
Chaotic Jaya Approaches to Solving Electromagnetic Optimization Benchmark Problems

 ,
,  ,
,  ,
,  ,
, 

Abstract
:1. Introduction
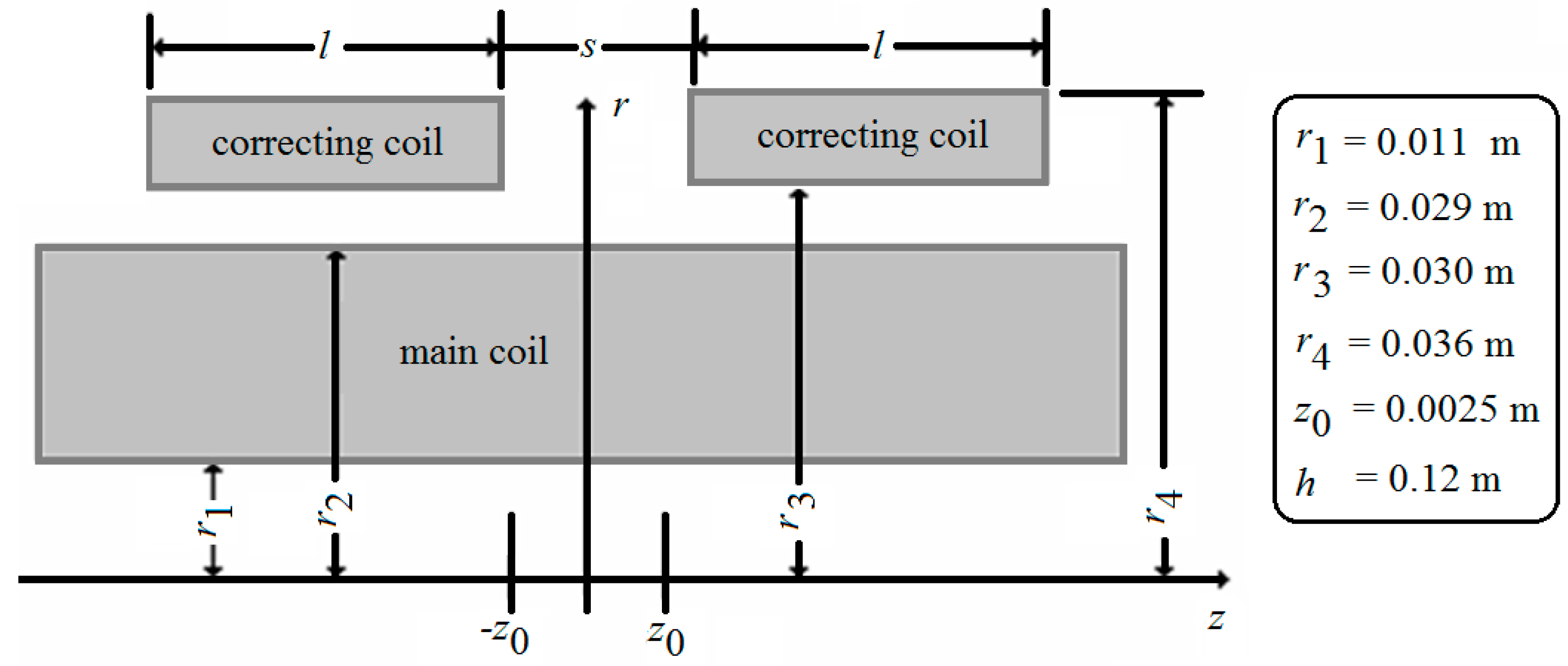
2. Loney’s Solenoid Design
3. Brushless DC Motor Benchmark
4. Description of the Jaya Algorithm
4.1. The Standard (Classical) Jaya Algortihm
- Initially, choose the parameters of the population size, the upper and lower limits of the design variables, and the maximum number of generations or iterations G (stopping criterion);
- Randomly generate m initial candidate solutions (population) with the upper and lower bounds of the variables using uniform distribution in the search domain. Evaluate the initial candidate solutions with the objective function. Set the iteration (generation) k to zero;
- Obtain the best and the worst candidate solutions in the current population;
- For each solution vector x, create a child solution given by Equation (4), and validate it by calculating the objective function value;
- If the f() value is greater than the f(x) value, then replace x with . Otherwise, the solution x remains in the current population unaltered. Update the iteration, where k = k + 1;
- Go to steps 3–5 until the stopping criterion G is satisfied;
- If finished, then output the best candidate solution.
4.2. The Proposed Chaotic Jaya (CJ) Optimizer
5. Experimental Study and Discussion
5.1. Results for the Loney’s Solenoid
5.2. Results for the Brushless DC Motor Design
6. Conclusions and Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rao, R.V. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar] [CrossRef]
- Rao, R.; More, K. Design optimization and analysis of selected thermal devices using self-adaptive Jaya algorithm. Energy Convers. Manag. 2017, 140, 24–35. [Google Scholar] [CrossRef]
- Ingle, K.K.; Jatoth, R.K. An Efficient JAYA Algorithm with Lévy Flight for Non-linear Channel Equalization. Expert Syst. Appl. 2020, 145, 112970. [Google Scholar] [CrossRef]
- Kaveh, A.; Hosseini, S.M.; Zaerreza, A. Improved Shuffled Jaya algorithm for sizing optimization of skeletal structures with discrete variables. Structures 2021, 29, 107–128. [Google Scholar] [CrossRef]
- Bingol, H.; Alatas, B. Chaos based optics inspired optimization algorithms as global solution search approach. Chaos Solitons Fractals 2020, 141, 110434. [Google Scholar] [CrossRef]
- Pierezan, J.; Coelho, L.D.S.; Mariani, V.C.; Segundo, E.H.D.V.; Prayogo, D. Chaotic coyote algorithm applied to truss optimization problems. Comput. Struct. 2021, 242, 106353. [Google Scholar] [CrossRef]
- Saxena, A.; Kumar, R.; Das, S. β-Chaotic map enabled Grey Wolf Optimizer. Appl. Soft Comput. 2019, 75, 84–105. [Google Scholar] [CrossRef]
- Ewees, A.A.; Elaziz, M.A. Performance analysis of Chaotic Multi-Verse Harris Hawks Optimization: A case study on solving engineering problems. Eng. Appl. Artif. Intell. 2020, 88, 103370. [Google Scholar] [CrossRef]
- Di Barba, P. Global optimization of Loney’s solenoid by means of a deterministic approach. Int. J. Appl. Electromagn. Mech. 1995, 6, 247–254. [Google Scholar]
- Ciuprina, G.; Ioan, D.; Munteanu, I. Use of intelligent-particle swarm optimization in electromagnetics. IEEE Trans. Magn. 2002, 38, 1037–1040. [Google Scholar] [CrossRef]
- Brisset, S.; Brochet, P. Analytical model for the optimal design of a brushless DC wheel motor. Int. J. Comput. Math. Electr. Electron. Eng. 2005, 24, 829–848. [Google Scholar] [CrossRef]
- A benchmark for a Mono and Multi Objective Optimization of the Brushless DC Wheel Motor. École Centrale de Lille (L2EP), Villeneuve-d’Ascq, France. Available online: http://l2ep.univ-lille1.fr/come/benchmarkwheel-motor.htm (accessed on 16 February 2021).
- Houssein, E.H.; Gad, A.G.; Hussain, K.; Suganthan, P.N. Major Advances in Particle Swarm Optimization: Theory, Analysis, and Application. Swarm Evol. Comput. 2021, 63, 100868. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemometr. Intell. Lab. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Ravipudi, L.; Neebha, M. Synthesis of linear antenna arrays using Jaya, self-adaptive Jaya and chaotic Jaya algorithms. Int. J. Electron. Commun. 2018, 92, 54–63. [Google Scholar] [CrossRef]
- Migallón, H.; Jimeno-Morenilla, A.; Sánchez-Romero, J.; Belazi, A. Efficient parallel and fast convergence chaotic Jaya algorithms. Swarm Evol. Comput. 2020, 56, 100698. [Google Scholar] [CrossRef]
- Jian, X.; Weng, Z. A logistic chaotic JAYA algorithm for parameters identification of photovoltaic cell and module models. Optik 2020, 203, 164041. [Google Scholar] [CrossRef]
- Premkumar, M.; Jangir, P.; Sowmya, R.; Elavarasan, R.M.; Kumar, B.S. Enhanced chaotic JAYA algorithm for parameter estimation of photovoltaic cell/modules. ISA Trans. 2021. [Google Scholar] [CrossRef] [PubMed]
- Coelho, L.D.S.; Alotto, P. Gaussian Artificial Bee Colony Algorithm Approach Applied to Loney’s Solenoid Benchmark Problem. IEEE Trans. Magn. 2011, 47, 1326–1329. [Google Scholar] [CrossRef]
- Coelho, L.D.S.; Alotto, P. Electromagnetic Optimization Using a Cultural Self-Organizing Migrating Algorithm Approach Based on Normative Knowledge. IEEE Trans. Magn. 2009, 45, 1446–1449. [Google Scholar] [CrossRef]
- Coelho, L.D.S.; Alotto, P. Tribes Optimization Algorithm Applied to the Loney’s Solenoid. IEEE Trans. Magn. 2009, 45, 1526–1529. [Google Scholar] [CrossRef]
- Duan, H.; Li, C. Quantum-Behaved Brain Storm Optimization Approach to Solving Loney’s Solenoid Problem. IEEE Trans. Magn. 2014, 51, 1–7. [Google Scholar] [CrossRef]
- Duan, H.; Li, J. Gaussian Harmony Search Algorithm: A Novel Method for Loney’s Solenoid Problem. IEEE Trans. Magn. 2013, 50, 83–87. [Google Scholar] [CrossRef]
- Moussouni, F.; Brisset, S.; Brochet, P. Some results on the design of brushless DC wheel motor using SQP and GA. Int. J. Appl. Electromagn. Mech. 2007, 26, 233–241. [Google Scholar] [CrossRef]
- Moussouni, F.; Brisset, S.; Brochet, P. Comparison of two multi-agent algorithms: ACO and PSO for the optimization of a brushless DC wheel motor. In Intelligent Computer Techniques in Applied Electromagnetics; Wiak, S., Krawczyk, A., Dolezel, I., Eds.; Studies in Computational Intelligence; Springer: Heidelberg, Germany, 2008; Volume 119. [Google Scholar]
- Segundo, E.H.D.V.; Mariani, V.C.; Coelho, L.D.S. Design of heat exchangers using Falcon Optimization Algorithm. Appl. Therm. Eng. 2019, 156, 119–144. [Google Scholar] [CrossRef]
- Segundo, E.H.D.V.; Mariani, V.C.; Coelho, L.D.S. Metaheuristic inspired on owls behavior applied to heat exchangers design. Therm. Sci. Eng. Prog. 2019, 14, 100431. [Google Scholar] [CrossRef]
- Pierezan, J.; Maidl, G.; Yamao, E.M.; Coelho, L.D.S.; Mariani, V.C. Cultural coyote optimization algorithm applied to a heavy duty gas turbine operation. Energy Convers. Manag. 2019, 199, 111932. [Google Scholar] [CrossRef]
- Klein, C.E.; Coelho, L.S. Meerkats-inspired algorithm for global optimization problems. In Proceedings of the 26th European Symposium on Artificial Neural Networks (ESANN), Bruges, Belgium, 25–27 April 2018; pp. 679–684. [Google Scholar]
- Klein, C.E.; Mariani, V.C.; Coelho, L.S. Cheetah based optimization algorithm: A novel swarm intelligence paradigm. In Proceedings of the 26th European Symposium on Artificial Neural Networks (ESANN), Bruges, Belgium, 25–27 April 2018; pp. 685–690. [Google Scholar]


{kind=link}
| Symbol | Meaning | Lower Value | Upper Value |
|---|---|---|---|
| δ (A/m2) | Conductor current density | 2.0·106 | 5.0·106 |
| Be (T) | Air gap induction | 0.50 | 0.76 |
| Bcs (T) | Stator back iron induction | 0.6 | 1.6 |
| Bd (T) | Teeth magnetic induction | 0.9 | 1.8 |
| Ds (m) | Bore (stator) diameter | 0.15 | 0.33 |
| Symbol | Meaning | Lower Value | Upper Value |
|---|---|---|---|
| Mtot (kg) | Total mass | g1 | Mtot − 15 ≤ 0 |
| discr (Ds, δ, Bd, Be) | Determinant used for the calculation of the slot height | g2 | −discr ≤ 0 |
| Imax (A) | Maximum current in the phases | g3 | 125 − Imax ≤ 0 |
| Ta (°C) | Motor temperature | g4 | Ta − 120 ≤ 0 |
| Din (mm) | Inner diameter | g5 | 76 − Din ≤ 0 |
| Dext (mm) | Outer diameter | g6 | Dext − 340 ≤ 0 |
| Optimizer | Minimum (10−8) (Best) | Mean | Maximum (Worst) | Standard Deviation |
|---|---|---|---|---|
| Jaya | 3.4564 | 1.74·10−7 | 9.32·10−6 | 3.82·10−7 |
| CJ (1) | 2.4380 | 3.38·10−8 | 4.39·10−8 | 7.03·10−11 |
| CJ (2) | 3.1906 | 2.24·10−7 | 7.93·10−6 | 2.95·10−7 |
| CJ (3) | 7.7139 | 9.60·10−5 | 1.51·10−3 | 8.95·10−5 |
| CJ (4) | 3.0942 | 6.94·10−8 | 1.84·10−6 | 7.38·10−8 |
| CJ (5) | 2.0566 | 6.60·10−8 | 1.93·10−6 | 3.20·10−7 |
| CJ (6) | 3.0217 | 2.07·10−7 | 6.60·10−6 | 4.19·10−7 |
| CJ (7) | 2.1721 | 6.48·10−8 | 1.37·10−6 | 4.58·10−8 |
| CJ (8) | 2.2034 | 5.88·10−7 | 3.42·10−5 | 1.49·10−6 |
| CJ (9) | 3.8248 | 1.11·10−5 | 3.65·10−4 | 1.04·10−5 |
| CJ (10) | 3.9749 | 5.96·10−5 | 8.21·10−4 | 1.75·10−5 |
| Optimizer | Minimum (10−8) | Mean |
|---|---|---|
| CJ (1) | 2.4380 | 3.38 |
| CJ (5) | 2.0566 | 6.60 |
| CJ (8) | 2.1721 | 6.48 |
| GABC (0.1) [19] | 2.2010 | 3.33 |
| GABC (0.3) [19] | 2.0658 | 3.87 |
| Cultural SOMA [20] | 2.4338 | 3.40 |
| TRIBES [21] | 2.0595 | 3.48 |
| QBSO [22] | 3.3990 | 3.57 |
| GHS [23] | 3.8035 | 3.40 |
| Optimizer | Minimum (Worst) | Mean | Maximum (Best) | Standard Deviation |
|---|---|---|---|---|
| Jaya | 94.67 | 95.17 | 95.31 | 1.67·10−3 |
| CJ (1) | 94.40 | 95.12 | 95.31 | 1.67·10−3 |
| CJ (2) | 92.85 | 94.25 | 95.21 | 6.64·10−3 |
| CJ (3) | 94.32 | 95.23 | 95.32 | 1.63·10−3 |
| CJ (4) | 92.69 | 93.87 | 95.08 | 7.55·10−3 |
| CJ (5) | 93.67 | 94.84 | 95.32 | 4.17·10−3 |
| CJ (6) | 93.10 | 94.91 | 95.32 | 4.58·10−3 |
| CJ (7) | 93.53 | 94.46 | 95.29 | 5.09·10−3 |
| CJ (8) | 94.94 | 95.27 | 95.32 | 8.66·10−4 |
| CJ (9) | 94.14 | 94.97 | 95.32 | 2.89·10−3 |
| CJ (10) | 94.97 | 95.24 | 95.32 | 8.11·10−4 |
| Optimizer | η | NE * |
|---|---|---|
| Sequential quadratic programming (SQP) [24] | 95.32 | 90 |
| Genetic algorithm (GA) [24] | 95.31 | 3380 |
| GA and SQP [24] | 95.31 | 1644 |
| Ant colony optimization (ACO) [25] | 95.32 | 1200 |
| Particle swarm optimization (PSO) [25] | 94.98 | 1600 |
| CJ (3), (5), CJ (6), CJ (8), CJ (9), CJ (10) | 95.32 | 900 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coelho, L.d.S.; Mariani, V.C.; Goudos, S.K.; Boursianis, A.D.; Kokkinidis, K.; Kantartzis, N.V. Chaotic Jaya Approaches to Solving Electromagnetic Optimization Benchmark Problems. Telecom 2021, 2, 222-231. https://doi.org/10.3390/telecom2020015
Coelho LdS, Mariani VC, Goudos SK, Boursianis AD, Kokkinidis K, Kantartzis NV. Chaotic Jaya Approaches to Solving Electromagnetic Optimization Benchmark Problems. Telecom. 2021; 2(2):222-231. https://doi.org/10.3390/telecom2020015
Chicago/Turabian StyleCoelho, Leandro dos S., Viviana C. Mariani, Sotirios K. Goudos, Achilles D. Boursianis, Konstantinos Kokkinidis, and Nikolaos V. Kantartzis. 2021. "Chaotic Jaya Approaches to Solving Electromagnetic Optimization Benchmark Problems" Telecom 2, no. 2: 222-231. https://doi.org/10.3390/telecom2020015
APA StyleCoelho, L. d. S., Mariani, V. C., Goudos, S. K., Boursianis, A. D., Kokkinidis, K., & Kantartzis, N. V. (2021). Chaotic Jaya Approaches to Solving Electromagnetic Optimization Benchmark Problems. Telecom, 2(2), 222-231. https://doi.org/10.3390/telecom2020015