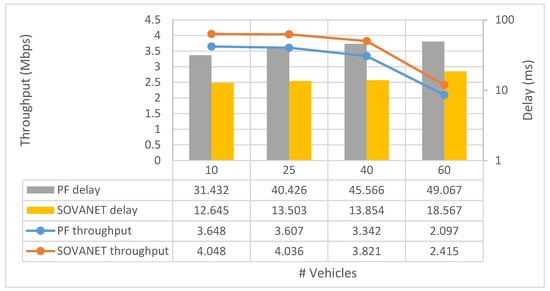
Figure 5.
HDM UL mean throughput and delay.
In the results presented in Figure 6 regarding the HDM DL, both schedulers’ performance is similar for the first three cases. In the fourth and most demanding scenario, a considerable degradation of 63.2% in the throughput and a 1191% delay increase for the PF scheduler were recorded. Still, although SOVANET outperforms the PF scheduler, in the case of 60 vehicles, the SOVANET also illustrates a severe performance degradation in terms of delay.
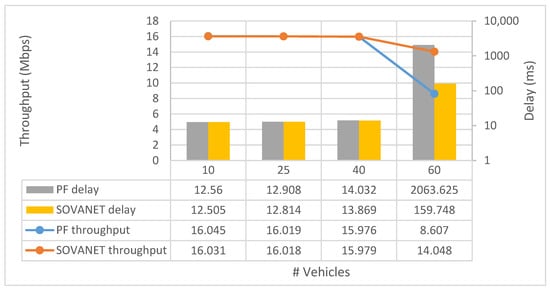
Figure 6.
HDM DL mean throughput and delay.
The analysis of the simulation results is completed with Figure 7 and Figure 8, which present the throughput and delay performance of vehicles using the BSM UC. Regarding the UL, the performance of both schedulers was the same except for the case of 60 vehicles where PF shows a 10% throughput gain. The throughput in the DL of all cases was the same for both schedulers and in the case of 60 vehicles an increase in delay of 913% for the PF was computed.
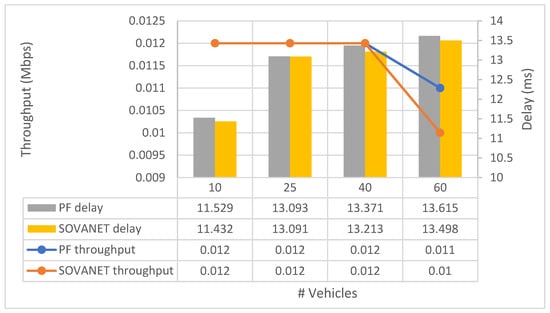
Figure 7.
BSM UL mean throughput and delay.
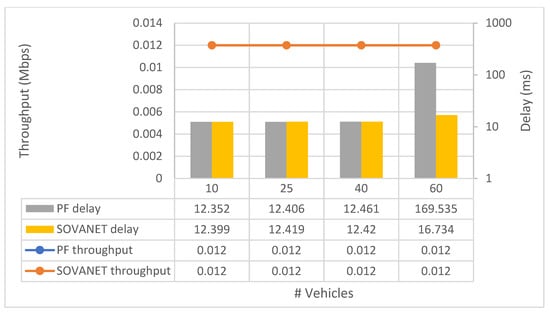
Figure 8.
BSM DL mean throughput and delay.
It should be noted that BSM is a non-critical case in terms of delay and low resource requirements; as a result, no remarkable allocation decision differences are applied by the two schemes and thus the performance for both schedulers is similar. However, a broad degradation in the performance of the PF scheduler in the DL state is observed in the case of 60 vehicles, which affects all the studied UCs.
A common observation in all four scenarios is that the SOVANET scheduler outperforms the PF scheduler both in terms of throughput and delay. This is especially true for the UL case where SOVANET is more balanced considering the overall load for the UL and the DL. Obviously, overprovisioning for the critical services of each vehicle while under-provisioning for the non-critical services provides for the needed prioritization of services and results in much better performance.
However, it is worth noting that in heavy load scenarios, there is still a performance degradation for both UL ToD and HDM UCs compared to their minimum requirements, making them difficult to support. This is true even for SOVANET, and although it outperforms the PF scheduler, it does not meet the strict requirements. For such cases, services developers may consider allowing for some adaptability of their applications as a remedy to under-performance in network loaded conditions.
6. Conclusions
In this paper we have presented a new scheduler, SOVANET, to address V2N communication for critical automated driving services of high SAE automation driving level. The difference between SOVANET compared to other proposed schemes for autonomous driving is twofold:
- SOVANET takes into consideration real-time information about the load on both the UL and DL and balances the resources so that the performance on the uplink and the downlink are equally balanced
- SOVANET considers each session’s needs and over-provides resources for the critical services while reducing corresponding resources for non-critical services.
As we have presented, through extensive simulation results, SOVANET outperforms the compared baseline PF scheduler. It is worth noting that SOVANET offers more significant gains in the UL case. Considerable gains are also present on the DL when the network is overloaded with many vehicles and their services.
In very congested scenarios, meeting the strict requirements of critical services is still difficult. Thus, further cross-layer solutions that will allow some adaptability of the V2N applications need to be developed. As future steps, we plan to evolve SOVANET further to identify a more adaptive calculation of the alpha and beta weighting factors using different simulation environments and a wider plethora of critical and non-critical applications. This will further improve the evaluation of the related KPIs (e.g., throughput, delay, etc.) in more realistic scenarios. Finally, as future networks are expected to operate in a dense radio access network environment, we are planning to extend the SOVANET algorithm to support smooth handovers.
Author Contributions
Conceptualization, A.K. (Alexandros Kaloxylos); methodology, A.K. (Athanasios Kanavos); software, A.K. (Athanasios Kanavos); validation, A.K. (Alexandros Kaloxylos) and S.B.; formal analysis, A.K. (Athanasios Kanavos) and S.B.; investigation, A.K. (Athanasios Kanavos); data curation, A.K. (Athanasios Kanavos); writing—original draft preparation, A.K. (Athanasios Kanavos); writing—review and editing, A.K. (Alexandros Kaloxylos) and S.B.; visualization, A.K. (Alexandros Kaloxylos); supervision, A.K. (Alexandros Kaloxylos); project administration, A.K. (Alexandros Kaloxylos). All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data used for supporting the reported results can be found upon request to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- SAE Document J3016_202104. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 30 April 2021).
- 5GAA. C-V2X Explained. Available online: https://5gaa.org/c-v2x-explained/ (accessed on 10 April 2023).
- Khan, M.J.; Khan, M.A.; Malik, S.; Kulkarni, P.; Alkaabi, N.; Ullah, O.; El-Sayed, H.; Ahmed, A.; Turaev, S. Advancing C-V2X for Level 5 Autonomous Driving from the Perspective of 3GPP Standards. Sensors 2023, 23, 2261. [Google Scholar] [CrossRef] [PubMed]
- TR 22.886 V16.2.0; Technical Report 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services (Release 16). 3GPP: Biot, France, 2018.
- 5GAA. C-V2X Use Cases Volume II: Examples and Service Level Requirements. In 5GAA Automotive Association White Paper; 5GAA: Munich, Germany, 2020. [Google Scholar]
- 5GAA. A visionary roadmap for advanced driving use cases, connectivity technologies, and radio spectrum needs. In 5GAA Automotive Association White Paper; 5GAA: Munich, Germany, 2022. [Google Scholar]
- Kanavos, A.; Fragkos, D.; Kaloxylos, A. V2X communication over cellular networks: Capabilities and Challenges. Telecom 2021, 2, 1–26. [Google Scholar] [CrossRef]
- TR S-200137; Working Group Standards and Spectrum Study of Spectrum Needs for Safety Related Intelligent Transportation Systems—Day 1 and Advanced Use Cases. 5GAA: Munich, Germany, 2020.
- Baumgartner, M.; Juhar, J. Simulation of 5G and LTE-A access technologies via network simulator NS-3. In Proceedings of the IEEE 44th International Conference on Telecommunications and Signal Processing (TSP), Brno, Czech Republic, 26–28 July 2021. [Google Scholar]
- Lim, K.G.; Lee, C.H.; Chin, R.K.Y.; Yeo, K.B.; Teo, K.T.K. SUMO enhancement for vehicular ad-hoc network (VANET) simulation. In Proceedings of the IEEE 2nd International Conference on Automatic Contril and Intelligent Systems (I2ACIS), Kota Kinabalu, Malaysia, 21 October 2017. [Google Scholar]
- Mamane, A.; Fattah, M.; El Ghazi, M.; El Bekkali, M.; Balboul, Y.; Mazer, S. Scheduling Algorithms for 5G Networks and Beyond: Classification and Survey. IEEE Access 2022, 10, 51643–51661. [Google Scholar] [CrossRef]
- Nguyen, D.-H.; Nguyen, H.; Renault, E. E-MQS—A new downlink scheduler for real-time flows in LTE network. In Proceedings of the IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar]
- Comşa, I.-S.; Zhang, S.; Aydin, M.E.; Kuonen, P.; Lu, Y.; Trestian, R.; Ghinea, G. Towards 5G: A reinforcement learning-based scheduling solution for data traffic management. IEEE Trans. Netw. Serv. Manag. 2018, 15, 1661–1675. [Google Scholar] [CrossRef]
- Korrai, P.; Lagunas, E.; Sharma, S.K.; Chatzinotas, S.; Bandi, A.; Ottersten, B. A RAN Resource Slicing Mechanism for Multiplexing of eMBB and URLLC Services in OFDMA Based 5G Wireless Networks. IEEE Access 2020, 8, 45674–45688. [Google Scholar] [CrossRef]
- Khabaz, S.; Boulila, K.O.; Nguyen, T.M.T.; El Aoun, M.; Velloso, B.P. A New Priority and Satisfaction-based Resource Allocation Algorithm with Mixed Numerology for 5G-V2X communications. In Proceedings of the 2022 14th IFIP Wireless and Mobile Networking Conference (WMNC), Sousse, Tunisia, 17–19 October 2022. [Google Scholar] [CrossRef]
- Bouhamed, E.; Marouane, H.; Trabelsi, A.; Zerai, F. Scheduling Algorithm supporting V2X Communications based on NOMA access. IFAC-PapersOnLine 2020, 53, 14948–14953. [Google Scholar] [CrossRef]
- He, S.; Du, J.; Liao, Y. Multi-User Scheduling for 6G V2X Ultra-Massive MIMO System. Sensors 2021, 21, 6742. [Google Scholar] [CrossRef] [PubMed]
- Abbas, F.; Liu, G.; Fan, P.; Khan, Z.; Bute, M.S. A vehicle density based two-stage resource management scheme for 5G-V2X Networks. In Proceedings of the 91st IEEE Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Deinlein, T.; Roshdi, M.; Nan, T.; Heyn, T.; Djanatliev, A.; German, R. On the impact of priority-based MAC layer scheduling in 5G V2N multi-application scenarios. In Proceedings of the 13th IFIP Wireless and Mobile Networking Conference (WMNC), Montreal, QC, Canada, 20–22 October 2021. [Google Scholar] [CrossRef]
- Mustaffa, M.A.B.; Abidin, H.B.Z.; Mazalan, L.B.; Zaman, F.H.K.; Mun, N.K.; Abdullah, S.A.B.C. Performance analysis of heterogeneous data transmission in 5G C-V2N communication. In Proceedings of the 10th IEEE Conference on Systems, Process & Control, Melaka, Malaysia, 17 December 2022. [Google Scholar] [CrossRef]
- Kaloxylos, A. A survey and an analysis of network slicing in 5G networks. IEEE Commun. Stand. Mag. 2018, 2, 60–65. [Google Scholar] [CrossRef]
- ns3::NrMacSchedulerNs3 Class|5G-LENA Official Doxygen Documentation. Available online: https://cttc-lena.gitlab.io/nr/html/classns3_1_1_nr_mac_scheduler_ns3.html (accessed on 29 March 2023).
- Patriciello, N.; Lagen, S.; Giupponi, L.; Bojovic, B. An Improved MAC Layer for the 5G NR NS-3 module. In Proceedings of the 2019 Workshop on NS-3, Florence, Italy, 19 June 2019; pp. 41–48. [Google Scholar] [CrossRef]
- TR 38.913 V17.0.0; Technical Report 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Study on Scenarios and Requirements for Next Generation Access Technologies; (Release 17). 3GPP: Biot, France, 2022.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).