1. Introduction
The global pipeline for floating offshore wind more than tripled in 2020 and as a result new floating technologies are needed as the industry looks to lease sites in deeper waters [
1]. Currently fixed bottom jacket structures or monopiles are used in shallow waters (less than 40 m) and floating offshore wind turbines (FOWTs) with chain catenary mooring systems are used as the water gets deeper (greater than 100 m). In the intermediate water depths of roughly 55–80 m there has not been a clear solution, as fixed bottom structures and floating systems with chain catenary systems both become prohibitively expensive [
2]. As researchers have worked to tackle this problem one potential solution, taut synthetic mooring systems have come to the forefront.
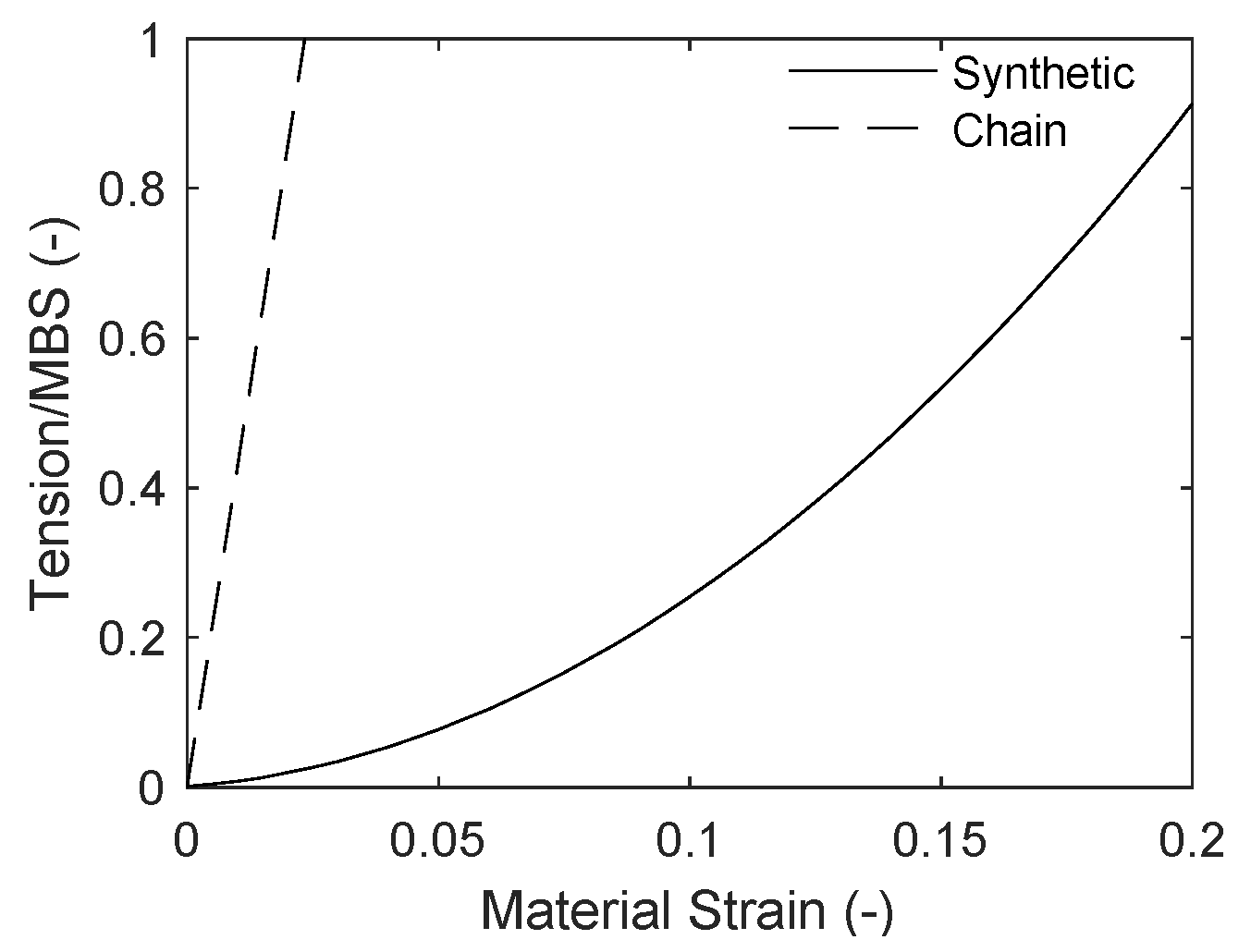
Taut-synthetic systems provide restoring force to the platform by the elastic properties of the rope [
3]. By comparison a chain catenary system provides restoring force through the geometry of the mooring system and the weight of the chain [
4]. For a chain catenary system to be functional in the intermediate depths a large amount of chain needs to be used to provide the necessary restoring force for the platform. For a taut synthetic system, it is somewhat less clear what makes a good design. Larger diameter ropes are stiffer and attract more load, but a larger diameter rope can also handle larger loads. It is also unclear what level of pretension should be used to ensure that the line can handle the loads while also not becoming slack.
Researchers have begun to develop optimization techniques to determine the best mooring systems specific to the floating platform and environmental conditions. Generally optimizing the mooring system to minimize the cost is a priority but determining if a mooring configuration is feasible is challenging. Some researchers have linearized the FOWT system and used a frequency-domain analysis [
5] to estimate the response of the system or used simplified models to determine the maximum vessel responses [
6], but this neglects some of the important physics such as the hull hydrodynamic load nonlinearities and fluid loading on the line. Depending on the type of mooring system, for example a chain catenary system, neglecting these nonlinear loadings can greatly under-predict the tension in the mooring lines [
7].
Another approach that has been attempted is to train a surrogate-model using many time domain simulations [
8,
9,
10]. With this approach potential mooring systems throughout the design space are simulated in the time-domain. These results are then used to build a meta-model or surrogate model where the responses of other designs in the space can be estimated by interpolating between the originally analyzed designs. With this method computational resources need to be set aside at the beginning of the optimization to generate the surrogate model, but after the model is generated, the need for computational resources decreases. Although the appropriate physics are used to generate the meta-model, there is no guarantee that the designs will behave as the meta-model predicts until a physics-based simulation is performed.
Lastly, time-domain simulations can be used for evaluating the performance of the mooring system within the optimization process [
11]. Although this is the most computationally expensive of the approaches, it will lead to the most accurate results. Researchers have also experimented with screening the designs which time-domain simulations are run on to avoid wasting computational time on poor designs [
10,
11].
In this study a new approach is presented which continues to make the time-domain approach more computationally feasible. For this approach a tiered method for evaluating constraints is used to prevent running time domain simulations on undesirable designs. In this process progressively more restrictive constraints are evaluated to determine the effectiveness of a mooring system based on criteria like the platform natural periods which are computationally trivial compared to time-domain simulations used for determining peak mooring line tensions. Only when a design has a fair chance of success is a time domain simulation run to determine the maximum and minimum tensions in the lines. This prevents wasting unnecessary computational time on designs that were destined to fail from the beginning. The tiered constraint approach is applied in this work to optimize a taut synthetic mooring system for a 6-MW FOWT.
2. Implementation of the MOGA
The optimization technique used for this study is a multi-objective genetic algorithm (MOGA) coined the NSGA II which was developed by Deb et al. [
12]. The version used here is identical to that implemented by Goupee et al. [
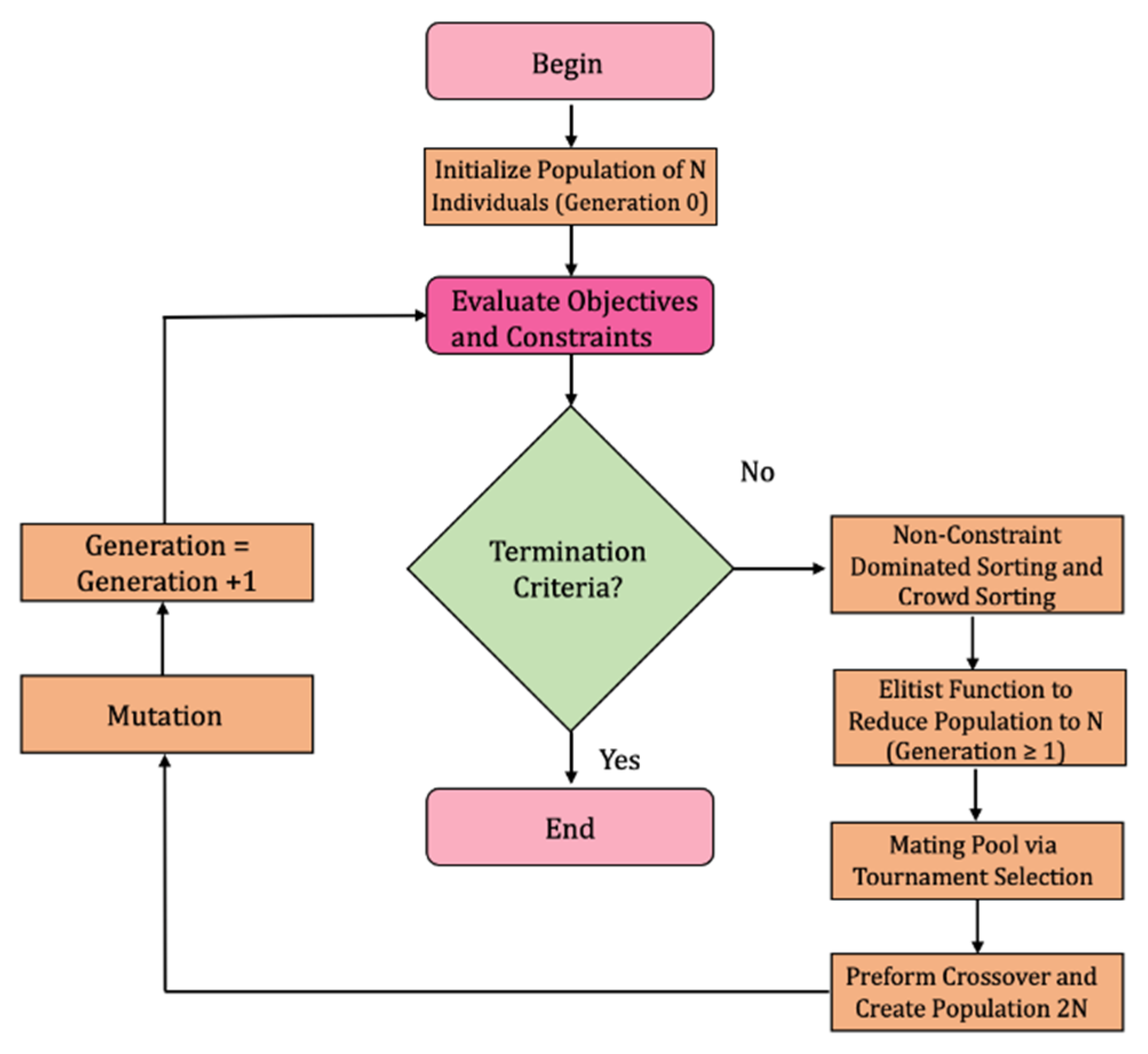
13]. Genetic algorithms use the biological concept of survival of the fittest to find optimal solutions. In the case of multi-objective optimization there is not one optimal design, but instead a front of Pareto-optimal designs where one objective value cannot be made better without worsening another. The role of the NSGA II algorithm is to find many solutions on this Pareto front.
The algorithm starts by initializing a random population of individuals which represent potential solutions. These individuals have several genes which represent the various design variables. The random population is then evaluated to determine values for the multiple objectives, and if there are any constraint violations. First designs are evaluated based on the constraint violation. A member of the population with a smaller constraint value is said to be constraint dominated which encourages the optimizer to select parents that have small or zero constraint values. Next, the optimizer will prioritize designs that are non-dominated meaning the other solutions only have one objective value that is better than it while being worse in the other values. Finally, the NSGA II algorithm aims to encourage formation of the Pareto front by first favoring the non-dominated individuals and secondly favoring individuals which have a larger distance between the solutions.
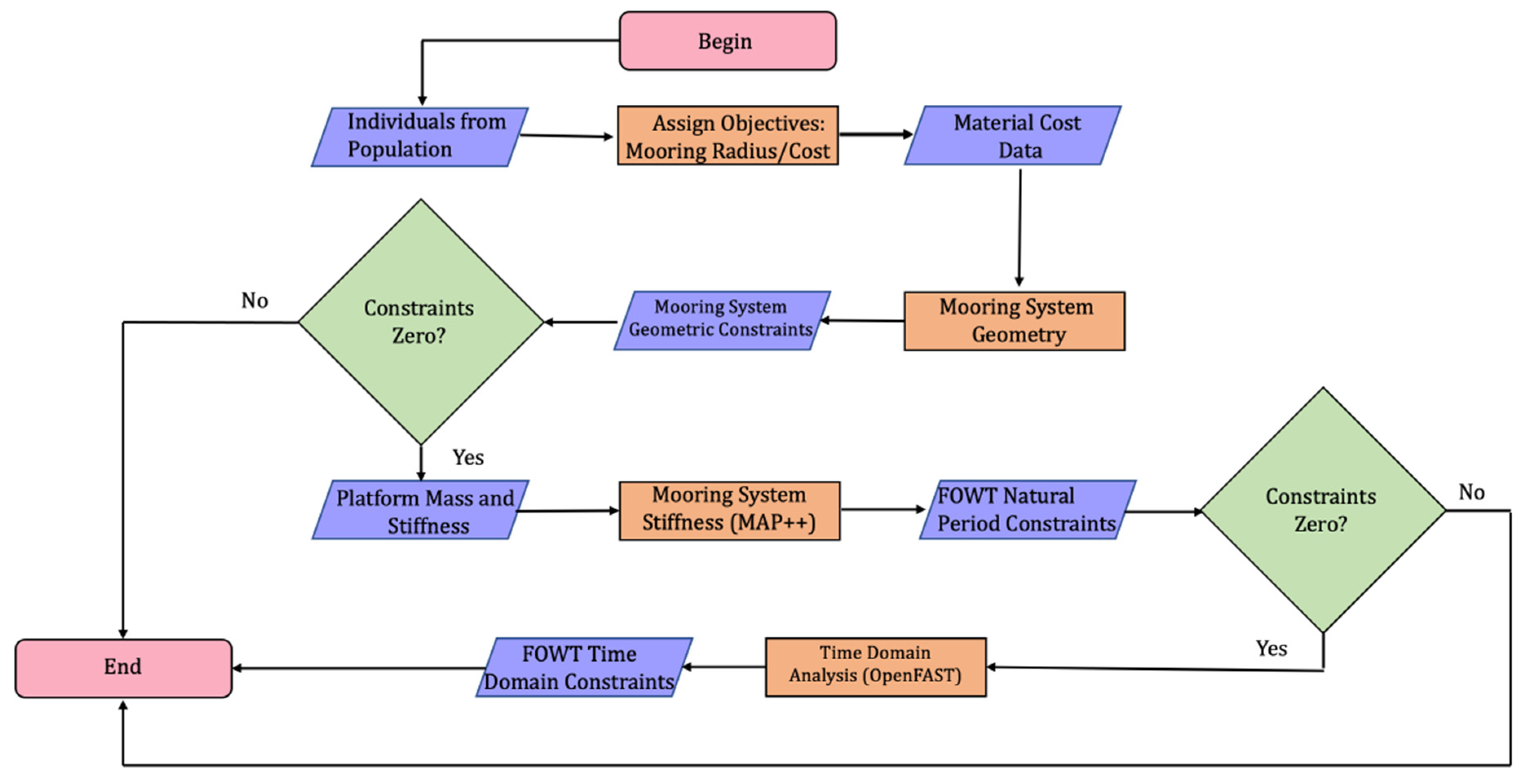
After the individuals have been ranked and sorted, they are placed into a mating pool. Members of the population that have zero constraint values, are non-dominated and possess larger crowding distances are more likely to make it into the mating pool. From this pool individuals will be selected, and reproduction will occur to create new solutions called children. Reproduction consists of crossover between the individual genes, or design variables, along with occasional gene mutations. The children created then have their objective values determined, and the constraints are evaluated. This process is repeated for a set number of generations specified by the user until a Pareto-optimal front is reached. An overview of the NSGA II is shown in
Figure 1.
In general, an optimization problem is expressed as finding a solution which will minimize various objective functions, while simultaneously passing constraints. Mathematically this is represented in Equation (1):
where:
is the vector of design variables;
is the number of design variables;
are the objective functions to be minimized;
is the number of objective functions;
are the constraint violations;
is the number of inequality constraints the optimization problem is subject to.
For this problem the solution vector of design variables will include important characteristics of a mooring system for a FOWT from which other properties will be derived. The vector of design variables of interest for this problem is provided in Equation (2):
where:
is the mooring system radius as measured from the platform centerline;
is the length of the synthetic line (expressed as a fraction of );
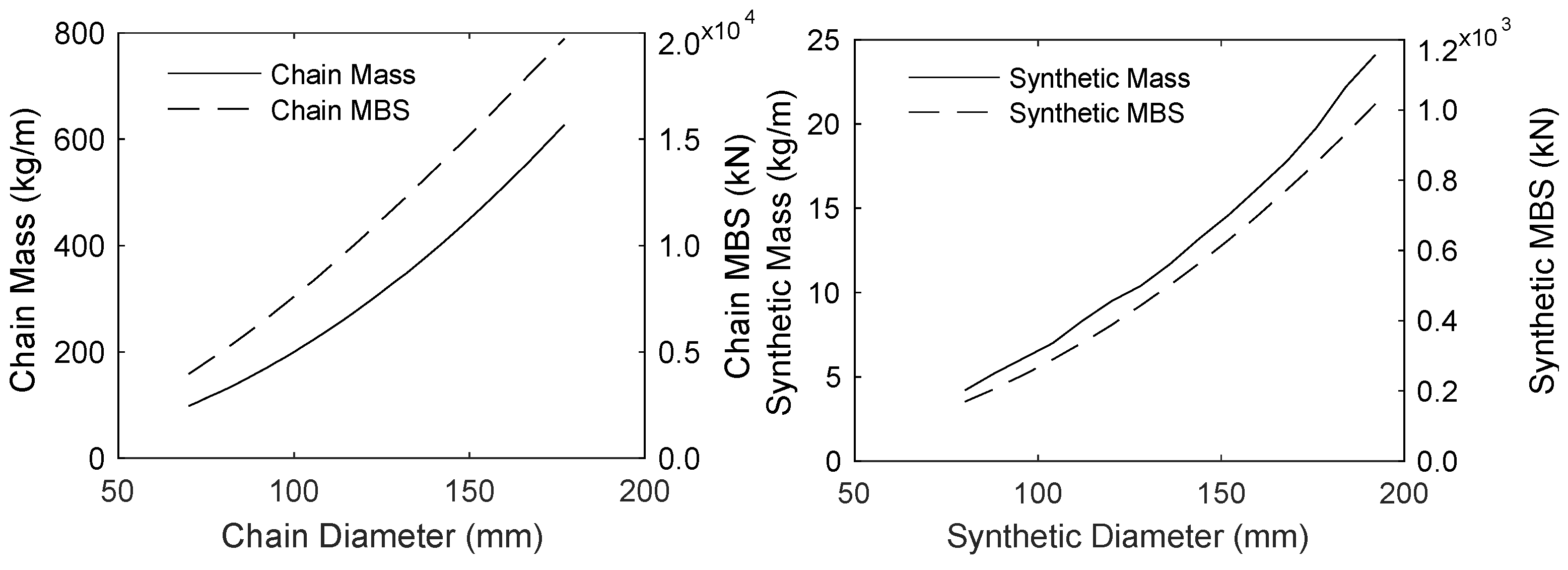
is the diameter of the synthetic line;
is the chain diameter.
This optimization problem will feature two objective functions that are of importance for a FOWT mooring system, cost and mooring radius. Reducing cost for any renewable energy application is of utmost importance to ensure that the technology is economically feasible. In addition, it is crucial to try and minimize the radius, and by extension footprint, of the FOWT to minimize environmental impacts and impacts on other ocean uses such as fishing. For a multi-objective optimization routine to work successfully it is important to ensure that the two objectives are competing. At first glance it would seem as though these objectives are not competing as smaller mooring radii have smaller corresponding line lengths which will be less expensive. However, there are two trends that cause larger mooring radii to ultimately be cheaper for taut systems based on initial designs that were generated [
14]. First, for a taut mooring system as the mooring radius increases the line length will also increase effectively reducing the stiffness of the mooring system for the same line stiffness (EA). This softer system will lead to the mooring system attracting less loads which will ultimately require a smaller diameter line. Second, as the mooring system radius increases the line becomes more horizontal which makes it better able to resist platform motions. Mathematically, the multi-objective minimization problem is stated in Equation (3):
where:
is the mooring system radius;
is the mooring system component cost;
is the mooring system geometric constraint violation;
is the platform heave natural period constraint;
is the platform pitch natural period constraint;
is the maximum chain tension constraint;
is the maximum synthetic tension constraint;
is the minimum synthetic tension constraint.
The constraints for this optimization problem ensure that the mooring system being analyzed is a valid solution. Many of these constraints are based on the ABS/IEC guidelines for designing and simulating floating offshore wind turbines, but time-domain simulations are very computationally expensive. To avoid running time-domain simulations, if possible, a tiered constraint system has been implemented where simpler and more computationally efficient constraints are used to screen potential designs. If the simple constraints are not met this indicates that the design would not be worth analyzing in the time domain. At a high level the constraints and their order from simple to complex are as follows:
- (1)
A geometric feasibility constraint is implemented to avoid analyzing designs where the line lengths for a certain mooring radius yield nonsensical designs (i.e., ).
- (2)
Next, the FOWT platform periods are estimated so that designs which do meet minimum natural period requirements and would likely have resonance issues due to the wave loading are not analyzed (i.e., ).
- (3)
Designs which pass the aforementioned constraints are subjected to DLC 6.1 simulations to determine the maximum and minimum loads in the mooring system and assess constraints requiring these values (i.e., ).
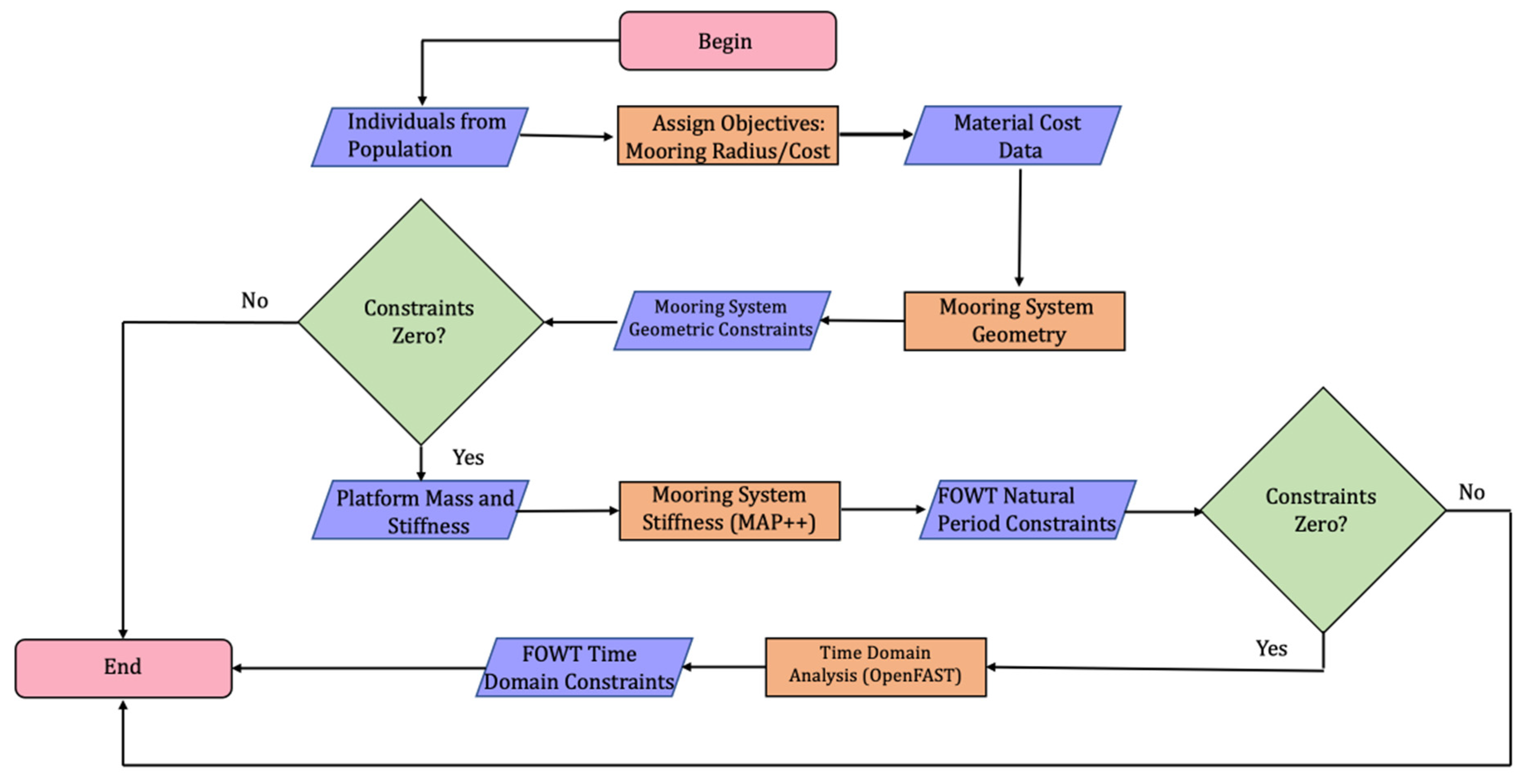
The various constraints are posed in such a way that failing earlier on in the screening process leads to larger constraint violations, thus encouraging the optimizer to favor designs that make it further into the screening process. A flow chart illustrating how the objective functions and constraints are calculated is provided in
Figure 2. The mathematical specifics of the constraints are discussed in the subsequent text.
The first constraint considered in
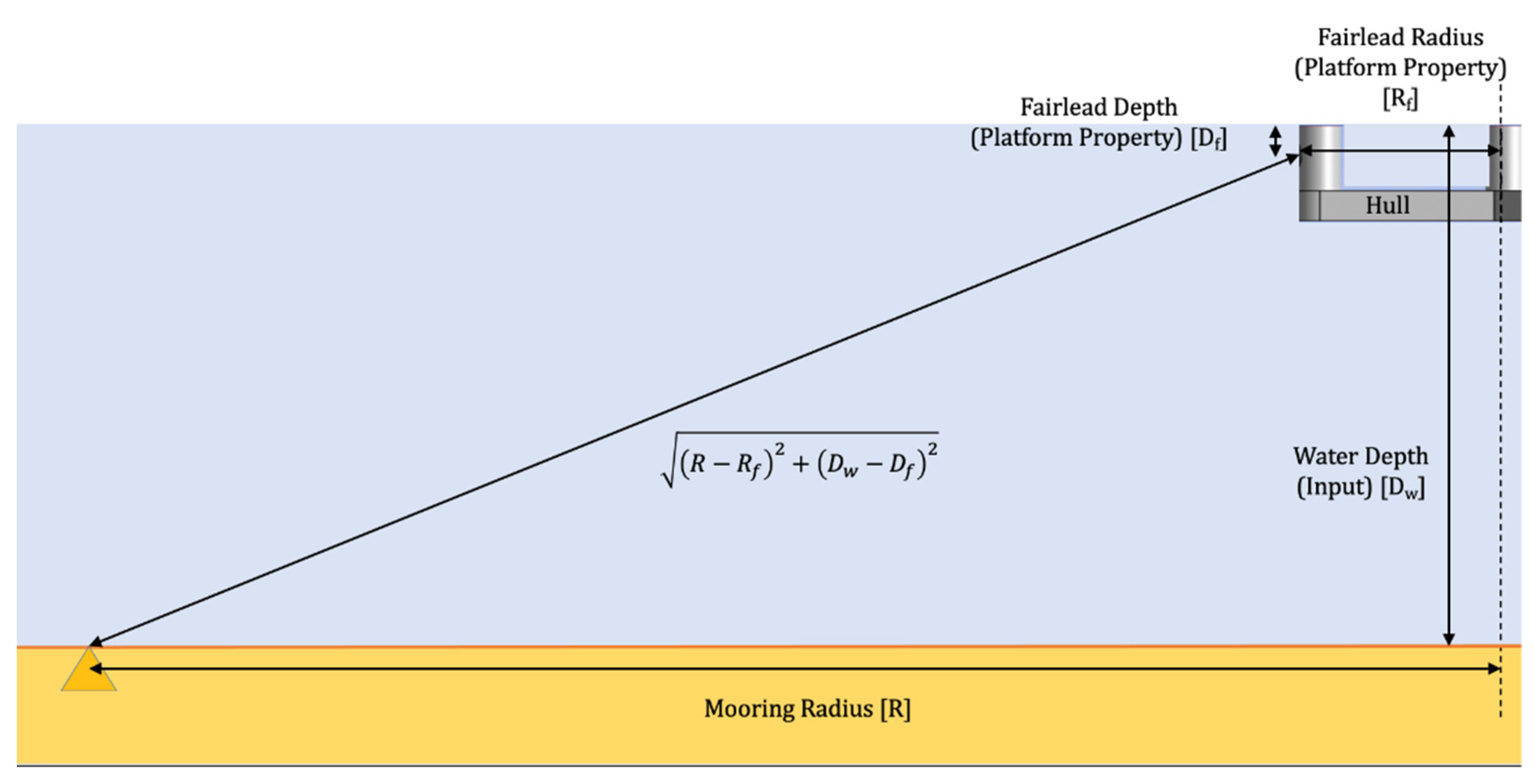
Figure 2 is whether the mooring system is geometrically feasible. There are two obvious scenarios where the mooring system would be geometrically infeasible and lead to constraint violations. The first is the situation where there is no horizontal component to the reaction in the line. A line that goes directly from the fairlead connection point vertically to the seafloor will not provide a restoring force so any line length that is greater than the sum of the distance from the fairlead depth to the seafloor and the fairlead radius to the anchor radius will be considered an invalid solution and penalized accordingly. Similarly, there is a maximum level of prestrain in a synthetic line for which the dynamics of the turbine will not be handled. Generally, it would not be feasible to have a line which has a prestrain more than roughly 10%. As such, line length less than approximately 90% of the straight-line distance between the fairlead and anchor connections are also subject to a large constraint violation. Depending on the synthetic materials used for analysis this percentage could change. For example, an extremely stiff synthetic material such as Dyneema would only be feasible for a much lower prestrain. The mooring system schematic illustrating the mooring system and platform geometry needed to determine if a design meets this geometric feasibility constraint is illustrated in
Figure 3.
For the constraints to guide the optimizer towards feasible solutions they must be carefully constructed. The minimum line length geometric constraint is provided in Equations (4) and (5). The constraint violation is crafted in such a way that a line that is just barely infeasible, such as a line prestrain of 11%, will have a smaller constraint violation than more egregious designs which will yield larger constraint violations. In this way the design variable vector will be guided towards feasible solutions. The maximum line length geometric constraint is constructed in a very similar way to ensure that the optimizer is guided towards good designs. If the mooring system fails these initial constraints, it will not be worth evaluating the more computationally expensive constraints, and these poor designs will be screened out immediately.
where:
is the distance from the center of the platform to the fairlead connection point;
is water depth;
is the depth from the mean water line (MWL) to the fairlead connection point;
is the total line length.
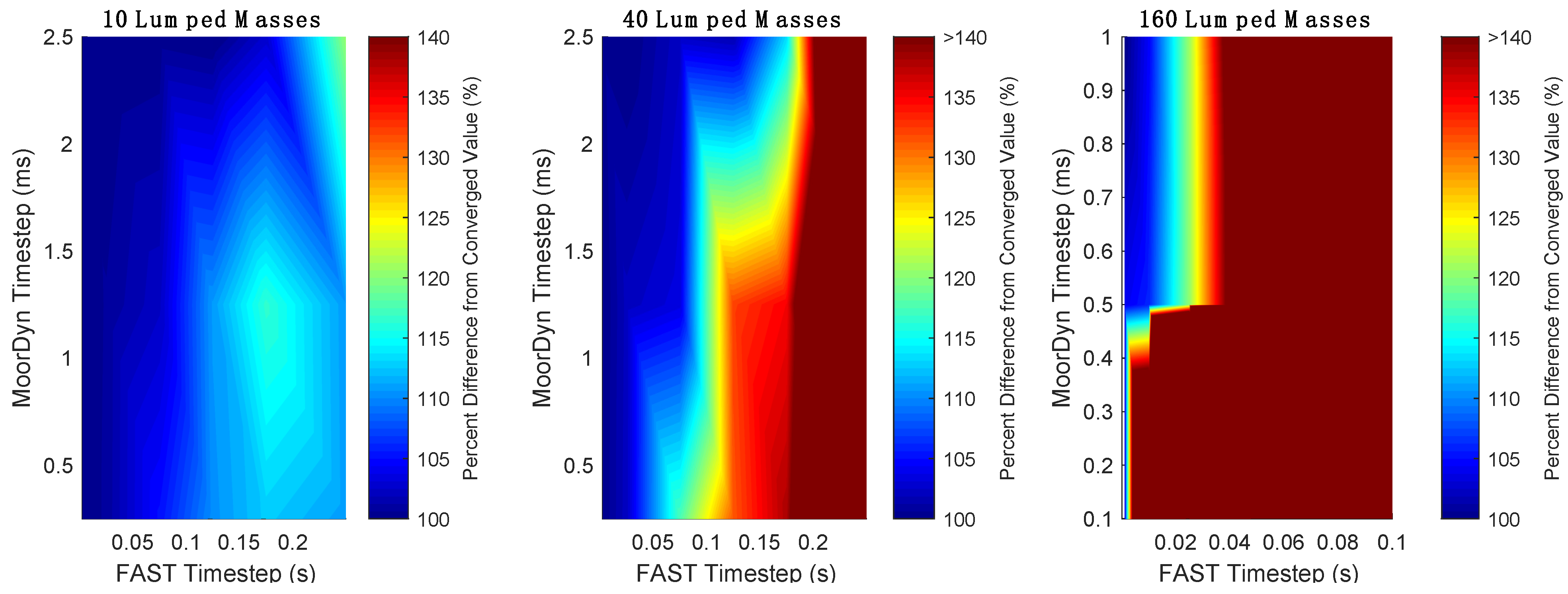
The next constraints to check are the rigid-body natural periods of the platform. If the heave and pitch natural periods of the platform are too close to typical periods of ocean waves it is more likely that the platform motion will experience resonance increasing loads throughout the FOWT, and thus, the mooring system design would be unsatisfactory. To calculate the natural periods for heave and pitch as shown in Equations (6) and (7), the stiffnesses due to the hydrostatic restoring force and mooring system stiffness as well as the mass/inertia and added mass/inertia properties of the platform are needed. All the quantities except the mooring system stiffness are from the turbine and tower masses and locations as well as the platform mass and dimensions. The mooring system stiffness is determined using Mooring Analysis Program (MAP++).
MAP++ [
15] is a quasi-static catenary line solver which is more computationally efficient then a lumped mass model such as MoorDyn [
16] which will be used for the time domain simulations. It can be used within OpenFAST [
17] to model a mooring system or can be called on its own to determine properties like the 6 × 6 mooring system stiffness matrix. The one downside to MAP++ is that it only allows linear elastic materials in the mooring system. As a result, it is important to estimate the stiffness of the synthetic segment of the mooring line at the corresponding installed strain. This approach will lead to a mooring system that has the right stiffness characteristics about the undisplaced position of the FOWT which is sufficient for computing natural frequencies.
As with the geometric constraints the constraint values have been carefully crafted to return smaller values for natural periods that are closer to the specified values in order to drive the vector of design variables towards a feasible solution. The total constraint violation for the natural periods will be the sum of the constraint violations calculated in Equations (6) and (7).
where:
is the platform heave stiffness;
is the mooring system heave stiffness;
is the mass of the platform;
is the infinite period added mass of the platform in heave;
is the platform heave natural period.
where:
is the platform pitch stiffness;
is the mooring system pitch stiffness;
is the platform pitch inertia;
is the infinite period added inertia of the platform in pitch;
is the platform pitch natural period.
If the previous constraints are not violated by the mooring system a time-domain simulation is run in OpenFAST to check the tensions in the lines due to ultimate loading. This includes checking the tension both at the chain fairlead and in the synthetic section to ensure that the line tension is below the line MBS with the appropriate ABS/IEC factors of safety, as well as ensuring that the tension in the synthetic section does not go slack. The constraint violations for the tension in the chain leader are given by Equation (8) and the constraint violation for the maximum tension in the synthetic segment is given by Equation (9). The last of the constraints to be checked is the minimum synthetic tension requirement given in Equation (10).
where:
is the maximum tension at the fairlead;
is chain fatigue factor;
is the minimum breaking strength of the chain.
where:
is the maximum tension at the fairlead;
is the ABS synthetic factor of safety for a synthetic;
is the minimum breaking strength of the synthetic.
where:
is the minimum tension at the fairlead;
is the minimum allowable line tension to avoid slack lines as a percentage of MBS.
The last part of the constraint violations that is worth discussing is the constant added to the geometric and natural period constraint violations. These are crafted to guide the optimizer toward more suitable solutions. In this case a design which fails the geometric constraint will automatically be larger than any designs that fail the natural period constraint or the time-domain constraints. As designs that fail the geometric constraints will be especially poor designs this will guide the optimizer towards solutions that are at least evaluated for the natural periods and/or in the time domain. Similarly, a design which fails one of the natural period constraints will always be larger than a design which makes it through to the time domain simulations. This ensured that the optimizer always favors designs that made it further in the process which helps the optimizer find feasible solutions while also avoiding computationally taxing time domain simulations of poor designs.
5. MOGA Mooring Optimization Results
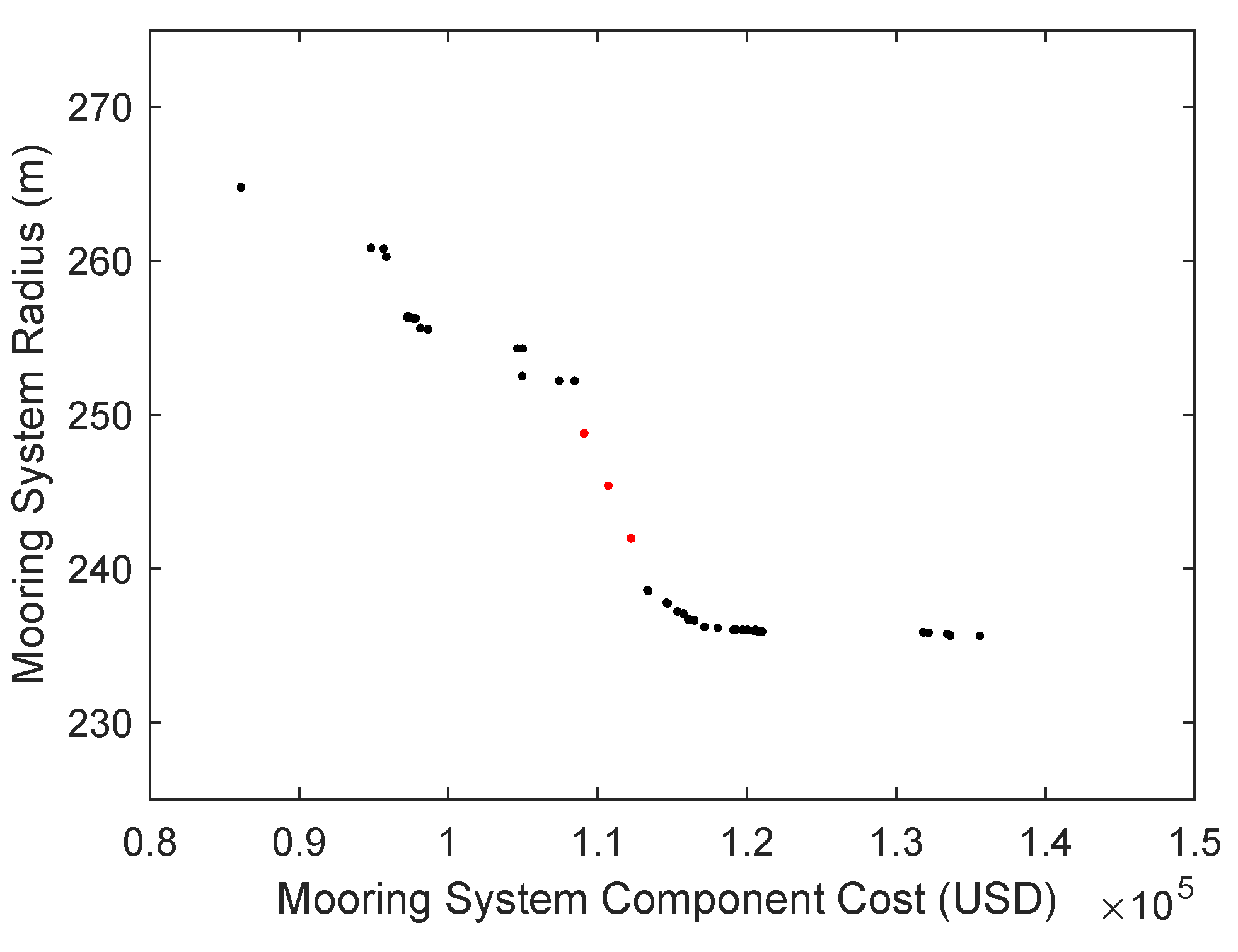
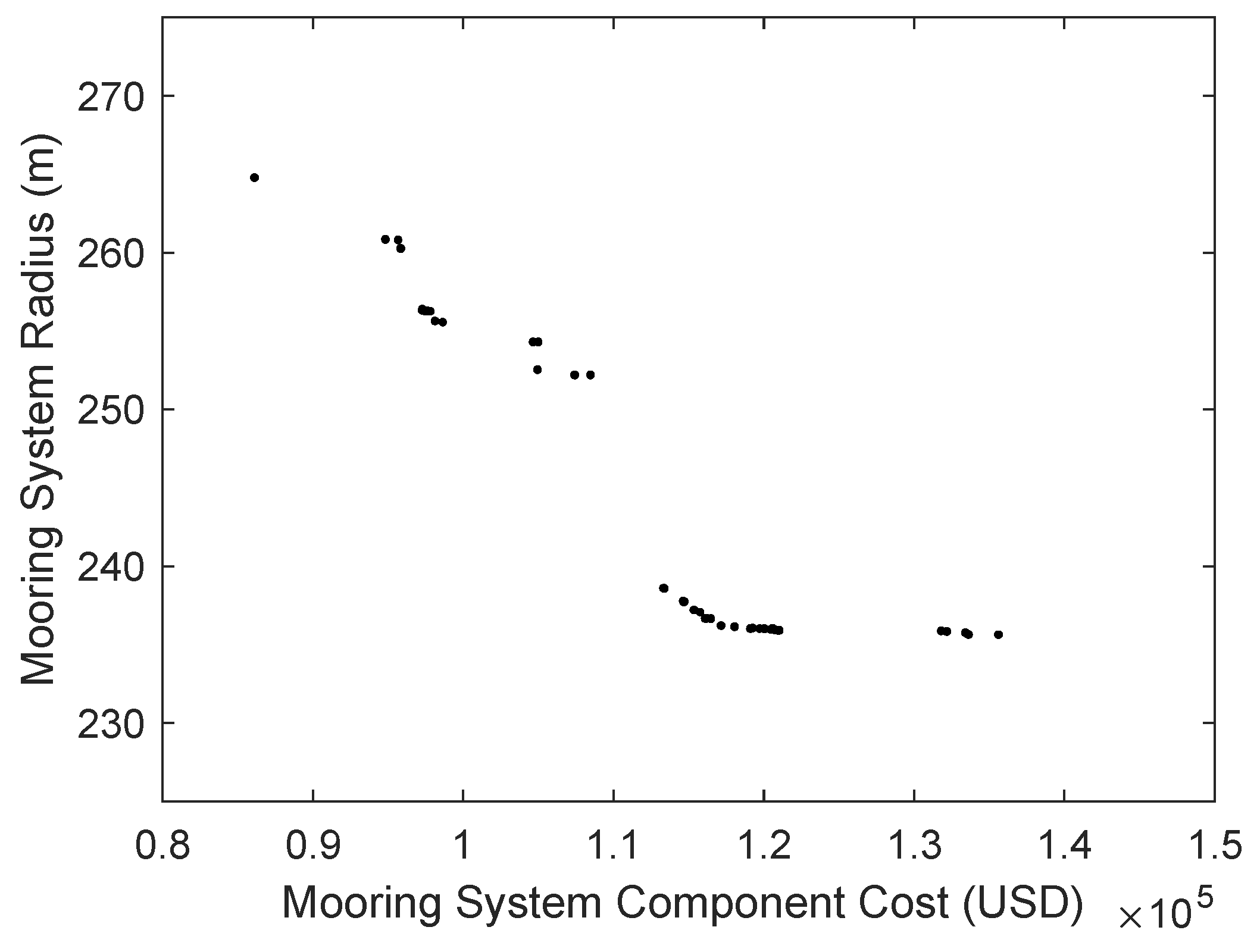
Using the optimization procedure outlined a mooring system was optimized for the VolturnUS 6-MW system provided. The aim of the optimization was to find feasible designs that passed the ABS 6.1 50-year wind and wave loading by using the constraint screening method and computational improvements outlined in this paper. The optimum designs in terms of mooring radius and mooring line component cost generated by the MOGA are shown in
Figure 10. These designs were generated with a population of 180 individuals that were run for a total of 200 generations, and even with the performance enhancements implemented, the algorithm took ~7 days to run. The Pareto front shows that to have a FOWT with a smaller mooring radius a larger capital investment must be made in the mooring system. The cheapest design along this front has a component cost of approximately 86,000 USD and has a radius of about 265 m. As the radius of the mooring system is decreased the cost increases in a somewhat linear fashion to a design which has a cost of 108,000 USD and corresponding radius of about 252 m. At this point there is a jump in the Pareto front until a design which has a radius of 239 m and a cost of 113,000 dollars. After this jump in the Pareto front, mooring system radius can be reduced in radius slightly to about 235 m, but this 4 m reduction comes at a large increase in price.
The optimization performed started with 180 randomly generated individuals of which there were no restrictions on the initial seeding in the population. The constraint values were determined through the tiered-constraint method presented which was designed to both avoid running time domain simulations on infeasible designs, and to guide the optimizer towards feasible designs. This optimization was run several times with similar results observed including the jump in the Pareto front.
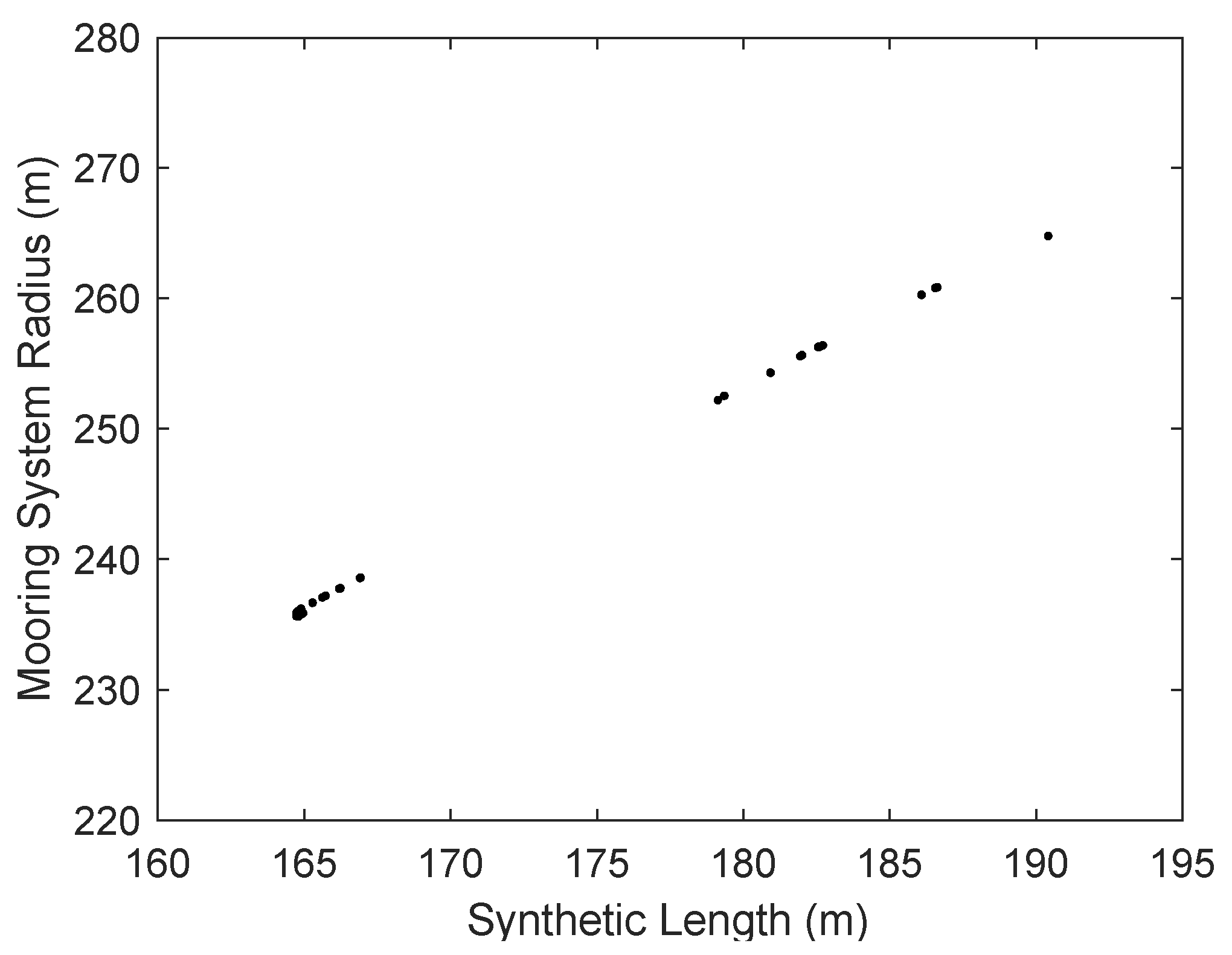
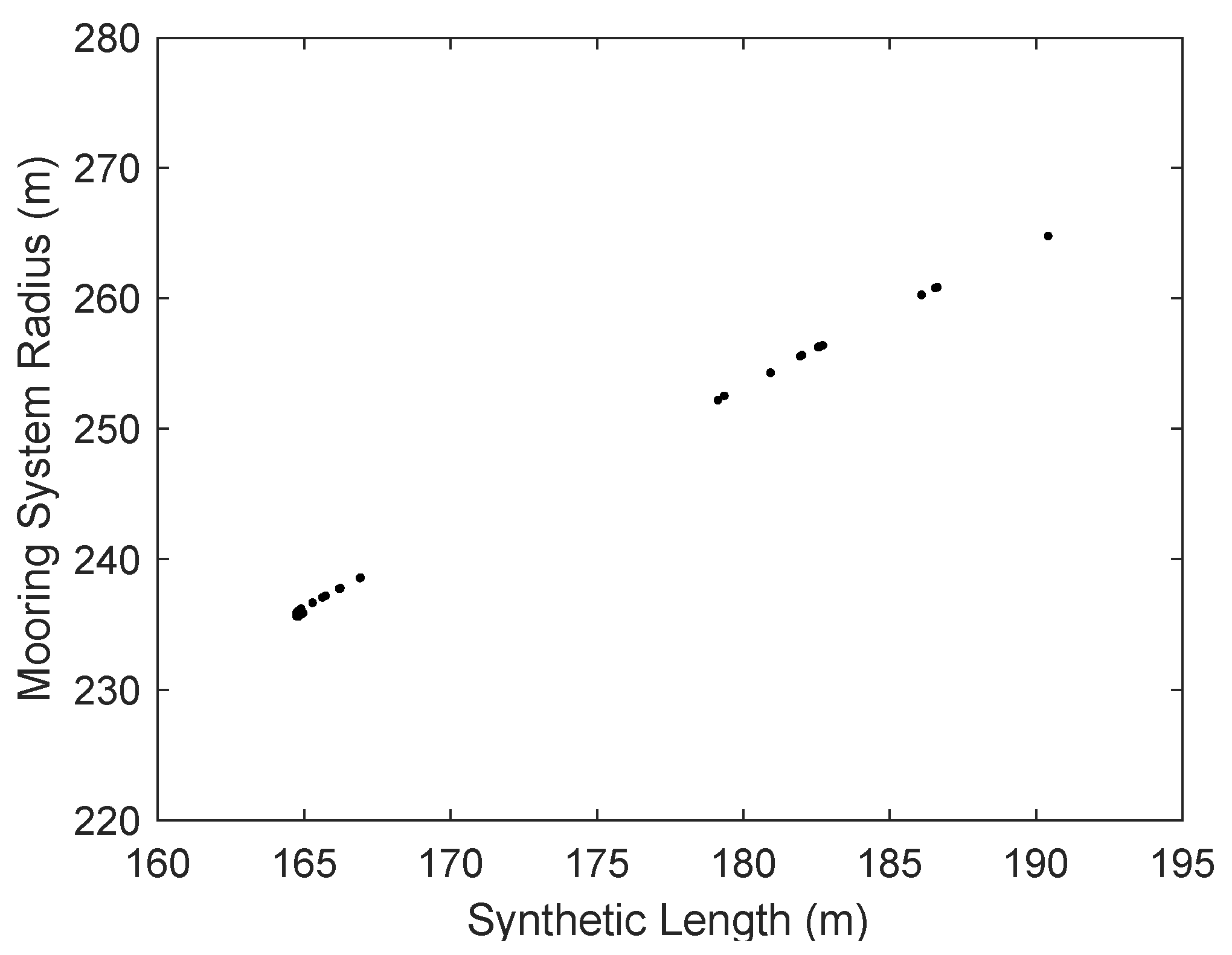
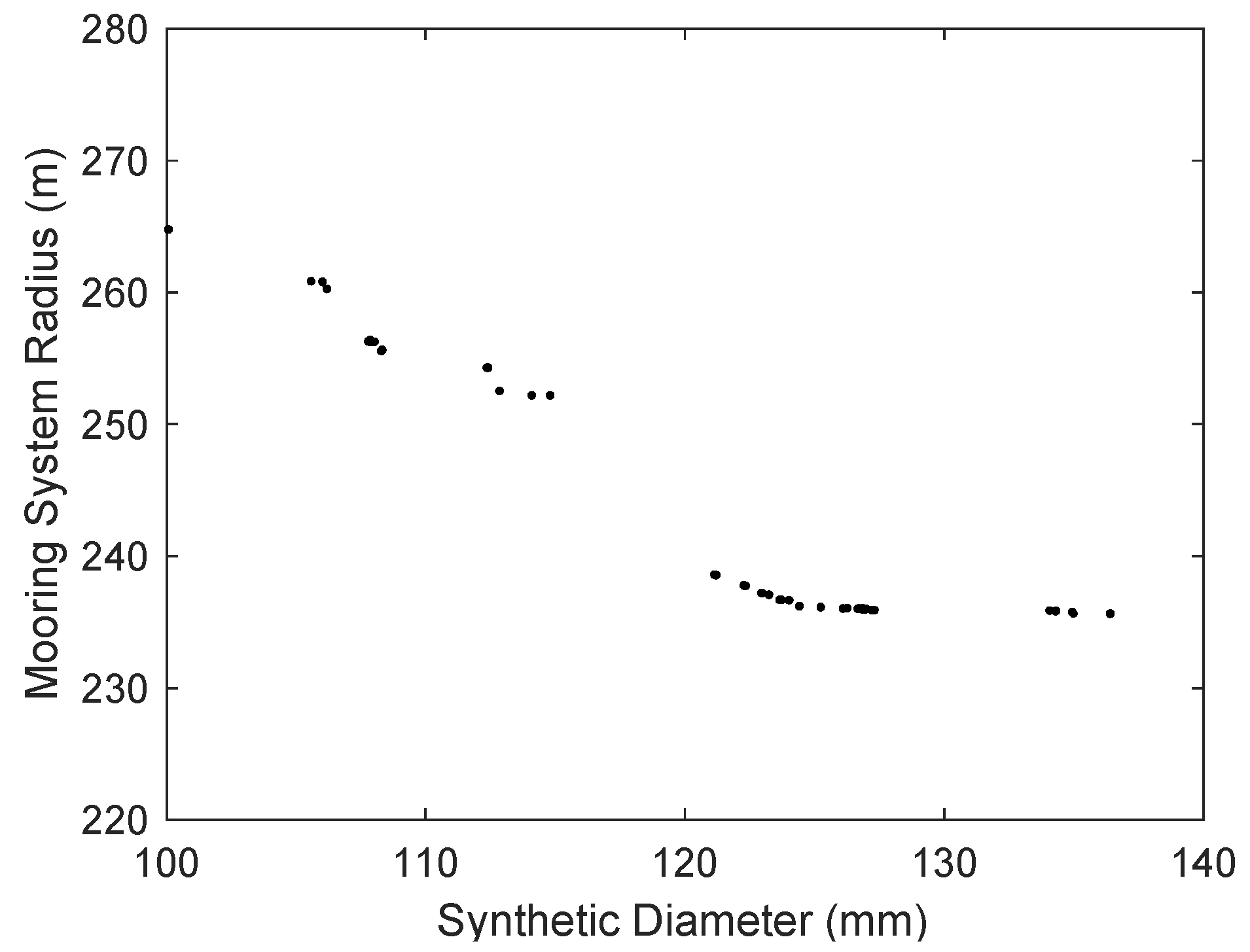
In this optimization problem one of the objectives, mooring system component cost, is a function of chain diameter, synthetic length and synthetic diameter. To gain a better understanding of the relationship between mooring system radius with respect to these variables plots are provided for mooring system radius vs. synthetic line length, chain diameter and synthetic diameter in
Figure 11,
Figure 12 and
Figure 13, respectively.
Figure 11 shows that the synthetic segment length increases with the mooring radius in a nearly linear fashion. This makes sense as one of the constraints of the mooring system is to keep the line tensions below a certain maximum, but it is also important to keep the tensions above a certain threshold to prevent slack lines. To maintain this balance the optimizer will need to increase the synthetic line length as the mooring radius increases
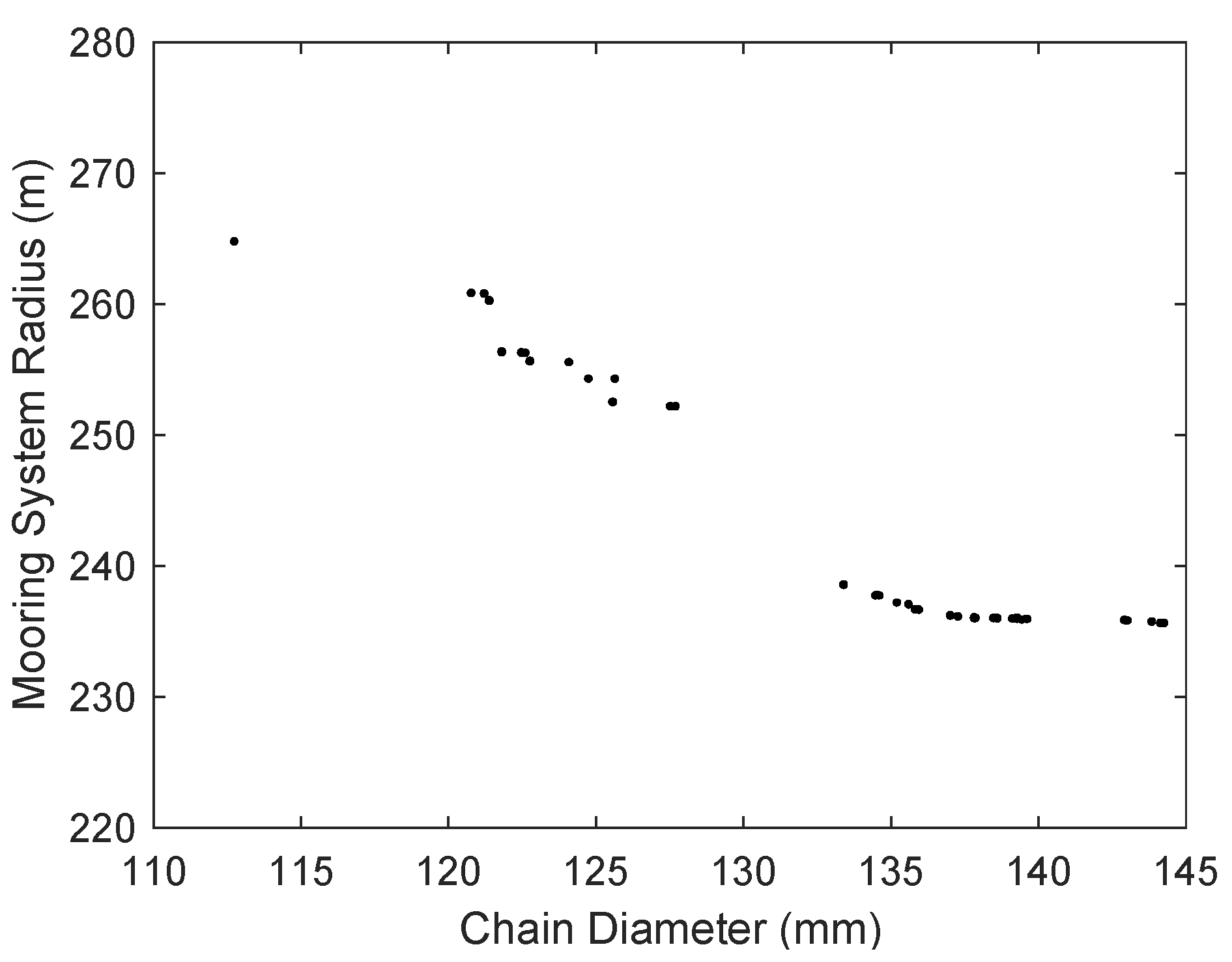
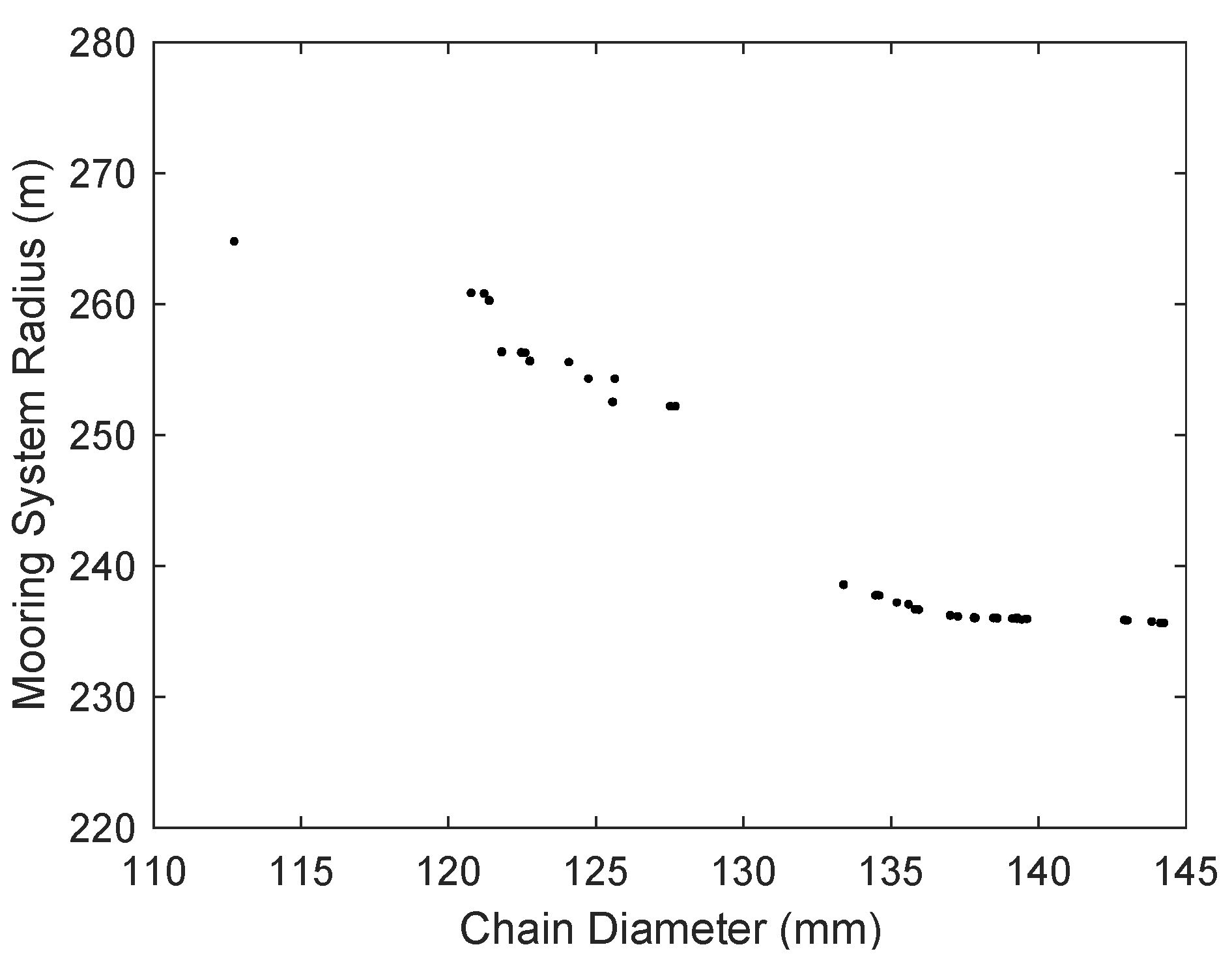
The second phenomenon illustrated in both
Figure 12 and
Figure 13 is the decrease in line diameter as mooring radius increases. This is likely due to two different effects acting in concert. First as mooring system radius increases so does mooring line length. As a result, the effective stiffness of each mooring line as well as the whole mooring system stiffness will decrease which will attract less loads necessitating smaller lines. In addition, as the radius increases the mooring line becomes more horizontal leading to a larger portion of the line tension vector counteracting the applied mean environmental load, in turn, resulting in smaller lines.
The most interesting aspect of the Pareto-optimal front presented in
Figure 10 is the gap in the front from designs jumping from a radius of 252 m to 239 m. To investigate the phenomenon the 252 m radius and 239 m radius designs were used to generate three interpolated designs between them. These three designs where then evaluated for potential constraint violations, which all failed. This suggests that the region between these two feasible designs contains designs that if feasible are dominated by other designs along the Pareto front. The three failed interpolated designs are presented as red dots on the Pareto-optimal front in
Figure 14.
To determine what it would take to make one of the interpolated designs feasible the design at a radius of 245 m was analyzed more closely. The synthetic line length varies in a very linear manner as shown in
Figure 11 so it was kept the same. The chain and synthetic diameters were then changed from 90% of the interpolated values to 110% of the interpolated values to see how much larger the lines need to be for the mooring system to be a valid solution. The chain diameter and synthetic diameter are scaled by the same amount and the constraint values are recorded. Designs at this interpolated radius and line length become valid after increasing the diameter of the lines by just 3%. Unfortunately, that 3% increase in diameter increases the cost of the mooring system to 116,800 USD or 3% more than the 239 m radius which has a cost of 113,300 USD. As the valid design along the Pareto front has both a smaller mooring footprint and a lower cost when compared to the valid interpolated value the design along the Pareto front will dominate the potential design for a mooring radius of 245 m.
Verification of Candidate Design with Full Suite of DLC 6.1 Simulations
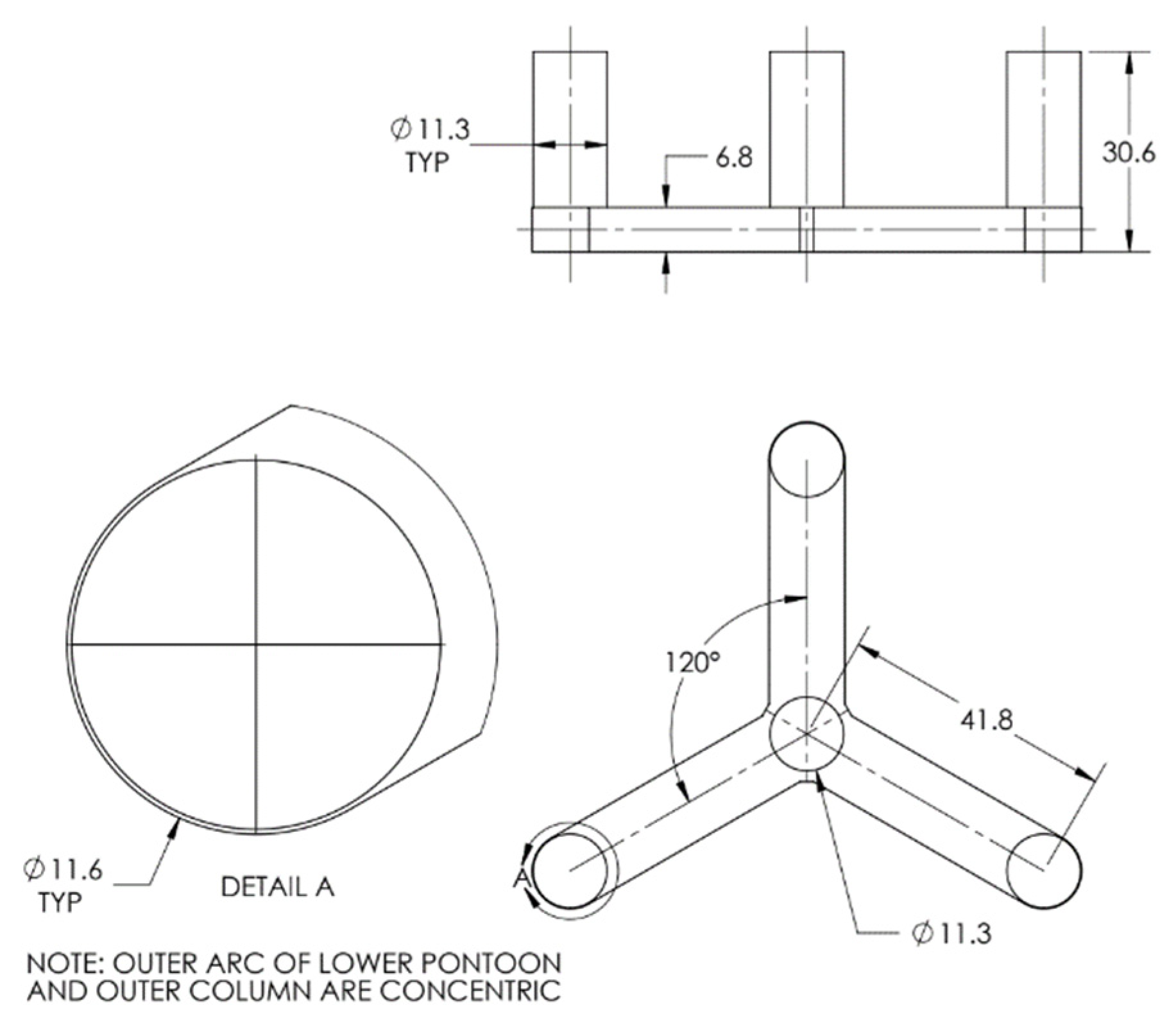
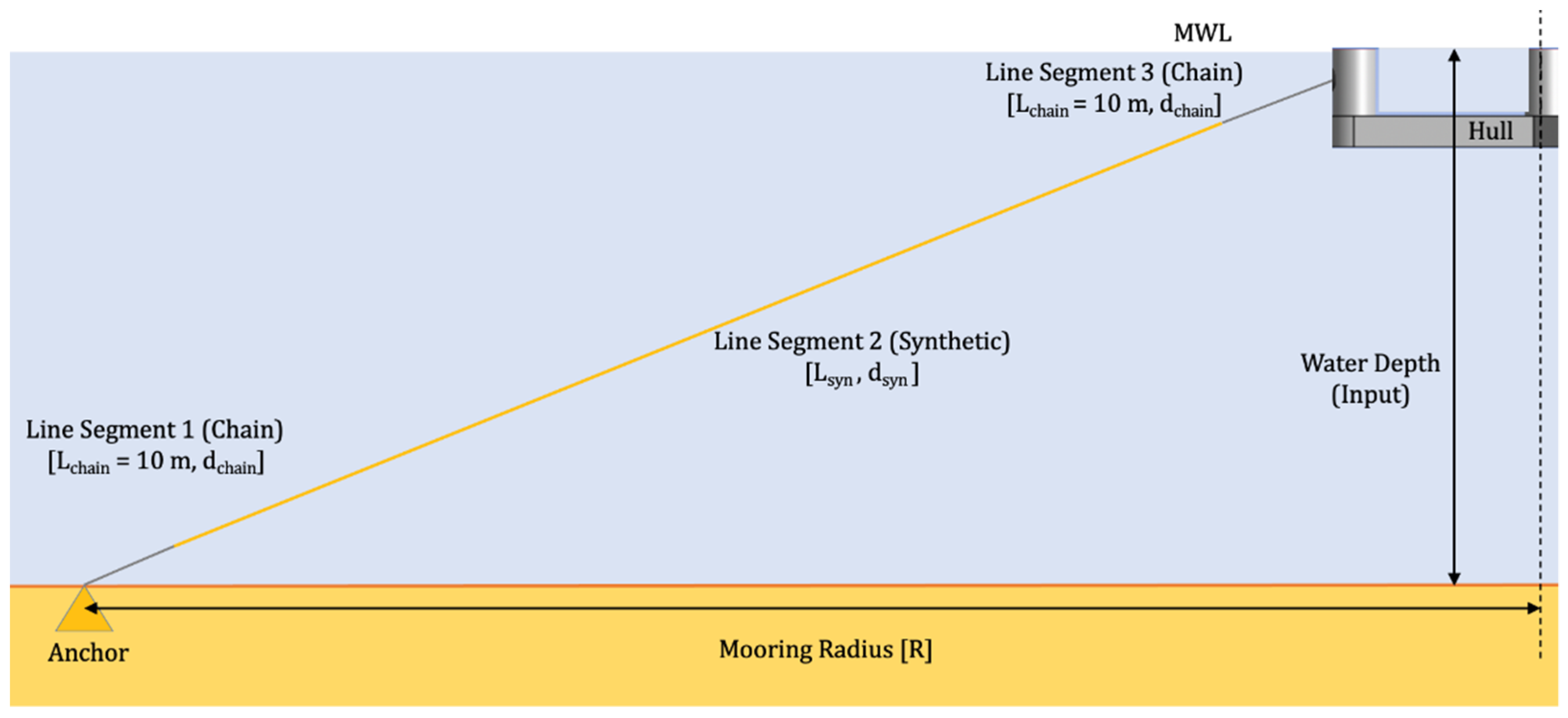
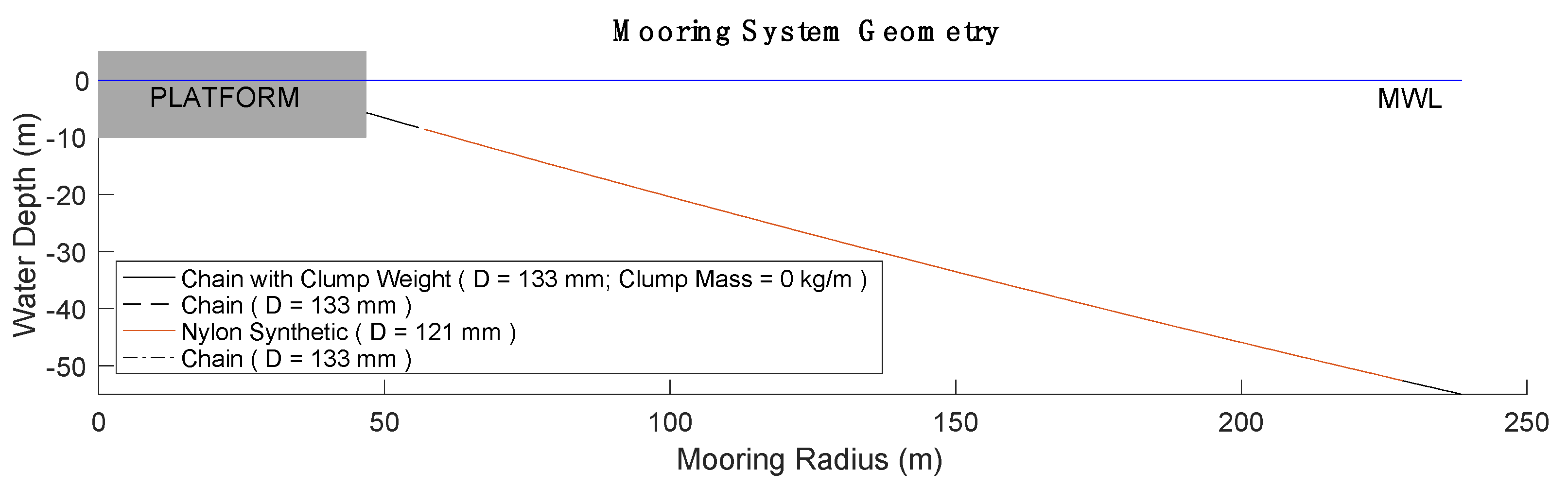
To make the optimization problem computationally feasible performance enhancements such as predicting the maximum design tension based on a shorter simulation time was used in addition to running fairly large timesteps for the simulations. In order to determine if this influenced the Pareto-optimal designs in any way, a full DLC 6.1 suite of simulations was run for one of the candidate designs and the tensions required for evaluating the constraints reexamined. The design picked to be analyzed was a design with a mooring radius of 239 m and a component cost of roughly 113,000 USD. This design was selected as it allowed for the smallest radius design before the mooring line costs begin to increase very drastically. This design has a mooring radius that is 10% smaller than the least expensive design and accomplishes this at a price that is 30% more than the least expensive design. A schematic of the mooring system shown to scale is provided in
Figure 15.
The candidate design mooring system is described in
Table 10. As outlined in the optimization problem description, this mooring system has three mooring lines spaced equally with each line fairlead connected to one of the outer columns on the VolturnUS 6-MW hull. This mooring system has 10 m of 133 mm diameter chain at the fairlead and anchor with a 167 m long length of 121 mm diameter synthetic spanning between the two chain segments. The fairlead attachments are situated 5.4 m below the water connected to the radius of the outer columns 45.7 m away from the center of the platform.
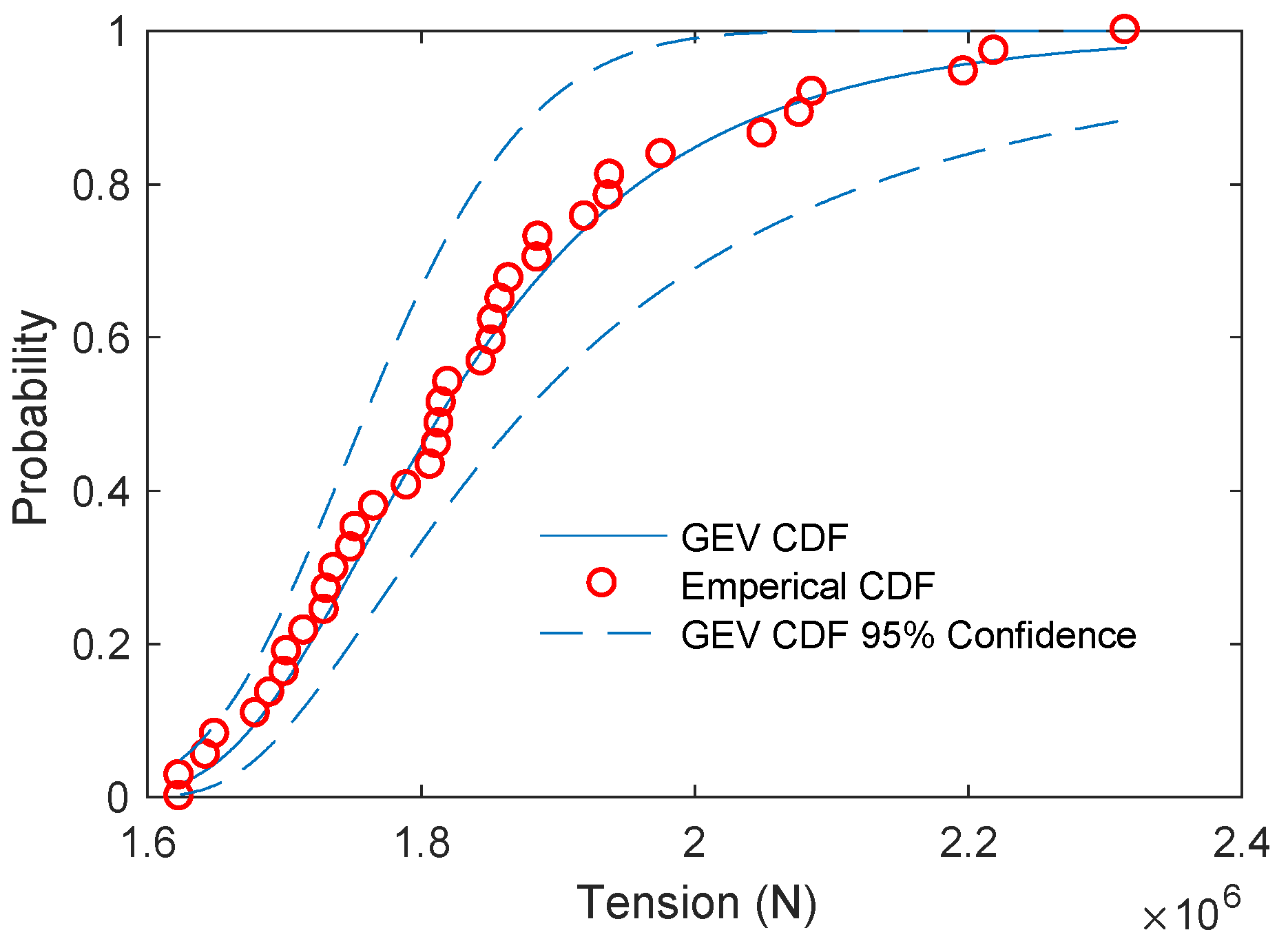
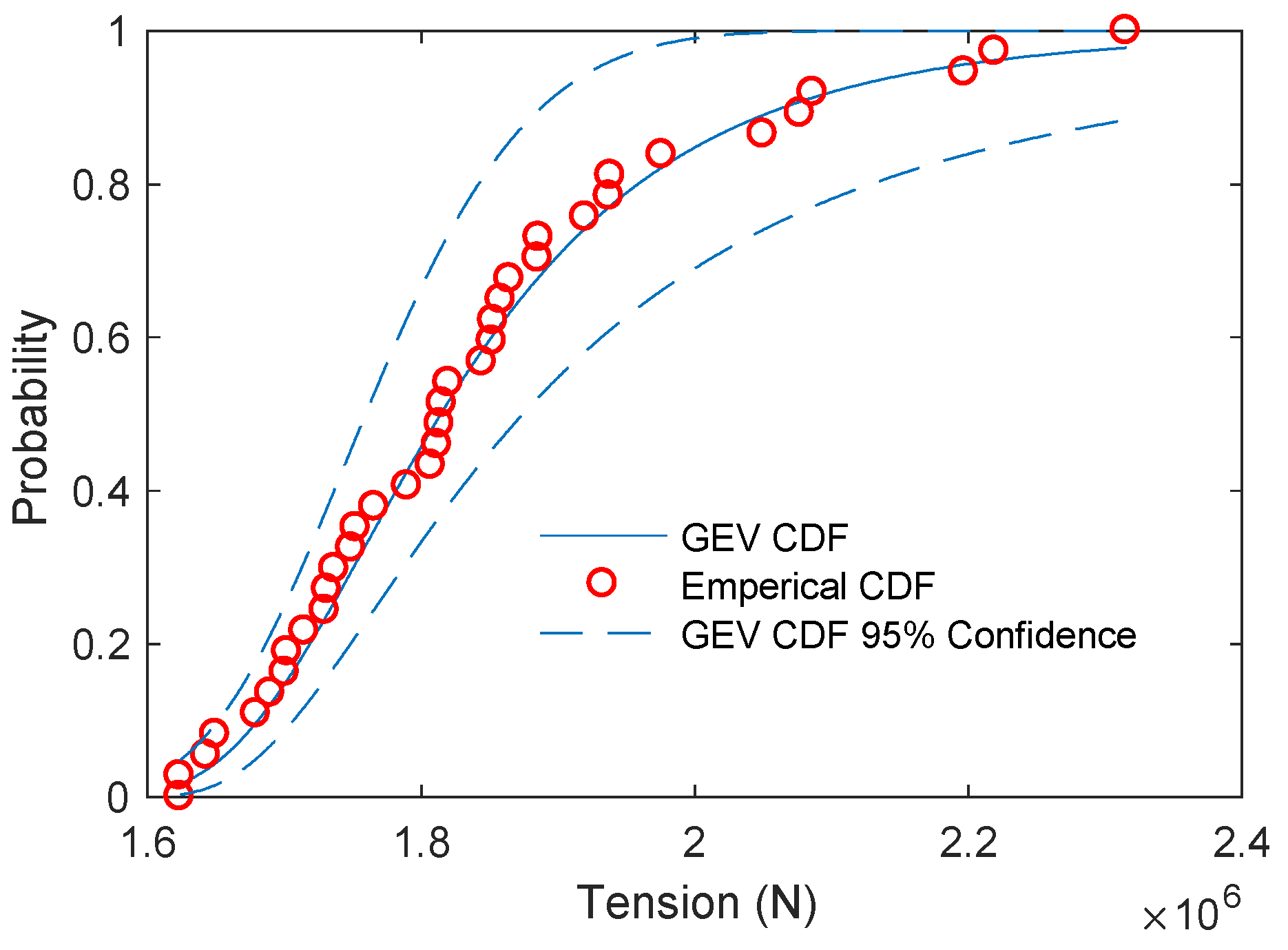
The results for the DLC 6.1 runs are presented in
Table 11. The same seeds were used as presented in
Figure 9 for determining the GEV parameters. The initial run and the statistics are similar when compared to the initial run with the coefficients of variation for the mean tension and the standard deviation of the line being 0.2% and 6.1% respectively. This compares well with the statistics from the trial run of 0.2% and 5.4% for mean tension and standard deviation. The 1000 s extrapolated value for the candidate design using the GEV distribution was 1815 kN which is 1% lower than the ABS design value based on the mean of the maximum tension response value of 1835 kN. Again, this compares very well with the trial run where the GEV extrapolated value was 2% higher than the ABS design value. If proper care is taken to carefully choose a seed and an appropriate statistical fit a shorter simulation can be run to obtain maximum line responses that are close to the ABS design values. It should be noted that this was for one wave orientation, and it is possible that this approach will not work in all cases. However, the results for this one optimization scenario were deemed very acceptable.
6. Conclusions
This paper outlines the effort to implement a MOGA, NSGA II, for design optimization of synthetic mooring systems for FOWTs. The objective functions for this problem are fairly trivial, but a significant time investment was made ensuring the constraints implemented would lead to mooring designs that were realistic and adhered to the ABS/IEC design guidelines. To adequately capture the physics of a mooring system which can experience both geometric and material non-linearities it is imperative that time-domain simulations are run. Time-domain simulations are computationally expensive so the constraints are posed in such a way that inadequate designs can be screened out which prevents running time domain simulations unnecessarily. To make the problem computationally feasible on a normal desktop computer some concessions needed to be made such as reducing the number of simulations done, using fairly large timesteps and carefully selecting seeds which will produce line tensions representative of the true design value.
This method was then used to develop a set of Pareto-optimal designs which balance the footprint of the mooring system and the mooring system component cost. The Pareto-optimal solutions found from this optimization contained a gap in the front which was found to be a result of the designs in that area having constraint violations due to the tensions in the line being slightly too large for the materials load capacity. The lines would handle the load in the lines if both the synthetic and chain segments were increased in diameter by 3% however the cost increase from this resulted in a design that would be dominated by designs having a smaller component cost and radius.
A design that resulted in a small footprint was analyzed more in depth to determine if the 1000 s of data used to extrapolate the maximum tension was adequate. The seed used was carefully chosen based on a DLC 6.1 run for another synthetic mooring system. The candidate design mooring system was then subjected to the same DLC 6.1 simulations with the same seed as the initial analysis of the synthetic mooring system. The value obtained from the 1000 s of extrapolated data was within 2% of the ABS design value found by taking the mean of the maximum values of the six one-hour simulations. Overall, this methodology provides designs that balance mooring line cost and mooring footprint and would be a good starting point for performing a full suite of ABS/IEC simulations.
Ideally, for future work this method would be used without the performance enhancements needed to make it computationally feasible on the hardware available. This would be fairly easy to implement given a computer with more cores available for parallel processing as the computer used in this study was an average desktop computer with four cores. With adequate computational resources the OpenFAST time domain simulations could be run with fully turbulent wind fields for the full 3600 s which at this point is not possible as it would require timesteps that are so small it would make the problem computationally infeasible.
Moving forward there are recommendations for improvements. Most importantly increasing the accuracy of the cost data for evaluating the cost objective function. Currently the only cost considered is the material cost for the chain and synthetic segments, but to deploy a FOWT there are many additional costs that need to be considered including engineering and project management, installation costs and connection costs. Lastly and most importantly from an engineering perspective is the anchoring costs which depend on both soil conditions and loads which would only be known after running the OpenFAST time domain simulations. Factoring in these additional costs would lead to much more realistic estimates moving forward.
It would be interesting to expand this approach to other types of mooring system configurations such as chain catenary or hybrid semi-taut systems. It is not clear if these configurations would be a good candidate for multi-objective optimization as it is unknown if cost and mooring footprint would be competing. These configurations could be good candidates for single objective optimization where the same tiered-constraint methodology proposed by the authors could be implemented to determine the feasibility by screening out designs and avoid running time-domain simulations on infeasible designs.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}