
Experimental Characterization of Ferroelectric Capacitor Circuits for the Realization of Simply Designed Electroceuticals


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
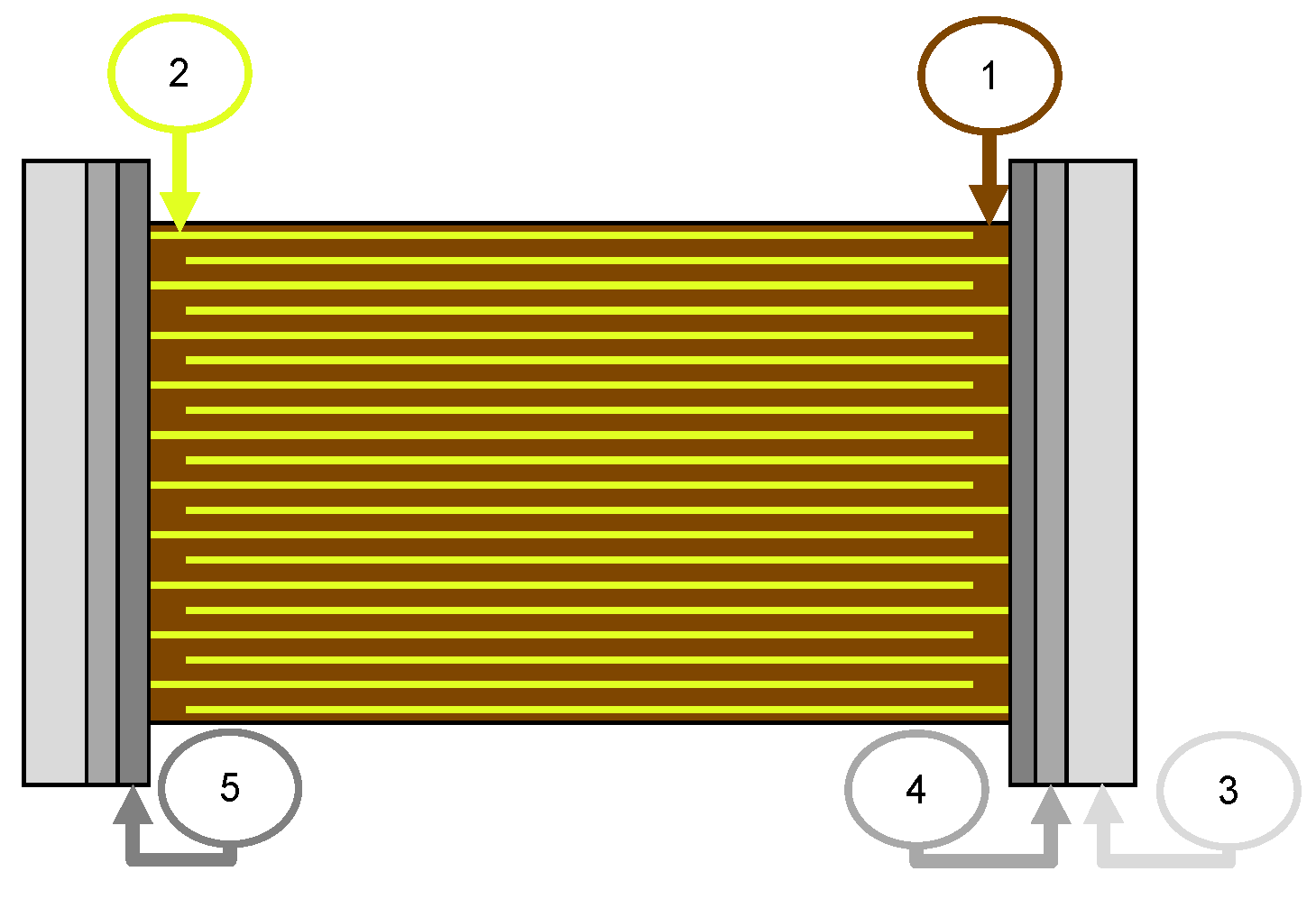
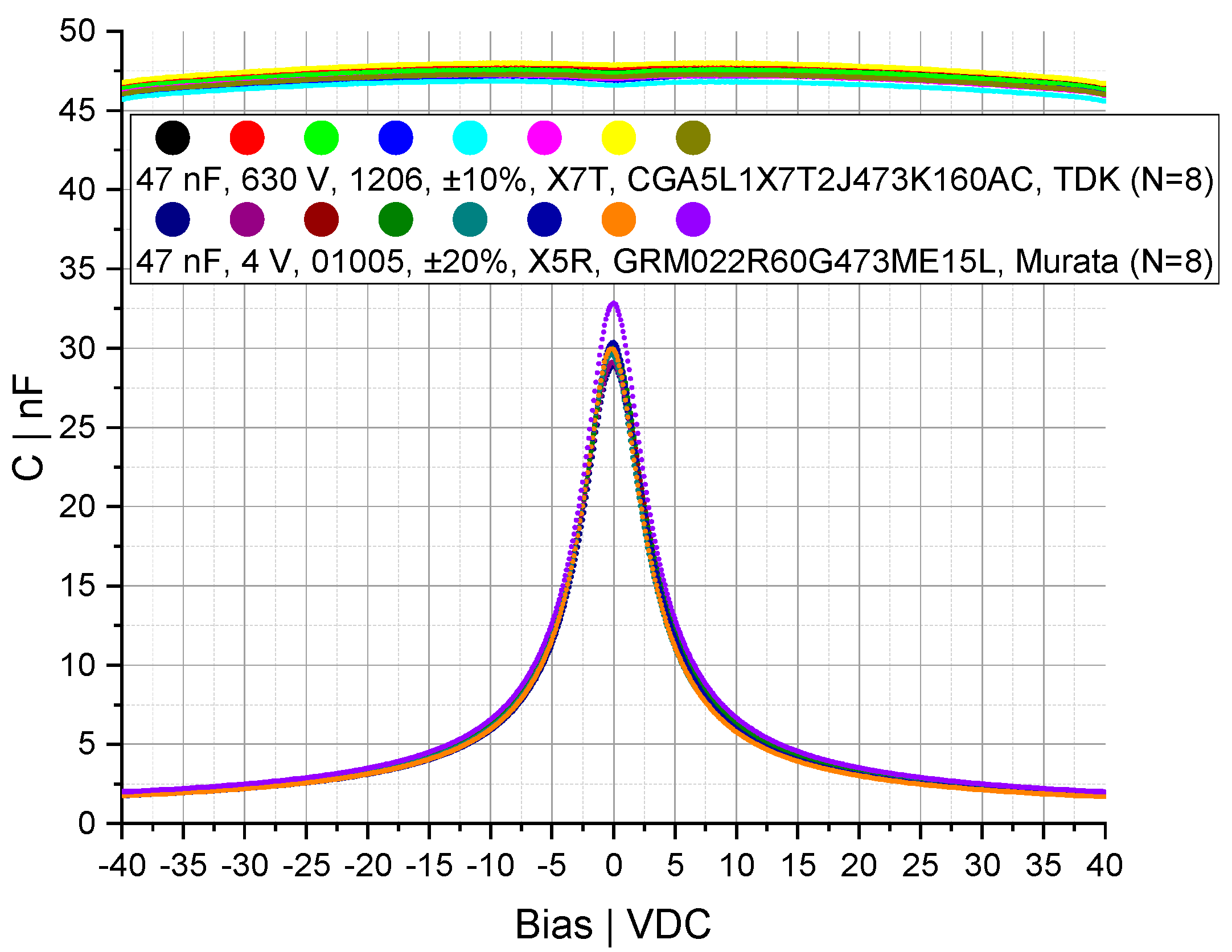
2.1. Characterization of Ceramic Capacitors by Measurement
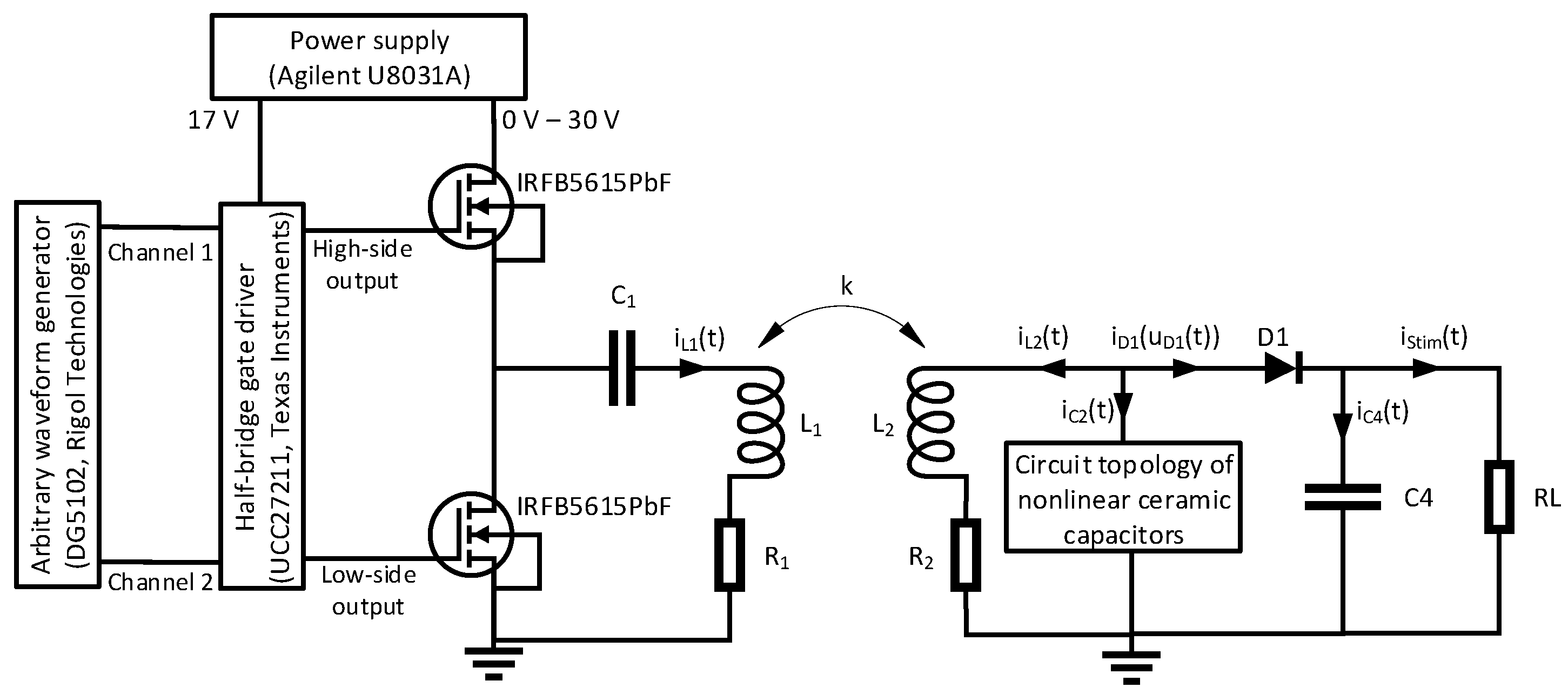
2.2. Characterization of the Circuit Topologies by Measurement
2.3. Modeling in Mathcad
- : inductive coupling factor between the inductances L1 and L2;
- : amplitude of the sinusoidal voltage ;
- : angular frequency of the sinusoidal voltage
- : electrical current across the primary resonant circuit;
- : electrical voltage across the capacitor C1;
- : electrical current across inductance L2 and its loss resistance R2;
- : electrical current across the capacitor C2;
- : electrical voltage across the capacitor C2;
- : electrical voltage across diode D1;
- : electrical current flowing through the diode D1 as a function of the voltage ;
- : electrical voltage across the capacitor C4;
- : electrical current across the capacitor C4;
- : electrical current across the resistive load RL.
3. Results
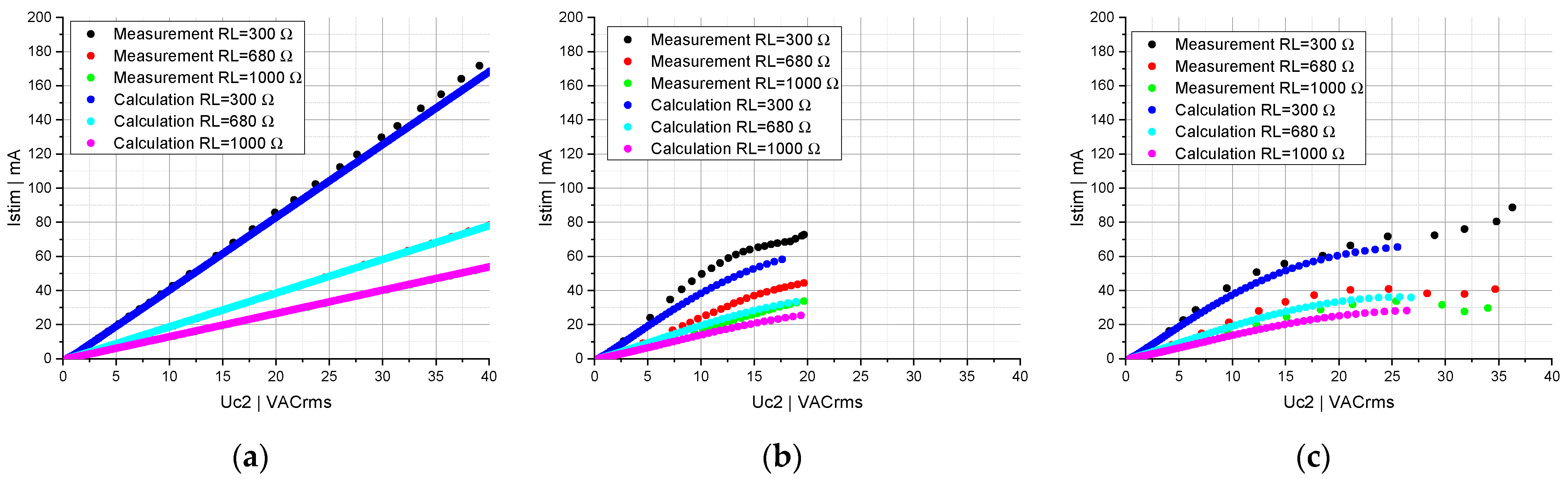
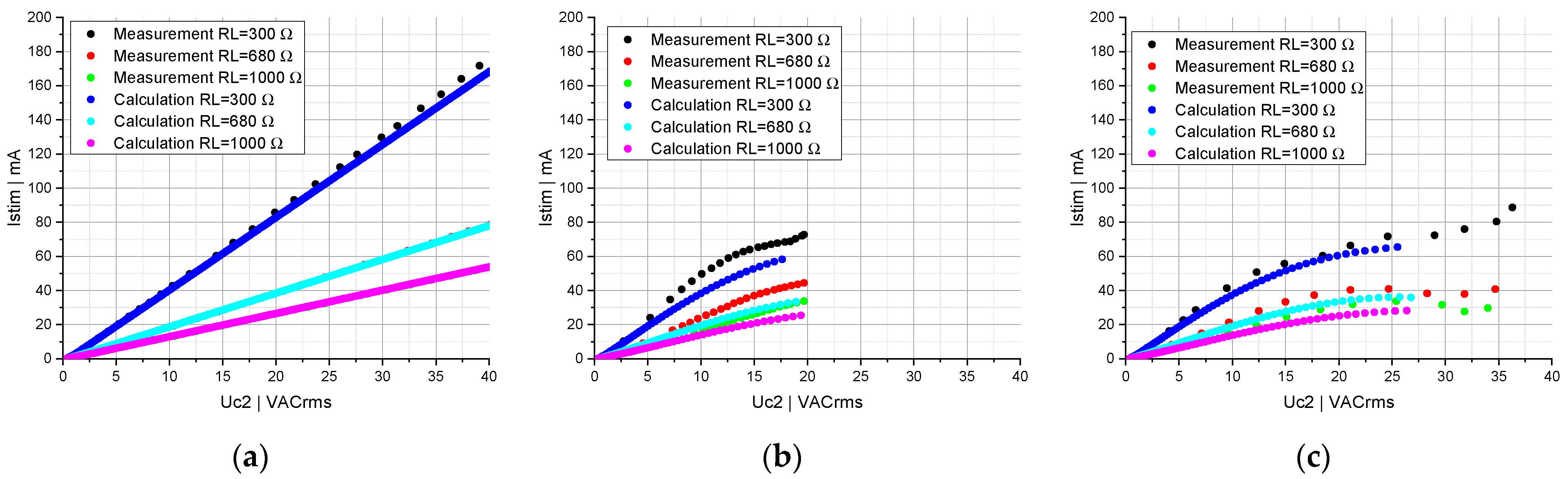
3.1. Circuit Topology Consisting of One Capacitor
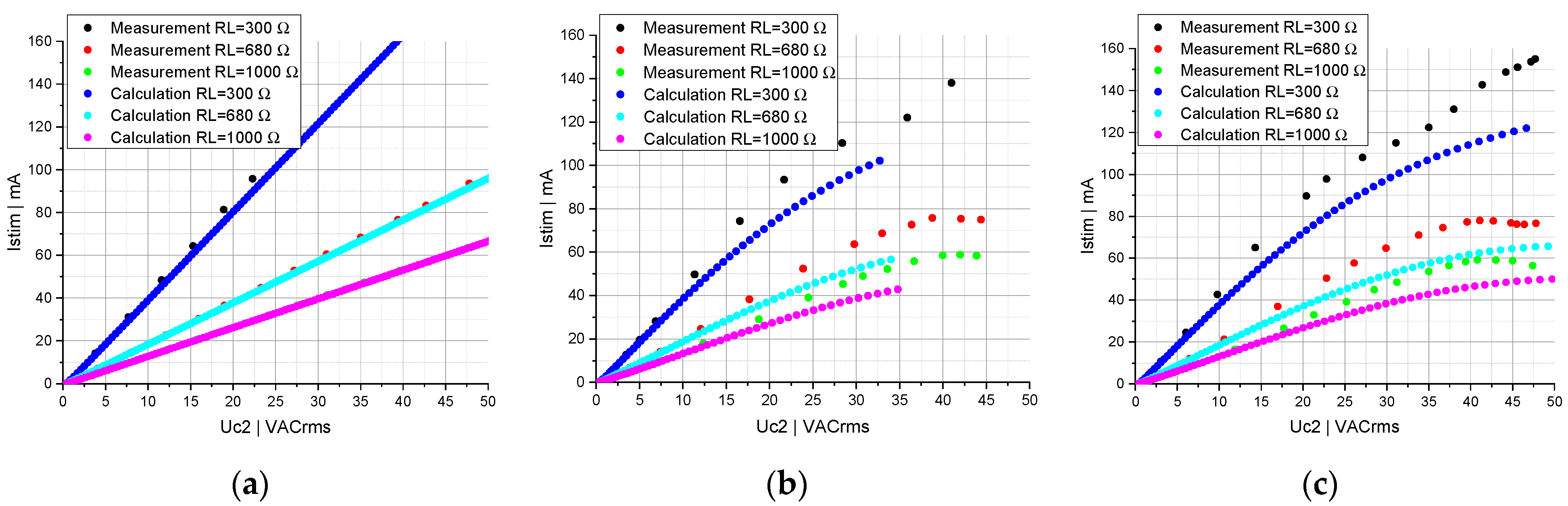
3.2. Circuit Topology Consisting of Two and Four Series-Connected Capacitors
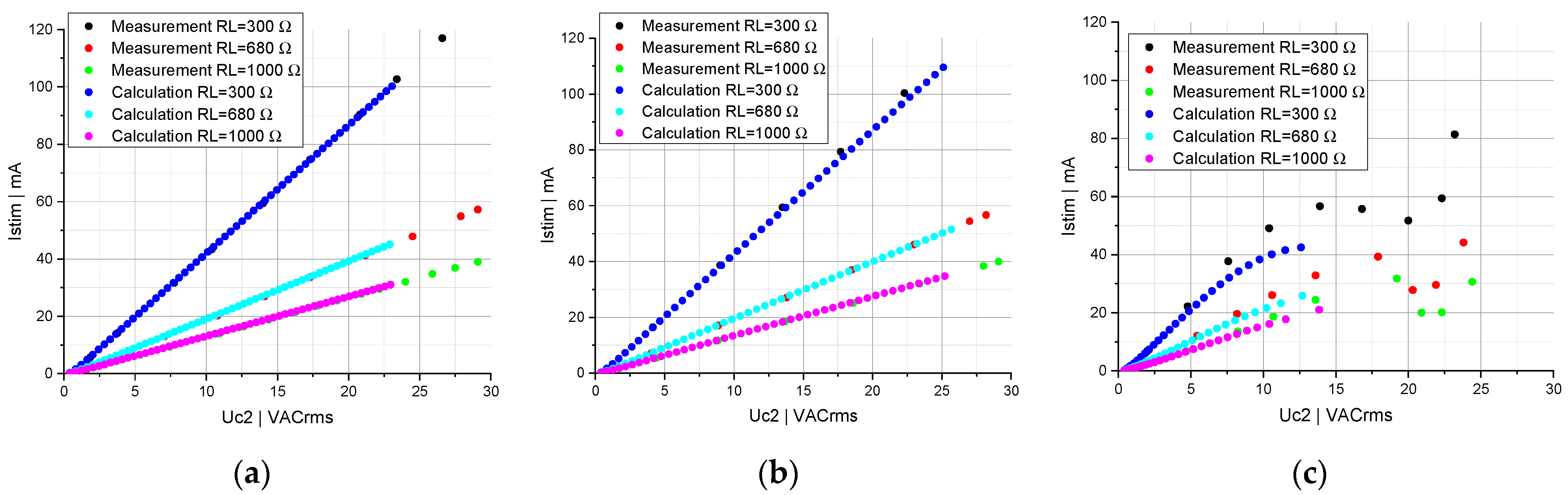
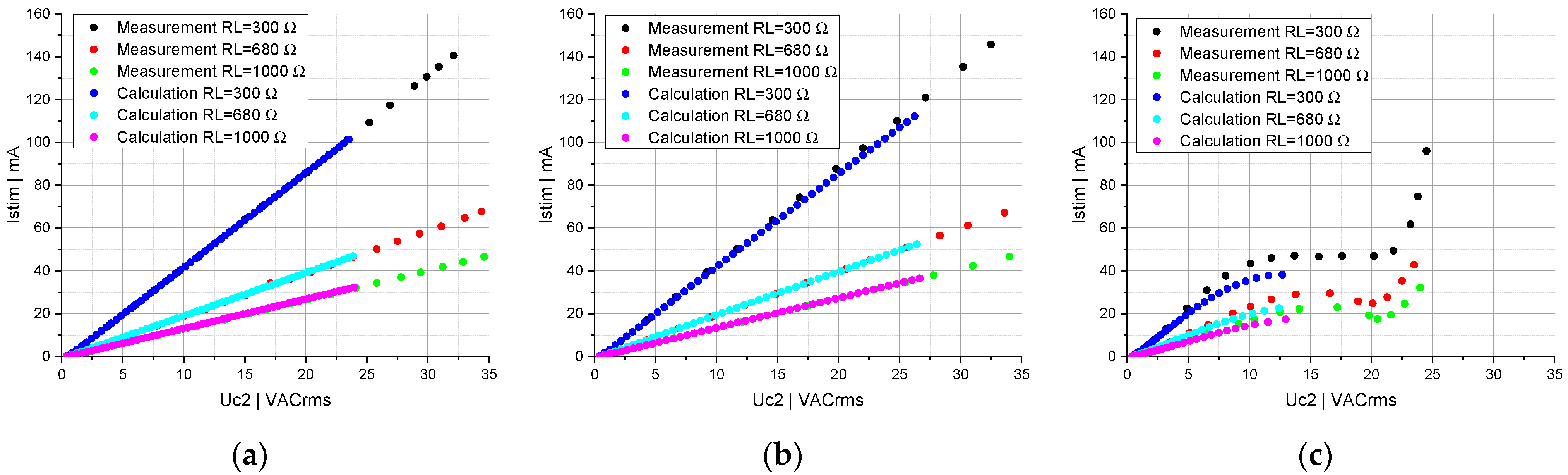
3.3. Circuit Topology Consisting of Two and Four Parallel-Connected Capacitors
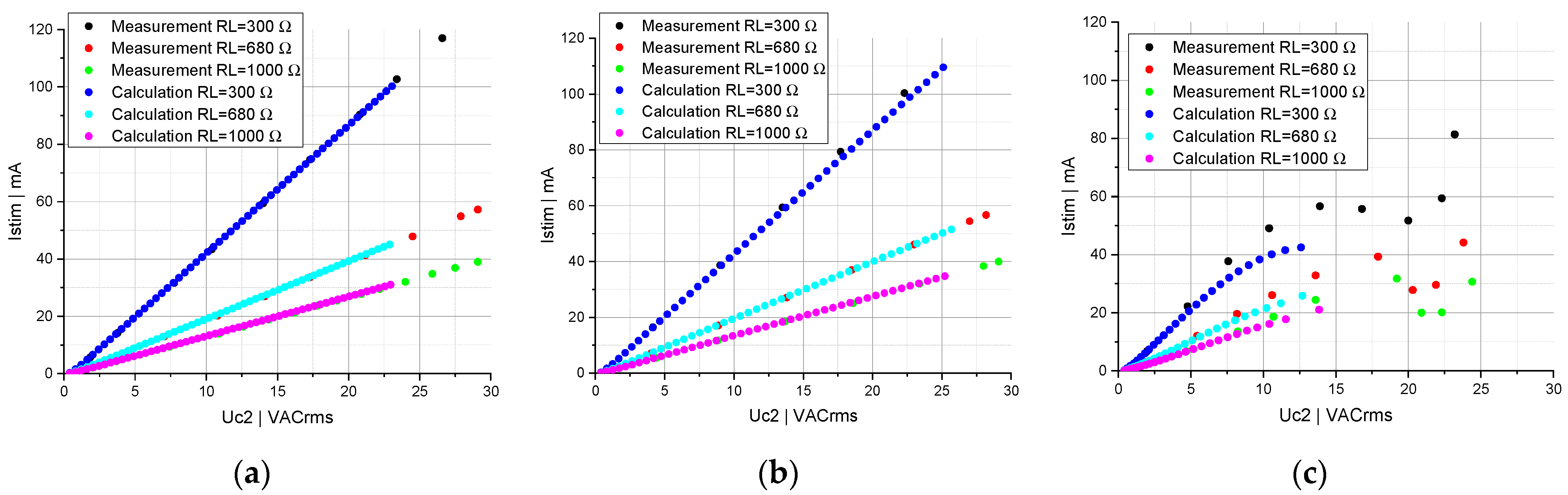
3.4. Circuit Topology Consisting of One Capacitor Connected in Series to Two Parallel-Connected Capacitors
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baptista, P.M.; Costantino, A.; Moffa, A.; Rinaldi, V.; Casale, M. Hypoglossal Nerve Stimulation in the Treatment of Obstructive Sleep Apnea: Patient Selection and New Perspectives. Nat. Sci. Sleep 2020, 12, 151–159. [Google Scholar] [CrossRef] [Green Version]
- Chakravarthy, K.V.; Xing, F.; Bruno, K.; Kent, A.R.; Raza, A.; Hurlemann, R.; Kinfe, T.M. A Review of Spinal and Peripheral Neuromodulation and Neuroinflammation: Lessons Learned Thus Far and Future Prospects of Biotype Development. Neuromodulation 2018, 22, 235–243. [Google Scholar] [CrossRef]
- Eastwood, P.R.; Barnes, M.; Mackay, S.G.; Wheatley, J.R.; Hillman, D.R.; Nguyên, X.-L.; Lewis, R.; Campbell, M.C.; Pételle, B.; Walsh, J.H.; et al. Bilateral hypoglossal nerve stimulation for treatment of adult obstructive sleep apnoea. Eur. Respir. J. 2019, 55, 1901320. [Google Scholar] [CrossRef]
- Hofmeister, M.; Memedovich, A.; Brown, S.; Saini, M.; Dowsett, L.E.; Lorenzetti, D.L.; McCarron, T.L.; MacKean, G.; Clement, F. Effectiveness of Neurostimulation Technologies for the Management of Chronic Pain: A Systematic Review. Neuromodulation 2020, 23, 150–157. [Google Scholar] [CrossRef]
- Moeller, S.; Lücke, C.; Heinen, C.; Bewernick, B.H.; Aydin, M.; Lam, A.P.; Grömer, T.W.; Philipsen, A.; Müller, H.H.O. Vagus Nerve Stimulation As an Adjunctive Neurostimulation Tool in Treatment-resistant Depression. J. Vis. Exp. 2019, e58264. [Google Scholar] [CrossRef] [Green Version]
- Wirth, T.; Laurencin, C.; Berthillier, J.; Brinzeu, A.; Polo, G.; Simon, E.; Mertens, P.; Broussolle, E.; Danaila, T.; Thobois, S. Feasibility of changing for a rechargeable constant current neurostimulator in Parkinson’s disease. Rev. Neurol. 2021, 177, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Díaz-De-Terán, J.; Membrilla, J.A.; Paz-Solís, J.; de Lorenzo, I.; Roa, J.; Lara-Lara, M.; Gil-Martínez, A.; Díez-Tejedor, E. Occipital Nerve Stimulation for Pain Modulation in Drug-Resistant Chronic Cluster Headache. Brain Sci. 2021, 11, 236. [Google Scholar] [CrossRef]
- Ingegnoli, F.; Buoli, M.; Antonucci, F.; Coletto, L.A.; Esposito, C.M.; Caporali, R. The Link Between Autonomic Nervous System and Rheumatoid Arthritis: From Bench to Bedside. Front. Med. 2020, 7, 589079. [Google Scholar] [CrossRef] [PubMed]
- Kaniusas, E.; Szeles, J.C.; Kampusch, S.; Alfageme-Lopez, N.; Yucuma-Conde, D.; Li, X.; Mayol, J.; Neumayer, C.; Papa, M.; Panetsos, F. Non-invasive Auricular Vagus Nerve Stimulation as a Potential Treatment for Covid19-Originated Acute Respiratory Distress Syndrome. Front. Physiol. 2020, 11, 890. [Google Scholar] [CrossRef] [PubMed]
- Sandoval-Munoz, C.P.; Haidar, Z.S. Neuro-Muscular Dentistry: The “diamond” concept of electro-stimulation potential for stomato-gnathic and oro-dental conditions. Head Face Med. 2021, 17, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Paff, M.; Loh, A.; Sarica, C.; Lozano, A.M.; Fasano, A. Update on Current Technologies for Deep Brain Stimulation in Parkinson’s Disease. J. Mov. Disord. 2020, 13, 185–198. [Google Scholar] [CrossRef]
- Kassiri, H.; Tonekaboni, S.; Salam, M.T.; Soltani, N.; Abdelhalim, K.; Velazquez, J.L.P.; Genov, R. Closed-Loop Neurostimulators: A Survey and A Seizure-Predicting Design Example for Intractable Epilepsy Treatment. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 1026–1040. [Google Scholar] [CrossRef] [PubMed]
- Medtronic. Product Performance Report 2019: Summary of Data from the Medtronic Post-Market Registry. 2020. Available online: https://www.medtronic.com/content/dam/medtronic-com/products/product-performance/ppr-reports/2019-product-performance-report-combined.pdf?bypassIM=true (accessed on 23 March 2021).
- Lu, G.; Luo, L.; Liu, M.; Zheng, Z.; Zhang, B.; Chen, X.; Hua, X.; Fan, H.; Mo, G.; Duan, J.; et al. Outcomes and Adverse Effects of Deep Brain Stimulation on the Ventral Intermediate Nucleus in Patients with Essential Tremor. Neural Plast. 2020, 2020, 2486065. [Google Scholar] [CrossRef] [PubMed]
- Sterman, J.; Cunqueiro, A.; Dym, R.J.; Spektor, M.; Lipton, M.L.; Revzin, M.V.; Scheinfeld, M.H. Implantable Electronic Stimulation Devices from Head to Sacrum: Imaging Features and Functions. Radiographics 2019, 39, 1056–1074. [Google Scholar] [CrossRef]
- Neely, R.M.; Piech, D.K.; Santacruz, S.R.; Maharbiz, M.M.; Carmena, J.M. Recent advances in neural dust: Towards a neural interface platform. Curr. Opin. Neurobiol. 2018, 50, 64–71. [Google Scholar] [CrossRef] [PubMed]
- Jang, S.G.; Kim, J.; Lee, J.; Kim, J.S.; Kim, D.H.; Park, S.M. Wireless Power Transfer Based Implantable Neurostimulator. In Proceedings of the 2020 IEEE Wireless Power Transfer Conference (WPTC), Seoul, Korea, 15–19 November 2020; pp. 365–368. [Google Scholar]
- Khalifa, A.; Liu, Y.; Bao, Z.; Etienne-Cummings, R. A Compact Free-Floating Device for Passive Charge-Balanced Neural Stimulation using PEDOT/CNT microelectrodes. In Proceedings of the 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 3375–3378. [Google Scholar] [CrossRef]
- KEMET. C1812C474J5JACTU. Available online: https://connect.kemet.com:7667/gateway/IntelliData-ComponentDocumentation/1.0/download/specsheet/C1812C474J5JACTU (accessed on 15 June 2021).
- Murata. Product Search Data Sheet: GRM022R60G473ME15#. Available online: https://www.murata.com/en-global/api/pdfdownloadapi?cate=luCeramicCapacitorsSMD&partno=GRM022R60G473ME15%23 (accessed on 15 June 2021).
- Kahn, M. Multilayer Ceramic Capacitors Materials and Manufacture. Available online: https://www.avx.com/docs/techinfo/CeramicCapacitors/mlcmat.pdf (accessed on 7 July 2021).
- Pan, M.-J.; Randall, C.A. A brief introduction to ceramic capacitors. IEEE Electr. Insul. Mag. 2010, 26, 44–50. [Google Scholar] [CrossRef]
- Jiang, W.; Hu, Y.; Bao, S.; Lijie, S.; Yuwei, Z.; Cui, Y.; Qiang, L.; Wei, J. Analysis on the causes of decline of MLCC insulation resistance. In Proceedings of the 16th International Conference on Electronic Packaging Technology (ICEPT), Changsha, China, 11–14 August 2015; IEEE: Piscataway, NJ, USA; pp. 1255–1257, ISBN 978-1-4673-7999-1. [Google Scholar]
- Haertling, G.H. Ferroelectric Ceramics: History and Technology. J. Am. Ceram. Soc. 1999, 82, 797–818. [Google Scholar] [CrossRef]
- Setter, N.; Damjanovic, D.; Eng, L.; Fox, G.R.; Gevorgian, S.; Hong, S.; Kingon, A.I.; Kohlstedt, H.; Park, N.Y.; Stephenson, G.B.; et al. Ferroelectric thin films: Review of materials, properties, and applications. J. Appl. Phys. 2006, 100, 051606. [Google Scholar] [CrossRef]
- Borafker, S.; Drujin, M.; Ben-Yaakov, S.S. Voltage-Dependent-Capacitor Control of Wireless Power Transfer (WPT). In Proceedings of the IEEE International Conference on the Science of Electrical Engineering in Israel (ICSEE), Elat, Israe, 12–14 December 2018; IEEE: Piscataway, NJ, USA; pp. 1–4, ISBN 978-1-5386-6378-3. [Google Scholar]
- Olsommer, Y.; Ihmig, F.R. Consistent and Efficient Modeling of the Nonlinear Properties of Ferroelectric Materials in Ceramic Capacitors for Frugal Electronic Implants. Sensors 2020, 20, 4206. [Google Scholar] [CrossRef]
- Olsommer, Y.; Ihmig, F.R.; Müller, C. Modeling the Nonlinear Properties of Ferroelectric Materials in Ceramic Capacitors for the Implementation of Sensor Functionalities in Implantable Electronics. Proceedings 2019, 42, 61. [Google Scholar] [CrossRef] [Green Version]
- TDK Corporation. Delivery Specification: Multilayer Ceramic Chip Capacitor. Available online: https://product.tdk.com/system/files/dam/doc/product/capacitor/ceramic/mlcc/specification/mlccspec_automotive_general_en.pdf (accessed on 15 June 2021).
- Murata. GRM Series: Chip Multilayer Ceramic Capacitors for General Purpose. Available online: https://www.murata.com/products/capacitor/ceramiccapacitor/overview/lineup/smd/grm (accessed on 15 June 2021).
- Murata. Structure and Material of Chip Multilayer Ceramic Capacitor. Available online: https://search.murata.co.jp/Ceramy/image/img/A01X/1R0212B.pdf (accessed on 15 June 2021).
- Jadli, U.; Mohd-Yasin, F.; Moghadam, H.A.; Nicholls, J.R.; Pande, P.; Dimitrijev, S. The Correct Equation for the Current Through Voltage-Dependent Capacitors. IEEE Access 2020, 8, 98038–98043. [Google Scholar] [CrossRef]
- Gourary, M.M.; Rusakov, S.G.; Ulyanov, S.L.; Zharov, M.M.; Rassadin, A.E. SPICE models of nonlinear capacitors for simulation of ferroelectric circuits. In Proceedings of the IEEE East-West Design & Test Symposium (EWDTS), Novi Sad, Serbia, 29 September–2 October 2017; IEEE: Piscataway, NJ, USA; pp. 1–4, ISBN 978-1-5386-3299-4. [Google Scholar]
- Fatoorehchi, H.; Abolghasemi, H.; Zarghami, R. Analytical approximate solutions for a general nonlinear resistor–nonlinear capacitor circuit model. Appl. Math. Model. 2015, 39, 6021–6031. [Google Scholar] [CrossRef]
- Leschhorn, A.; Djoumbou, S.; Kliem, H. Microscopic model of domain wall motion. J. Appl. Phys. 2014, 115, 114106. [Google Scholar] [CrossRef]
- Alessandri, C.; Pandey, P.; Abusleme, A.; Seabaugh, A. Monte Carlo Simulation of Switching Dynamics in Polycrystalline Ferroelectric Capacitors. IEEE Trans. Electron Devices 2019, 66, 3527–3534. [Google Scholar] [CrossRef]
- Maslovskaya, A.; Moroz, L.; Chebotarev, A.; Kovtanyuk, A. Theoretical and numerical analysis of the Landau–Khalatnikov model of ferroelectric hysteresis. Commun. Nonlinear Sci. Numer. Simul. 2021, 93, 105524. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olsommer, Y.; Ihmig, F.R. Experimental Characterization of Ferroelectric Capacitor Circuits for the Realization of Simply Designed Electroceuticals. Electron. Mater. 2021, 2, 299-311. https://doi.org/10.3390/electronicmat2030021
Olsommer Y, Ihmig FR. Experimental Characterization of Ferroelectric Capacitor Circuits for the Realization of Simply Designed Electroceuticals. Electronic Materials. 2021; 2(3):299-311. https://doi.org/10.3390/electronicmat2030021
Chicago/Turabian StyleOlsommer, Yves, and Frank R. Ihmig. 2021. "Experimental Characterization of Ferroelectric Capacitor Circuits for the Realization of Simply Designed Electroceuticals" Electronic Materials 2, no. 3: 299-311. https://doi.org/10.3390/electronicmat2030021
APA StyleOlsommer, Y., & Ihmig, F. R. (2021). Experimental Characterization of Ferroelectric Capacitor Circuits for the Realization of Simply Designed Electroceuticals. Electronic Materials, 2(3), 299-311. https://doi.org/10.3390/electronicmat2030021