
EMB System Design and Clamping Force Tracking Control Research


Abstract
1. Introduction
2. Design and Parameter Selection of Actuator in Electromechanical Braking System
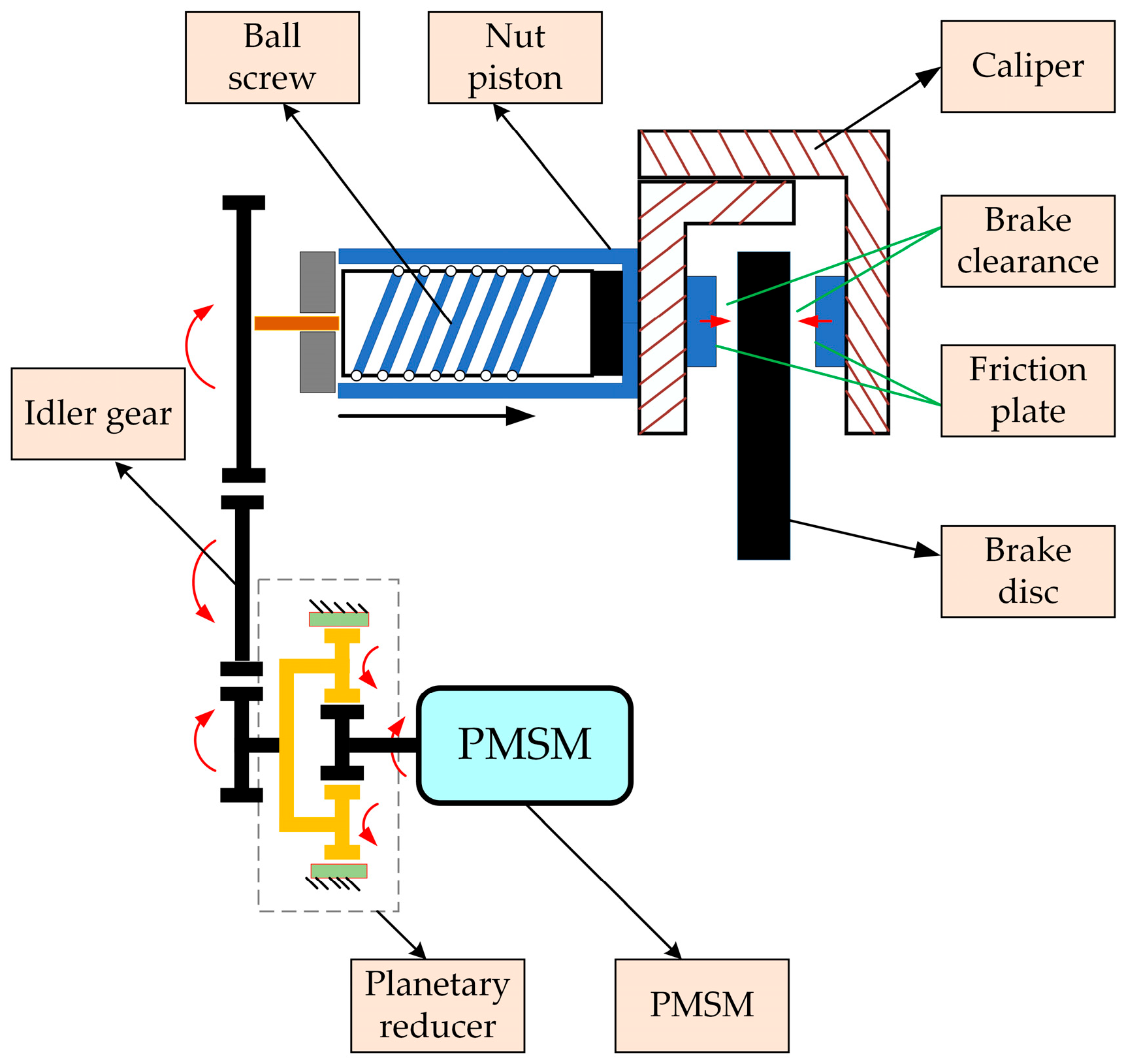
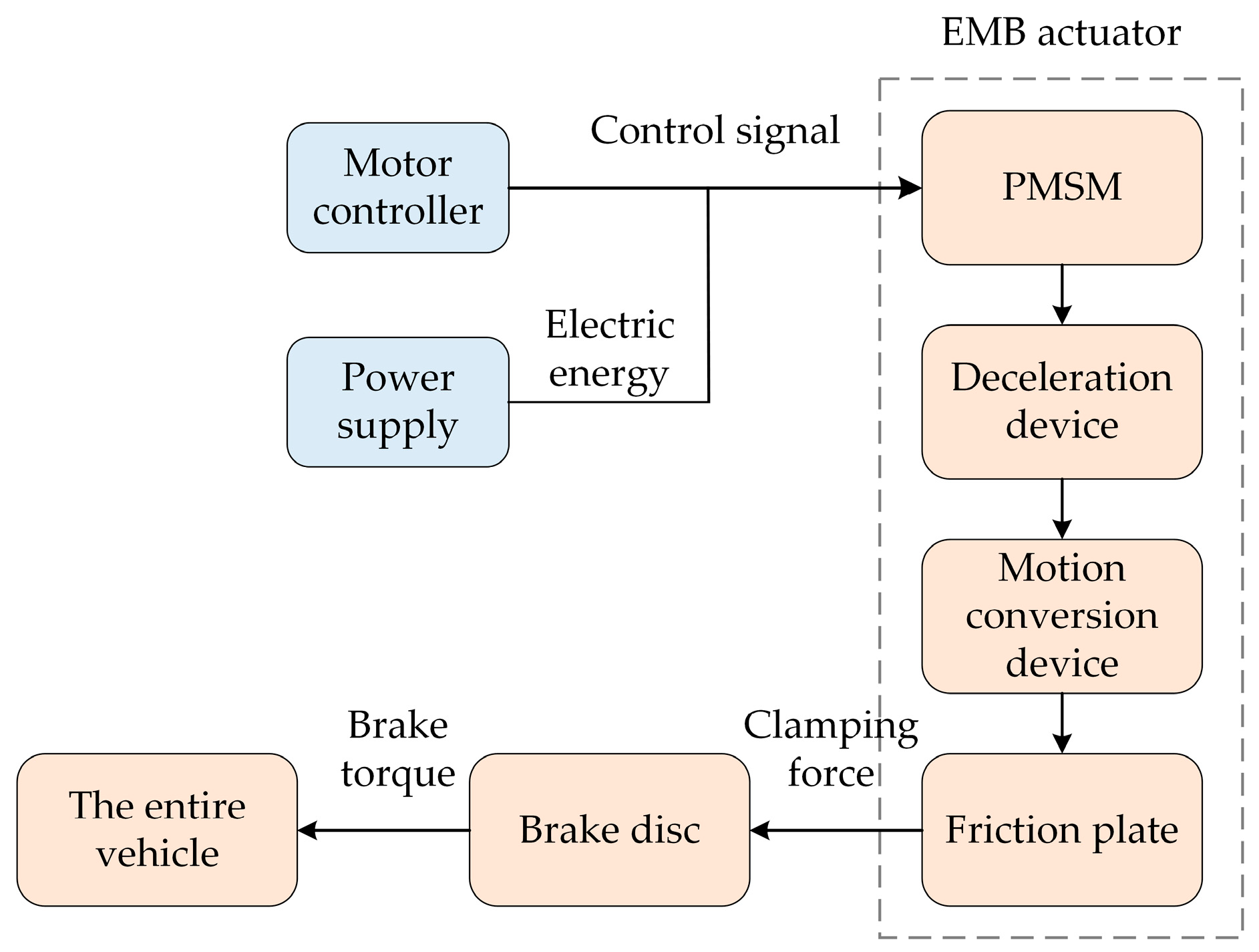
2.1. Composition of the EMB Structure
- (1)
- Clearance Elimination Stage: The motor rotates forward and quickly reaches the set target speed and remains stable, allowing the clearance between the brake disc and the brake friction liner to be eliminated as soon as possible.
- (2)
- Brake Clamping Force Holding Stage: When the brake disc comes into contact with the friction lining, braking force begins to be generated, as detected by the sensor. The measured displacement of the car’s brake pedal and the pedal speed will be used as parameters to obtain the corresponding brake clamping force, which will be input as the target value into the motor controller. Since the pressure sensor is inconvenient and costly to install in the EMB system, the corresponding brake clamping force is simulated through the ball screw displacement signal. At this point, the motor’s output torque will quickly reach the corresponding set value and remain stable, while the motor is in a locked state.
- (3)
- Brake Clearance Reset Stage: When the driver releases the brake pedal, in order to ensure the smooth progress of the next brake, the brake clearance needs to be reset quickly. At this time, the motor controller will control the motor to reverse and restore its brake clearance to the original set value.
2.2. EMB Actuator Design and Check
2.2.1. Brake Performance Verification
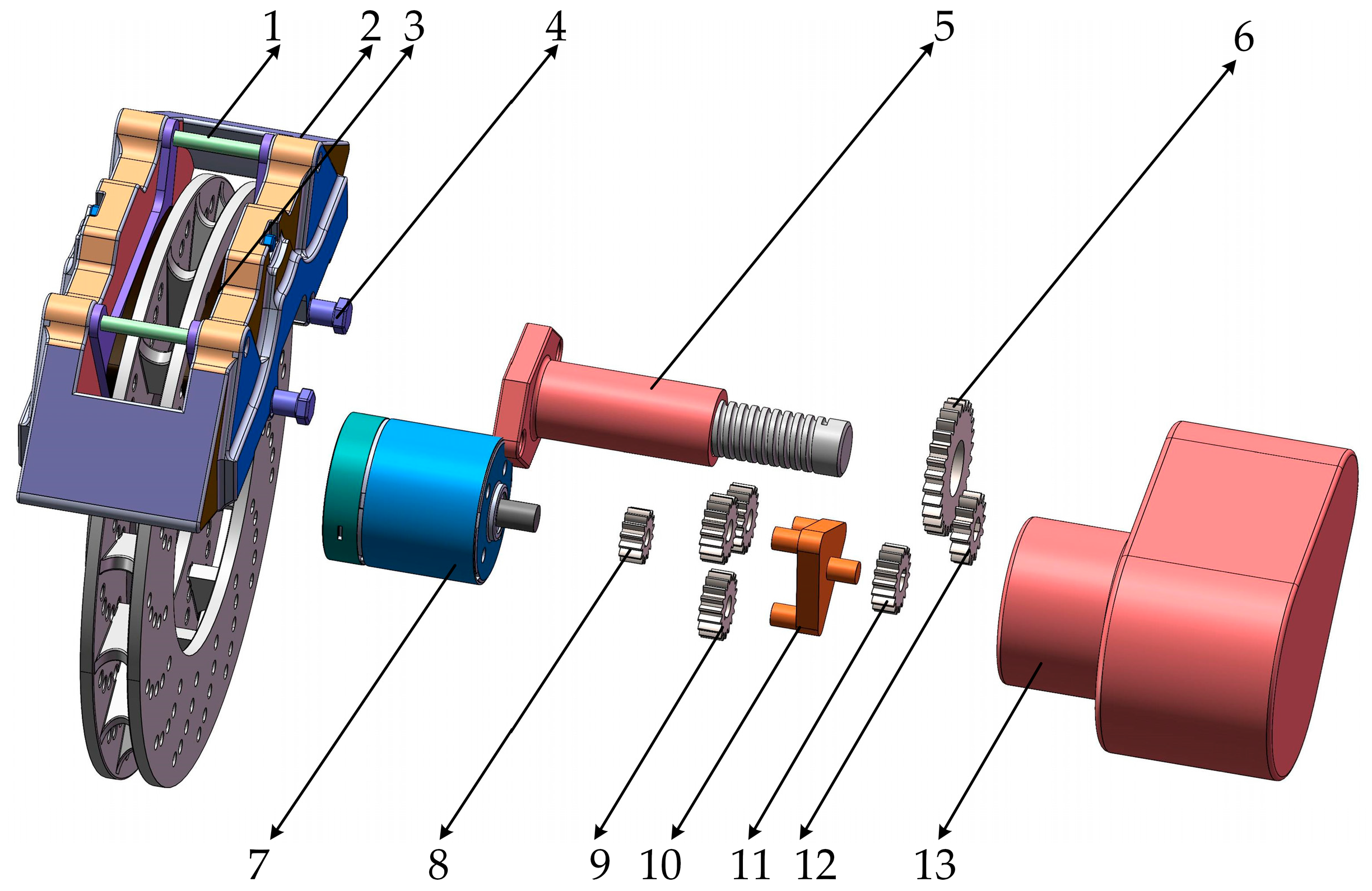
2.2.2. Selection of EMB System Actuator
3. Mathematical Model of the EMB Actuator
3.1. Mathematical Model of Permanent-Magnet Synchronous Motor
- (1)
- Ignore the resistance windings in the motor rotor;
- (2)
- Ignore the eddy current and hysteresis losses inside the motor and assume that the motor core does not saturate;
- (3)
- Assume that the three-phase windings of the motor are symmetrically arranged, with an electrical angle difference of 120° between each phase, and the current in the motor presents an ideal three-phase sinusoidal current [18].
3.2. Transmission Mechanism Model
3.3. Drive Motor Load Model
3.4. Brake Disc Model
4. Design of EMB Segmented Controller
4.1. Controller Design for Braking Clearance Elimination Stage
4.2. Controller Design for Clamping Force Holding Stage
4.3. Stage Judgment and Switching Design
5. EMB Simulation Analysis
5.1. Analysis of Motor Speed and Position Control
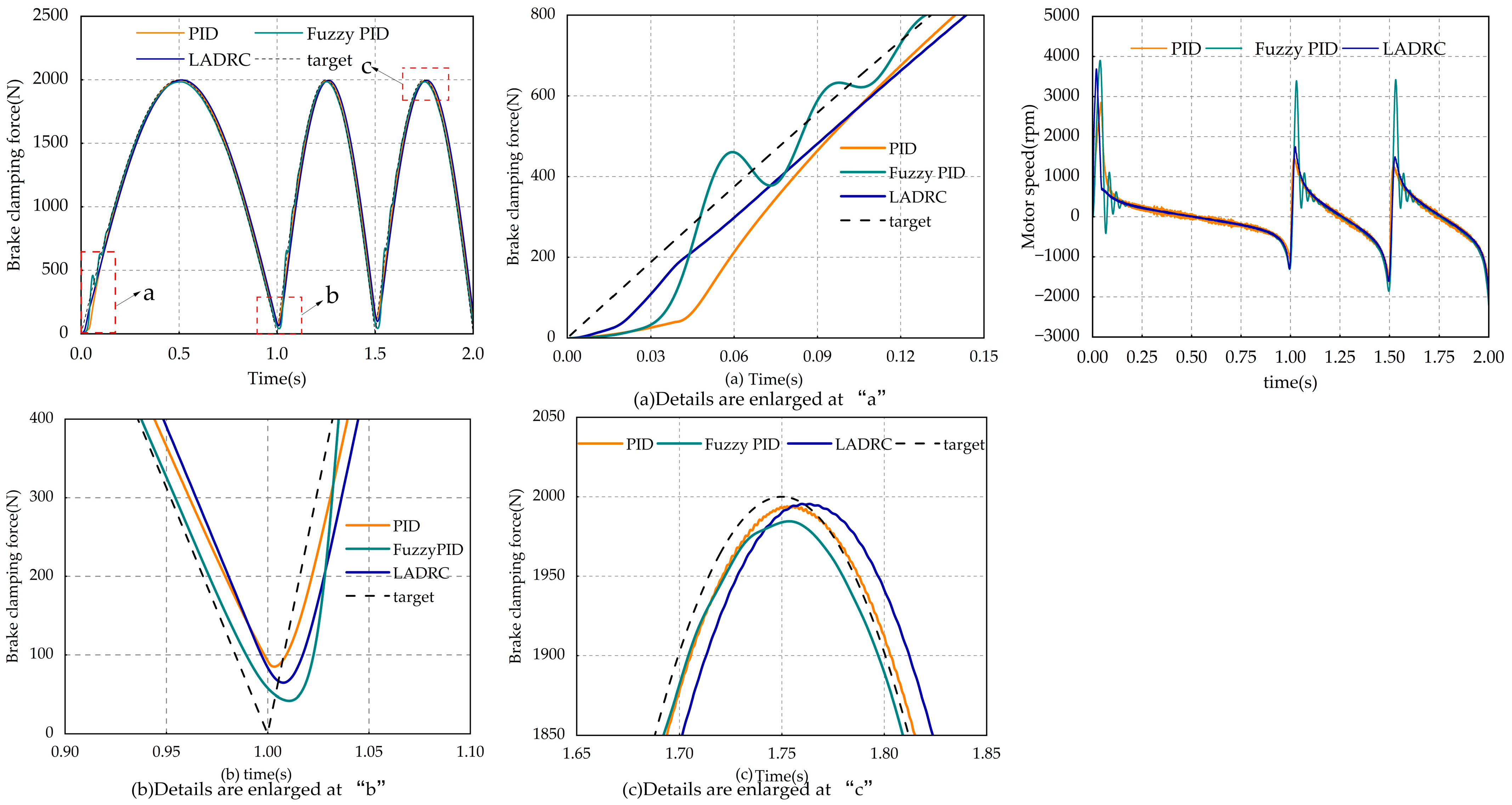
5.2. Force Following Control Analysis
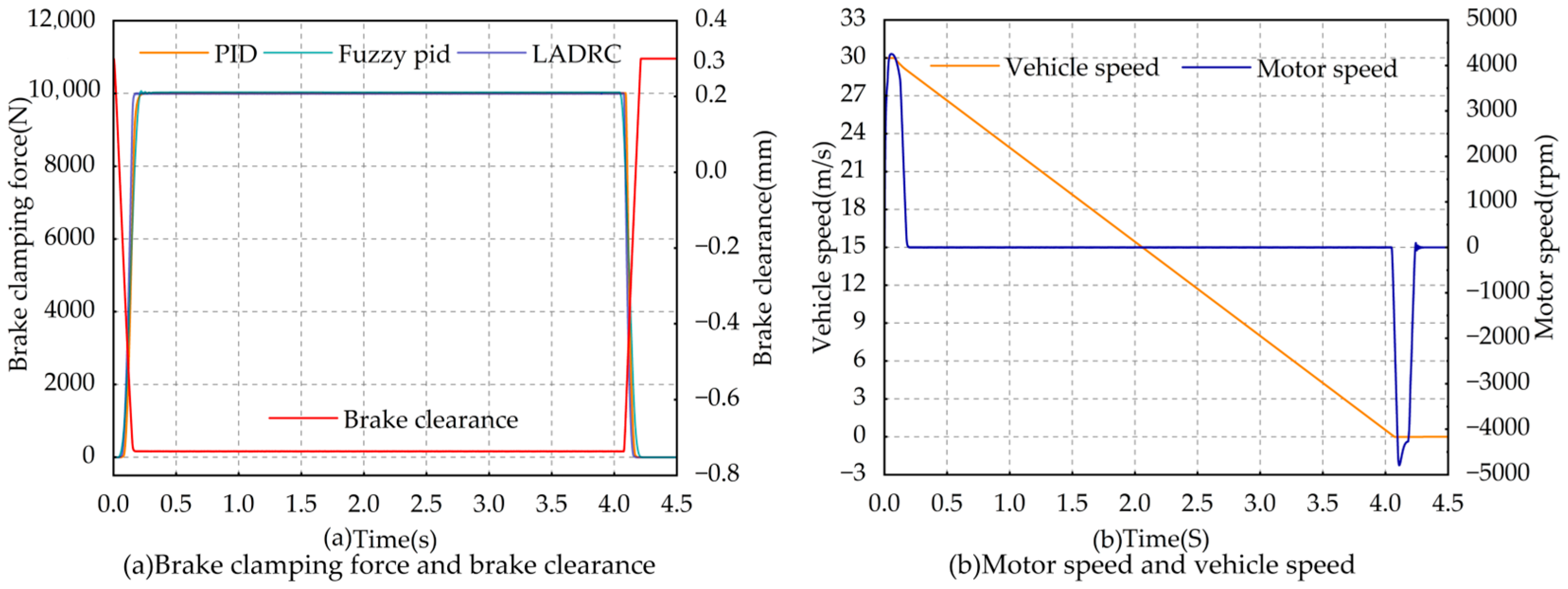
5.3. Analysis of Emergency Braking Conditions
5.4. EMB Hardware-In-the-Loop Test Bench Verification
6. Conclusions
- (1)
- By adopting a layout where the motor and the ball screw are not on the same axis, the length of the traditional coaxial EMB system can be reduced by 30% in the axial distance of the motor. This is more conducive to the layout of the EMB system at the vehicle’s wheel hub. Moreover, through the design of the housing, the PCB board can be integrated into the EMB housing, allowing the basic locking release function of EMB, the ABS function, and the ESP function to be integrated. This can reduce the information transmission time and enhance the active safety performance of the vehicle.
- (2)
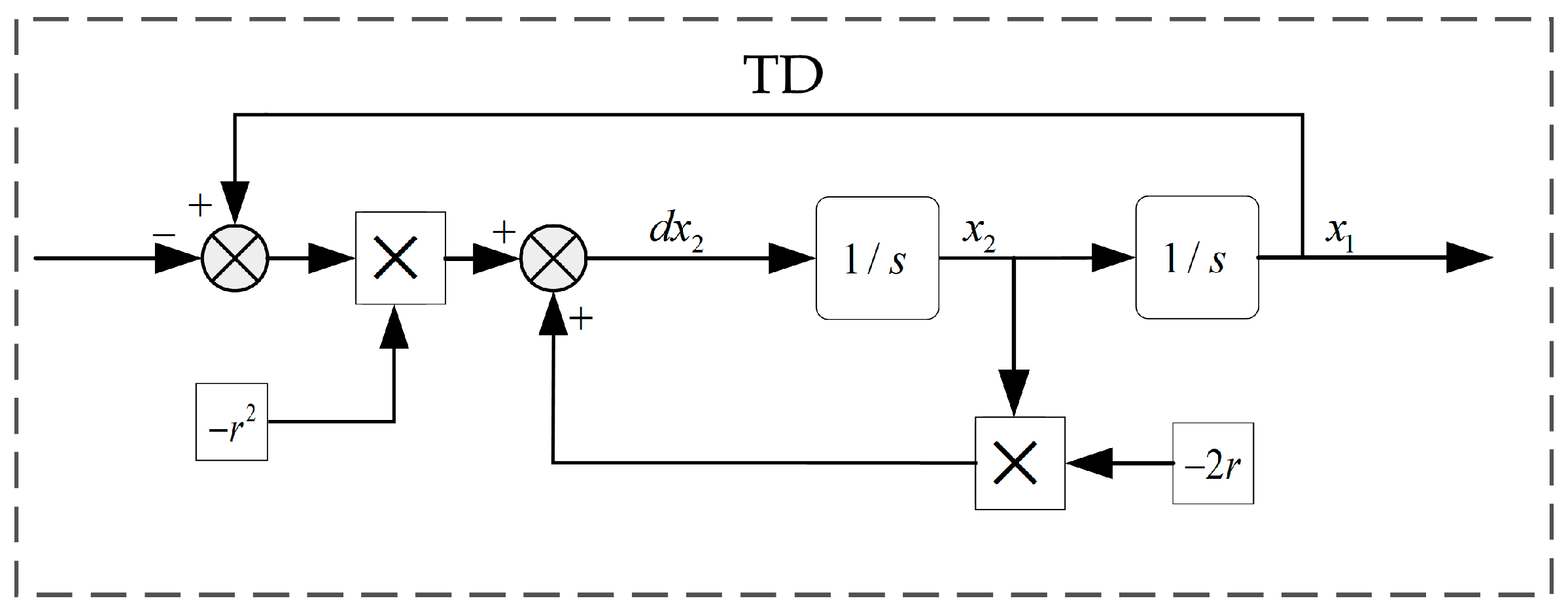
- A feedforward second-order linear active interference suppression control algorithm based on braking clamping force was proposed. Compared with the traditional PID control, its anti-interference ability is improved by approximately 41.2%; in the clamping force tracking control, its overshoot is approximately 9.85% lower than that of the adaptive fuzzy PID control; in terms of the time to reach the steady state, it is approximately 130 ms earlier compared to the other two control algorithms, and at the steady state, the fluctuation is smaller; after optimizing the braking force response, the braking efficiency and stability are improved. Through simulation experiments, the rationality of the segmented control planning was verified. This enables the completion of the braking process and the adaptation of the brake pedal.
- (3)
- Through the EMB hardware-in-the-loop test bench, it can be seen that in terms of the clamping force tracking control, the response delay is only 70 ms, and the overshoot is less than 1%. This is essentially consistent with the simulation test results. It can be seen that the proposed braking clamping force tracking control algorithm is reasonable and effective, and it can improve the braking safety of the vehicle.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Paul, D.; Velenis, E.; Cao, D.; Dobo, T. Optimal μ-estimation-based regenerative braking strategy for an AWD HEV. IEEE Trans. Transport. Electrific. 2017, 3, 249–258. [Google Scholar] [CrossRef]
- Hu, M.; Li, J.; Bian, Y. Distributed Coordinated Brake Control for Longitudinal Collision Avoidance of Multiple Connected Automated Vehicles. IEEE Trans. Intell. Veh. 2022, 8, 2567–2581. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, L.; Wang, H. Adaptive Braking Torque Control for Electronic Mechanical Brake Systems Based on Real-Time Axle Load Observation. IEEE Trans. Intell. Veh. 2023, 4, 567–582. [Google Scholar]
- Bai, F.H.; Zhang, Q.; Guo, J.J. Research on the Control Strategy of Bending Road Braking Force for Electro-mechanical Brake Based on Active Disturbance Rejection Control. Automob. Technol. 2023, 6, 55–62. [Google Scholar]
- Mu, X.D. The Dynamic Control System for Electronic Mechanical Braking Control Strategy Research. Master’s Thesis, Jilin University, Changchun, China, 2021. [Google Scholar]
- Park, G.; Choi, S.; Hyun, D. Clamping force estimation based on hysteresis modeling for electro-mechanical brakes. Int. J. Automot. Technol. 2017, 18, 883–890. [Google Scholar] [CrossRef]
- Wei, Z.; Xu, J.; Halim, D. Clamping force control of Sensor-less Electro-Mechanical brake actuator. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 764–769. [Google Scholar]
- Fu, Y.F.; Hu, X.H.; Wang, W.R. Simulation and Experimental Study of a New Electromechanical Brake with Automatic Wear Adjustment Function. Int. J. Automot. Technol. 2020, 21, 227–238. [Google Scholar] [CrossRef]
- Li, J.; Mengchun, W.; He, R. A design of electromechanical brake system triple-loop controllers using frequency domain method based on Bode plote. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 795–798. [Google Scholar]
- Fox, J.; Roberts, R.; Baier-Welt, C. Modeling and control of a single motor electronic wedge brake. SAE Trans. 2007, 116, 321–331. [Google Scholar]
- Peng, X.; Chen, C.; Zhang, J. Study of the sliding mode control of electromechanical brake systems. Hunan Univ. (Nat. Sci.) 2010, 37, 35–39. [Google Scholar]
- Line, C.; Manzie, C.; Good, M.C. Electromechanical brake modeling and control: From PI to MPC. IEEE Trans. Control Syst. Technol. 2008, 16, 446–457. [Google Scholar] [CrossRef]
- Lee, C.F.; Line, C.M.C. Explicit nonlinear MPC of an automotive electromechanical brake. IFAC Proc. Vol. 2008, 41, 10758–10763. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Wang, Z.; Chen, Y.J. Modeling, Simulation and Experimental Research of Electro-Mechanical Brake. Mech. Electr. Eng. 2023, 40, 485–493. [Google Scholar]
- Wang, Z. Electronic Mechanical Braking System Control Strategy Design and Simulation Study. Master's Thesis, Jiangsu University, Zhenjiang, China, 2023. [Google Scholar]
- GB7258-2017; Technical Specifications for Safety of Power-Driven Vehicles Operating on Roads. China Standard Press: Beijing, China, 2017.
- Huang, Y.J. Selection Calculation and Application of Ball Screw Pair. Metalworking 2011, 19, 46–48. [Google Scholar]
- Yuan, L.; Hu, B.X.; Wei, K. Control Principle of Modern Permanent Magnet Synchronous Motor and MATLAB Simulation; Beihang University Press: Beijing, China, 2016. [Google Scholar]
- Jia, M.F. Research on Control Strategy of Automotive Line Control Actuator. Master's Thesis, Hunan University, Changsha, China, 2018. [Google Scholar]
- Song, Y.D.; Hao, M.J.; Yu, B.W. Electronic mechanical brake phases closed-loop control strategy research. Shandong Univ. Sci. Technol. (Nat. Sci. Ed.) 2024, 38, 1–6. [Google Scholar]
- Liu, Y.G. Research on ABS Control of Automotive Electronic Mechanical Braking System Based on Active Disturbance Rejection Control. Master's Thesis, Jiangsu University, Zhenjiang, China, 2023. [Google Scholar]
- Zhou, Y.Y. Automobile Electronic Mechanical Braking System Control Strategy Research. Master's Thesis, Chang’an university, Xi’An, China, 2022. [Google Scholar]
- Ma, L.Y.; Wang, Y.; Ma, J. Parameter tuning of second-order Linear active disturbance rejection control based on PI parameters. Control Eng. 2024, 31, 1761–1767. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name/Unit | |
|---|---|
| Vehicle full-load mass M/kg | 1600 |
| Wheel rolling radius r/m | 0.314 |
| Effective radius of the brake disc R/m | 0.132 |
| Friction coefficient of brake lining μ | 0.32 |
| Pavement adhesion coefficient φ | 0.86 |
| Gravitational acceleration g/(m/s2) | 9.8 |
| Centroid height h/m | 0.53 |
| The distance between the center of mass and the rear axis b/m | 1.25 |
| Automobile wheelbase L/m | 2.68 |
| Name | Parameter/Unit | Numerical Value |
|---|---|---|
| PMSM | Rated power /w | 200 |
| Rated speed of the motor /rpm | 6000 | |
| Motor locked-rotor torque /Nm | 1.92 | |
| Motor torque coefficient /N·m/A | 0.13 | |
| Rated voltage of the motor /V | 12 | |
| Motor pole logarithm | 4 |
| Name | Parameter/Unit | Numerical Value |
|---|---|---|
| Ball screw | Lead L/mm | 5 |
| Thread elevation angle ° | 15 | |
| Transmission efficiency | 0.97 | |
| Planetary gear reducer | Reduction ratio | 12.96 |
| Moment of inertia J/kg·cm2 | 0.03 | |
| Transmission efficiency | 0.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, J.; Yan, H.; Yan, Y.; Huang, X. EMB System Design and Clamping Force Tracking Control Research. Modelling 2025, 6, 72. https://doi.org/10.3390/modelling6030072
Zou J, Yan H, Yan Y, Huang X. EMB System Design and Clamping Force Tracking Control Research. Modelling. 2025; 6(3):72. https://doi.org/10.3390/modelling6030072
Chicago/Turabian StyleZou, Junyi, Haojun Yan, Yunbing Yan, and Xianping Huang. 2025. "EMB System Design and Clamping Force Tracking Control Research" Modelling 6, no. 3: 72. https://doi.org/10.3390/modelling6030072
APA StyleZou, J., Yan, H., Yan, Y., & Huang, X. (2025). EMB System Design and Clamping Force Tracking Control Research. Modelling, 6(3), 72. https://doi.org/10.3390/modelling6030072