Geo-Statistics and Deep Learning-Based Algorithm Design for Real-Time Bus Geo-Location and Arrival Time Estimation Features with Load Resiliency Capacity


Abstract
1. Introduction
2. Literature Review
2.1. Passenger Flow Prediction
2.2. Travel Time and Location Prediction
2.3. Optimization and Scheduling
2.4. Challenges and Future Directions
3. Material and Methods
3.1. Bus Activity Management Software Components
3.2. Bus Data Collector
3.2.1. Dataset Descriptive Statistics
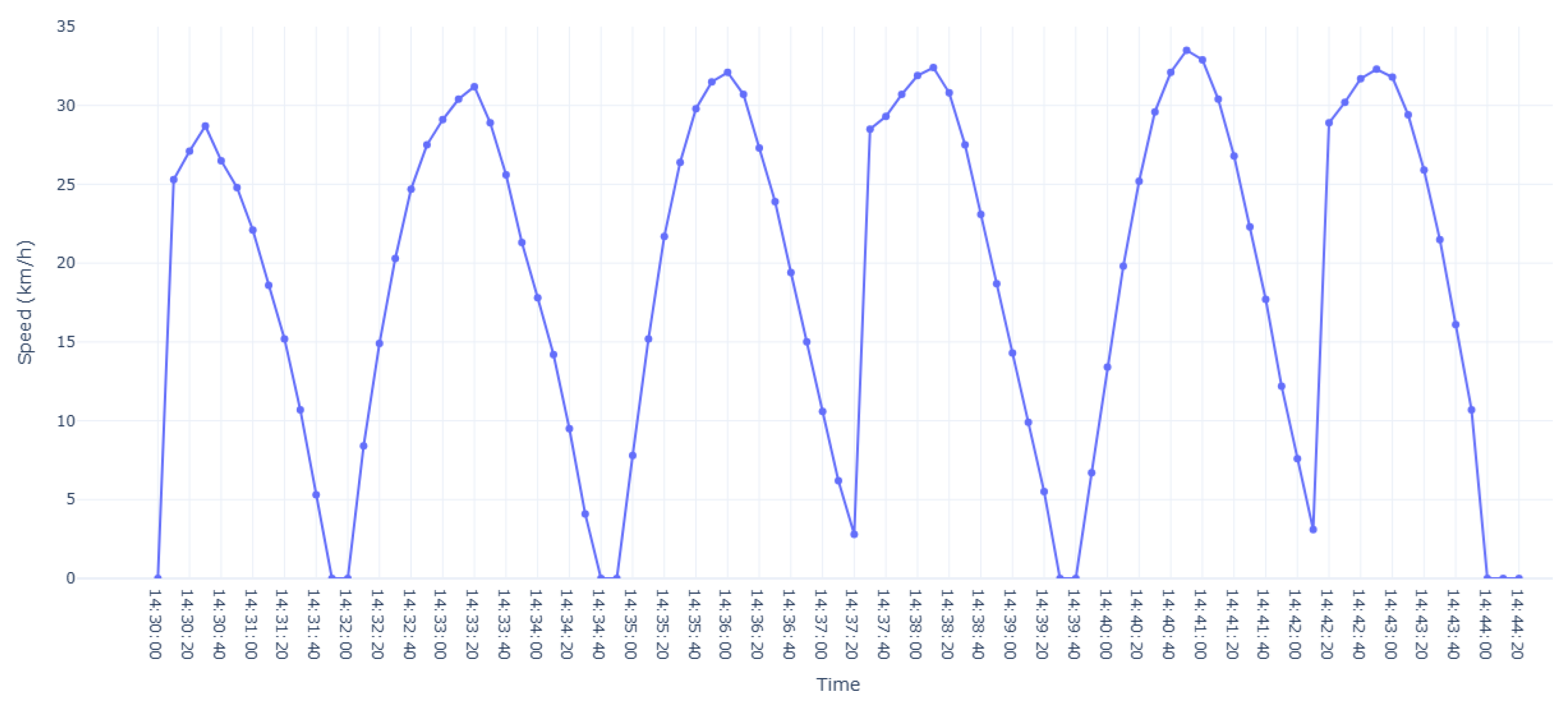
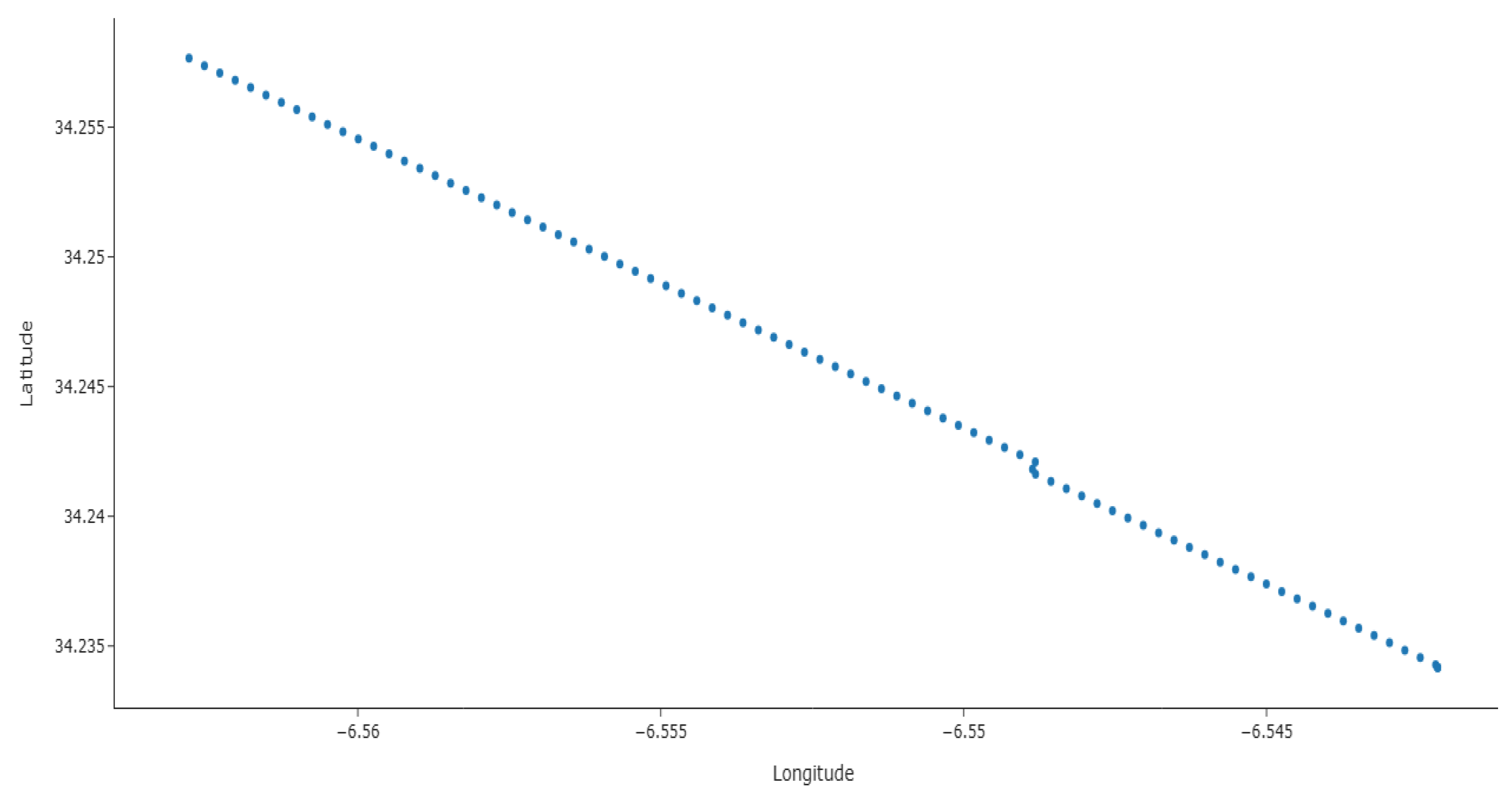
3.2.2. Data Visualization
3.3. Speed Confidence Interval Estimation
3.3.1. Average and Variance Speed Calculation
3.3.2. Confidence Interval Construction
3.3.3. Remaining Time to Arrival Estimation
3.4. Cost-Effective LSTM-Based Predictive Geo-Location Approach
3.4.1. Data Transmission Protocol
3.4.2. Reconstruction of Missing Data with LSTM Network
3.4.3. LSTM Network Settings
4. Results and Discussions
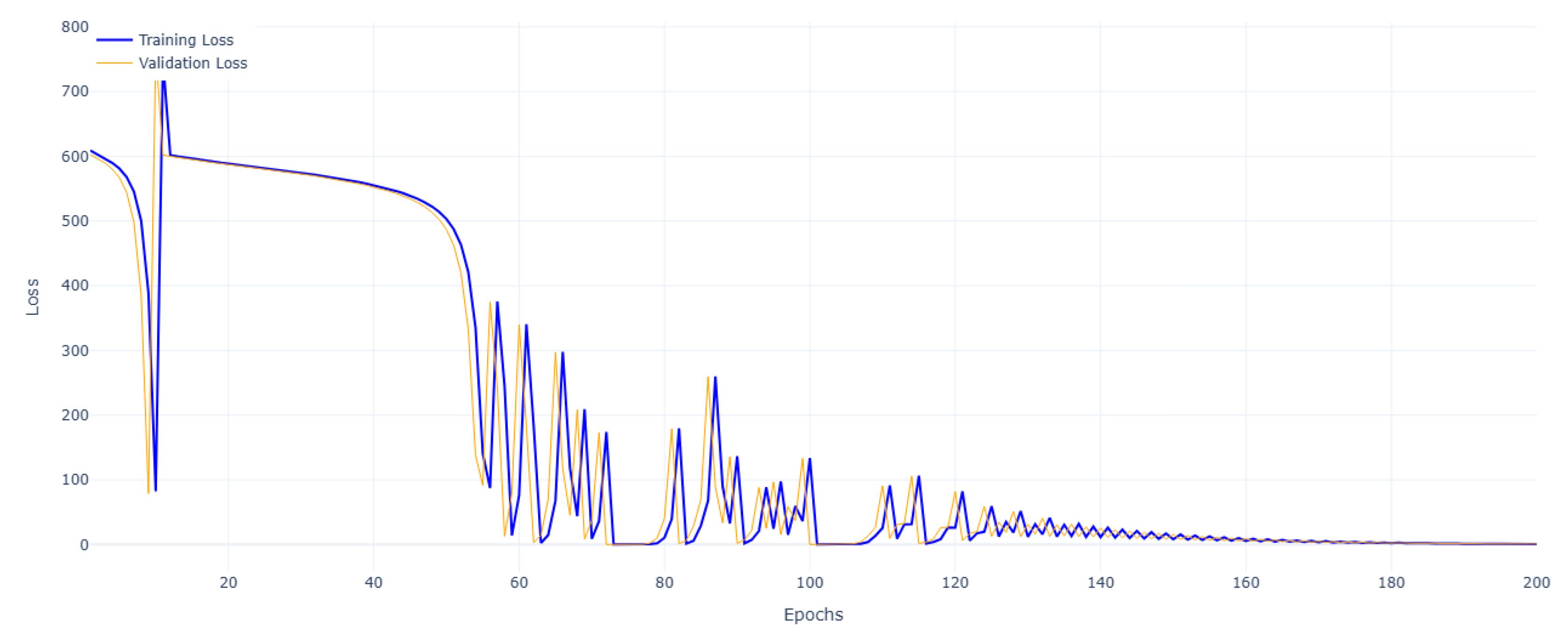
4.1. Network Training and Validation Loss Evolution
4.2. Practical Use of Developments
5. Conclusions and Perspectives
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DNN | Deep Neural Network |
| GPS | Global Positioning System |
| IoT | Internet of Things |
| ITS | Intelligent Transport System |
| LSTM | Long-Short Term Memory |
| MaaS | Mobility-as-a-Service |
| NPS | Network Planning System |
| OSS | Operating System |
| PIS | Passengers Information System |
| RNN | Recurrent Neural Network |
| UAV | Unmanned Aerial Vehicle |
Appendix A. Synthetic Dataset
| Measure Index | Timestamp | Latitude | Longitude | Speed (Km/h) |
| 0 | 13 June 2025 14:30:00 | 34.257655 | −6.562787 | 0.0 |
| 1 | 13 June 2025 14:30:10 | 34.257372 | −6.562533 | 25.3 |
| 2 | 13 June 2025 14:30:20 | 34.257089 | −6.562279 | 27.1 |
| 3 | 13 June 2025 14:30:30 | 34.256806 | −6.562025 | 28.7 |
| 4 | 13 June 2025 14:30:40 | 34.256523 | −6.561771 | 26.5 |
| 5 | 13 June 2025 14:30:50 | 34.256240 | −6.561517 | 24.8 |
| 6 | 13 June 2025 14:31:00 | 34.255957 | −6.561263 | 22.1 |
| 7 | 13 June 2025 14:31:10 | 34.255674 | −6.561009 | 18.6 |
| 8 | 13 June 2025 14:31:20 | 34.255391 | −6.560755 | 15.2 |
| 9 | 13 June 2025 14:31:30 | 34.255108 | −6.560501 | 10.7 |
| 10 | 13 June 2025 14:31:40 | 34.254825 | −6.560247 | 5.3 |
| 11 | 13 June 2025 14:31:50 | 34.254542 | −6.559993 | 0.0 |
| 12 | 13 June 2025 14:32:00 | 34.254259 | −6.559739 | 0.0 |
| 13 | 13 June 2025 14:32:10 | 34.253976 | −6.559485 | 8.4 |
| 14 | 13 June 2025 14:32:20 | 34.253693 | −6.559231 | 14.9 |
| 15 | 13 June 2025 14:32:30 | 34.253410 | −6.558977 | 20.3 |
| 16 | 13 June 2025 14:32:40 | 34.253127 | −6.558723 | 24.7 |
| 17 | 13 June 2025 14:32:50 | 34.252844 | −6.558469 | 27.5 |
| 18 | 13 June 2025 14:33:00 | 34.252561 | −6.558215 | 29.1 |
| 19 | 13 June 2025 14:33:10 | 34.252278 | −6.557961 | 30.4 |
| 20 | 13 June 2025 14:33:20 | 34.251995 | −6.557707 | 31.2 |
| 21 | 13 June 2025 14:33:30 | 34.251712 | −6.557453 | 28.9 |
| 22 | 13 June 2025 14:33:40 | 34.251429 | −6.557199 | 25.6 |
| 23 | 13 June 2025 14:33:50 | 34.251146 | −6.556945 | 21.3 |
| 24 | 13 June 2025 14:34:00 | 34.250863 | −6.556691 | 17.8 |
| 25 | 13 June 2025 14:34:10 | 34.250580 | −6.556437 | 14.2 |
| 26 | 13 June 2025 14:34:20 | 34.250297 | −6.556183 | 9.5 |
| 27 | 13 June 2025 14:34:30 | 34.250014 | −6.555929 | 4.1 |
| 28 | 13 June 2025 14:34:40 | 34.249731 | −6.555675 | 0.0 |
| 29 | 13 June 2025 14:34:50 | 34.249448 | −6.555421 | 0.0 |
| 30 | 13 June 2025 14:35:00 | 34.249165 | −6.555167 | 7.8 |
| 31 | 13 June 2025 14:35:10 | 34.248882 | −6.554913 | 15.2 |
| 32 | 13 June 2025 14:35:20 | 34.248599 | −6.554659 | 21.7 |
| 33 | 13 June 2025 14:35:30 | 34.248316 | −6.554405 | 26.4 |
| 34 | 13 June 2025 14:35:40 | 34.248033 | −6.554151 | 29.8 |
| 35 | 13 June 2025 14:35:50 | 34.247750 | −6.553897 | 31.5 |
| 36 | 13 June 2025 14:36:00 | 34.247467 | −6.553643 | 32.1 |
| 37 | 13 June 2025 14:36:10 | 34.247184 | −6.553389 | 30.7 |
| 38 | 13 June 2025 14:36:20 | 34.246901 | −6.553135 | 27.3 |
| 39 | 13 June 2025 14:36:30 | 34.246618 | −6.552881 | 23.9 |
| 40 | 13 June 2025 14:36:40 | 34.246335 | −6.552627 | 19.4 |
| 41 | 13 June 2025 14:36:50 | 34.246052 | −6.552373 | 15.0 |
| 42 | 13 June 2025 14:37:00 | 34.245769 | −6.552119 | 10.6 |
| 43 | 13 June 2025 14:37:10 | 34.245486 | −6.551865 | 6.2 |
| ... | ... | ... | ... | ... |
| 85 | 13 June 2025 14:44:00 | 34.234180 | −6.542176 | 0.0 |
| 86 | 13 June 2025 14:44:10 | 34.234180 | −6.542176 | 0.0 |
| 87 | 13 June 2025 14:44:20 | 34.234180 | −6.542176 | 0.0 |
Appendix B. LSTM Mechanism
Appendix C. Bus Trajectory Visualization

Appendix D. Mathematical Notations Overview
| Symbol | Significance |
| Used dataset format having N observations | |
| Speed average on the day d and hour h | |
| Speed standard deviation on the day d and hour h | |
| Confidence interval expression for arrival time |
References
- Ouyang, Q.; Lv, Y.; Ma, J.; Li, J. An LSTM-Based Method Considering History and Real-Time Data for Passenger Flow Prediction. Appl. Sci. 2020, 10, 3788. [Google Scholar] [CrossRef]
- Abduljabbar, R.; Dia, H.; Tsai, P.W.; Liyanage, S. Short-Term Traffic Forecasting: An LSTM Network for Spatial-Temporal Speed Prediction. Future Transp. 2021, 1, 21–37. [Google Scholar] [CrossRef]
- Yuan, Y.; Shao, C.; Cao, Z.; He, Z.; Zhu, C.; Wang, Y.; Jang, V. Bus Dynamic Travel Time Prediction: Using a Deep Feature Extraction Framework Based on RNN and DNN. Electronics 2020, 9, 1876. [Google Scholar] [CrossRef]
- Lee, C.; Yoon, Y. A Novel Bus Arrival Time Prediction Method Based on Spatio-Temporal Flow Centrality Analysis and Deep Learning. Electronics 2022, 11, 1875. [Google Scholar] [CrossRef]
- Du, Y.; Wang, C.; Qiao, Y.; Zhao, D.; Guo, W. A geographical location prediction method based on continuous time series Markov model. PLoS ONE 2018, 13, e0207063. [Google Scholar] [CrossRef] [PubMed]
- Yin, Z.; Wang, B.; Zhang, B.; Shen, X. Prediction Intervals for Bus Travel Time Based on Road Segment Sharing, Multiple Routes’ Driving Style Similarity, and Bootstrap Method. Appl. Sci. 2024, 14, 2935. [Google Scholar] [CrossRef]
- Rashvand, N.; Hosseini, S.S.; Azarbayjani, M.; Tabkhi, H. Real-Time Bus Departure Prediction Using Neural Networks for Smart IoT Public Bus Transit. IoT 2024, 5, 650–665. [Google Scholar] [CrossRef]
- Meloni, I.; Musolino, G.; Piras, F.; Rindone, C.; Russo, F.; Sottile, E.; Vitetta, A. Mobility as a Service: Insights from pilot studies across different Italian settings. Transp. Eng. 2024, 18, 100294. [Google Scholar] [CrossRef]
- Vitetta, A. Sustainable Mobility as a Service: Framework and Transport System Models. Information 2022, 13, 346. [Google Scholar] [CrossRef]
- Zhou, Y.; Tang, D.; Zhou, H.; Xiang, X. Moving Target Geolocation and Trajectory Prediction Using a Fixed-Wing UAV in Cluttered Environments. Remote Sens. 2025, 17, 969. [Google Scholar] [CrossRef]
- Chekol, A.G.; Fufa, M.S. A survey on next location prediction techniques, applications, and challenges. EURASIP J. Wirel. Commun. Netw. 2022, 2022, 29. [Google Scholar] [CrossRef]
- Xiao, Y.; Nian, Q. Vehicle Location Prediction Based on Spatiotemporal Feature Transformation and Hybrid LSTM Neural Network. Information 2020, 11, 84. [Google Scholar] [CrossRef]
- Song, H.Y. A future location prediction method based on lightweight LSTM with hyperparamater optimization. Sci. Rep. 2023, 13, 17928. [Google Scholar] [CrossRef] [PubMed]
- Stojković, P.; Tadić, P. Object Location Prediction in Real-time using LSTM Neural Network and Polynomial Regression. arXiv 2023, arXiv:2311.13950. [Google Scholar] [CrossRef]
- Nawaz, A.; Huang, Z.; Wang, S.; Akbar, A.; AlSalman, H.; Gumaei, A. GPS Trajectory Completion Using End-to-End Bidirectional Convolutional Recurrent Encoder-Decoder Architecture with Attention Mechanism. Sensors 2020, 20, 5143. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Cao, H.; Cao, K.; Zou, L.; Zhu, L. Considering the Optimization Design of Urban Bus Network Scheduling. Appl. Sci. 2024, 14, 6337. [Google Scholar] [CrossRef]
- Gemma, A.; Cipriani, E.; Crisalli, U.; Mannini, L.; Petrelli, M. A Bus Network Design Model under Demand Variation: A Case Study of the Management of Rome’s Bus Network. Sustainability 2024, 16, 803. [Google Scholar] [CrossRef]
- Rosca, C.M.; Stancu, A.; Neculaiu, C.F.; Gortoescu, I.A. Designing and Implementing a Public Urban Transport Scheduling System Based on Artificial Intelligence for Smart Cities. Appl. Sci. 2024, 14, 8861. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistic | Speed (km/h) | Latitude | Longitude |
|---|---|---|---|
| Mean | 19.160920 | 34.245540 | −6.552059 |
| Standard Deviation | 10.979964 | 0.007078 | 0.006190 |
| Minimum | 0.000000 | 34.234180 | −6.562787 |
| Maximum | 33.500000 | 34.257655 | −6.542176 |
| Layer (Type) | Output Shape | Params Number |
|---|---|---|
| Lstm (LSTM) | (None, 50) | 10,800 |
| Dense (Dense) | (None, 1000) | 51,000 |
| Dense (Dense) | (None, 1000) | 1,001,000 |
| Dense (Dense) | (None, 1000) | 1,001,000 |
| Dense (Dense) | (None, 1000) | 1,001,000 |
| Dense (Dense) | (None, 1000) | 1,001,000 |
| Dense (Dense) | (None, 1000) | 1,001,000 |
| Dense (Dense) | (None, 1000) | 51,000 |
| Dense (Dense) | (None, 2) | 102 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tigani, S. Geo-Statistics and Deep Learning-Based Algorithm Design for Real-Time Bus Geo-Location and Arrival Time Estimation Features with Load Resiliency Capacity. AI 2025, 6, 142. https://doi.org/10.3390/ai6070142
Tigani S. Geo-Statistics and Deep Learning-Based Algorithm Design for Real-Time Bus Geo-Location and Arrival Time Estimation Features with Load Resiliency Capacity. AI. 2025; 6(7):142. https://doi.org/10.3390/ai6070142
Chicago/Turabian StyleTigani, Smail. 2025. "Geo-Statistics and Deep Learning-Based Algorithm Design for Real-Time Bus Geo-Location and Arrival Time Estimation Features with Load Resiliency Capacity" AI 6, no. 7: 142. https://doi.org/10.3390/ai6070142
APA StyleTigani, S. (2025). Geo-Statistics and Deep Learning-Based Algorithm Design for Real-Time Bus Geo-Location and Arrival Time Estimation Features with Load Resiliency Capacity. AI, 6(7), 142. https://doi.org/10.3390/ai6070142