
FASTSeg3D: A Fast, Efficient, and Adaptive Ground Filtering Algorithm for 3D Point Clouds in Mobile Sensing Applications



Abstract
1. Introduction
- A range elevation estimation (REE) technique for fast organization of 3D point clouds, filtering of outliers, and estimation of terrain heights
- A window-based model fitting (WBMF) technique to adaptively address the over-segmentation problem and greatly reduce the number of false-positive segmented regions without compromising real-time filtering.
- A fast and adaptable ground filtering/segmentation algorithm (FASTSeg3D) for efficient organization, filtering/segmentation of ground and non-ground points within 3D point clouds in real time.
2. Related Works
2.1. Reference Ground Surface Filtering
2.2. Elevation Differences Filtering
2.3. Morphological Operations Filtering
3. Methods
3.1. Problem Definition
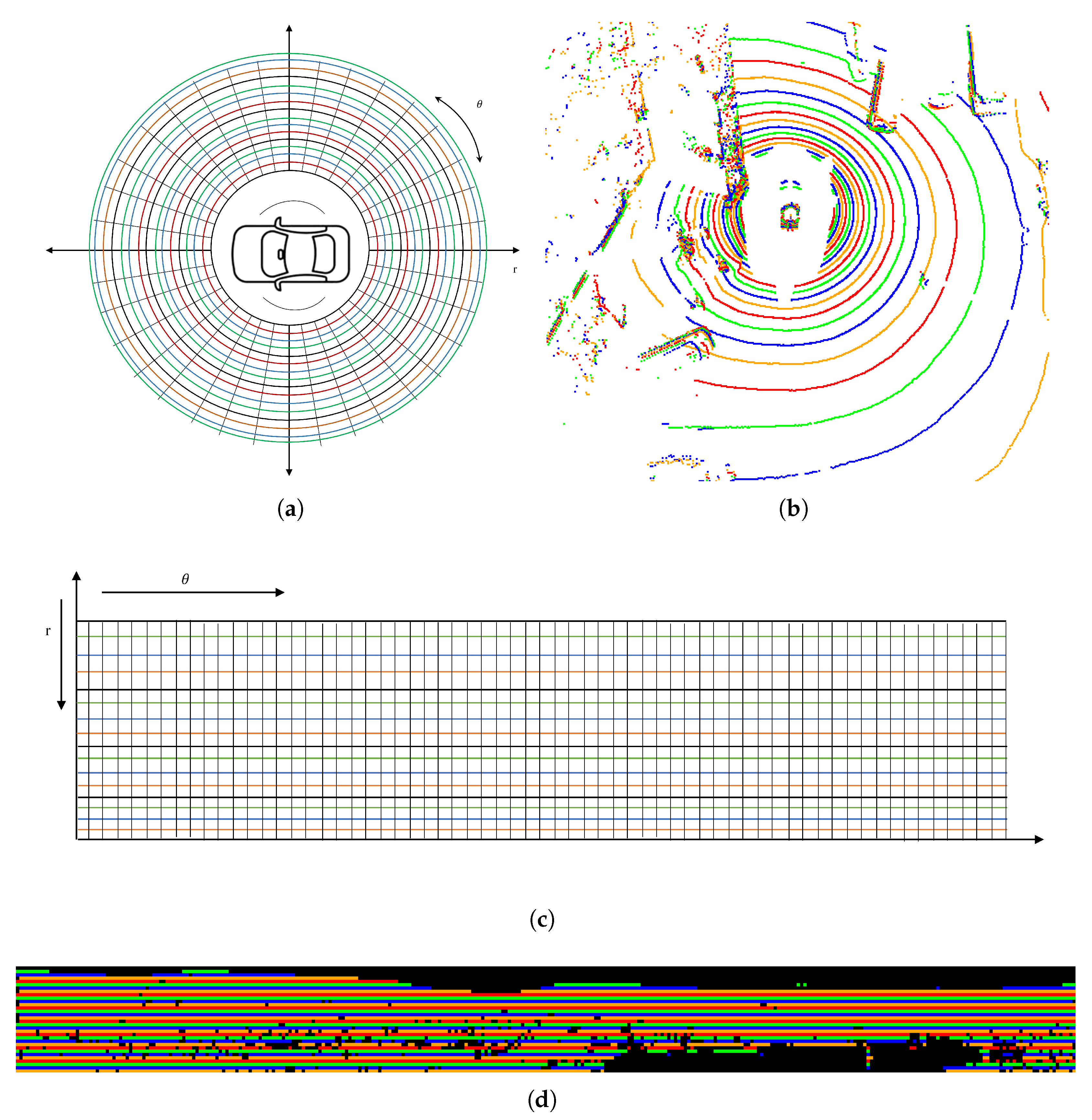
3.2. FastSeg3D: Point Cloud Data Representation
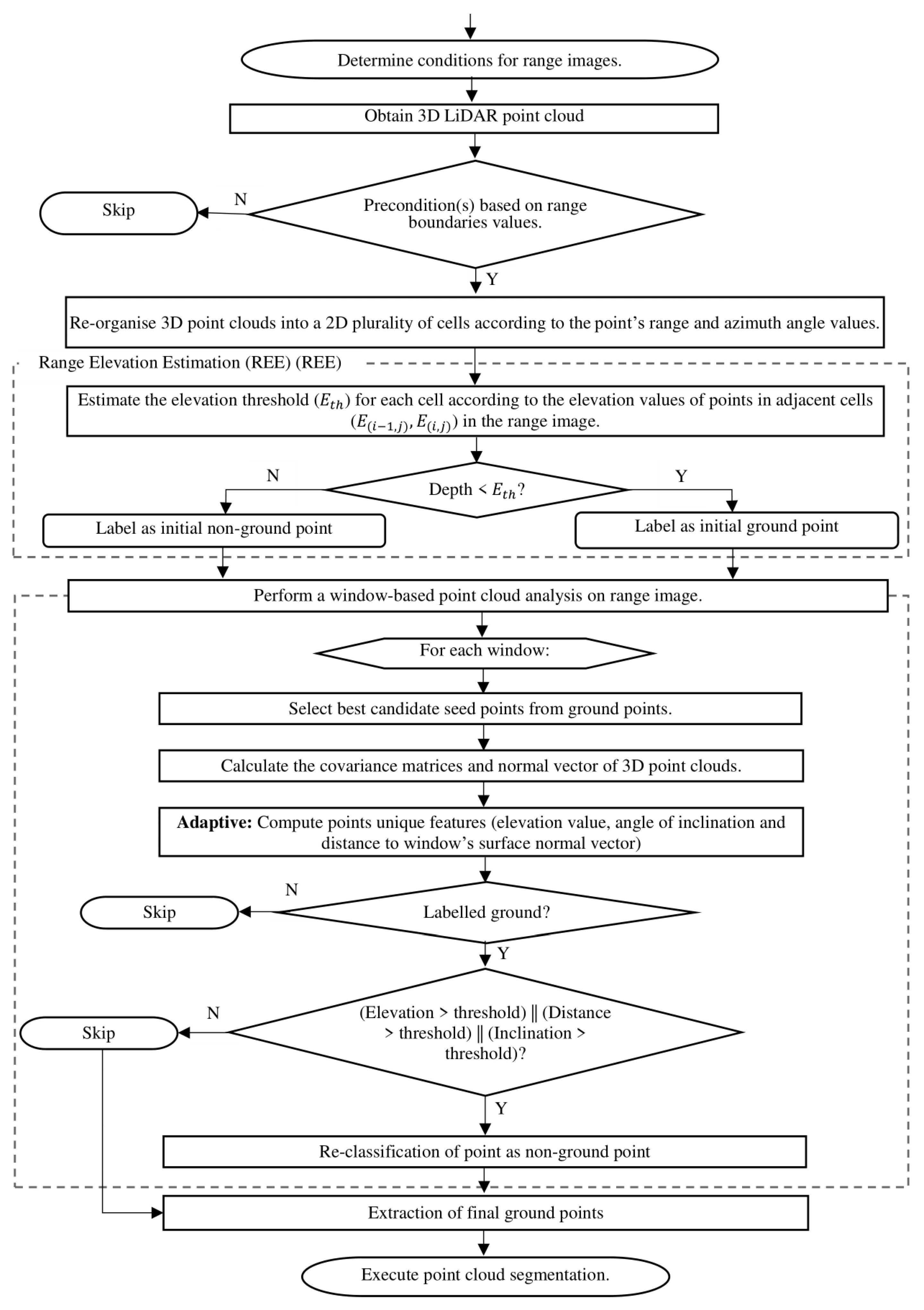
3.3. Algorithm 1: Range Elevation Estimation (REE)
| Algorithm 1 Coarse segmentation (REE) |
| Input: raw point cloud |
| Output: coarsely segmented ground/non-ground labels |
| Parameters: |
| i. : elevation tolerance (default: ) |
| ii. : maximum LiDAR range (default: ) |
| iii. Angular resolution |
| 1: Initialize 2D range image with dimensions |
| 2: for each in cloud P do |
| 3: Compute range ; |
| 4: Compute azimuth ; |
| 5: Map to cell in ; |
| 6: end for |
| 7: for each row r in do |
| 8: Compute minimum elevation ; |
| 9: ; |
| 10: if then |
| 11: ; |
| 12: else |
| 13: ; |
| 14: end if |
| 15: Label points in cell ; |
| 16: if ; then |
| 17: label as non-ground: ; |
| 18: else |
| 19: label as ground: ; |
| 20: end if |
| 21: end for |
| 22: Return labelled point cloud; |
3.4. Algorithm 2: Window-Based Model Fitting (WBMF)
| Algorithm 2 Window-based model fitting (WBMF) |
| Input: coarsely labelled point cloud from REE image, |
| Output: refined ground/non-ground labels |
| Parameters: |
| i. W: window size |
| ii. : elevation tolerance (default: ) |
| iii. Window dimensions , (for grid) |
| iv. Slope threshold , distance threshold , elevation threshold |
| v. Min/max seed points per window: |
| vi. : candidate ground points, where k represents candidate points for |
| vii. NOTE: 0 indicates ground label, and 1 indicates non-ground. |
| 1: Divide 2D range image into sliding windows of size |
| 2: for each window in do |
| 3: Select candidate ground seeds with lowest elevation in |
| 4: Compute covariance matrix M of : |
| 5: , where |
| 6: Perform PCA on M to compute normal vector |
| 7: if then |
| 8: for each point in do |
| 9: Compute distance to plane: |
| 10: Compute inclination angle: |
| 11: if OR OR then |
| 12: Reclassify as non-ground: |
| 13: end if |
| 14: end for |
| 15: else |
| 16: add to |
| 17: end if |
| 18: end for |
| 19: Return refined labels |
4. Results and Discussion
4.1. Experimental Setup
4.2. Experimental Parameters
4.3. Evaluation Metrics
4.4. Comparative Methods
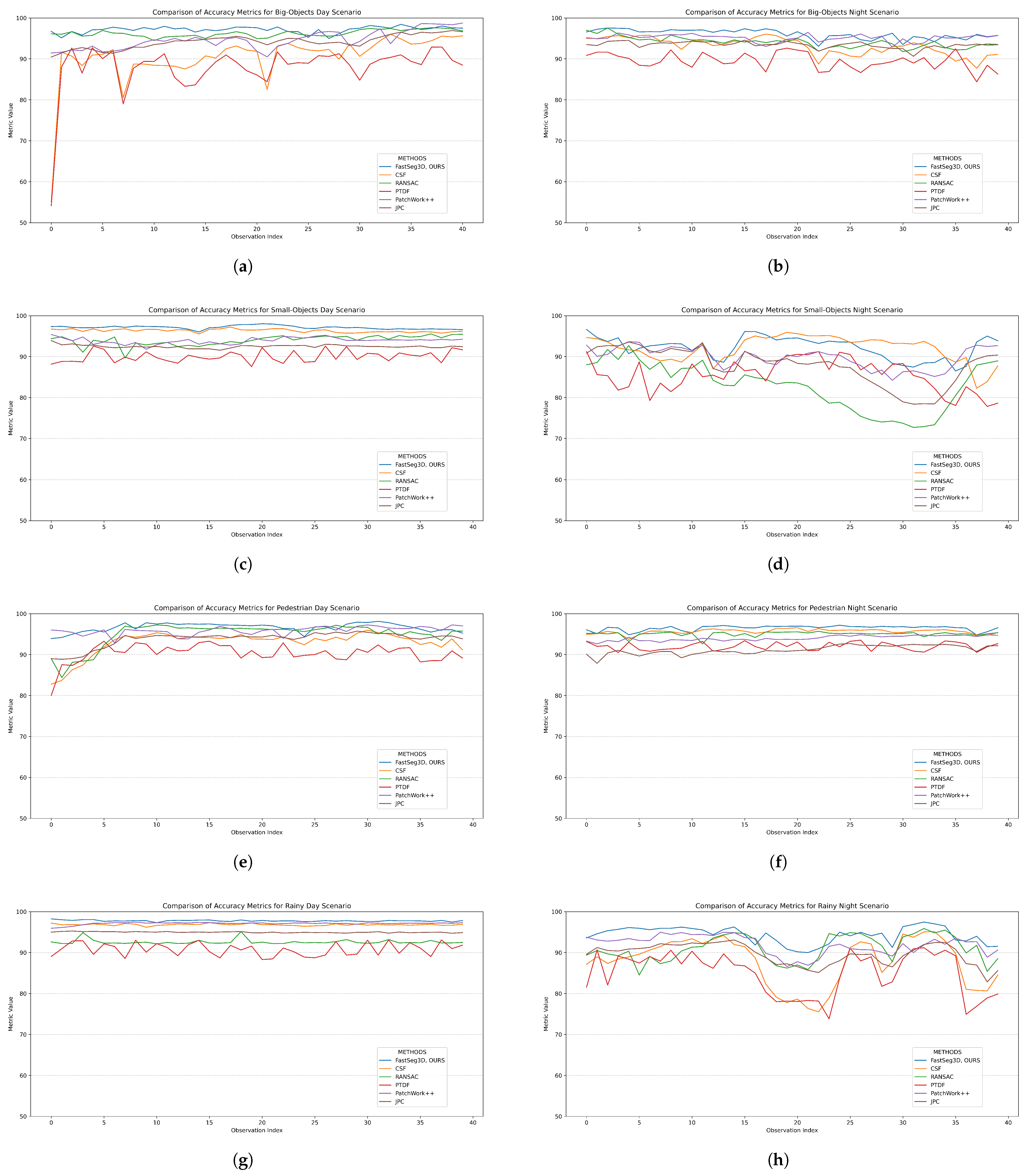
- LiDAR sensor noise: Rain droplets introduce false returns, increasing outliers below the true ground elevation. At night, reduced ambient light exacerbates noise in low-reflectivity regions (e.g., wet asphalt).
- Sparse ground points: In dense traffic/rainy scenes, ground regions are occluded, leading to sparsity. REE’s elevation threshold () struggles to distinguish ground from low-lying noise (e.g., puddles, tire splashes).
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| REE | Range elevation estimation |
| WBMF | Window-based model fitting |
| PCA | Principal component analysis |
| SLAM | Simultaneous localization and mapping |
| 3D | Three-dimensional |
| LiDAR | Light Detection and Ranging |
| MLS | Mobile laser scanner |
| DTM | Digital Terrain Model |
| DSM | Digital Surface Model |
| RANSAC | Random sample consensus |
| GPR | Gaussian process regression |
| RLWR | Robust locally weighted regression |
| MCC | Multi-scale curvature classification |
| TPS | Thin-plate spline |
| TIN | Triangulated irregular network |
| PTDF | Progressive TIN Densification Filtering |
| CSF | Cloth Simulation Filtering |
| CRF | Conditional Random Field |
| MRF | Markov Random Field |
| PCD | Point cloud data |
| PMF | Progressive morphological filters |
| SMRF | Simple morphological filter |
| DMPs | Differential morphological profiles |
| bobj | Big-object and dense-traffic scenarios |
| sobj | Small-object and dense-traffic scenarios |
| ped | Pedestrian and dense-traffic scenarios |
| rainy | Rainy scenes with busy traffic |
Appendix A
Appendix A.1. Algorithm 1: REE
Appendix A.2. Algorithm 2: WBMF
- : slopes rarely corresponded to drivable surfaces in urban settings [84].
References
- Pendleton, S.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.; Rus, D.; Ang, M. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Roy, A.; Todorovic, S. Monocular Depth Estimation Using Neural Regression Forest. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 5506–5514. [Google Scholar]
- Saxena, A.; Schulte, J.; Ng, A. Depth Estimation using Monocular and Stereo Cues. In IJCAI’07, Proceedings of the 20th International Joint Conference on Artificial Intelligence, Nagoya, Japan, 6–12 January 2007; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2007; pp. 2197–2203. [Google Scholar]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection—Approaches and applications. ISPRS J. Photogramm. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef]
- Shan, J. Topographic Laser Ranging and Scanning, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Nguyen, A.; Le, B. 3D point cloud segmentation: A survey. In Proceedings of the 2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Phillippines, 12–15 November 2013; pp. 225–230. [Google Scholar] [CrossRef]
- Xie, Y.; Tian, J.; Zhu, X. Linking Points With Labels in 3D: A Review of Point Cloud Semantic Segmentation. IEEE Geosci. Remote Sens. Mag. 2019, 8, 38–59. [Google Scholar] [CrossRef]
- Jozdani, S.; Chen, D.; Pouliot, D.; Alan Johnson, B. A review and meta-analysis of Generative Adversarial Networks and their applications in remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102734. [Google Scholar] [CrossRef]
- Lim, J.; Santinelli, G.; Dahal, A.; Vrieling, A.; Lombardo, L. An ensemble neural network approach for space–time landslide predictive modelling. Int. J. Appl. Earth Obs. Geoinf. 2024, 132, 104037. [Google Scholar] [CrossRef]
- Qin, N.; Tan, W.; Guan, H.; Wang, L.; Ma, L.; Tao, P.; Fatholahi, S.; Hu, X.; Li, J. Towards intelligent ground filtering of large-scale topographic point clouds: A comprehensive survey. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103566. [Google Scholar] [CrossRef]
- Garnelo, M.; Shanahan, M. Reconciling deep learning with symbolic artificial intelligence: Representing objects and relations. Curr. Opin. Behav. Sci. 2019, 29, 17–23. [Google Scholar] [CrossRef]
- Poux, F.; Billen, R. Voxel-based 3D Point Cloud Semantic Segmentation: Unsupervised Geometric and Relationship Featuring vs Deep Learning Methods. ISPRS Int. J. Geo-Inf. 2019, 8, 213. [Google Scholar] [CrossRef]
- Poux, F.d.L.U.; Mattes, C.; Kobbelt, L. Unsupervised segmentation of indoor 3D point cloud: Application to object-based classification. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 44, 111–118. [Google Scholar] [CrossRef]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C. From LiDAR point cloud towards digital twin city: Clustering city objects based on Gestalt principles. ISPRS J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Chen, Z.; Deng, L.; Luo, Y.; Li, D.; Marcato Junior, J.; Nunes Gonçalves, W.; Awal Md Nurunnabi, A.; Li, J.; Wang, C.; Li, D. Road extraction in remote sensing data: A survey. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102833. [Google Scholar] [CrossRef]
- Xiao, W.; Cao, H.; Tang, M.; Zhang, Z.; Chen, N. 3D urban object change detection from aerial and terrestrial point clouds: A review. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103258. [Google Scholar] [CrossRef]
- Chen, T.; Dai, B.; Liu, D.; Song, J. Sparse Gaussian process regression based ground segmentation for autonomous land vehicles. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 3993–3998. [Google Scholar] [CrossRef]
- Fischler, M.; Bolles, R. Random sample consensus. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Advanced DTM generation from LIDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 23–30. [Google Scholar]
- Pfeifer, N.; Reiter, T.; Briese, C.; Rieger, W. Interpolation of high quality ground models from laser scanner data in forested areas. Int. Arch. Photogramm. Remote Sens. 1999, 32, 31–36. [Google Scholar]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Dai, W.; Kan, H.; Tan, R.; Yang, B.; Guan, Q.; Zhu, N.; Xiao, W.; Dong, Z. Multisource forest point cloud registration with semantic-guided keypoints and robust RANSAC mechanisms. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103105. [Google Scholar] [CrossRef]
- Diaz, N.; Gallo, O.; Caceres, J.; Porras, H. Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS). Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102629. [Google Scholar] [CrossRef]
- Ji, X.; Yang, B.; Tang, Q.; Xu, W.; Li, J. Feature fusion-based registration of satellite images to airborne LiDAR bathymetry in island area. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102778. [Google Scholar] [CrossRef]
- Chen, T.; Dai, B.; Wang, R.; Liu, D. Gaussian-Process-Based Real-Time Ground Segmentation for Autonomous Land Vehicles. J. Intell. Robot. Syst. 2013, 76, 563–582. [Google Scholar] [CrossRef]
- Liu, K.; Wang, W.; Tharmarasa, R.; Wang, J.; Zuo, Y. Ground surface filtering of 3D point clouds based on hybrid regression technique. IEEE Access 2019, 7, 23270–23284. [Google Scholar] [CrossRef]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast segmentation of 3D point clouds: A paradigm on LiDAR data for autonomous vehicle applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5067–5073. [Google Scholar] [CrossRef]
- Briese, C.; Pfeifer, N.; Stadler, P. Derivation of Digital Terrain Models in the SCOP++ Environment. In Proceedings of the OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Digital Elevation Models, Stockholm, Sweden, 1–3 March 2001; p. 13. [Google Scholar]
- Evans, J.; Hudak, A. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Mongus, D.; Žalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar] [CrossRef]
- Hu, H.; Ding, Y.; Zhu, Q.; Wu, B.; Lin, H.; Du, Z.; Zhang, Y.; Zhang, Y. An adaptive surface filter for airborne laser scanning point clouds by means of regularization and bending energy. ISPRS J. Photogramm. Remote Sens. 2014, 92, 98–111. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Huang, X.; Wan, Y.; Zhang, Y.; Wang, S. Terrain-Adaptive Ground Filtering of Airborne LiDAR Data Based on Saliency-Aware Thin Plate Spline. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2, 279–285. [Google Scholar] [CrossRef]
- Qin, L.; Wu, W.; Tian, Y.; Xu, W. LiDAR Filtering of Urban Areas with Region Growing Based on Moving-Window Weighted Iterative Least-Squares Fitting. IEEE Geosci. Remote Sens. Lett. 2017, 14, 841–845. [Google Scholar] [CrossRef]
- Adams, R.; Bischof, L. Seeded Region Growing. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 641–647. [Google Scholar] [CrossRef]
- Hojjatoleslami, S.; Kittler, J. Region growing: A new approach. IEEE Trans. Image Process. 1998, 7, 1079–1084. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Wang, H.; Zhang, H.; Sun, M.; Liu, X. A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas. Remote Sens. 2016, 8, 71. [Google Scholar] [CrossRef]
- Dong, Y.; Cui, X.; Zhang, L.; Ai, H. An improved progressive TIN densification filtering method considering the density and standard variance of point clouds. ISPRS Int. J. Geo-Inf. 2018, 7, 409. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Elmqvist, M. Ground surface estimation from airborne laser scanner data using active shape models 1.1. Int. Arch. Photogramm. Remote Sens. (ISPRS) 2002, 34, 114–118. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Dakin Kuiper, S.; Coops, N.; Jarron, L.; Tompalski, P.; White, J. An automated approach to detecting instream wood using airborne laser scanning in small coastal streams. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103272. [Google Scholar] [CrossRef]
- Hillman, S.; Wallace, L.; Lucieer, A.; Reinke, K.; Turner, D.; Jones, S. A comparison of terrestrial and UAS sensors for measuring fuel hazard in a dry sclerophyll forest. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102261. [Google Scholar] [CrossRef]
- Yu, D.; He, L.; Ye, F.; Jiang, L.; Zhang, C.; Fang, Z.; Liang, Z. Unsupervised ground filtering of airborne-based 3D meshes using a robust cloth simulation. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102830. [Google Scholar] [CrossRef]
- Vosselman, G. Slope Based Filtering of Laser Altimetry Data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Meng, X.; Wang, L.; Silván-Cárdenas, J.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef]
- Susaki, J. Adaptive Slope Filtering of Airborne LiDAR Data in Urban Areas for Digital Terrain Model (DTM) Generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef]
- Wang, C.K.; Tseng, Y.H. Dual-directional profile filter for digital terrain model generation from airborne laser scanning data. J. Remote Sens. 2014, 8, 083619. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The Robot that Won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Goga, S.; Nedevschi, S. An approach for segmenting 3D LiDAR data using multi-volume grid structures. In Proceedings of the 2017 13th IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 7–9 September 2017; pp. 309–315. [Google Scholar] [CrossRef]
- Moosmann, F.; Pink, O.; Stiller, C. Segmentation of 3D lidar data in non-flat urban environments using a local convexity criterion. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 215–220. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]
- Rummelhard, L.; Paigwar, A.; Negre, A.; Laugier, C. Ground estimation and point cloud segmentation using SpatioTemporal Conditional Random Field. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1105–1110. [Google Scholar] [CrossRef]
- Zhang, M.; Morris, D.; Fu, R. Ground Segmentation Based on Loopy Belief Propagation for Sparse 3D Point Clouds. In Proceedings of the 2015 IEEE International Conference on 3D Vision (3DV), Lyon, France, 19–22 October 2015; pp. 615–622. [Google Scholar] [CrossRef]
- Haralick, R.; Sternberg, S.; Zhuang, X. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 532–550. [Google Scholar] [CrossRef] [PubMed]
- Schafer, R. Morphological filters—Part I: Their set-theoretic analysis and relations to linear shift-invariant filters. IEEE Trans. Acoust. 1987, 35, 1153–1169. [Google Scholar] [CrossRef]
- Soille, P. Morphological Operators; Academic Press: Cambridge, MA, USA, 2000; pp. 483–515. [Google Scholar] [CrossRef]
- Kilian, J.; Haala, N.; Englich, M. Capture and evaluation of airborne laser scanner data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vienna, Austria, 9–19 July 1996; Volume 31, pp. 383–388. [Google Scholar]
- Zhang, K.; Chen, S.; Whitman, D.; Shyu, M.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering Airborne Laser Scanning Data with Morphological Methods. Photogramm. Eng. Remote Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef]
- Pingel, T.; Clarke, K.; McBride, W. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Mongus, D.; Lukač, N.; Žalik, B. Ground and building extraction from LiDAR data based on differential morphological profiles and locally fitted surfaces. ISPRS J. Photogramm. Remote Sens. 2014, 93, 145–156. [Google Scholar] [CrossRef]
- Hao, Y.; Zhen, Z.; Li, F.; Zhao, Y. A graph-based progressive morphological filtering (GPMF) method for generating canopy height models using ALS data. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 84–96. [Google Scholar] [CrossRef]
- Li, Y.; Yong, B.; van Oosterom, P.; Lemmens, M.; Wu, H.; Ren, L.; Zheng, M.; Zhou, J. Airborne LiDAR Data Filtering Based on Geodesic Transformations of Mathematical Morphology. Remote Sens. 2017, 9, 1104. [Google Scholar] [CrossRef]
- Liu, L.; Lim, S. A voxel-based multiscale morphological airborne lidar filtering algorithm for digital elevation models for forest regions. Measurement 2018, 123, 135–144. [Google Scholar] [CrossRef]
- Schindler, J.; Dymond, J.; Wiser, S.; Shepherd, J. Method for national mapping spatial extent of southern beech forest using temporal spectral signatures. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102408. [Google Scholar] [CrossRef]
- Fong, W.; Mohan, R.; Hurtado, J.; Zhou, L.; Caesar, H.; Beijbom, O.; Valada, A. Panoptic nuScenes: A Large-Scale Benchmark for LiDAR Panoptic Segmentation and Tracking. IEEE Robot. Autom. Lett. 2021, 7, 3795–3802. [Google Scholar] [CrossRef]
- Cheng, Y.; Patel, A.; Wen, C.; Bullock, D.; Habib, A. Intensity Thresholding and Deep Learning Based Lane Marking Extraction and Lane Width Estimation from Mobile Light Detection and Ranging (LiDAR) Point Clouds. Remote Sens. 2020, 12, 1379. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, Z.; Schwertfeger, S. Mapping with Reflection—Detection and Utilization of Reflection in 3D Lidar Scans. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics, Abudhabi, United Arab Emirates, 4–6 November 2020; pp. 27–33. [Google Scholar] [CrossRef]
- Kukko, A.; Kaasalainen, S.; Litkey, P. Effect of incidence angle on laser scanner intensity and surface data. Appl. Opt. 2008, 47, 986–992. [Google Scholar] [CrossRef]
- Huang, W.; Liang, H.; Lin, L.; Wang, Z.; Wang, S.; Yu, B.; Niu, R. A Fast Point Cloud Ground Segmentation Approach Based on Coarse-To-Fine Markov Random Field. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7841–7854. [Google Scholar] [CrossRef]
- Maćkiewicz, A.; Ratajczak, W. Principal components analysis (PCA). Comput. Geosci. 1993, 19, 303–342. [Google Scholar] [CrossRef]
- Lee, S.; Lim, H.; Myung, H. Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 13276–13283. [Google Scholar] [CrossRef]
- Shen, Z.; Liang, H.; Lin, L.; Wang, Z.; Huang, W.; Yu, J. Fast Ground Segmentation for 3D LiDAR Point Cloud Based on Jump-Convolution-Process. Remote Sens. 2021, 13, 3239. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.; Vora, S.; Liong, V.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11618–11628. [Google Scholar] [CrossRef]
- Cohen, J. Weighted kappa: Nominal scale agreement provision for scaled disagreement or partial credit. Psychol. Bull. 1968, 70, 213–220. [Google Scholar] [CrossRef] [PubMed]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond Accuracy, F-Score and ROC: A Family of Discriminant Measures for Performance Evaluation. In Proceedings of the AI 2006: Advances in Artificial Intelligence; Sattar, A., Kang, B.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1015–1021. [Google Scholar]
- Rusu, R.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011. [Google Scholar]
- Geometron GmbH. Fade2.5D: C++ Delaunay Triangulation Library, 2D and 2.5D with Examples. Available online: https://www.geom.at/fade25d/html/ (accessed on 24 April 2024).
- Arora, S.; Barak, B. Computational Complexity: A Modern Approach; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Bailey, G.; Li, Y.; McKinney, N.; Yoder, D.; Wright, W.; Herrero, H. Comparison of Ground Point Filtering Algorithms for High-Density Point Clouds Collected by Terrestrial LiDAR. Remote Sens. 2022, 14, 4776. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, C.; Liu, H.; Tan, Y. Adaptive random sample consensus method for ground filtering of airborne LiDAR. J. Phys. Conf. Ser. 2023, 2478, 102030. [Google Scholar] [CrossRef]
- Fan, W.; Liu, X.; Zhang, Y.; Yue, D.; Wang, S.; Zhong, J. Airborne LiDAR Point Cloud Filtering Algorithm Based on Supervoxel Ground Saliency. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2024, X, 73–79. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenarios (Day) | Scenarios (Night) | |||||||
|---|---|---|---|---|---|---|---|---|
| Points | bobj | sobj | ped | rainy | bobj | sobj | ped | rainy |
| Ground | 397,807 | 700,934 | 568,069 | 480,057 | 530,289 | 683,107 | 634,778 | 507,694 |
| Objects | 1,025,658 | 688,002 | 820,475 | 908,719 | 858,359 | 705,829 | 753,806 | 880,922 |
| Scenarios (Day) | ||||||||
|---|---|---|---|---|---|---|---|---|
| bobj | sobj | ped | rainy | |||||
| Metrics | Mean | Range | Mean | Range | Mean | Range | Mean | Range |
| FPS (Hz) | ||||||||
| REE | 129.82 | 24.61 | 127.69 | 9.36 | 136.61 | 28.83 | 154.95 | 9.13 |
| WMBF | 55.93 | 10.29 | 46.69 | 4.20 | 51.12 | 5.45 | 59.62 | 2.33 |
| error_1 (%) | ||||||||
| REE | 14.31 | 17.98 | 6.73 | 4.53 | 5.07 | 10.68 | 1.28 | 0.25 |
| WMBF | 0.39 | 1.61 | 0.72 | 0.71 | 0.24 | 2.66 | 0.07 | 0.13 |
| error_2 (%) | ||||||||
| REE | 7.82 | 8.25 | 11.03 | 5.72 | 10.02 | 7.69 | 9.89 | 2.55 |
| WMBF | 3.54 | 3.12 | 3.15 | 1.89 | 6.26 | 3.83 | 2.22 | 1.06 |
| IoU_1 (%) | ||||||||
| REE | 74.83 | 28.58 | 87.88 | 5.73 | 88.06 | 14.52 | 92.83 | 1.47 |
| WMBF | 91.75 | 12.00 | 95.69 | 2.76 | 94.67 | 6.53 | 96.63 | 1.09 |
| IoU_2 (%) | ||||||||
| REE | 85.65 | 9.66 | 79.40 | 10.38 | 84.76 | 11.25 | 88.35 | 2.28 |
| WMBF | 96.22 | 4.37 | 93.07 | 5.89 | 95.43 | 9.71 | 95.76 | 2.53 |
| f1_score_1 (%) | ||||||||
| REE | 85.36 | 18.08 | 93.55 | 3.28 | 93.61 | 8.50 | 96.28 | 0.79 |
| WMBF | 96.38 | 8.36 | 97.80 | 1.45 | 97.25 | 3.48 | 98.29 | 0.72 |
| f1_score_2 (%) | ||||||||
| REE | 92.25 | 5.58 | 88.50 | 6.57 | 91.72 | 6.66 | 93.81 | 1.28 |
| WMBF | 97.39 | 2.21 | 98.87 | 3.21 | 97.49 | 7.16 | 97.78 | 1.35 |
| kappa_coeff (%) | ||||||||
| REE | 77.61 | 23.30 | 82.05 | 9.85 | 85.34 | 12.45 | 90.10 | 2.06 |
| WMBF | 92.01 | 7.17 | 93.67 | 4.65 | 92.76 | 10.06 | 95.07 | 2.06 |
| accuracy (%) | ||||||||
| REE | 90.05 | 9.63 | 91.75 | 4.38 | 92.87 | 6.13 | 95.36 | 0.97 |
| WMBF | 97.15 | 3.45 | 97.13 | 2.00 | 96.63 | 4.21 | 97.76 | 0.94 |
| Scenarios (Night) | ||||||||
|---|---|---|---|---|---|---|---|---|
| bobj | sobj | ped | rainy | |||||
| Metrics | Mean | Range | Mean | Range | Mean | Range | Mean | Range |
| FPS (Hz) | ||||||||
| REE | 128.63 | 34.34 | 126.32 | 20.62 | 126.78 | 44.24 | 132.85 | 20.18 |
| WMBF | 49.82 | 4.06 | 47.96 | 8.28 | 48.20 | 6.66 | 49.85 | 7.24 |
| error_1 (%) | ||||||||
| REE | 8.78 | 11.69 | 10.83 | 15.59 | 8.26 | 6.93 | 5.83 | 8.78 |
| WMBF | 0.61 | 1.68 | 5.75 | 7.24 | 1.30 | 0.94 | 0.60 | 1.11 |
| error_2 (%) | ||||||||
| REE | 12.43 | 6.37 | 13.64 | 13.51 | 12.46 | 2.55 | 18.11 | 20.87 |
| WMBF | 5.22 | 3.43 | 5.63 | 3.16 | 2.49 | 2.18 | 9.69 | 14.16 |
| IoU_1 (%) | ||||||||
| REE | 82.09 | 15.70 | 81.77 | 19.17 | 84.61 | 8.98 | 79.00 | 25.58 |
| WMBF | 92.52 | 8.67 | 88.87 | 13.52 | 93.62 | 4.49 | 89.98 | 17.13 |
| IoU_2 (%) | ||||||||
| REE | 80.02 | 7.35 | 72.00 | 32.83 | 78.04 | 5.20 | 77.36 | 17.79 |
| WMBF | 93.07 | 6.15 | 83.05 | 18.06 | 91.16 | 3.12 | 88.62 | 8.06 |
| f1_score_1 (%) | ||||||||
| REE | 90.10 | 9.61 | 89.87 | 11.73 | 91.65 | 5.38 | 88.08 | 16.73 |
| WMBF | 96.10 | 4.75 | 93.49 | 9.54 | 96.70 | 2.42 | 92.88 | 11.40 |
| f1_score_2 (%) | ||||||||
| REE | 88.89 | 4.59 | 83.40 | 23.02 | 87.66 | 3.29 | 87.16 | 11.52 |
| WMBF | 96.77 | 4.01 | 91.47 | 8.11 | 96.82 | 2.30 | 94.95 | 2.25 |
| kappa_coeff (%) | ||||||||
| REE | 79.00 | 13.66 | 73.38 | 29.12 | 79.31 | 6.94 | 75.42 | 20.76 |
| WMBF | 91.93 | 7.43 | 84.03 | 14.78 | 92.53 | 4.53 | 86.34 | 17.61 |
| accuracy (%) | ||||||||
| REE | 89.67 | 7.17 | 88.00 | 12.70 | 90.08 | 4.02 | 87.94 | 10.28 |
| WMBF | 96.06 | 4.49 | 92.17 | 10.14 | 96.48 | 2.37 | 92.67 | 7.47 |
| Method | Parameters | Tuning Strategy |
|---|---|---|
| FASTSeg3D | Empirical validation on nuScenes | |
| CSF [43] | Cloth resolution = 0.5 m, rigidness = 3, iterations = 500 | Default values from original paper |
| RANSAC [19] | Distance threshold = 0.3 m, max iterations = 1000 | Grid search on validation set |
| PTDF [23] | Max edge length = 1.5 m, angle threshold = 5° | As per PCL implementation |
| PatchWork++ [75] | Sector size = 100, elevation threshold = 0.1 m | Default values from GitHub v1.0 repo |
| JPC [76] | Jump distance = 0.5 m, height threshold = 0.2 m | Author-provided configuration |
| Scenarios (Day) | ||||||||
|---|---|---|---|---|---|---|---|---|
| bobj | sobj | ped | rainy | |||||
| Metrics | Mean | Range | Mean | Range | Mean | Range | Mean | Range |
| FPS (Hz) | ||||||||
| Proposed | 55.93 | 10.29 | 46.69 | 4.20 | 51.12 | 5.45 | 59.62 | 2.33 |
| CSF [43] | 0.41 | 1.39 | 0.22 | 0.48 | 0.16 | 0.88 | 0.25 | 0.28 |
| RANSAC [19] | 10.76 | 6.29 | 11.03 | 1.27 | 11.71 | 3.19 | 13.38 | 1.22 |
| PTDF [23] | 0.47 | 1.42 | 0.25 | 0.49 | 0.24 | 0.76 | 0.38 | 0.17 |
| PatchWork++ [75] | 5.29 | 0.98 | 4.63 | 0.19 | 4.92 | 0.62 | 5.33 | 0.12 |
| JPC [76] | 45.00 | 17.22 | 39.72 | 13.31 | 47.44 | 10.19 | 50.87 | 7.53 |
| error_1 (%) | ||||||||
| Proposed | 0.39 | 1.61 | 0.72 | 0.71 | 0.24 | 2.66 | 0.07 | 0.13 |
| CSF [43] | 5.63 | 53.30 | 0.50 | 1.40 | 1.60 | 7.19 | 0.13 | 0.56 |
| RANSAC [19] | 0.43 | 1.82 | 7.12 | 8.65 | 1.45 | 5.19 | 7.24 | 3.43 |
| PTDF [23] | 7.19 | 6.22 | 9.65 | 10.95 | 6.36 | 9.45 | 6.87 | 3.78 |
| PatchWork++ [75] | 4.17 | 10.98 | 7.64 | 7.76 | 4.12 | 10.50 | 3.58 | 0.97 |
| JPC [76] | 2.14 | 5.02 | 5.99 | 3.31 | 1.79 | 4.07 | 0.28 | 0.23 |
| error_2 (%) | ||||||||
| Proposed | 3.54 | 3.12 | 3.15 | 1.89 | 6.26 | 3.83 | 2.22 | 1.06 |
| CSF [43] | 11.09 | 49.64 | 6.88 | 3.73 | 10.66 | 17.59 | 4.81 | 1.75 |
| RANSAC [19] | 5.93 | 4.33 | 3.88 | 2.90 | 9.67 | 24.59 | 7.68 | 2.41 |
| PTDF [23] | 13.31 | 38.12 | 10.14 | 4.22 | 11.45 | 15.66 | 8.91 | 3.93 |
| PatchWork++ [75] | 2.42 | 2.80 | 4.46 | 1.94 | 4.03 | 5.17 | 2.54 | 2.49 |
| JPC [76] | 7.74 | 7.13 | 9.86 | 2.40 | 11.28 | 14.06 | 11.98 | 1.09 |
| IoU_1 (%) | ||||||||
| Proposed | 91.75 | 12.00 | 95.69 | 2.76 | 94.67 | 6.53 | 96.63 | 1.09 |
| CSF [43] | 73.52 | 62.04 | 93.20 | 3.07 | 84.97 | 27.49 | 91.54 | 2.67 |
| RANSAC [19] | 90.90 | 10.00 | 90.89 | 8.11 | 91.71 | 18.45 | 88.32 | 4.56 |
| PTDF [23] | 72.11 | 48.29 | 89.70 | 5.09 | 82.11 | 31.32 | 90.22 | 3.21 |
| PatchWork++ [75] | 89.96 | 17.35 | 88.48 | 6.38 | 90.49 | 10.15 | 92.32 | 1.39 |
| JPC [76] | 84.65 | 23.51 | 88.41 | 3.35 | 89.45 | 10.84 | 92.18 | 0.85 |
| IoU_2 (%) | ||||||||
| Proposed | 96.22 | 4.37 | 93.07 | 5.89 | 95.43 | 9.71 | 95.76 | 2.53 |
| CSF [43] | 87.28 | 49.69 | 92.64 | 3.22 | 88.36 | 17.63 | 95.13 | 1.70 |
| RANSAC [19] | 93.78 | 4.00 | 85.19 | 13.78 | 88.68 | 26.50 | 83.16 | 6.26 |
| PTDF [23] | 86.52 | 39.23 | 89.67 | 6.22 | 86.23 | 19.40 | 92.33 | 8.10 |
| PatchWork++ [75] | 96.08 | 5.19 | 88.62 | 6.40 | 89.74 | 12.59 | 92.02 | 2.75 |
| JPC [76] | 91.90 | 12.32 | 89.16 | 3.85 | 91.83 | 10.81 | 90.01 | 4.26 |
| f1_score_1 (%) | ||||||||
| Proposed | 96.38 | 8.36 | 97.80 | 1.45 | 97.25 | 3.48 | 98.29 | 0.72 |
| CSF [43] | 84.04 | 50.62 | 96.48 | 1.65 | 91.74 | 17.47 | 95.58 | 1.46 |
| RANSAC [19] | 95.21 | 5.50 | 95.22 | 4.54 | 95.63 | 10.65 | 93.80 | 2.53 |
| PTDF [23] | 81.44 | 33.10 | 92.38 | 2.52 | 89.30 | 12.98 | 93.47 | 2.22 |
| PatchWork++ [75] | 94.68 | 9.95 | 93.88 | 3.62 | 94.99 | 5.69 | 96.00 | 0.75 |
| JPC [76] | 91.58 | 14.13 | 93.85 | 1.88 | 94.41 | 6.18 | 95.93 | 0.46 |
| f1_score_2 (%) | ||||||||
| Proposed | 97.39 | 2.21 | 98.87 | 3.21 | 97.49 | 5.16 | 97.78 | 1.35 |
| CSF [43] | 93.00 | 35.08 | 96.18 | 1.73 | 93.77 | 10.45 | 97.50 | 0.90 |
| RANSAC [19] | 96.79 | 2.13 | 91.98 | 8.30 | 93.86 | 16.40 | 90.80 | 3.65 |
| PTDF [23] | 90.03 | 38.22 | 91.43 | 3.40 | 92.12 | 11.06 | 95.49 | 4.10 |
| PatchWork++ [75] | 98.00 | 2.72 | 93.96 | 3.62 | 96.49 | 3.90 | 97.71 | 2.05 |
| JPC [76] | 95.43 | 4.00 | 90.33 | 3.16 | 92.94 | 8.17 | 93.42 | 0.67 |
| kappa_coeff (%) | ||||||||
| Proposed | 92.01 | 7.17 | 93.67 | 4.65 | 92.76 | 10.06 | 95.07 | 2.06 |
| CSF [43] | 77.57 | 68.34 | 92.66 | 3.37 | 85.61 | 27.06 | 93.09 | 2.34 |
| RANSAC [19] | 88.81 | 17.31 | 87.21 | 12.71 | 89.52 | 26.38 | 84.60 | 6.16 |
| PTDF [23] | 78.43 | 62.08 | 88.54 | 4.37 | 82.03 | 27.85 | 88.75 | 4.26 |
| PatchWork++ [75] | 92.68 | 11.25 | 87.85 | 7.21 | 91.49 | 9.15 | 93.71 | 2.56 |
| JPC [76] | 87.05 | 17.20 | 84.18 | 5.03 | 87.38 | 13.78 | 89.37 | 1.10 |
| accuracy (%) | ||||||||
| Proposed | 97.15 | 3.45 | 97.13 | 2.00 | 96.63 | 4.21 | 97.76 | 0.94 |
| CSF [43] | 90.46 | 40.89 | 96.33 | 1.69 | 92.93 | 13.18 | 96.81 | 1.11 |
| RANSAC [19] | 96.22 | 3.14 | 94.01 | 5.89 | 94.94 | 12.85 | 92.59 | 2.98 |
| PTDF [23] | 87.93 | 38.77 | 90.01 | 5.01 | 90.31 | 13.27 | 90.79 | 4.79 |
| PatchWork++ [75] | 94.62 | 8.25 | 93.92 | 3.62 | 95.90 | 4.36 | 97.10 | 1.53 |
| JPC [76] | 94.19 | 6.47 | 92.49 | 2.36 | 93.81 | 6.88 | 94.97 | 0.53 |
| Scenarios (Night) | ||||||||
|---|---|---|---|---|---|---|---|---|
| bobj | sobj | ped | rainy | |||||
| Metrics | Mean | Range | Mean | Range | Mean | Range | Mean | Range |
| FPS (Hz) | ||||||||
| Proposed | 49.82 | 4.06 | 47.96 | 8.28 | 48.20 | 6.66 | 49.85 | 7.24 |
| CSF [43] | 0.17 | 0.61 | 0.33 | 0.65 | 0.15 | 0.13 | 0.09 | 0.28 |
| RANSAC [19] | 11.46 | 1.60 | 10.68 | 1.19 | 11.28 | 2.67 | 11.40 | 1.81 |
| PTDF [23] | 0.11 | 0.44 | 0.18 | 0.70 | 0.30 | 0.23 | 0.05 | 0.14 |
| PatchWork++ [75] | 4.88 | 0.47 | 4.68 | 0.73 | 4.63 | 0.37 | 4.87 | 0.65 |
| JPC [76] | 42.79 | 18.39 | 39.67 | 18.16 | 42.64 | 40.20 | 42.06 | 23.95 |
| error_1 (%) | ||||||||
| Proposed | 0.61 | 1.68 | 5.75 | 7.24 | 1.30 | 0.94 | 0.60 | 1.11 |
| CSF [43] | 1.46 | 4.90 | 3.41 | 6.35 | 1.42 | 3.18 | 0.99 | 2.46 |
| RANSAC [19] | 4.25 | 8.60 | 21.47 | 26.14 | 6.50 | 5.38 | 5.58 | 16.60 |
| PTDF [23] | 6.79 | 9.68 | 16.10 | 19.49 | 5.68 | 8.96 | 6.55 | 13.04 |
| PatchWork++ [75] | 6.72 | 7.86 | 13.96 | 15.41 | 8.70 | 7.29 | 8.11 | 13.58 |
| JPC [76] | 4.25 | 11.39 | 12.26 | 24.36 | 9.21 | 9.16 | 4.15 | 7.80 |
| error_2 (%) | ||||||||
| Proposed | 5.22 | 3.43 | 5.63 | 3.16 | 2.49 | 2.18 | 9.69 | 14.16 |
| CSF [43] | 10.12 | 10.33 | 11.70 | 18.14 | 6.82 | 3.29 | 17.94 | 24.95 |
| RANSAC [19] | 7.57 | 8.98 | 7.08 | 12.36 | 2.68 | 3.02 | 11.57 | 20.41 |
| PTDF [23] | 11.44 | 9.23 | 9.45 | 12.89 | 5.24 | 6.11 | 19.13 | 26.71 |
| PatchWork++ [75] | 3.77 | 2.17 | 5.97 | 5.44 | 3.77 | 1.37 | 7.82 | 10.92 |
| JPC [76] | 8.81 | 6.75 | 10.34 | 6.83 | 8.38 | 3.63 | 15.55 | 17.23 |
| IoU_1 (%) | ||||||||
| Proposed | 92.52 | 8.67 | 88.87 | 13.52 | 93.62 | 4.49 | 89.98 | 17.13 |
| CSF [43] | 84.42 | 20.75 | 84.73 | 28.68 | 91.13 | 8.15 | 74.62 | 40.84 |
| RANSAC [19] | 89.23 | 11.88 | 74.19 | 22.72 | 91.83 | 5.53 | 83.30 | 24.08 |
| PTDF [23] | 82.11 | 21.03 | 85.21 | 26.22 | 89.28 | 9.19 | 75.11 | 37.18 |
| PatchWork++ [75] | 87.89 | 8.92 | 80.44 | 15.27 | 87.39 | 7.66 | 80.05 | 27.57 |
| JPC [76] | 87.74 | 9.36 | 81.18 | 18.05 | 85.35 | 10.37 | 80.59 | 21.11 |
| IoU_2 (%) | ||||||||
| Proposed | 93.07 | 6.15 | 83.05 | 18.06 | 91.16 | 3.12 | 88.62 | 8.06 |
| CSF [43] | 89.12 | 10.94 | 85.05 | 16.88 | 92.10 | 3.27 | 81.53 | 23.20 |
| RANSAC [19] | 88.25 | 8.54 | 66.09 | 40.45 | 88.74 | 6.46 | 83.50 | 16.74 |
| PTDF [23] | 85.10 | 11.90 | 80.77 | 20.02 | 88.60 | 5.10 | 80.45 | 25.49 |
| PatchWork++ [75] | 92.38 | 6.69 | 81.72 | 20.76 | 89.72 | 3.19 | 87.93 | 9.22 |
| JPC [76] | 87.40 | 5.66 | 73.49 | 36.44 | 81.75 | 5.65 | 81.24 | 15.23 |
| f1_score_1 (%) | ||||||||
| Proposed | 96.10 | 4.75 | 93.49 | 9.54 | 96.70 | 2.42 | 92.88 | 11.40 |
| CSF [43] | 91.47 | 12.59 | 91.55 | 18.03 | 95.35 | 4.56 | 84.89 | 28.67 |
| RANSAC [19] | 94.28 | 6.58 | 85.05 | 14.92 | 95.74 | 3.05 | 90.73 | 14.67 |
| PTDF [23] | 90.23 | 13.40 | 88.60 | 21.32 | 93.40 | 6.01 | 80.30 | 25.31 |
| PatchWork++ [75] | 93.54 | 5.11 | 89.12 | 9.55 | 93.26 | 4.44 | 88.73 | 18.05 |
| JPC [76] | 93.45 | 5.41 | 89.52 | 11.30 | 92.08 | 6.19 | 89.12 | 13.35 |
| f1_score_2 (%) | ||||||||
| Proposed | 96.77 | 4.01 | 91.47 | 8.11 | 96.82 | 2.30 | 94.95 | 2.25 |
| CSF [43] | 94.22 | 6.22 | 91.87 | 10.19 | 95.89 | 1.78 | 89.66 | 14.48 |
| RANSAC [19] | 93.75 | 4.75 | 78.84 | 29.69 | 94.03 | 3.69 | 90.95 | 10.03 |
| PTDF [23] | 90.33 | 7.80 | 86.77 | 12.21 | 90.98 | 4.71 | 87.11 | 17.51 |
| PatchWork++ [75] | 96.03 | 3.66 | 89.82 | 12.91 | 94.58 | 1.77 | 93.55 | 5.26 |
| JPC [76] | 93.27 | 3.24 | 84.22 | 25.57 | 89.95 | 3.43 | 89.61 | 9.56 |
| kappa_coeff (%) | ||||||||
| Proposed | 91.93 | 7.43 | 84.03 | 14.78 | 92.53 | 4.53 | 86.34 | 17.61 |
| CSF [43] | 85.75 | 18.22 | 83.51 | 27.59 | 91.25 | 6.31 | 75.19 | 40.02 |
| RANSAC [19] | 88.04 | 11.33 | 64.93 | 39.99 | 89.77 | 6.04 | 81.76 | 22.26 |
| PTDF [23] | 76.79 | 16.09 | 83.76 | 18.60 | 86.34 | 6.93 | 75.73 | 39.30 |
| PatchWork++ [75] | 89.57 | 7.78 | 79.02 | 18.51 | 87.85 | 5.43 | 82.33 | 22.42 |
| JPC [76] | 86.74 | 7.91 | 73.98 | 33.98 | 82.04 | 9.16 | 78.88 | 19.49 |
| accuracy (%) | ||||||||
| Proposed | 96.06 | 4.49 | 92.17 | 10.14 | 96.48 | 2.37 | 92.67 | 7.47 |
| CSF [43] | 93.13 | 8.34 | 91.97 | 13.67 | 95.65 | 2.84 | 87.81 | 19.59 |
| RANSAC [19] | 94.09 | 5.78 | 82.87 | 19.99 | 95.04 | 3.07 | 91.00 | 11.36 |
| PTDF [23] | 89.46 | 8.22 | 85.46 | 13.41 | 92.02 | 3.04 | 84.94 | 17.38 |
| PatchWork++ [75] | 95.11 | 3.60 | 89.79 | 9.45 | 94.02 | 2.24 | 91.93 | 8.39 |
| JPC [76] | 93.44 | 3.93 | 87.81 | 15.17 | 91.18 | 4.84 | 89.59 | 10.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oladele, D.A.; Markus, E.D.; Abu-Mahfouz, A.M. FASTSeg3D: A Fast, Efficient, and Adaptive Ground Filtering Algorithm for 3D Point Clouds in Mobile Sensing Applications. AI 2025, 6, 97. https://doi.org/10.3390/ai6050097
Oladele DA, Markus ED, Abu-Mahfouz AM. FASTSeg3D: A Fast, Efficient, and Adaptive Ground Filtering Algorithm for 3D Point Clouds in Mobile Sensing Applications. AI. 2025; 6(5):97. https://doi.org/10.3390/ai6050097
Chicago/Turabian StyleOladele, Daniel Ayo, Elisha Didam Markus, and Adnan M. Abu-Mahfouz. 2025. "FASTSeg3D: A Fast, Efficient, and Adaptive Ground Filtering Algorithm for 3D Point Clouds in Mobile Sensing Applications" AI 6, no. 5: 97. https://doi.org/10.3390/ai6050097
APA StyleOladele, D. A., Markus, E. D., & Abu-Mahfouz, A. M. (2025). FASTSeg3D: A Fast, Efficient, and Adaptive Ground Filtering Algorithm for 3D Point Clouds in Mobile Sensing Applications. AI, 6(5), 97. https://doi.org/10.3390/ai6050097