
A NEAT Based Two Stage Neural Network Approach to Generate a Control Algorithm for a Pultrusion System



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction—Neural Networks in Engineering. Just a Modern Buzzword?
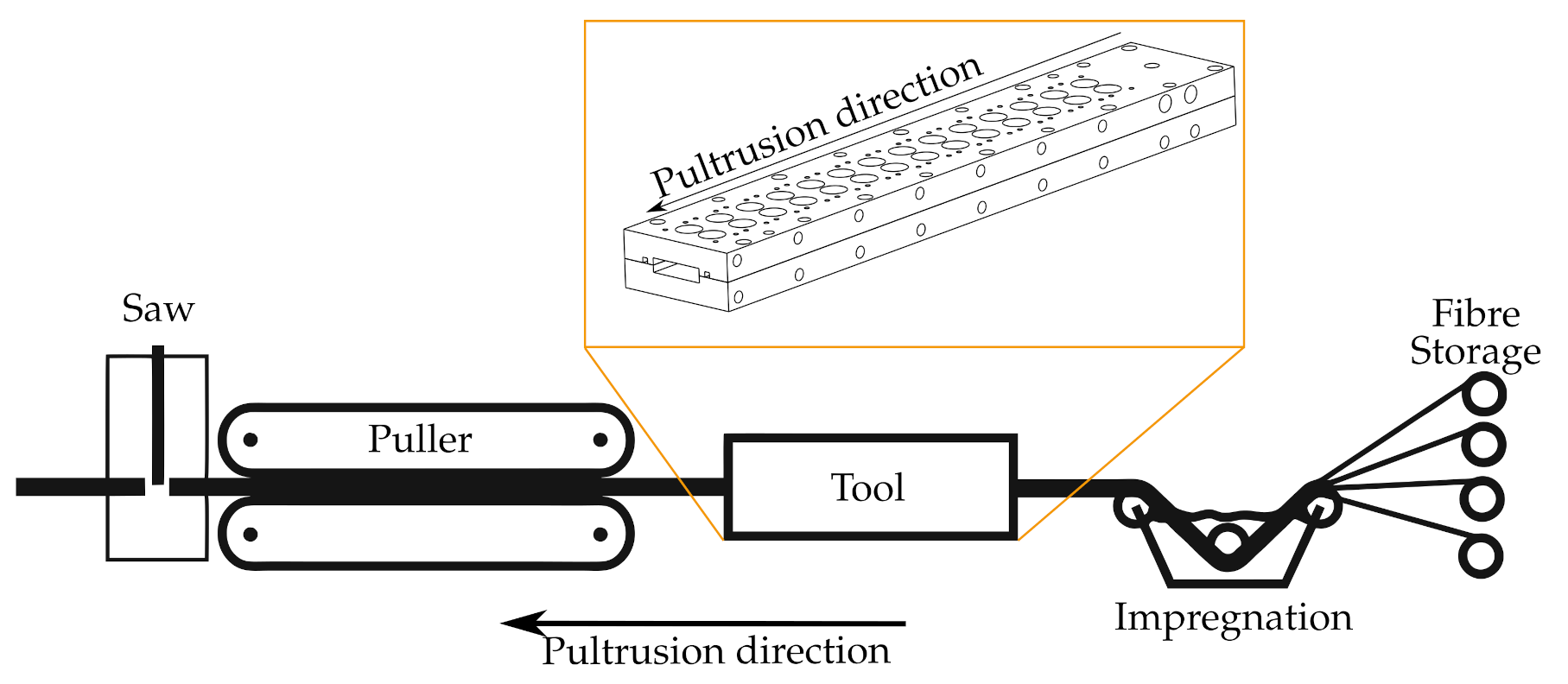
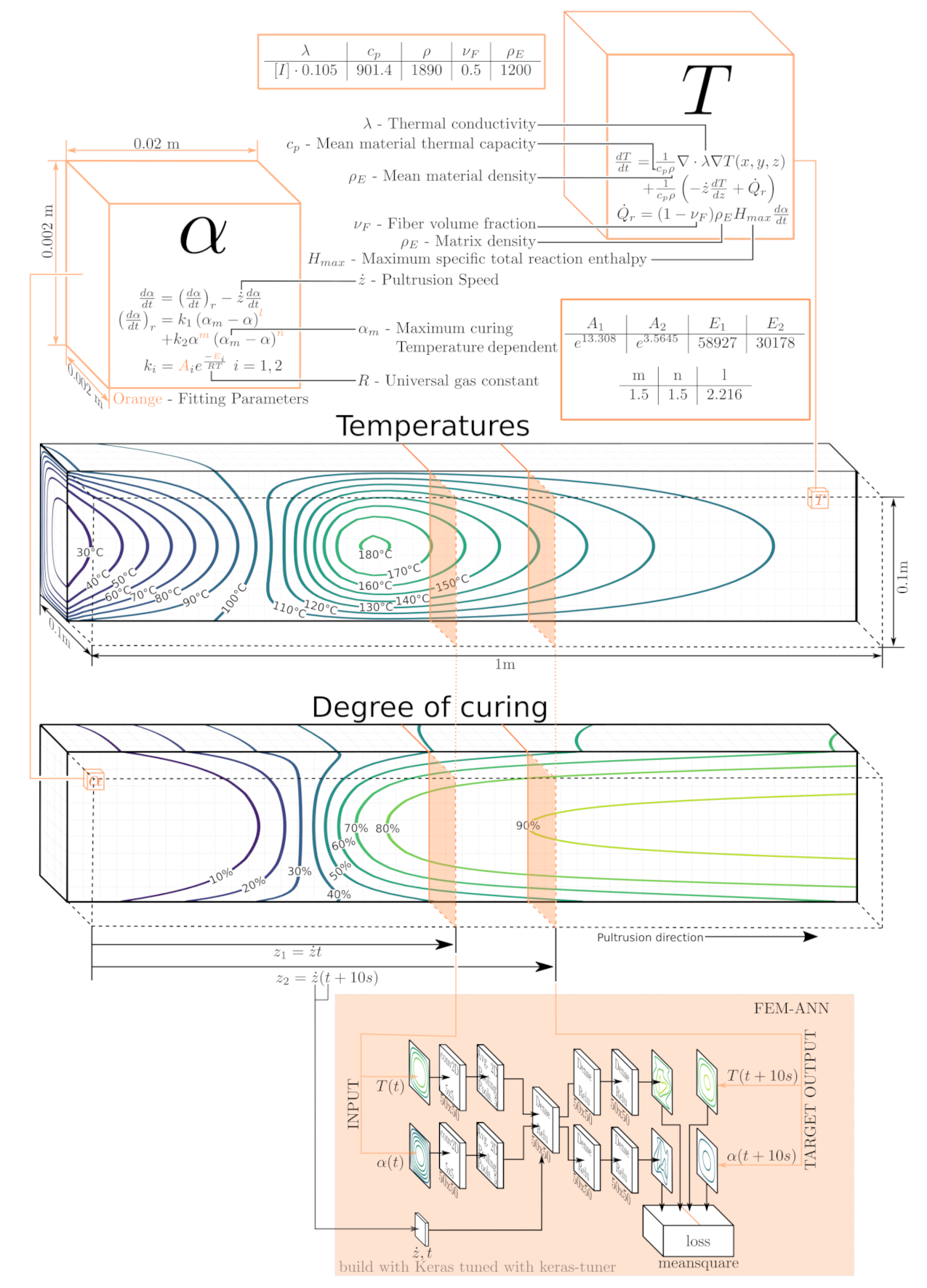
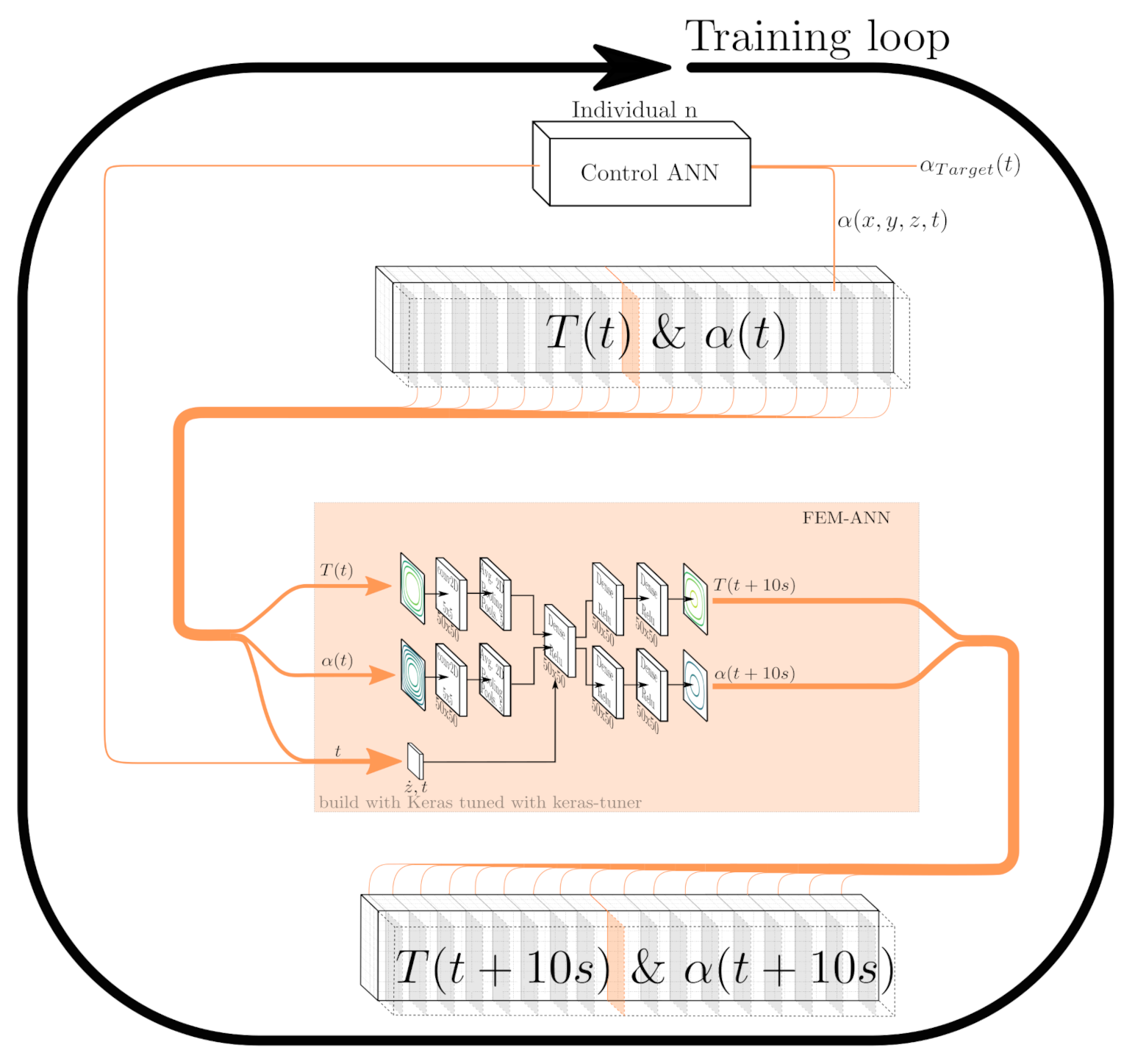
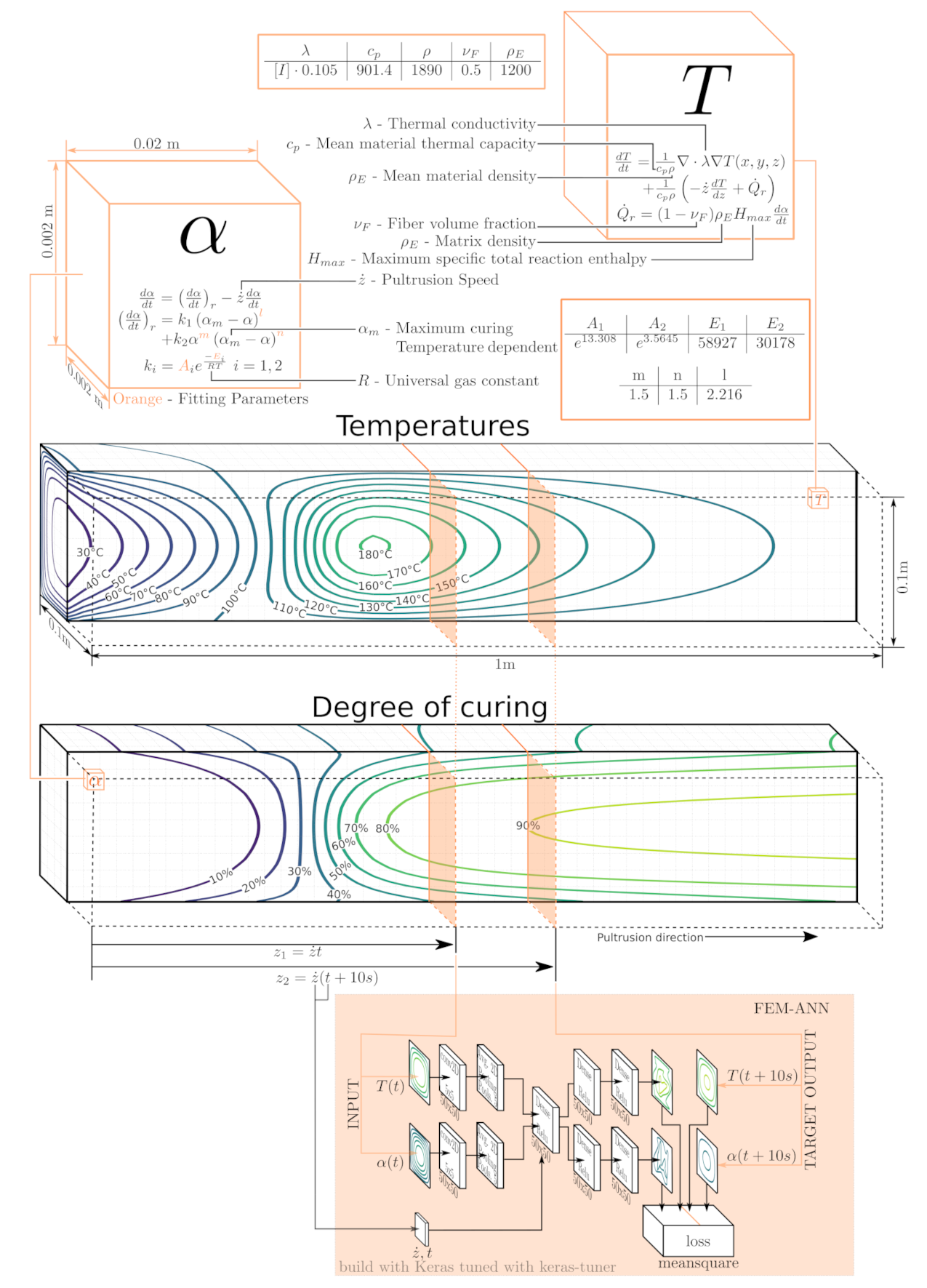
2. Pultrusion Model and Neural Network Training
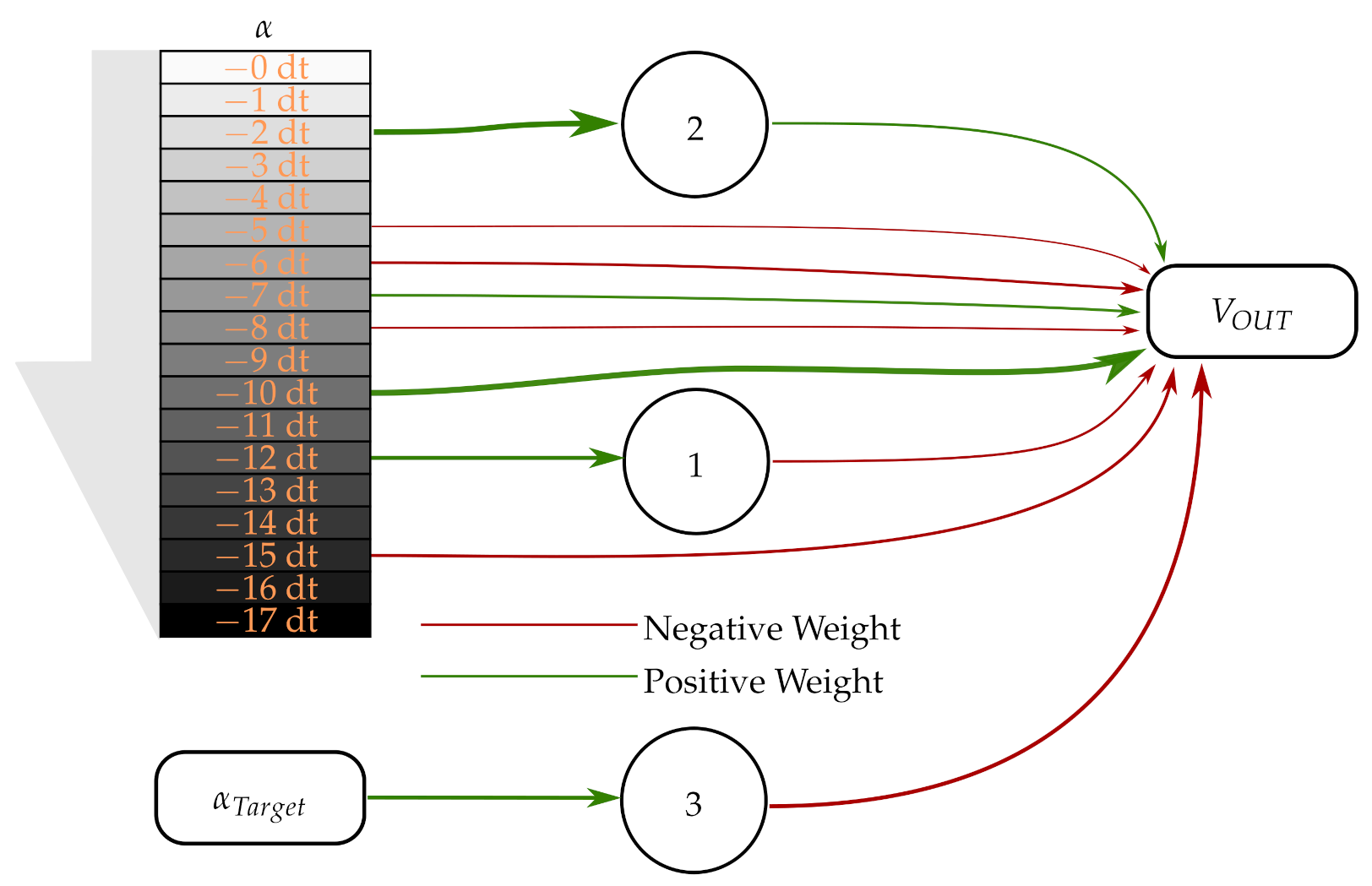
- The further an individual gets, the higher the fitness function result should be
- If a gate is missed, the fitness function should reflect the distance from the respective gate
- The fitness function should output the highest value when the curing target is reached
3. Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ANN | Artifcial Neural Network |
| NEAT | NeuroEvolution of Augmenting Topologies |
| FE | Finite Elements |
| HPC | High Performance Computer |
Appendix A. Hyperparamter NEAT-Model
| [NEAT] | |
| fitness_criterion | = max |
| fitness_threshold | = 20,000.0 |
| pop_size | = 250 |
| reset_on_extinction | = 1 |
| [DefaultGenome] | |
| num_hidden | = 1 |
| num_inputs | = 20 |
| num_outputs | = 1 |
| initial_connection | = partial_direct 0.5 |
| feed_forward | = True |
| compatibility_disjoint_coefficient = 1.0 | |
| compatibility_weight_coefficient = 0.6 | |
| conn_add_prob | = 0.05 |
| conn_delete_prob | = 0.05 |
| node_add_prob | = 0.05 |
| node_delete_prob | = 0.05 |
| activation_default | = sigmoid |
| activation_options | = sigmoid |
| activation_mutate_rate | = 0.0 |
| aggregation_default | = sum |
| aggregation_options | = sum |
| aggregation_mutate_rate | = 0.0 |
| bias_init_mean | = 0.0 |
| bias_init_stdev | = 1.0 |
| bias_replace_rate | = 0.01 |
| bias_mutate_rate | = 0.7 |
| bias_mutate_power | = 0.005 |
| bias_max_value | = 30.0 |
| bias_min_value | = −30.0 |
| response_init_mean | = 1.0 |
| response_init_stdev | = 0.0 |
| response_replace_rate | = 0.0 |
| response_mutate_rate | = 0.0 |
| response_mutate_power | = 0.0 |
| response_max_value | = 30.0 |
| response_min_value | = −30.0 |
| weight_max_value | = 30 |
| weight_min_value | = −30 |
| weight_init_mean | = 0.0 |
| weight_init_stdev | = 1.0 |
| weight_mutate_rate | = 0.8 |
| weight_replace_rate | = 0.01 |
| weight_mutate_power | = 0.005 |
| enabled_default | = True |
| enabled_mutate_rate | = 0.01 |
| [DefaultSpeciesSet] | |
| compatibility_threshold = 3.0 | |
| [DefaultStagnation] | |
| species_fitness_func = max | |
| max_stagnation = 40 | |
| species_elitism = 2 | |
| [DefaultReproduction] | |
| elitism = 3 | |
| survival_threshold = 0.2 | |
References
- Alkinani, H.H.; Al-Hameedi, A.T.; Dunn-Norman, S.; Flori, R.E.; Alsaba, M.T.; Amer, A.S. Applications of Artificial Neural Networks in the Petroleum Industry: A Review. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 18–21 March 2019; OnePetro: Manama, Bahrain, 2019. [Google Scholar] [CrossRef]
- Gonzalez-Fernandez, I.; Iglesias-Otero, M.A.; Esteki, M.; Moldes, O.A.; Mejuto, J.C.; Simal-Gandara, J. A critical review on the use of artificial neural networks in olive oil production, characterization and authentication. Crit. Rev. Food Sci. Nutr. 2019, 59, 1913–1926. [Google Scholar] [CrossRef] [PubMed]
- Khoo, Y.; Lu, J.; Ying, L. Solving parametric PDE problems with artificial neural networks. Eur. J. Appl. Math. 2021, 32, 421–435. [Google Scholar] [CrossRef]
- Mohandes, S.R.; Zhang, X.; Mahdiyar, A. A comprehensive review on the application of artificial neural networks in building energy analysis. Neurocomputing 2019, 340, 55–75. [Google Scholar] [CrossRef]
- Travassos, X.L.; Avila, S.L.; Ida, N. Artificial Neural Networks and Machine Learning techniques applied to Ground Penetrating Radar: A review. Appl. Comput. Inform. 2020, 17, 296–308. [Google Scholar] [CrossRef]
- Yeganeh, A.; Shadman, A. Monitoring linear profiles using Artificial Neural Networks with run rules. Expert Syst. Appl. 2021, 168, 114237. [Google Scholar] [CrossRef]
- Alanis, A.Y.; Arana-Daniel, N.; López-Franco, C. (Eds.) Artificial Neural Networks for Engineering Applications; Elsevier: St. Louis, MO, USA, 2019. [Google Scholar]
- Pancioni, L.; Schwenker, F.; Trentin, E. Artificial Neural Networks in Pattern Recognition; Springer International Publishing: Cham, Switzerland, 2018; Volume 11081. [Google Scholar] [CrossRef] [Green Version]
- Adhan, S.; Pintavirooj, C. Thai sign language recognition by using geometric invariant feature and ANN classification. In Proceedings of the 2016 9th Biomedical Engineering International Conference (BMEiCON), Laung Prabang, Laos, 7–9 December 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Trentin, E.; Gori, M. A survey of hybrid ANN/HMM models for automatic speech recognition. Neurocomputing 2001, 37, 91–126. [Google Scholar] [CrossRef] [Green Version]
- Paul, P.S.; Varadarajan, A.S. ANN assisted sensor fusion model to predict tool wear during hard turning with minimal fluid application. Int. J. Mach. Mach. Mater. 2013, 13, 398. [Google Scholar] [CrossRef]
- Gourdeau, D.; Archambault, L. Discriminative neural network for hero selection in professional Heroes of the Storm and DOTA 2. IEEE Trans. Games 2020, 1. [Google Scholar] [CrossRef]
- Zhang, H.; Luo, Y.; Liu, D. Neural-network-based near-optimal control for a class of discrete-time affine nonlinear systems with control constraints. IEEE Trans. Neural Netw. 2009, 20, 1490–1503. [Google Scholar] [CrossRef] [PubMed]
- Stanley, K.O. Efficient Evolution of Neural Networks through Complexification. Ph.D. Dissertation, The University of Texas at Austin, Austin, TX, USA, 2004. [Google Scholar]
- Caceres, C.; Rosario, J.M.; Amaya, D. Approach of Kinematic Control for a Nonholonomic Wheeled Robot using Artificial Neural Networks and Genetic Algorithms. In Proceedings of the 2017 International Conference and Workshop on Bioinspired Intelligence (IWOBI), Funchal, Portugal, 10–12 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Pommer, C.; Sinapius, M. Proof of Concept for Pultrusion Control by Cure Monitoring Using Resonant Ultrasound Spectroscopy. J. Compos. Sci. 2020, 4, 115. [Google Scholar] [CrossRef]
- Pommer, C.; Sinapius, M. A Novel Approach to Monitoring the Curing of Epoxy in Closed Tools by Use of Ultrasonic Spectroscopy. Sensors 2017, 18, 96. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pommer, C. Geregelter Pultrusionsprozess mit In-Situ-Aushärtungsüberwachung. Ph.D. Dissertation, DLR, Deutsches Zentrum für Luft- und Raumfahrt, Köln, Germany, 2019. [Google Scholar]
- Gupta, J.N.; Sexton, R.S. Comparing backpropagation with a genetic algorithm for neural network training. Omega 1999, 27, 679–684. [Google Scholar] [CrossRef]
- Such, F.P.; Madhavan, V.; Conti, E.; Lehman, J.; Stanley, K.O.; Clune, J. Deep Neuroevolution: Genetic Algorithms Are a Competitive Alternative for Training Deep Neural Networks for Reinforcement Learning. arXiv 2017, arXiv:cs.NE/1712.06567. [Google Scholar]
- Awolusi, T.; Oke, O.; Akinkurolere, O.; Sojobi, A.; Aluko, O. Performance comparison of neural network training algorithms in the modeling properties of steel fiber reinforced concrete. Heliyon 2019, 5, e01115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McIntyre, A.; Kallada, M.; Miguel, C.G.; da Silva, C.F. Neat-Python. Available online: https://github.com/CodeReclaimers/neat-python (accessed on 12 May 2021).


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pommer, C.; Sinapius, M.; Brysch, M.; Al Natsheh, N. A NEAT Based Two Stage Neural Network Approach to Generate a Control Algorithm for a Pultrusion System. AI 2021, 2, 355-365. https://doi.org/10.3390/ai2030022
Pommer C, Sinapius M, Brysch M, Al Natsheh N. A NEAT Based Two Stage Neural Network Approach to Generate a Control Algorithm for a Pultrusion System. AI. 2021; 2(3):355-365. https://doi.org/10.3390/ai2030022
Chicago/Turabian StylePommer, Christian, Michael Sinapius, Marco Brysch, and Naser Al Natsheh. 2021. "A NEAT Based Two Stage Neural Network Approach to Generate a Control Algorithm for a Pultrusion System" AI 2, no. 3: 355-365. https://doi.org/10.3390/ai2030022
APA StylePommer, C., Sinapius, M., Brysch, M., & Al Natsheh, N. (2021). A NEAT Based Two Stage Neural Network Approach to Generate a Control Algorithm for a Pultrusion System. AI, 2(3), 355-365. https://doi.org/10.3390/ai2030022