
A Hybrid User Mobility Prediction Approach for Handover Management in Mobile Networks


Abstract
:1. Introduction
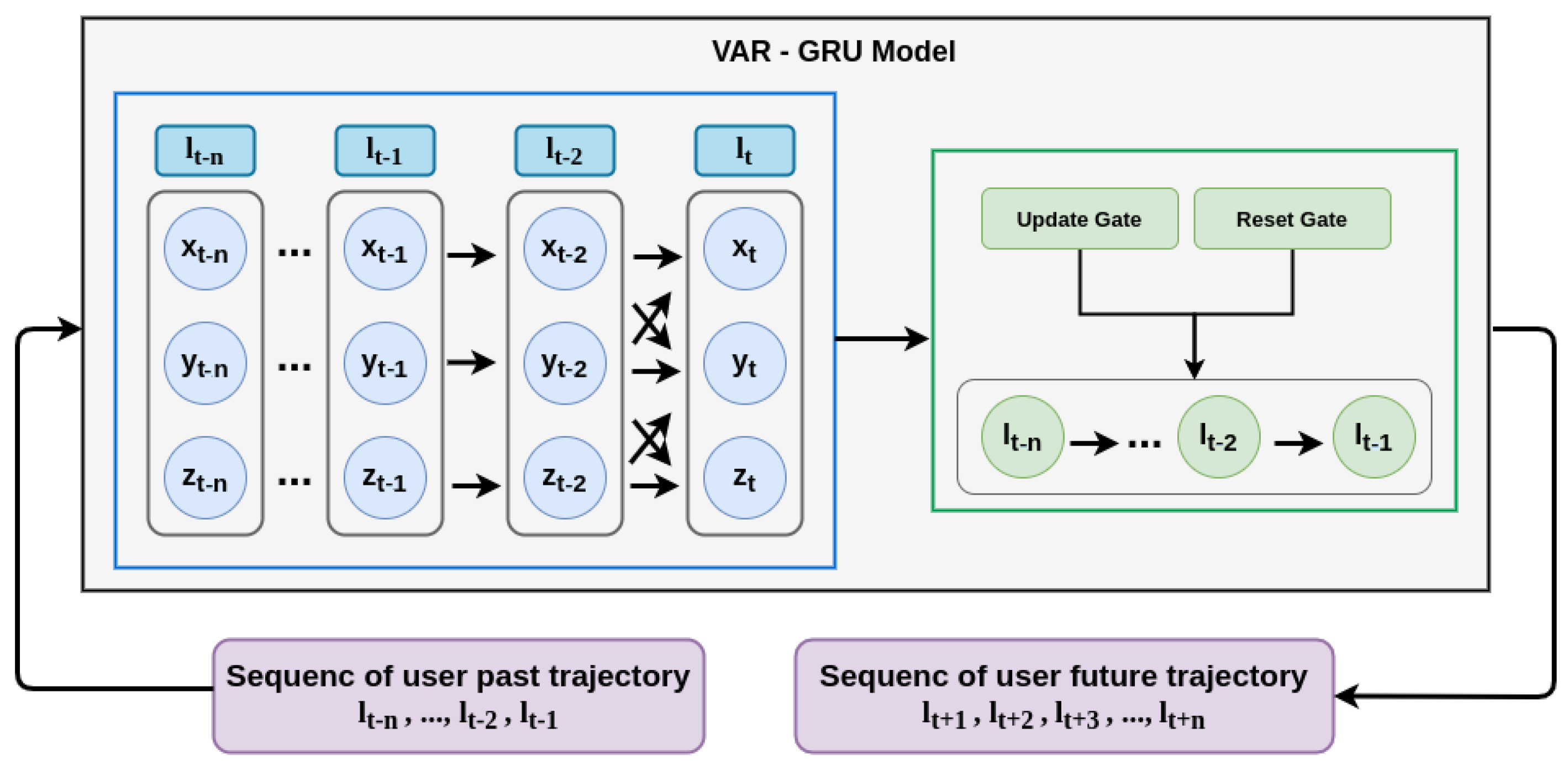
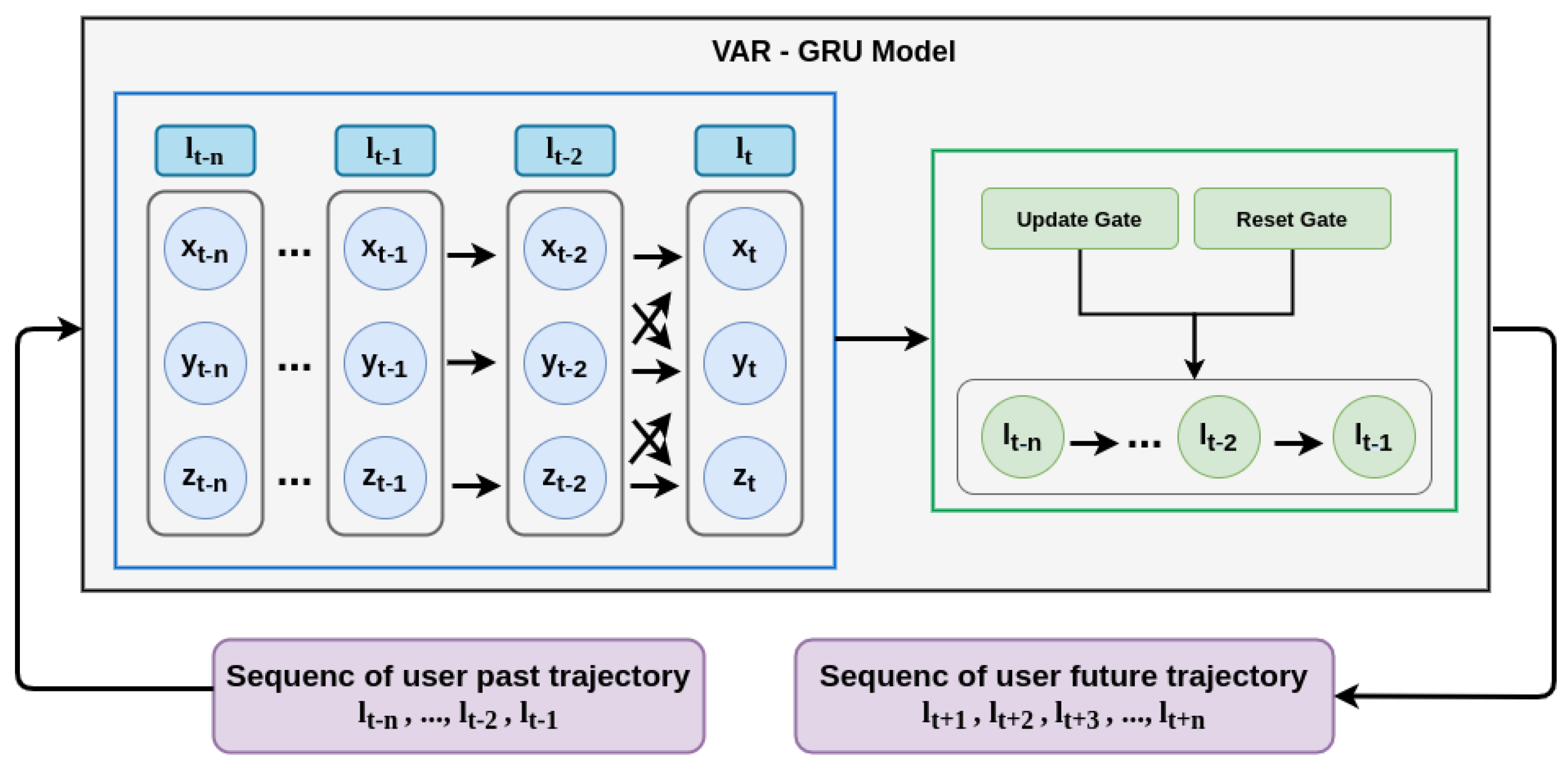
- Proposing a mobility prediction technique to model user mobility behaviour. The proposed VAR-GRU model predicts the future trajectory (i.e., path) of a user. The core concept is to fully analyze the existing dependencies in a user’s past trajectories and to extract general patterns in the data.
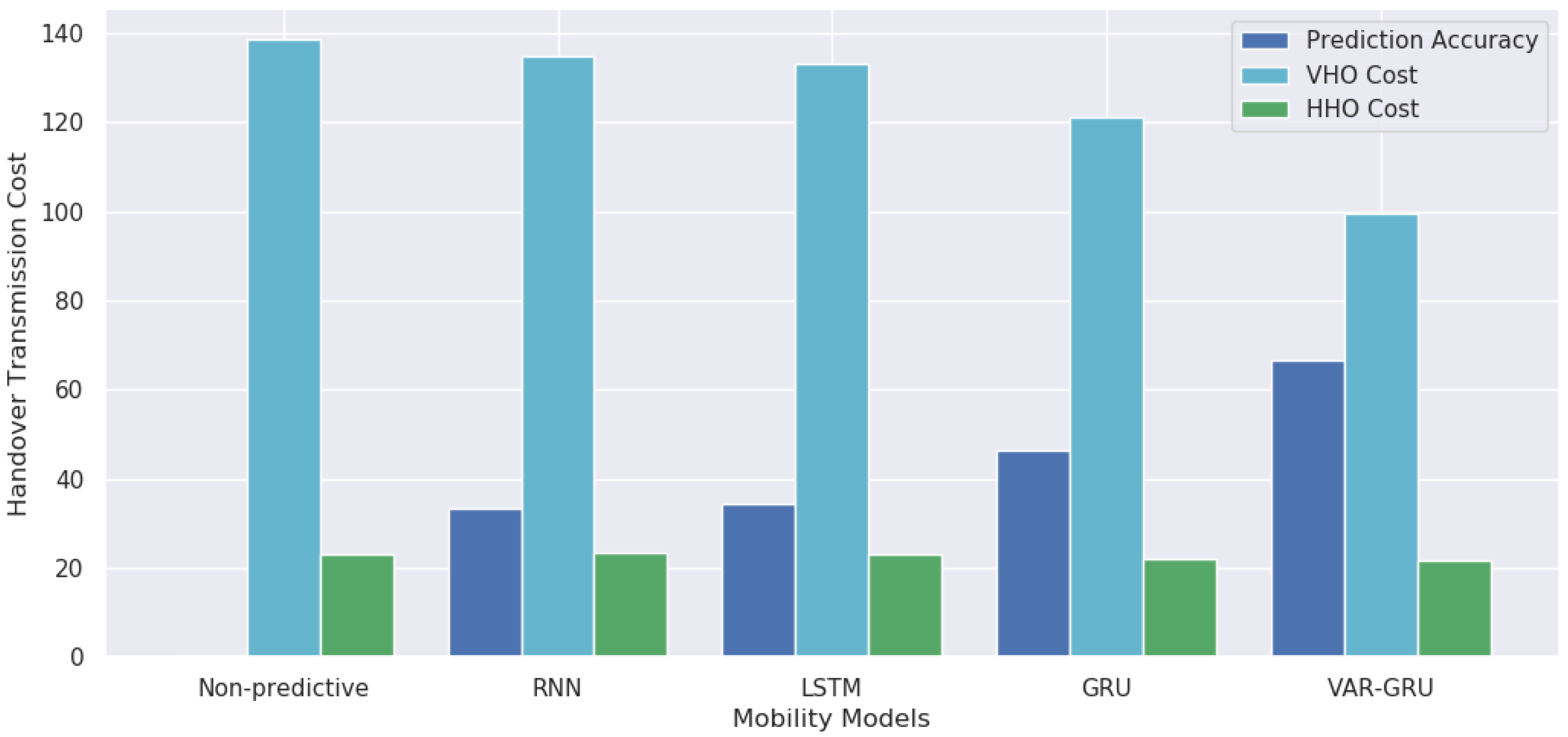
- Investigating the impact of user mobility prediction on the conventional handover signaling procedure. Handover processing and transmission costs are evaluated to compare the predictive and non-predictive scenarios.
- Conducting experiments on the user mobility data generated from real users to provide an in-depth analysis of the effectiveness of the proposed approach.
2. Related Works
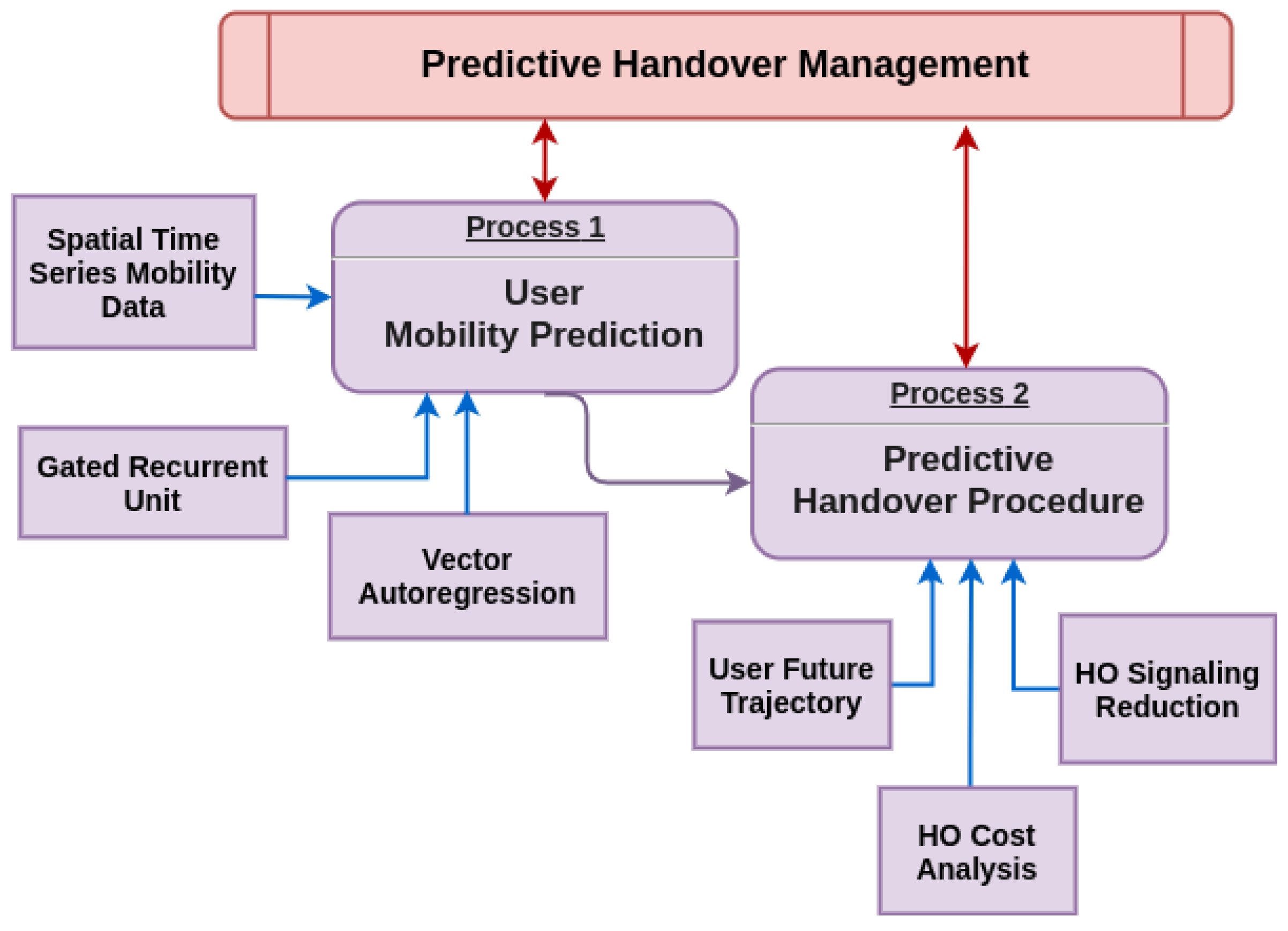
3. The Proposed Predictive Handover Management Approach
3.1. User Mobility Prediction
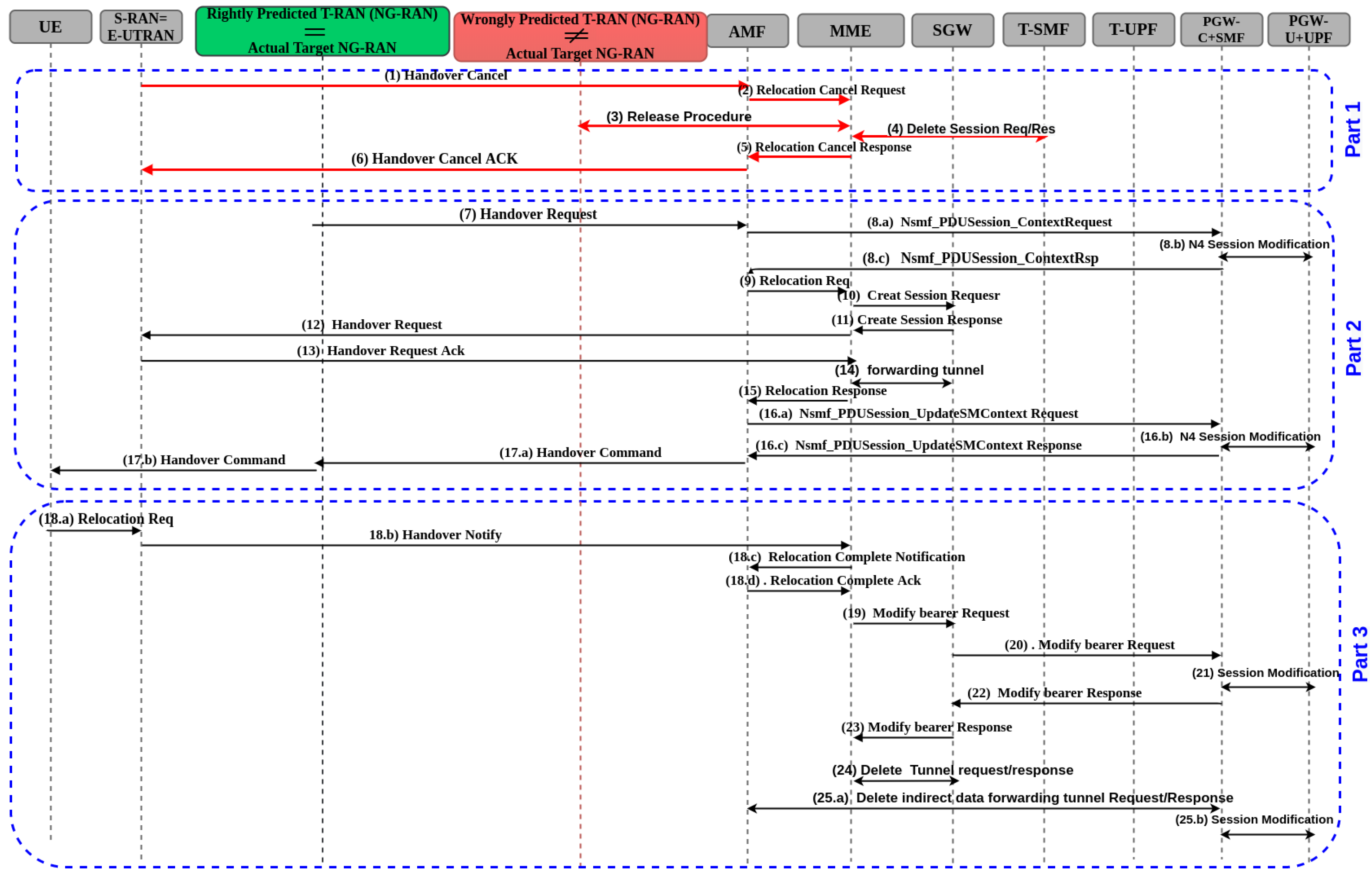
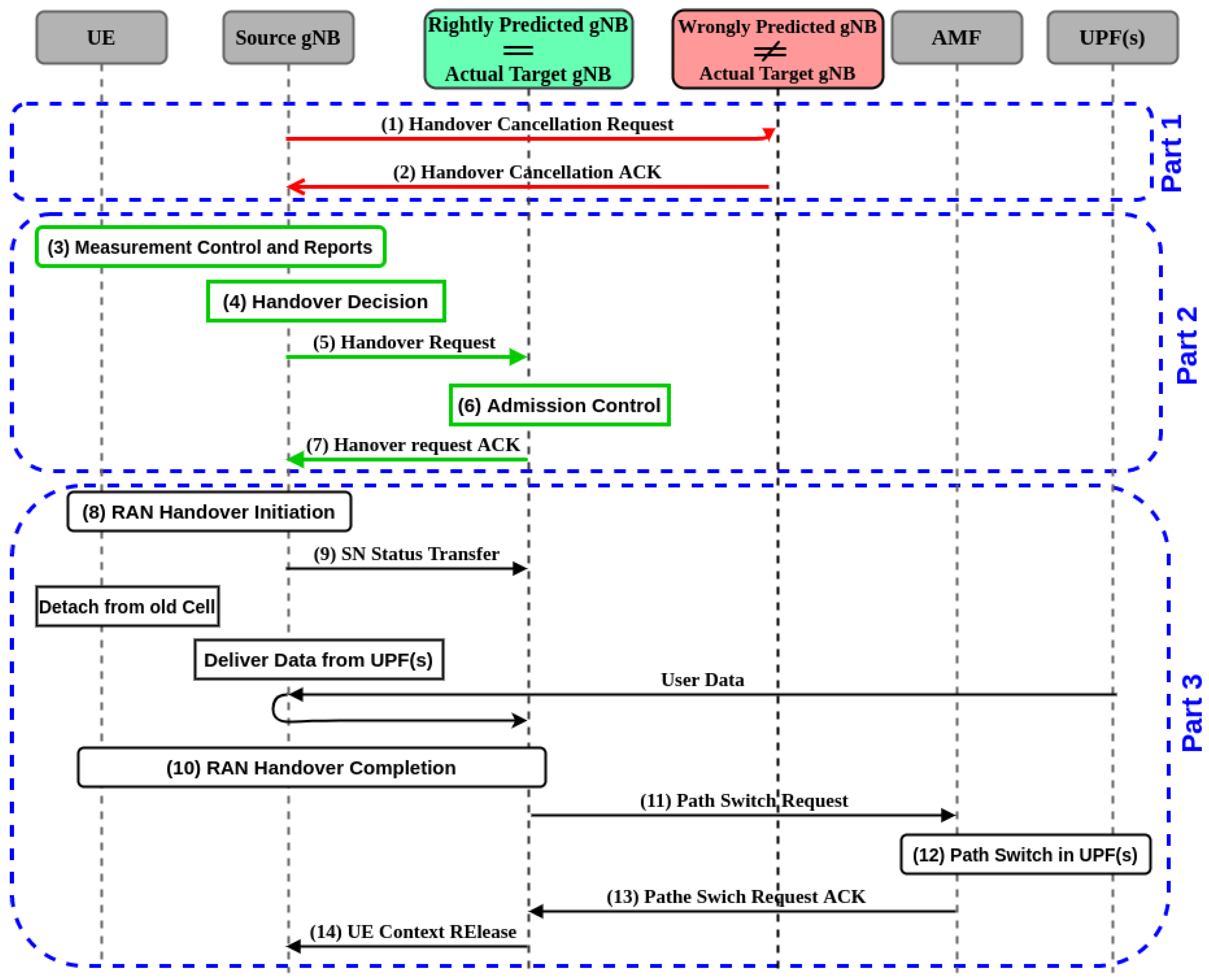
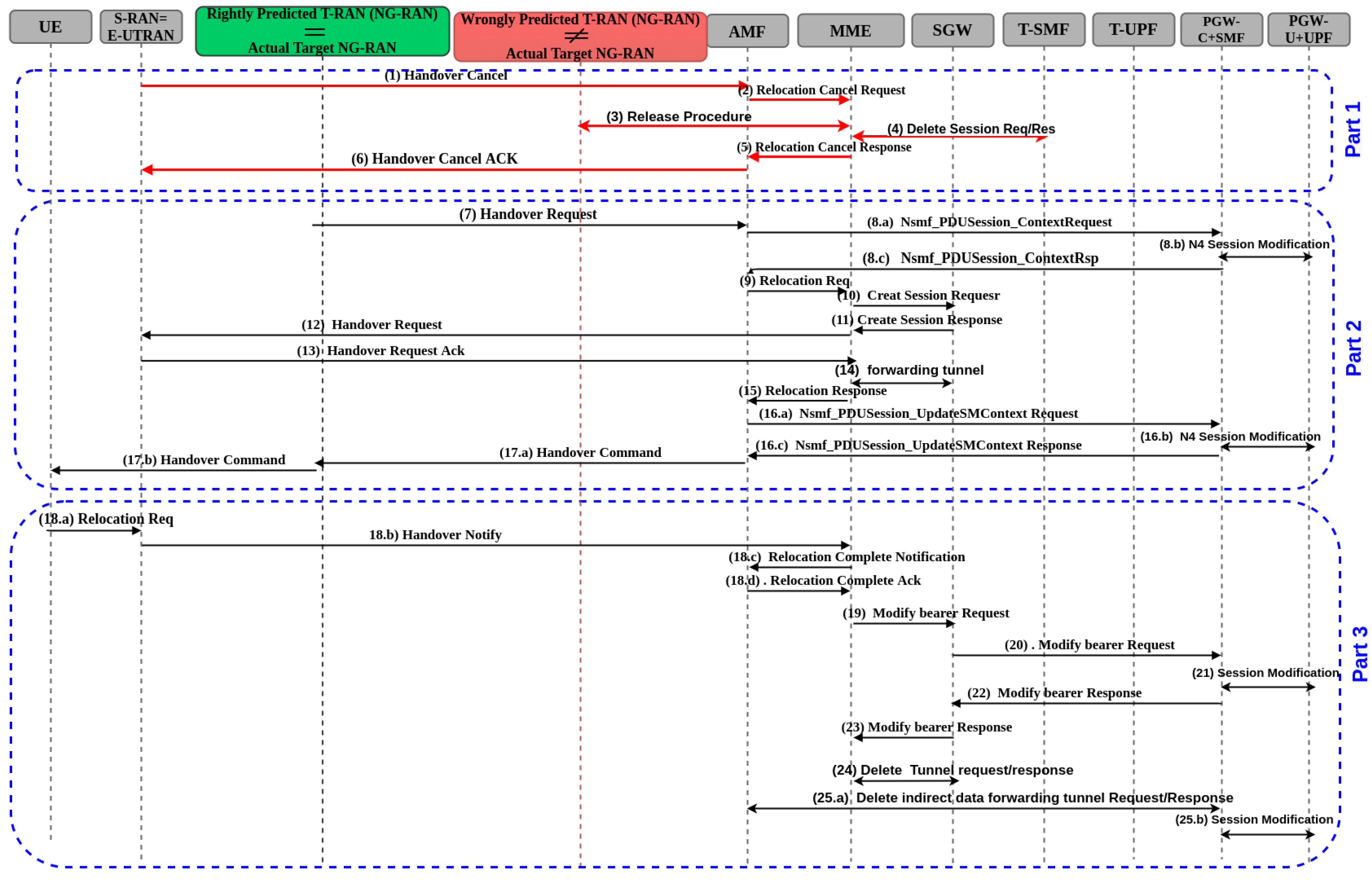
3.2. Predictive Handover Procedure
4. Handover Signaling Cost Analysis
4.1. Processing Cost
4.2. Transmission Cost
5. Experimental Results
5.1. Mobility Data Description
5.2. Comparison
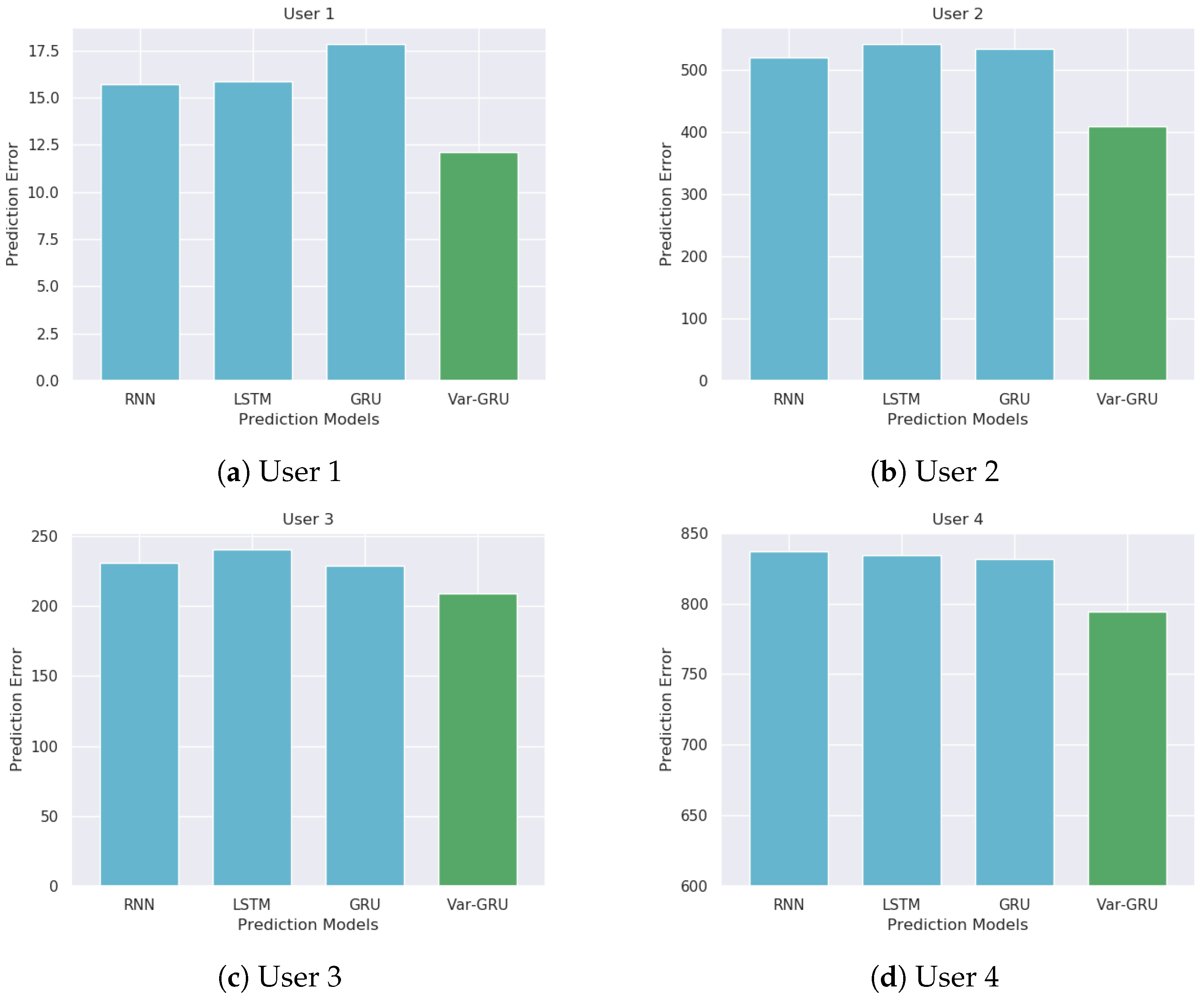
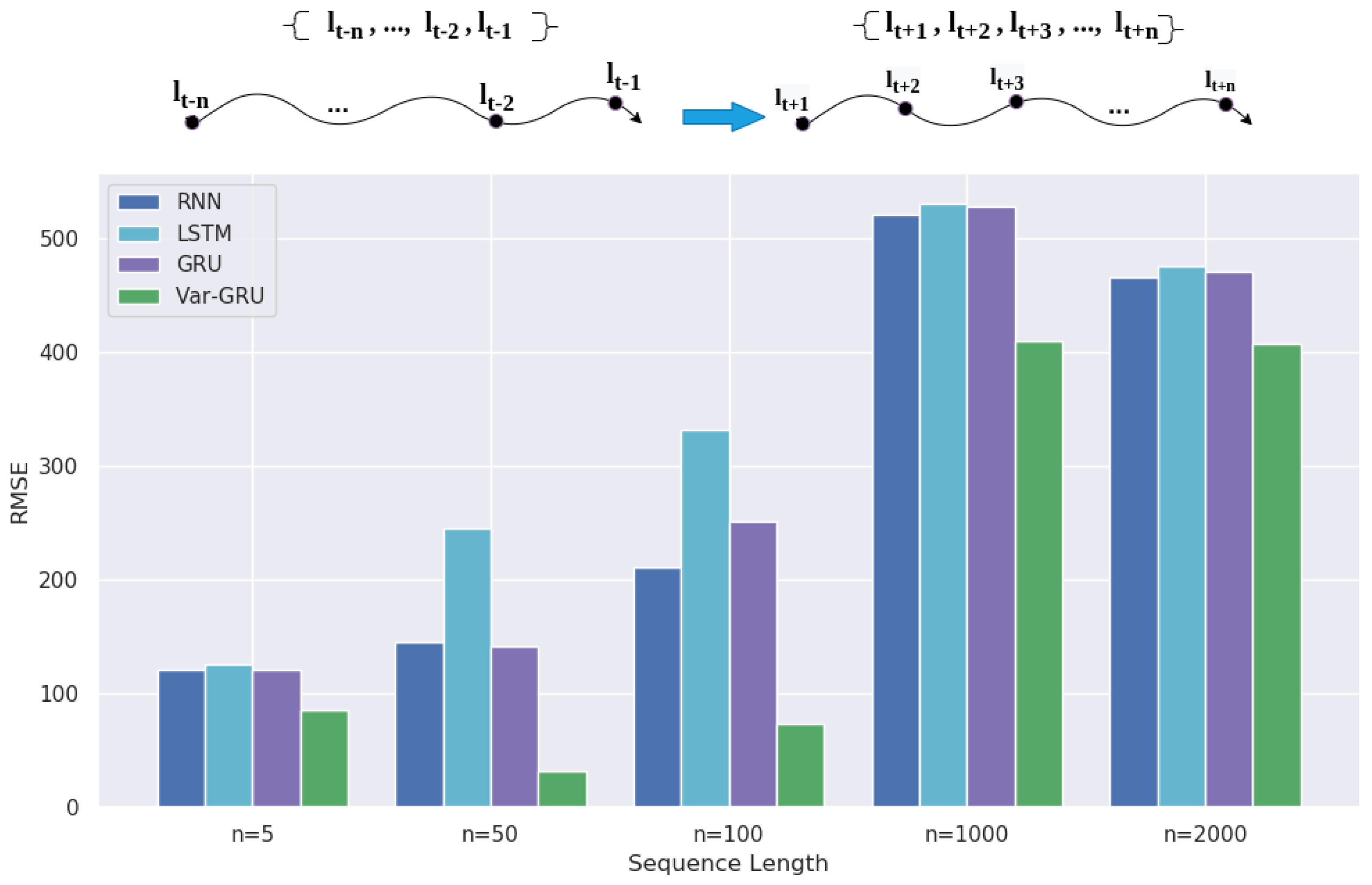
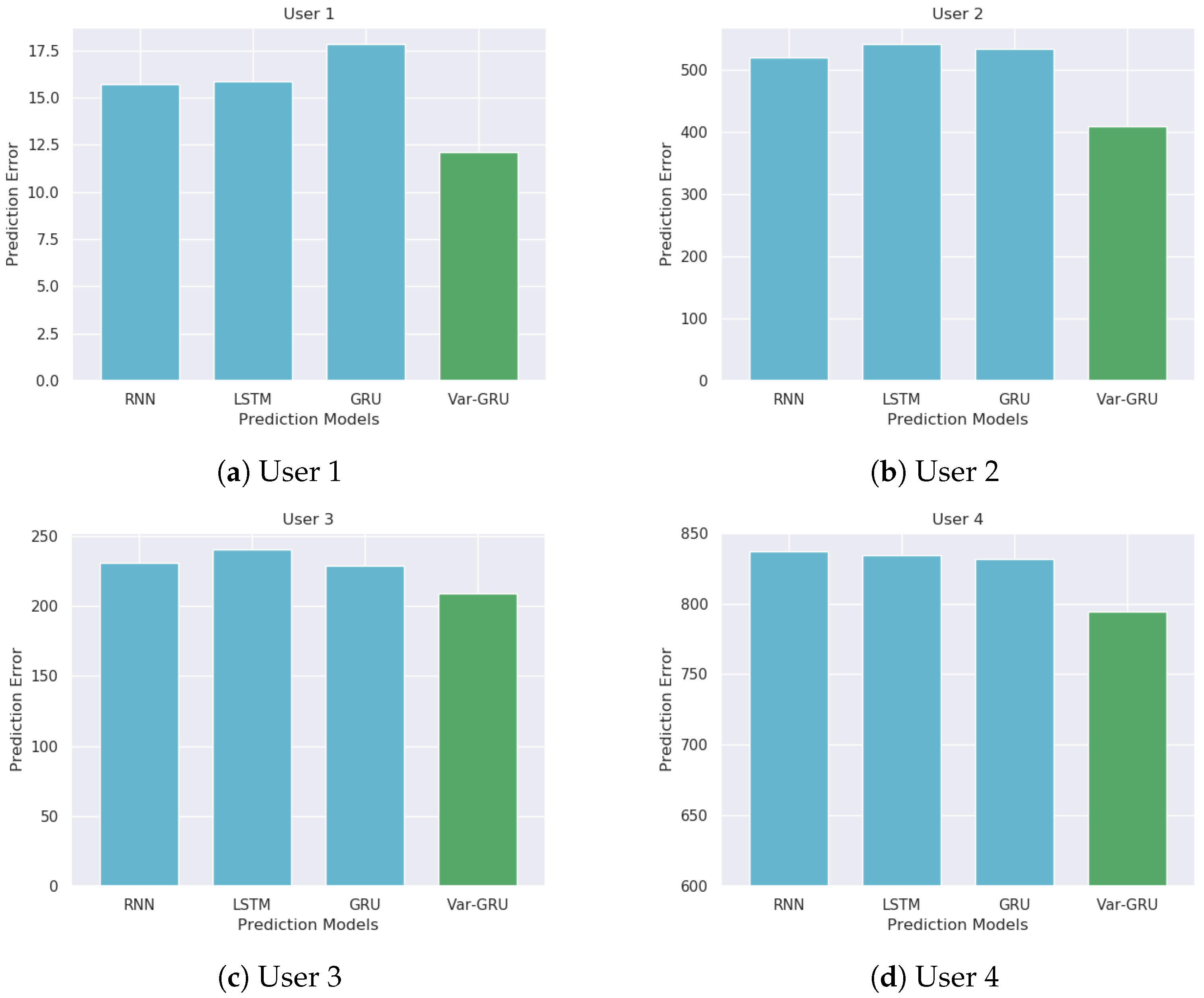
- Recurrent neural network [26]: a RNN-based mobility model analyzes the user’s past locations sequentially.
- Long short-term memory [27]: LSTM-based approaches deploy state units and a forget gate to learn the mobility pattern.
- Gated recurrent unit [28]: GRU-based techniques control the impact of the latest observations using update and reset gates.
5.3. Experimental Settings
5.4. Mobility Model Performance
5.5. Impact of Prediction on HO Costs
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cisco. Cisco Annual Internet Report (2018–2023) White Paper. 2020. Available online: https://www.cisco.com/c/en/us/solutions/collateral/executive-perspectives/annual-internet-report/white-paper-c11-741490.html (accessed on 9 March 2020).
- Fazio, P.; De Rango, F.; Tropea, M. Prediction and QoS Enhancement in New Generation Cellular Networks With Mobile Hosts: A Survey on Different Protocols and Conventional/Unconventional Approaches. IEEE Commun. Surv. Tutor. 2017, 19, 1822–1841. [Google Scholar] [CrossRef]
- O’Connell, E.; Moore, D.; Newe, T. Challenges Associated with Implementing 5G in Manufacturing. Telecom 2020, 1, 48–67. [Google Scholar] [CrossRef]
- Klaine, P.V.; Imran, M.A.; Onireti, O.; Souza, R.D. A Survey of Machine Learning Techniques Applied to Self-Organizing Cellular Networks. IEEE Commun. Surv. Tutor. 2017, 19, 2392–2431. [Google Scholar] [CrossRef] [Green Version]
- Di Taranto, R.; Muppirisetty, S.; Raulefs, R.; Slock, D.; Svensson, T.; Wymeersch, H. Location-Aware Communications for 5G Networks: How location information can improve scalability, latency, and robustness of 5G. IEEE Signal Process. Mag. 2014, 31, 102–112. [Google Scholar] [CrossRef] [Green Version]
- Zivot, E.; Wang, J. Vector Autoregressive Models for Multivariate Time Series. In Modeling Financial Time Series with S-Plus®; Springer: New York, NY, USA, 2003; pp. 369–413. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; The MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Adege, A.B.; Lin, H.; Wang, L. Mobility Predictions for IoT Devices Using Gated Recurrent Unit Network. IEEE Internet Things J. 2020, 7, 505–517. [Google Scholar] [CrossRef]
- Lu, Z.; Zhao, F.; Luo, H.; Wang, Q.; Shao, W. A Destination Prediction Algorithm Using Spatial Temporal Bidirectional LSTM Networks. In Proceedings of the IPIN 2019, Pisa, Italy, 30 September–3 October 2019. [Google Scholar]
- Wang, C.; Ma, L.; Li, R.; Durrani, T.S.; Zhang, H. Exploring Trajectory Prediction Through Machine Learning Methods. IEEE Access 2019, 7, 101441–101452. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, J.; Zhou, R.; Liu, C.; Zhao, P.; Zhao, L. Predicting Destinations by a Deep Learning based Approach. IEEE Trans. Knowl. Data Eng. 2021, 33, 651–666. [Google Scholar] [CrossRef]
- Fu, T.Y.; Lee, W.C. Trembr: Exploring Road Networks for Trajectory Representation Learning. ACM Trans. Intell. Syst. Technol. (TIST) 2020, 11. [Google Scholar] [CrossRef] [Green Version]
- Bahra, N.; Pierre, S. RNN-Based User Trajectory Prediction Using a Preprocessed Dataset. In Proceedings of the 2020 16th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Thessaloniki, Greece, 12–14 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sadri, A.; Salim, F.; Ren, Y.; Shao, W.; Krumm, J.; Mascolo, C. What Will You Do for the Rest of the Day?: An Approach to Continuous Trajectory Prediction. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 1–26. [Google Scholar] [CrossRef]
- Ozturk, M.; Gogate, M.; Onireti, O.; Adeel, A.; Hussain, A.; Imran, M.A. A novel deep learning driven, low-cost mobility prediction approach for 5G cellular networks: The case of the Control/Data Separation Architecture (CDSA). Neurocomputing 2019, 358, 479–489. [Google Scholar] [CrossRef]
- Chen, Y.; Long, C.; Cong, G.; Li, C. Context-Aware Deep Model for Joint Mobility and Time Prediction. In Proceedings of the 13th International Conference on Web Search and Data Mining, WSDM ’20, Houston, TX, USA, 3–7 February 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 106–114. [Google Scholar] [CrossRef]
- Gao, Q.; Zhou, F.; Trajcevski, G.; Zhang, K.; Zhong, T.; Zhang, F. Predicting Human Mobility via Variational Attention. In Proceedings of the World Wide Web Conference, WWW ’19, San Francisco, CA, USA, 13–17 May 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 2750–2756. [Google Scholar] [CrossRef]
- Mohamed, A.; Onireti, O.; Hoseinitabatabaei, S.A.; Imran, M.; Imran, A.; Tafazolli, R. Mobility prediction for handover management in cellular networks with control/data separation. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 3939–3944. [Google Scholar] [CrossRef] [Green Version]
- Nadembega, A.; Hafid, A.; Taleb, T. A Destination and Mobility Path Prediction Scheme for Mobile Networks. IEEE Trans. Veh. Technol. 2015, 64, 2577–2590. [Google Scholar] [CrossRef]
- Farooq, H.; Imran, A. Spatiotemporal Mobility Prediction in Proactive Self-Organizing Cellular Networks. IEEE Commun. Lett. 2017, 21, 370–373. [Google Scholar] [CrossRef]
- Vasilakos, X.; Al-Khalidi, M.; Siris, V.A.; Reed, M.J.; Thomos, N.; Polyzos, G.C. Mobility-based Proactive Multicast for Seamless Mobility Support in Cellular Network Environments. In Proceedings of the Workshop on Mobile Edge Communications, MECOMM ’17, Los Angeles, CA, USA, 21–25 August 2017; ACM: New York, NY, USA, 2017; pp. 25–30. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, V.; Mahalunkar, A.; Garbinato, B.; Kelleher, J.D. On the Inability of Markov Models to Capture Criticality in Human Mobility. In Proceedings of the Artificial Neural Networks and Machine Learning–ICANN 2019: Image Processing, Munich, Germany, 17–19 September 2019; Springer: Cham, Switzerland, 2019. [Google Scholar]
- 5G. Procedures for the 5G System (5GS). (3GPP TS 23.502 Version 15.4.1 Release 15) 2019, 1. Available online: https://www.etsi.org/deliver/etsi_ts/123500_123599/123502/15.04.01_60/ts_123502v150401p.pdf (accessed on 1 March 2019).
- Jain, A.; Lopez-Aguilera, E.; Demirkol, I. Evolutionary 4G/5G Network Architecture Assisted Efficient Handover Signaling. IEEE Access 2019, 7, 256–283. [Google Scholar] [CrossRef]
- Oh, S.; Ryu, B.; Shin, Y. EPC signaling load impact over S1 and X2 handover on LTE-Advanced system. In Proceedings of the 2013 Third World Congress on Information and Communication Technologies (WICT 2013), Hanoi, Vietnam, 15–18 December 2013; pp. 183–188. [Google Scholar] [CrossRef]
- Rumlehart, D.E.; Smolensky, P.; McClelland, J.L.; Hinton, G.E. Schemata and Sequential Thought Processes in PDP Models. In Parallel Distributed Processing: Explorations in the Microstructure of Cognition, Vol. 2: Psychological and Biological Models; MIT Press: Cambridge, MA, USA, 1986; pp. 7–57. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Chung, J.; Gülçehre, Ç.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Song, C.; Qu, Z.; Blumm, N.; Barabási, A.L. Limits of Predictability in Human Mobility. Science 2010, 327, 1018–1021. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| b, , | Bias vectors | U, , | Input weight matrices |
| W, , | Recurrent weight matrices | Hidden states | |
| Update gate | Reset gate |
| Number of layers | 4 | Model optimizer | SGD |
| Number of neurons | 100 | Learning rate | 0.001 |
| Weight initializer | Glorot uniform | Loss function | RMSE, MAE |
| Training data percentage | 75% | Sequence length | 5–2000 |
| Batch size | 10 | Dropout rate | 0.2 |
| Users | RNN | LSTM | GRU | VAR-GRU |
|---|---|---|---|---|
| User 1 | ||||
| User 2 | ||||
| User 3 | ||||
| User 4 |
| Link Type | Delay |
|---|---|
| UE to NG-RAN | 1 ms |
| NG-RAN to AMF | 7.5 ms |
| AMF to SeMMu (PGW-C + SMF) | 1 ms |
| SeMMu to S-GW | 7.5 ms |
| SeMMu to PGW-U+UPF | 7.5 ms |
| SeMMu to PCRF+PCF | 7.5 ms |
| AMF to AMF | 15 ms |
| SeMMu to PGW | 7.5 ms |
| SeMMu to E-UTRAN | 7.5 ms |
| E-UTRAN to UE | 1 ms |
| PGW to PCRF | 7.5 ms |
| S-GW to PGW | 7.5 ms |
| SeMMu to SGSN | 1 ms |
| SGSN to RNC | 6 ms |
| SGSN to S-GW | 7.5 ms |
| SeMMu to SeMMu | 15 ms |
| Handover Type | Approach | Processing Cost |
|---|---|---|
| HHO | Conventional Handover Signaling | 12 Messages |
| Proposed Handover Signaling with right prediction | 7 Messages | |
| Proposed Handover Signaling with wrong prediction | 14 Messages | |
| VHO | Conventional Handover Signaling | 28 Messages |
| Proposed Handover Signaling with right prediction | 12 Messages | |
| Proposed Handover Signaling with wrong prediction | 34 Messages |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bahra, N.; Pierre, S. A Hybrid User Mobility Prediction Approach for Handover Management in Mobile Networks. Telecom 2021, 2, 199-212. https://doi.org/10.3390/telecom2020013
Bahra N, Pierre S. A Hybrid User Mobility Prediction Approach for Handover Management in Mobile Networks. Telecom. 2021; 2(2):199-212. https://doi.org/10.3390/telecom2020013
Chicago/Turabian StyleBahra, Nasrin, and Samuel Pierre. 2021. "A Hybrid User Mobility Prediction Approach for Handover Management in Mobile Networks" Telecom 2, no. 2: 199-212. https://doi.org/10.3390/telecom2020013
APA StyleBahra, N., & Pierre, S. (2021). A Hybrid User Mobility Prediction Approach for Handover Management in Mobile Networks. Telecom, 2(2), 199-212. https://doi.org/10.3390/telecom2020013