Soft Robotic Hands and Tactile Sensors for Underwater Robotics



Abstract
:1. Introduction
2. A Brief History of Soft Robotics
2.1. Emergence of Soft Robotics
2.2. Recent Technologies
2.3. Challenges
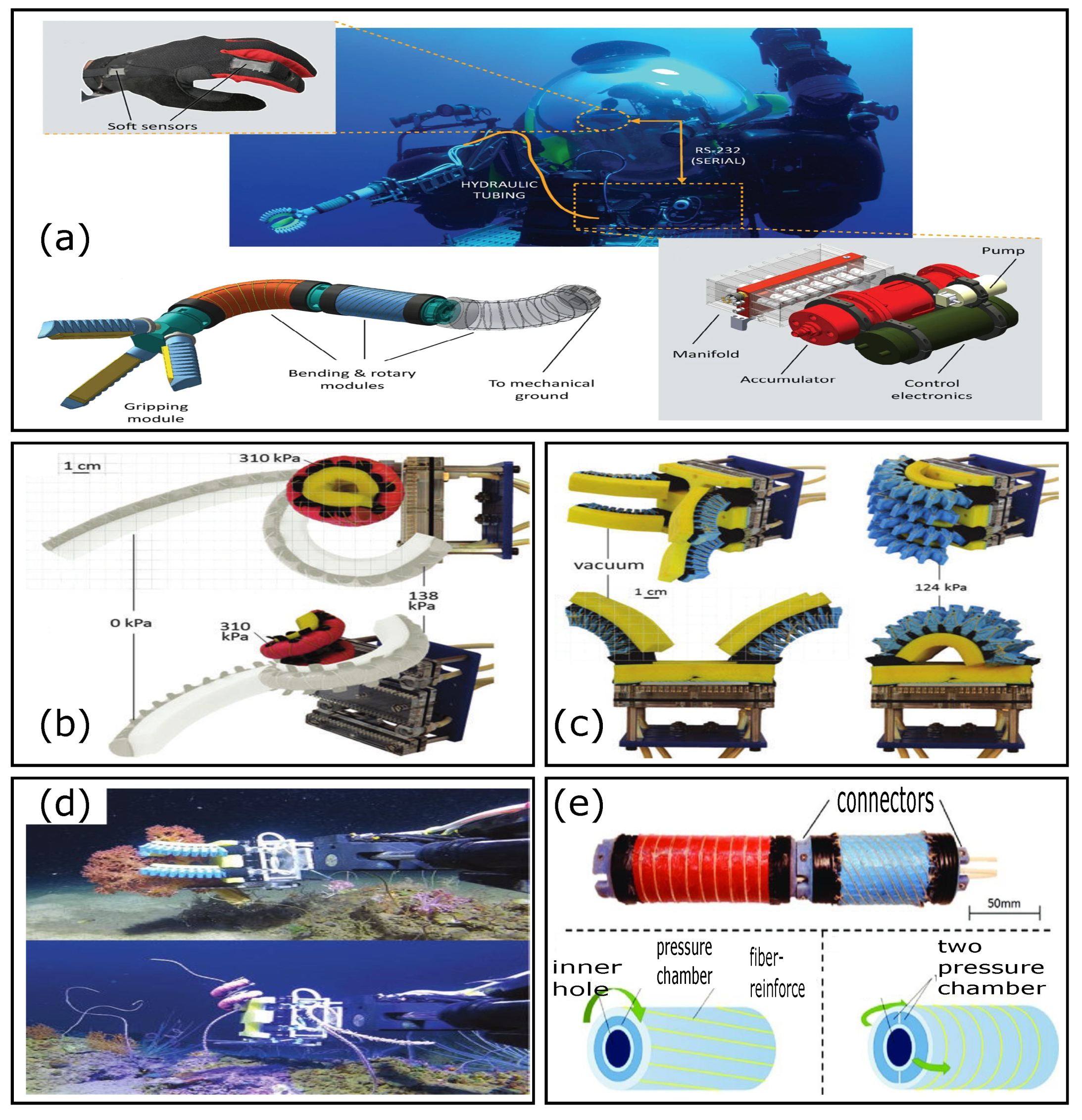
3. Soft Robotic Hands in UW Applications
4. Tactile Sensing Technologies
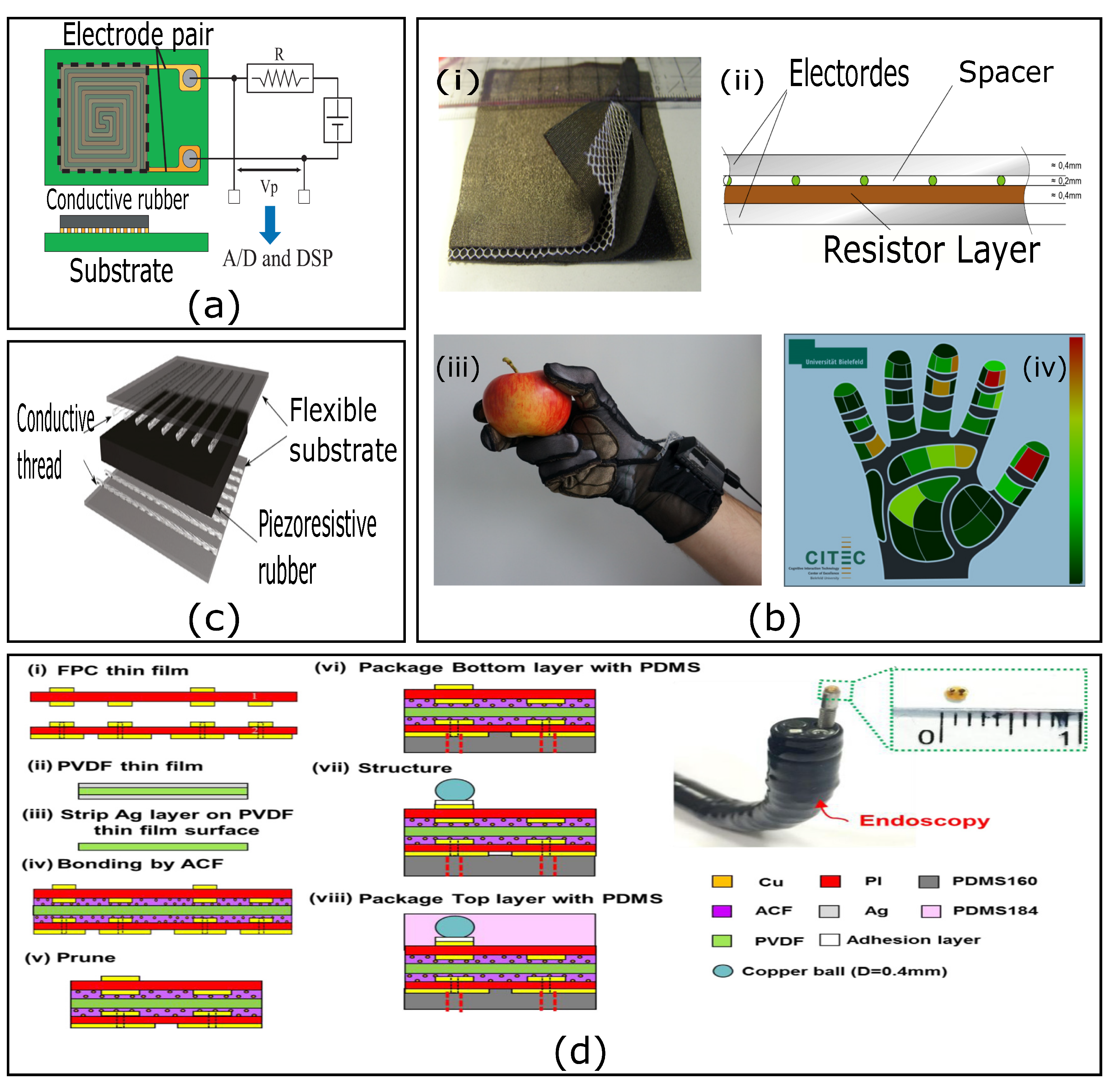
4.1. Piezo-Electric and Piezo-Resistive Tactile Sensors

{kind=link}
{kind=link}
{kind=link}
| Sensing Method | References, Year | Materials Used | Functionality/ Measurement | Sensing Range | Applications |
|---|---|---|---|---|---|
| Piezo- electric & Piezo- resistive | [127], 2009 | Poly- vinylidene Fluoride (PVDF) polymer films | Normal force | - | Anthro- pomorphic robot hand |
| [128], 2013 | PVDF polymer films | Normal force | (0.1–20) N | Anthro- pomorphic robot hand | |
| [125], 2015 | Piezo- resistive fabric | Normal force | (1–500) kPa | Surface of human-like soft skin | |
| [129], 2016 | PVDF- Sensing material, Cu- Electrode | Normal force | - | Endoscopy to identify submucosal tumor | |
| Capacitive | [131], 2008 | PDMS- Structural material, Cu- Electrode | Normal, and shear force | (0–131) kPa | Artificial, or Robot hand |
| [132], 2011 | Silicone | Normal force | - | iCub Robot hand | |
| [133], 2012 | Silicone | Slip detection | - | Robotic adaptive gripper | |
| [134], 2016 | PDMS- Structural material, Au- Electrode Polystyrene- Dielectric layer | Contact, bending, and stretching forces | (0–50) N | Electronic skins, wearable robotics, and biomedical devices | |
| [135], 2018 | PDMS- Structural material, Polyamide- Dielectric layer, Ag Nanowire- Electrode | Detecting gas flow, and bending motion | - | Motion detection, health monitoring, and intelligent robots | |
| Optical Imaging | [136], 2013 | Silicone | Contact force | - | Magnetic Resonance Imaging (MRI), Minimally Invasive Surgery (MIS) |
| [137], 2018 | Silicone | Contact force | - | M2 gripper, Identifying sub-mucosal tumor | |
| [138], 2019 | PDMS | Contact force, Frequency of vibration | - | - | |
| Magnetic | [139], 2016 | Magnetic Nano- composite (Highly elastic poly- dimethyl siloxane + iron nanowires) | Vertical, and shear force | - | Braille reading |
| Organic Field Effect Transistor (OFET) | [140], 2018 | Charge modulated OFET+ PVDF | Pressure and temperature | Pressure (40–200) kPa and temperature (8–50) °C | Robotics and wearable electronics |
4.2. Capacitive Tactile Sensors
4.3. Optical Imaging Based Tactile Sensors
4.4. Other Interesting Methods for Tactile Sensing and Fusions
4.5. Tactile Sensors for UW Environment
5. Prospects of UW Soft Robotics
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Whitcomb, L.L. Underwater robotics: Out of the research laboratory and into the field. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 709–716. [Google Scholar]
- Yuh, J. Development in underwater robotics. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 2, pp. 1862–1867. [Google Scholar]
- Robison, B.H. The coevolution of undersea vehicles and deep-sea research. Mar. Technol. Soc. J. 1999, 33, 65–73. [Google Scholar] [CrossRef]
- Yoerger, D.R.; Bradley, A.M.; Jakuba, M.; German, C.R.; Shank, T.; Tivey, M. Autonomous and remotely operated vehicle technology for hydrothermal vent discovery, exploration, and sampling. Oceanography 2007, 20, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Kalwa, J.; Pascoal, A.; Ridao, P.; Birk, A.; Eichhorn, M.; Brignone, L.; Caccia, M.; Alves, J.; Santos, R. The European R&D-Project MORPH: Marine robotic systems of self-organizing, logically linked physical nodes. IFAC Proc. Vol. 2012, 45, 226–231. [Google Scholar]
- Ridao, P.; Carreras, M.; Ribas, D.; Garcia, R. Visual inspection of hydroelectric dams using an autonomous underwater vehicle. J. Field Robot. 2010, 27, 759–778. [Google Scholar] [CrossRef] [Green Version]
- Marani, G.; Choi, S.K.; Yuh, J. Underwater autonomous manipulation for intervention missions AUVs. Ocean. Eng. 2009, 36, 15–23. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Rossiter, J.; Iida, F.; Cianchetti, M.; Margheri, L. Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giorgio-Serchi, F.; Weymouth, G.D. Underwater soft robotics, the benefit of body-shape variations in aquatic propulsion. In Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017; pp. 37–46. [Google Scholar]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, A.; Kirchner, F. Object recognition and localization: The role of tactile sensors. Sensors 2014, 14, 3227–3266. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Hernandez, U. Tactile sensors. In Scholarpedia of Touch; Springer: Berlin/Heidelberg, Germany, 2016; pp. 783–796. [Google Scholar]
- Shiva, A.; Stilli, A.; Noh, Y.; Faragasso, A.; De Falco, I.; Gerboni, G.; Cianchetti, M.; Menciassi, A.; Althoefer, K.; Wurdemann, H.A. Tendon-based stiffening for a pneumatically actuated soft manipulator. IEEE Robot. Autom. Lett. 2016, 1, 632–637. [Google Scholar] [CrossRef] [Green Version]
- Saigo, H.; Naruse, M.; Okamura, K.; Hori, H.; Ojima, I. Analysis of soft robotics based on the concept of category of mobility. Complexity 2019, 1–12. [Google Scholar] [CrossRef]
- Whitesides, G.M. Soft robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar] [CrossRef] [PubMed]
- Corley, A.M. iRobot’s Shape-Shifting Blob ’Bot Takes Its First Steps. 2009. Available online: https://https://spectrum.ieee.org/automaton/robotics/robotics-software/irobot-soft-morphing-blob-chembot (accessed on 20 May 2021).
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Duriez, C.; Bieze, T. Soft robot modeling, simulation and control in real-time. In Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017; pp. 103–109. [Google Scholar]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. Int. Ed. 2011, 50, 1890–1895. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, C.; Cho, M.; Ahn, S.H. Soft tendril-inspired grippers: Shape morphing of programmable polymer–paper bilayer composites. ACS Appl. Mater. Interfaces 2018, 10, 10419–10427. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Byun, J.; Lee, Y.; Yoon, J.; Lee, B.; Oh, E.; Chung, S.; Lee, T.; Cho, K.J.; Kim, J.; Hong, Y. Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots. Sci. Robot. 2018, 3, eaas9020. [Google Scholar] [CrossRef] [Green Version]
- Koivikko, A.; Raei, E.S.; Mosallaei, M.; Mäntysalo, M.; Sariola, V. Screen-printed curvature sensors for soft robots. IEEE Sens. J. 2017, 18, 223–230. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [Green Version]
- Connolly, F.; Walsh, C.J.; Bertoldi, K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proc. Natl. Acad. Sci. USA 2017, 114, 51–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pawlowski, B.; Sun, J.; Xu, J.; Liu, Y.; Zhao, J. Modeling of soft robots actuated by twisted-and-coiled actuators. IEEE/ASME Trans. Mechatron. 2018, 24, 5–15. [Google Scholar] [CrossRef]
- Mitchell, S.K.; Wang, X.; Acome, E.; Martin, T.; Ly, K.; Kellaris, N.; Venkata, V.G.; Keplinger, C. An Easy-to-Implement Toolkit to Create Versatile and High-Performance HASEL Actuators for Untethered Soft Robots. Adv. Sci. 2019, 6, 1900178. [Google Scholar] [CrossRef] [Green Version]
- Sumbre, G.; Fiorito, G.; Flash, T.; Hochner, B. Octopuses use a human-like strategy to control precise point-to-point arm movements. Curr. Biol. 2006, 16, 767–772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft mobile robots with on-board chemical pressure generation. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2017; pp. 525–540. [Google Scholar]
- Shintake, J.; Sonar, H.; Piskarev, E.; Paik, J.; Floreano, D. Soft pneumatic gelatin actuator for edible robotics. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6221–6226. [Google Scholar]
- Zinn, M.; Khatib, O.; Roth, B.; Salisbury, J.K. Actuation methods for human-centered robotics and associated control challenges. In Control Problems in Robotics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 105–119. [Google Scholar]
- da Cunha, M.P.; Debije, M.G.; Schenning, A.P. Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 2020, 49, 6568–6578. [Google Scholar] [CrossRef]
- Rogóż, M.; Zeng, H.; Xuan, C.; Wiersma, D.S.; Wasylczyk, P. Light-driven soft robot mimics caterpillar locomotion in natural scale. Adv. Opt. Mater. 2016, 4, 1689–1694. [Google Scholar] [CrossRef]
- Zeng, H.; Wani, O.M.; Wasylczyk, P.; Priimagi, A. Light-driven, caterpillar-inspired miniature inching robot. Macromol. Rapid Commun. 2018, 39, 1700224. [Google Scholar] [CrossRef] [PubMed]
- Rogóż, M.; Dradrach, K.; Xuan, C.; Wasylczyk, P. A Millimeter-Scale Snail Robot Based on a Light-Powered Liquid Crystal Elastomer Continuous Actuator. Macromol. Rapid Commun. 2019, 40, 1900279. [Google Scholar] [CrossRef] [PubMed]
- Yamada, M.; Kondo, M.; Miyasato, R.; Naka, Y.; Mamiya, J.I.; Kinoshita, M.; Shishido, A.; Yu, Y.; Barrett, C.J.; Ikeda, T. Photomobile polymer materials—Various three-dimensional movements. J. Mater. Chem. 2009, 19, 60–62. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 1–12. [Google Scholar] [CrossRef]
- Nagaoka, T.; Mao, Z.; Takemura, K.; Yokota, S.; Kim, J.w. ECF (electro-conjugate fluid) finger with bidirectional motion and its application to a flexible hand. Smart Mater. Struct. 2019, 28, 025032. [Google Scholar] [CrossRef]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C.M. Design optimisation of soft silicone pneumatic actuators using finite element analysis. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 44–49. [Google Scholar]
- Wakimoto, S.; Suzumori, K.; Ogura, K. Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Adv. Robot. 2011, 25, 1311–1330. [Google Scholar] [CrossRef] [Green Version]
- Paek, J.; Cho, I.; Kim, J. Microrobotic tentacles with spiral bending capability based on shape-engineered elastomeric microtubes. Sci. Rep. 2015, 5, 10768. [Google Scholar] [CrossRef]
- Lee, D.Y.; Koh, J.S.; Kim, J.S.; Kim, S.W.; Cho, K.J. Deformable-wheel robot based on soft material. Int. J. Precis. Eng. Manuf. 2013, 14, 1439–1445. [Google Scholar] [CrossRef]
- Huynh, T.P.; Sonar, P.; Haick, H. Advanced materials for use in soft self-healing devices. Adv. Mater. 2017, 29, 1604973. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rueben, J.; Walker, S.; Huhn, S.; Simonsen, J.; Mengüç, Y. Developing a UV-Curable, Environmentally Benign and Degradable Elastomer for Soft Robotics. MRS Adv. 2018, 3, 1551–1556. [Google Scholar] [CrossRef]
- Hoang, T.T.; Phan, P.T.; Thai, M.T.; Lovell, N.H.; Do, T.N. Bio-Inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing. Adv. Mater. Technol. 2020, 5, 2000724. [Google Scholar] [CrossRef]
- Merz, R.; Prinz, F.; Ramaswami, K.; Terk, M.; Weiss, L. Shape deposition manufacturing. In Proceedings of the 1994 International Solid Freeform Fabrication Symposium, Austin, TX, USA, 8–10 August 1994; The University of Texas at Austin: Austin, TX, USA, 1994. [Google Scholar]
- Cham, J.G.; Bailey, S.A.; Clark, J.E.; Full, R.J.; Cutkosky, M.R. Fast and robust: Hexapedal robots via shape deposition manufacturing. Int. J. Robot. Res. 2002, 21, 869–882. [Google Scholar] [CrossRef]
- Cho, K.J.; Koh, J.S.; Kim, S.; Chu, W.S.; Hong, Y.; Ahn, S.H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Yang, D.; Verma, M.S.; Thus, J.H.; Mosadegh, B.; Keplinger, C.; Lee, B.; Khashai, F.; Lossner, E.; Suo, Z.; Whitesides, G.M. Buckling pneumatic linear actuators inspired by muscle. Adv. Mater. Technol. 2016, 1, 1600055. [Google Scholar] [CrossRef]
- Hawkes, E.; An, B.; Benbernou, N.M.; Tanaka, H.; Kim, S.; Demaine, E.D.; Rus, D.; Wood, R.J. Programmable matter by folding. Proc. Natl. Acad. Sci. USA 2010, 107, 12441–12445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koh, J.S.; Cho, K.J. Omegabot: Biomimetic inchworm robot using SMA coil actuator and smart composite microstructures (SCM). In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1154–1159. [Google Scholar]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- MacCurdy, R.; Katzschmann, R.; Kim, Y.; Rus, D. Printable hydraulics: A method for fabricating robots by 3D co-printing solids and liquids. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3878–3885. [Google Scholar]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patel, D.K.; Sakhaei, A.H.; Layani, M.; Zhang, B.; Ge, Q.; Magdassi, S. Highly stretchable and UV curable elastomers for digital light processing based 3D printing. Adv. Mater. 2017, 29, 1606000. [Google Scholar] [CrossRef]
- Robertson, M.A.; Sadeghi, H.; Florez, J.M.; Paik, J. Soft pneumatic actuator fascicles for high force and reliability. Soft Robot. 2017, 4, 23–32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspiration Biomimetics 2011, 6, 026007. [Google Scholar] [CrossRef] [PubMed]
- Seok, S.; Onal, C.D.; Cho, K.J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mechatron. 2012, 18, 1485–1497. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.Y.; Rodrigue, H.; Song, S.H.; Chu, W.S.; Ahn, S.H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 405–420. [Google Scholar]
- Renda, F.; Giorgio-Serchi, F.; Boyer, F.; Laschi, C. Locomotion and elastodynamics model of an underwater shell-like soft robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1158–1165. [Google Scholar]
- Majidi, C. Soft robotics: A perspective—Current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Majidi, C. Soft-Matter Engineering for Soft Robotics. Adv. Mater. Technol. 2019, 4, 1800477. [Google Scholar] [CrossRef] [Green Version]
- Campo, D.V.Y.M.A.; Valentine, A.D.; Walsh, C.J.; Lewis, J.A.; Frutiger, A.; Muth, J.T. Capacitive Soft Strain Sensors via Multicore–Shell Fiber Printing. Adv. Mater. 2015, 27, 2440–2446. [Google Scholar]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly sensitive skin-mountable strain gauges based entirely on elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Keplinger, C.; Sun, J.Y.; Foo, C.C.; Rothemund, P.; Whitesides, G.M.; Suo, Z. Stretchable, transparent, ionic conductors. Science 2013, 341, 984–987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jang, K.I.; Li, K.; Chung, H.U.; Xu, S.; Jung, H.N.; Yang, Y.; Kwak, J.W.; Jung, H.H.; Song, J.; Yang, C.; et al. Self-assembled three-dimensional network designs for soft electronics. Nat. Commun. 2017, 8, 1–10. [Google Scholar] [CrossRef]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch fabrication of customizable silicone-textile composite capacitive strain sensors for human motion tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.J.N.; Rastak, R.; Molina-Lopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J.; et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef] [PubMed]
- Hosoda, K.; Tada, Y.; Asada, M. Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robot. Auton. Syst. 2006, 54, 104–109. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef]
- Chalon, M.; Wedler, A.; Baumann, A.; Bertleff, W.; Beyer, A.; Butterfaß, J.; Grebenstein, M.; Gruber, R.; Hacker, F.; Kraemer, E. Dexhand: A space qualified multi-fingered robotic hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2204–2210. [Google Scholar]
- Wang, S.; Jiang, H.; Myung Huh, T.; Sun, D.; Ruotolo, W.; Miller, M.; Roderick, W.R.; Stuart, H.S.; Cutkosky, M.R. Spinyhand: Contact load sharing for a human-scale climbing robot. J. Mech. Robot. 2019, 11. [Google Scholar] [CrossRef] [Green Version]
- Ruotolo, W.; Roig, F.S.; Cutkosky, M.R. Load-sharing in soft and spiny paws for a large climbing robot. IEEE Robot. Autom. Lett. 2019, 4, 1439–1446. [Google Scholar] [CrossRef]
- Laschi, C. Octobot-A robot octopus points the way to soft robotics. IEEE Spectr. 2017, 54, 38–43. [Google Scholar] [CrossRef]
- Kelley, C.; Kerby, T.; Sarradin, P.M.; Sarrazin, J.; Lindsay, D.J. Submersibles and remotely operated vehicles. In Biological Sampling in the Deep Sea; John Wiley & Sons: New York, NY, USA, 2016; pp. 285–305. [Google Scholar]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Phillips, B.T.; Becker, K.P.; Kurumaya, S.; Galloway, K.C.; Whittredge, G.; Vogt, D.M.; Teeple, C.B.; Rosen, M.H.; Pieribone, V.A.; Gruber, D.F.; et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Kurumaya, S.; Phillips, B.T.; Becker, K.P.; Rosen, M.H.; Gruber, D.F.; Galloway, K.C.; Suzumori, K.; Wood, R.J. A modular soft robotic wrist for underwater manipulation. Soft Robot. 2018, 5, 399–409. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Cheng, J.; Chen, X.; Sun, W.; Fang, X.; Hu, K.; Xie, Z.; Wang, T.; Wen, L. A bio-inspired soft robotic arm: Kinematic modeling and hydrodynamic experiments. J. Bionic Eng. 2018, 15, 204–219. [Google Scholar] [CrossRef]
- Gong, Z.; Fang, X.; Chen, X.; Cheng, J.; Xie, Z.; Liu, J.; Chen, B.; Yang, H.; Kong, S.; Hao, Y.; et al. A soft manipulator for efficient delicate grasping in shallow water: Modeling, control, and real-world experiments. Int. J. Robot. Res. 2021, 40, 449–469. [Google Scholar] [CrossRef]
- Gong, Z.; Xie, Z.; Yang, X.; Wang, T.; Wen, L. Design, fabrication and kinematic modeling of a 3D-motion soft robotic arm. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 509–514. [Google Scholar]
- Morin, S.A.; Shepherd, R.F.; Kwok, S.W.; Stokes, A.A.; Nemiroski, A.; Whitesides, G.M. Camouflage and display for soft machines. Science 2012, 337, 828–832. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Cheng, J.; Hu, K.; Wang, T.; Wen, L. An inverse kinematics method of a soft robotic arm with three-dimensional locomotion for underwater manipulation. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 516–521. [Google Scholar]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Ren, Z.; Wang, T.; Wen, L. Universal soft pneumatic robotic gripper with variable effective length. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6109–6114. [Google Scholar]
- Hao, Y.; Wang, T.; Ren, Z.; Gong, Z.; Wang, H.; Yang, X.; Guan, S.; Wen, L. Modeling and experiments of a soft robotic gripper in amphibious environments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417707148. [Google Scholar] [CrossRef]
- Walker, I.D.; Dawson, D.M.; Flash, T.; Grasso, F.W.; Hanlon, R.T.; Hochner, B.; Kier, W.M.; Pagano, C.C.; Rahn, C.D.; Zhang, Q.M. Continuum robot arms inspired by cephalopods. In Unmanned Ground Vehicle Technology VII; International Society for Optics and Photonics: Bellingham, WA, USA, 2005; Volume 5804, pp. 303–314. [Google Scholar]
- Cianchetti, M.; Arienti, A.; Follador, M.; Mazzolai, B.; Dario, P.; Laschi, C. Design concept and validation of a robotic arm inspired by the octopus. Mater. Sci. Eng. 2011, 31, 1230–1239. [Google Scholar] [CrossRef]
- Bemfica, J.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U.; Vassura, G. Mechatronic design of a three-fingered gripper for underwater applications. IFAC Proc. Vol. 2013, 46, 307–312. [Google Scholar] [CrossRef]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PLoS ONE 2018, 13, e0200386. [Google Scholar] [CrossRef] [PubMed]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Prats, M.; Garcia, J.; Wirth, S.; Ribas, D.; Sanz, P.; Ridao, P.; Gracias, N.; Oliver, G. Multipurpose autonomous underwater intervention: A systems integration perspective. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1379–1384. [Google Scholar]
- De Novi, G.; Melchiorri, C.; Garcia, J.; Sanz, P.; Ridao, P.; Oliver, G. A new approach for a reconfigurable autonomous underwater vehicle for intervention. In Proceedings of the 2009 3rd Annual IEEE Systems Conference, Vancouver, BC, Canada, 23–26 March 2009; pp. 23–26. [Google Scholar]
- Bemfica, J.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U. A three-fingered cable-driven gripper for underwater applications. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2469–2474. [Google Scholar]
- Catalano, M.G.; Grioli, G.; Farnioli, E.; Serio, A.; Piazza, C.; Bicchi, A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int. J. Robot. Res. 2014, 33, 768–782. [Google Scholar] [CrossRef] [Green Version]
- Stuart, H.S.; Wang, S.; Gardineer, B.; Christensen, D.L.; Aukes, D.M.; Cutkosky, M. A compliant underactuated hand with suction flow for underwater mobile manipulation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6691–6697. [Google Scholar]
- Stuart, H.; Wang, S.; Khatib, O.; Cutkosky, M.R. The ocean one hands: An adaptive design for robust marine manipulation. Int. J. Robot. Res. 2017, 36, 150–166. [Google Scholar] [CrossRef]
- Chocron, O.; Prieur, U.; Pino, L. A validated feasibility prototype for AUV reconfigurable magnetic coupling thruster. IEEE/ASME Trans. Mechatron. 2013, 19, 642–650. [Google Scholar] [CrossRef]
- Sinatra, N.; Ranzani, T.; Vlassak, J.; Parker, K.; Wood, R. Nanofiber-reinforced soft fluidic micro-actuators. J. Micromech. Microeng. 2018, 28, 084002. [Google Scholar] [CrossRef] [Green Version]
- Takeuchi, K.; Nomura, S.; Tamamoto, T.; Sakagami, N.; Koganezawa, K. Development of multi-joint gripper for underwater operations. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Navarro, S.E.; Marufo, M.; Ding, Y.; Puls, S.; Göger, D.; Hein, B.; Wörn, H. Methods for safe human-robot-interaction using capacitive tactile proximity sensors. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1149–1154. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Martinez-Hernandez, U.; Metta, G.; Dodd, T.J.; Prescott, T.J.; Natale, L.; Lepora, N.F. Active contour following to explore object shape with robot touch. In Proceedings of the 2013 World Haptics Conference (WHC), Daejeon, Korea, 14–17 April 2013; pp. 341–346. [Google Scholar]
- Fishel, J.A.; Loeb, G.E. Bayesian exploration for intelligent identification of textures. Front. Neurorobotics 2012, 6, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, K.C.; Perdereau, V. Fingertip force control based on max torque adjustment for dexterous manipulation of an anthropomorphic hand. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3557–3563. [Google Scholar]
- Liu, H.; Song, X.; Bimbo, J.; Althoefer, K.; Senerivatne, L. Intelligent fingertip sensing for contact information identification. In Advances in Reconfigurable Mechanisms and Robots I; Springer: New York, NY, USA, 2012; pp. 599–608. [Google Scholar]
- Dang, H.; Allen, P.K. Stable grasping under pose uncertainty using tactile feedback. Auton. Robot. 2014, 36, 309–330. [Google Scholar] [CrossRef]
- Song, X.; Liu, H.; Althoefer, K.; Nanayakkara, T.; Seneviratne, L.D. Efficient break-away friction ratio and slip prediction based on haptic surface exploration. IEEE Trans. Robot. 2013, 30, 203–219. [Google Scholar] [CrossRef] [Green Version]
- Teshigawara, S.; Tsutsumi, T.; Shimizu, S.; Suzuki, Y.; Ming, A.; Ishikawa, M.; Shimojo, M. Highly sensitive sensor for detection of initial slip and its application in a multi-fingered robot hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1097–1102. [Google Scholar]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Bao, R.; Tao, J.; Li, J.; Dong, M.; Pan, C. Recent progress in tactile sensors and their applications in intelligent systems. Sci. Bull. 2020, 65, 70–88. [Google Scholar] [CrossRef] [Green Version]
- Büscher, G.H.; Kõiva, R.; Schürmann, C.; Haschke, R.; Ritter, H.J. Flexible and stretchable fabric-based tactile sensor. Robot. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Seminara, L.; Capurro, M.; Cirillo, P.; Cannata, G.; Valle, M. Electromechanical characterization of piezoelectric PVDF polymer films for tactile sensors in robotics applications. Sensors Actuators Phys. 2011, 169, 49–58. [Google Scholar] [CrossRef]
- Goger, D.; Gorges, N.; Worn, H. Tactile sensing for an anthropomorphic robotic hand: Hardware and signal processing. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 895–901. [Google Scholar]
- Chuang, C.H.; Wang, M.S.; Yu, Y.C.; Mu, C.L.; Lu, K.F.; Lin, C.T. Flexible tactile sensor for the grasping control of robot fingers. In Proceedings of the 2013 International Conference on Advanced Robotics and Intelligent Systems, Tainan, Taiwan, 31 May–2 June 2013; pp. 141–146. [Google Scholar]
- Chuang, C.H.; Li, T.H.; Chou, I.C.; Teng, Y.J. Piezoelectric tactile sensor for submucosal tumor detection in endoscopy. Sens. Act. Phys. 2016, 244, 299–309. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M. Tactile sensing for robotic applications. In Sensors, Focus on Tactile, Force and Stress Sensors; IntechOpen: London, UK, 2008; pp. 298–304. Available online: https://www.intechopen.com/books/sensors-focus-on-tactile-force-and-stress-sensors/tactile_sensing_for_robotic_applications (accessed on 7 June 2021).
- Lee, H.K.; Chung, J.; Chang, S.I.; Yoon, E. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Micro. Syst. 2008, 17, 934–942. [Google Scholar]
- Schmitz, A.; Maiolino, P.; Maggiali, M.; Natale, L.; Cannata, G.; Metta, G. Methods and technologies for the implementation of large-scale robot tactile sensors. IEEE Trans. Robot. 2011, 27, 389–400. [Google Scholar] [CrossRef]
- Heyneman, B.; Cutkosky, M.R. Biologically inspired tactile classification of object-hand and object-world interactions. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 167–173. [Google Scholar]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible capacitive tactile sensor based on micropatterned dielectric layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C.F. A Highly Sensitive Flexible Capacitive Tactile Sensor with Sparse and High-Aspect-Ratio Microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, A.; Wurdemann, H.A.; Liu, H.; Seneviratne, L.D.; Althoefer, K. Magnetic resonance-compatible tactile force sensor using fiber optics and vision sensor. IEEE Sens. J. 2013, 14, 829–838. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Y.; Hao, J.; Yang, J.; Dong, E. Subtle Vibration Sensing and Dimension Measurement with a Bio-inspired Optical Tactile Sensor. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1248–1253. [Google Scholar]
- Alfadhel, A.; Khan, M.A.; de Freitas, S.C.; Kosel, J. Magnetic tactile sensor for braille reading. IEEE Sens. J. 2016, 16, 8700–8705. [Google Scholar] [CrossRef] [Green Version]
- Viola, F.A.; Spanu, A.; Ricci, P.C.; Bonfiglio, A.; Cosseddu, P. Ultrathin, flexible and multimodal tactile sensors based on organic field-effect transistors. Sci. Rep. 2018, 8, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Hua, Q.; Yu, R.; Zhang, Y.; Pan, C. Flexible, stretchable and wearable multifunctional sensor array as artificial electronic skin for static and dynamic strain mapping. Adv. Electron. Mater. 2015, 1, 1500142. [Google Scholar] [CrossRef]
- Li, R.; Adelson, E.H. Sensing and recognizing surface textures using a gelsight sensor. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1241–1247. [Google Scholar]
- Johnson, M.K.; Cole, F.; Raj, A.; Adelson, E.H. Microgeometry capture using an elastomeric sensor. ACM Trans. Graph. (TOG) 2011, 30, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M. Robotic Tactile Sensing: Technologies and System; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Azaman, N.I.L.; Ayub, M.A.; Ahmad, A.A. Characteristic and sensitivity of Quantum Tunneling Composite (QTC) material for tactile device applications. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016; pp. 7–11. [Google Scholar]
- De Oliveira, T.E.A.; Cretu, A.M.; Petriu, E.M. Multimodal bio-inspired tactile sensing module. IEEE Sens. J. 2017, 17, 3231–3243. [Google Scholar] [CrossRef]
- Hasegawa, H.; Mizoguchi, Y.; Tadakuma, K.; Ming, A.; Ishikawa, M.; Shimojo, M. Development of intelligent robot hand using proximity, contact and slip sensing. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 777–784. [Google Scholar]
- Segil, J.; Patel, R.; Klingner, J.; ff Weir, R.F.; Correll, N. Multi-modal prosthetic fingertip sensor with proximity, contact, and force localization capabilities. Adv. Mech. Eng. 2019, 11, 1687814019844643. [Google Scholar] [CrossRef] [Green Version]
- Kampmann, P.; Kirchner, F. Integration of fiber-optic sensor arrays into a multi-modal tactile sensor processing system for robotic end-effectors. Sensors 2014, 14, 6854–6876. [Google Scholar] [CrossRef]
- Din, S.; Xu, W.; Cheng, L.K.; Dirven, S. A stretchable multimodal sensor for soft robotic applications. IEEE Sens. J. 2017, 17, 5678–5686. [Google Scholar] [CrossRef]
- O’BRIEN, D.; Lane, D. Force and explicit slip sensing for the AMADEUS underwater gripper. Int. J. Syst. Sci. 1998, 29, 471–483. [Google Scholar] [CrossRef]
- Dennerlein, J.; Howe, R.; Shahoian, E.; Olroyd, C. Vibrotactile feedback for an underwater telerobot. Robotics and Applications. In Robotics and applications; Robotic and manufacturing systems recent results in research, development and applications International symposium, Proceedings of the Fourth Biannual World Automation Congress, Maui, HI, USA, 11–15 June 2000; TSI Enterprises, Inc.: San Antonio, TX, USA, 2000; pp. 244–249. [Google Scholar]
- Palli, G.; Moriello, L.; Scarcia, U.; Melchiorri, C. An intrinsic tactile sensor for underwater robotics. IFAC Proc. Vol. 2014, 47, 3364–3369. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, A.; Kampmann, P.; Lemburg, J.; Kirchner, F. Haptic Object Recognition in Underwater and Deep-sea Environments. J. Field Robot. 2015, 32, 167–185. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, W.; Gao, L.; Zhang, Y.; Tang, W. Design, analysis and experiment of a tactile force sensor for underwater dexterous hand intelligent grasping. Sensors 2018, 18, 2427. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muscolo, G.G.; Moretti, G.; Cannata, G. SUAS: A novel soft underwater artificial skin with capacitive transducers and Hyperelastic membrane. Robotica 2019, 37, 756–777. [Google Scholar] [CrossRef]
- Nadeau, P.; Abbott, M.; Melville, D.; Stuart, H.S. Tactile sensing based on fingertip suction flow for submerged dexterous manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3701–3707. [Google Scholar]
- Palli, G.; Moriello, L.; Melchiorri, C. Experimental evaluation of sealing materials in 6-axis force/torque sensors for underwater applications. In Proceedings of the International Conference on Computer Aided Systems Theory, Las Palmas de Gran Canaria, Spain, 8–13 February 2015; pp. 841–852. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [Green Version]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5. [Google Scholar] [CrossRef]
- Tadesse, Y.; Villanueva, A.; Haines, C.; Novitski, D.; Baughman, R.; Priya, S. Hydrogen-fuel-powered bell segments of biomimetic jellyfish. Smart Mater. Struct. 2012, 21, 045013. [Google Scholar] [CrossRef] [Green Version]
- Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A. Reversible bidirectional shape-memory polymers. Adv. Mater. 2013, 25, 4466–4469. [Google Scholar] [CrossRef] [PubMed]
- Yeom, S.W.; Oh, I.K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators. Smart Mater. Struct. 2009, 18, 085002. [Google Scholar] [CrossRef]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Imran, A.B.; Harun-Ur-Rashid, M.; Takeoka, Y. Polyrotaxane Actuators. In Soft Actuators; Springer: Berlin/Heidelberg, Germany, 2019; pp. 81–147. [Google Scholar]
- Christianson, C.; Bayag, C.; Li, G.; Jadhav, S.; Giri, A.; Agba, C.; Li, T.; Tolley, M.T. Jellyfish-Inspired Soft Robot Driven by Fluid Electrode Dielectric Organic Robotic Actuators. Front. Robot. AI 2019, 6, 126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, T.; Li, G.; Liang, Y.; Zhang, M.; Liu, B.; Wong, T.W.; Forman, J.; Chen, M.; Wang, G.; Tao, Y.; et al. Untethered soft robotic jellyfish. Smart Mater. Struct. 2018, 28, 015019. [Google Scholar] [CrossRef]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar]
- Champion, B.T.; Joordens, M.A. Underwater swarm robotics review. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 111–116. [Google Scholar]
| Name | References, Year | Actuation | Materials | Gripping Force | Diving Depth |
|---|---|---|---|---|---|
| OCTARM | [97], 2005 | Air | Elastomers | - | - |
| Octopus Robot | [98], 2011 | Motor Driven | Silicone | - | - |
| Three-fingered Gripper | [99], 2013 | Motor Driven | Silicon Skin | - | 100 m |
| Boa and Bellow Soft Grippers | [13], 2016 | Pressurized Fluid | Fiber- reinforced Elastomers | ∼2.2 kN | 800 m |
| Glove-Based Tele-operable Soft Hand | [85], 2018 | Hydraulics | Fiber- reinforced Elastomers | - | 2300 m |
| Bio-inspired Soft Arm | [90], 2018 | Air | Dragon Skin 30 | - | - |
| Soft Modular End-effector | [100], 2018 | Motor Driven | - | 150 N | ∼500 m |
| 3D-Printed Soft Manipulators | [101], 2018 | Hydraulics | Elastomers | ∼4 kN | 2224 m |
| Ultragentle Manipulator | [102], 2019 | Hydraulics | Nano-fiber Reinforced Silicone Matrix | ∼1 N | - |
| Octopus Arm Inspired Suckers | [103], 2020 | Air | Silicone Elastomer | ∼26.14 N | - |
| Sensing Technology | References, Year | Materials Used | Functionality | Applications |
|---|---|---|---|---|
| Employing strain gauge | [152], 1998 | PVDF | Force, and slip sensing | Artificial fingertip in UW environment |
| Piezo- electricity | [153], 2000 | Silicone rubber | Identifying hardness of different objects | Successfully recognized wood, machine wax, and aluminum in UW environment |
| Optical | [154], 2014 | Silicone rubber | Force, and torque sensing | Three fingered hand- like end- effector |
| Fiber- optic | [155], 2015 | - | Contact force, and haptic object recognition | Hydraulic gripper: SeaGrip |
| Piezo- resistance | [156], 2018 | Silicon, silicon cup, silicone oil, etc | Force sensing | Dexterous robotic hand in UW environment |
| Capacitance | [157], 2019 | Polyvinyl chloride, Silicone, etc | Force sensing (magnitude, and position) | AUV |
| Finger tip suction flow | [158], 2020 | - | Contact information | AUV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Subad, R.A.S.I.; Cross, L.B.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356-382. https://doi.org/10.3390/applmech2020021
Subad RASI, Cross LB, Park K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Applied Mechanics. 2021; 2(2):356-382. https://doi.org/10.3390/applmech2020021
Chicago/Turabian StyleSubad, Rafsan Al Shafatul Islam, Liam B. Cross, and Kihan Park. 2021. "Soft Robotic Hands and Tactile Sensors for Underwater Robotics" Applied Mechanics 2, no. 2: 356-382. https://doi.org/10.3390/applmech2020021
APA StyleSubad, R. A. S. I., Cross, L. B., & Park, K. (2021). Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Applied Mechanics, 2(2), 356-382. https://doi.org/10.3390/applmech2020021